tamaño: 2681184B
Anuncio

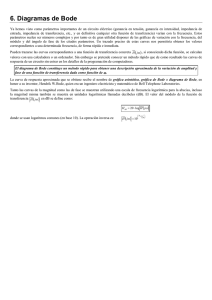
5 Sistemas de primer orden En los capítulos anteriores se ha visto cómo obtener la función de transferencia para cualquier sistema lineal e invariante en el tiempo y cómo utilizar esa función de transferencia, independientemente del orden de la misma, para calcular la respuesta temporal, libre más forzada, ante cualquier entrada y conjunto de condiciones iniciales y la respuesta en frecuencia en régimen permanente para entradas constantes o senoidales. Con este bagaje teórico es posible afrontar el análisis de cualquier sistema dinámico, sea cual sea su orden, con la única restricción de la linealidad y la invarianza temporal. Sin embargo, una parte considerable de los sistemas dinámicos que se encuentran en aplicaciones industriales se corresponden con sistemas de orden bajo, primer y segundo orden, por lo que conocer en detalle las características de la respuesta temporal y de la respuesta en frecuencia de este tipo de sistemas agiliza en gran medida su análisis y muchas de las decisiones de diseño. Esta razón justifica un estudio pormenorizado de este tipo de sistemas. Este capítulo profundiza en el análisis de la respuesta temporal y de la respuesta en frecuencia de los sistemas de primer orden, mientras que el siguiente capítulo se centrará en los sistemas de segundo orden. 5.1 Clasificación de los sistemas de primer orden La función de transferencia de un sistema de primer orden se caracteriza por tener el polinomio del denominador de primer grado. En función de cómo sea el numerador, se consideran tres tipos de sistemas de primer orden: 1. Sistema de primer orden sin cero: tiene una constante como numerador. G(s) = Y (s) K = U(s) 1+ τ s Los parámetros que aparecen en la función de transferencia son la ganancia K, que coincide con la ganancia estática G(0), y la constante de tiempo τ. La ganancia estática K puede tener cualquier signo, sin embargo para que este sistema sea estable se debe cumplir que τ > 0 . Teniendo en cuenta esta restricción, no se incluye el caso particular del integrador G(s) = 1 s . 5–1 2. Sistema de primer orden con cero nulo o derivador filtrado. G(s) = Y (s) Ks = U(s) 1+ τ s Los parámetros que aparecen en la función de transferencia son la ganancia K, que en este caso no coincide con la ganancia estática G(0) que es igual a 0, y la constante de tiempo τ. La ganancia K puede tener cualquier signo, mientras que τ debe ser positivo para que el sistema sea estable. 3. Sistema de primer orden con cero no nulo. G(s) = Y (s) K (1+ Ts ) = U(s) 1+ τ s En este último caso, los parámetros son la ganancia K, que vuelve a coincidir con la ganancia estática G(0) como en el sistema de primer sin cero, la constante de tiempo T asociada al cero y la constante de tiempo τ asociada al polo o constante de tiempo del sistema. La ganancia K y la constante de tiempo T pueden tener cualquier signo, mientras que τ debe ser positivo para que el sistema sea estable. En las figuras 5.1, 5.2 y 5.3 se muestran tres ejemplos de circuitos electrónicos montados con amplificadores operacionales, resistencias y condensadores cuyas funciones de transferencia se corresponden, respectivamente, con las de los tres tipos mencionados de sistemas de primer orden. Se propone al lector la tarea de demostrar que las funciones de transferencia de estos circuitos se corresponden con las presentadas previamente para cada tipo de sistema de primer orden. R2 C vi R1 vo Figura 5.1. Circuito electrónico correspondiente a un sistema de primer orden sin cero. 5–2 R2 R1 C vi vo Figura 5.2. Circuito electrónico correspondiente a un sistema de primer orden con cero nulo o derivador filtrado. R2 C1 C2 vi R1 vo Figura 5.3. Circuito electrónico correspondiente a un sistema de primer orden con cero no nulo. 5.2 Respuesta temporal a un escalón de los sistemas de primer orden En esta sección se va a deducir, usando los procedimientos matemáticos expuestos en los capítulos previos, la respuesta temporal a una entrada en forma de escalón e incluyendo la respuesta libre por condiciones iniciales para cada uno de los sistemas de primer orden presentados en la sección 5.1. Además del interés que este ejercicio tiene como aplicación de la teoría previa, los resultados permiten obtener conclusiones claras sobre las propiedades fundamentales de la respuesta temporal de cada uno de estos sistemas. Conocer estas propiedades agiliza el análisis y diseño de los sistemas de primer orden que aparecen en cualquier aplicación industrial. En todos los casos, se supone que la entrada u(t) sufre un cambio en forma de escalón entre un valor previo u(0-) (condición inicial) y un valor posterior u(0+) (valor inicial) que además coincide con el valor final u (∞) . Además se supondrá que la salida tiene una condición inicial y(0-) y que el objetivo es calcular la evolución de la salida y(t) a partir del instante inicial. En todos los 5–3 casos el procedimiento de cálculo es el expuesto en el capítulo 2. En primer lugar se obtiene la transformada de Laplace Y(s) de la salida, incluyendo respuesta forzada YF(s) y libre YL(s), para posteriormente calcular la antitransformada de Laplace mediante una descomposición en fracciones parciales o simples. 1. Sistema de primer orden sin cero. En este caso, la transformada de Laplace de la salida resulta: F (s ) Y YL (s ) K + u(0 ) y(0 − ) Ku(0 + ) −Ku(0 + ) y(0 − ) Y (s) = τ + = + + 1 s 1 1 1 s s+ s+ s+ s+ τ τ τ τ Y su antitransformada de Laplace: F (t ) L (t ) ⎛ y y ⎞ t t ⎟ ⎜ ⎛ − ⎞ − y(t) = ⎜ Ku(0+ ) ⎜ 1− e τ ⎟ + y(0− )e τ ⎟ γ (t) , ⎜ ⎟ ⎝ ⎠ ⎜⎝ ⎟⎠ que también puede agruparse de la siguiente forma: t − ⎞ ⎛ y(t) = ⎜ Ku(0 + ) + y(0 − ) − Ku(0 + ) e τ ⎟ γ (t) ⎝ ⎠ ( ) La respuesta aparece multiplicada por el escalón unitario γ(t) para indicar que esta expresión sólo es válida a partir de t >= 0. A partir de la expresión anterior, se puede deducir fácilmente, sin más que sustituir t por 0 e ∞ , los valores inicial y final de la respuesta que resultan: y(0 + ) = y(0 − ) y(∞) = Ku(0 + ) = Ku(∞) Ejercicio: se propone al lector comprobar estos valores aplicando los teoremas del valor inicial y final directamente a la transformada de Laplace de la salida o bien, en el caso del valor final, usando el concepto de ganancia estática para un sistema estable. Como conclusiones fundamentales de la respuesta de un sistema de primer orden sin cero a un escalón podemos mencionar: 2. • Posee una respuesta transitoria de tipo exponencial. • El sistema responde sin saltos cuando se introduce un salto en la entrada (condición inicial y valor inicial coinciden). • Su valor final es distinto de 0 si el valor final de la entrada es distinto de 0. Sistema de primer orden con cero nulo o derivador filtrado. En este segundo caso, la transformada de Laplace de la salida resulta: 5–4 F (s ) L (s ) Y Y K K K K − s u(0 + ) y(0 ) − u(0 − ) u(0 + ) y(0 − ) − u(0 − ) τ τ Y (s) = τ + = τ + 1 s 1 1 1 s+ s+ s+ s+ τ τ τ τ Y su antitransformada de Laplace: F (t ) L (t ) ⎛ y y ⎞ t t ⎜K − − ⎟ ⎛ ⎞ K y(t) = ⎜ u(0+ )e τ + ⎜ y(0− ) − u 0− ⎟ e τ ⎟ γ (t) , τ ⎝ ⎠ ⎜τ ⎟ ⎜⎝ ⎟⎠ ( ) que también puede agruparse de la siguiente forma: ( )) ( K ⎛ ⎞ − y(t) = ⎜ y(0 − ) + u(0 + ) − u 0 − ⎟ e τ γ (t) ⎝ ⎠ τ t Los valores inicial y final de la respuesta resultan: y(0 + ) = y(0 − ) + ( K u(0 + ) − u(0 − ) τ ) y(∞) = 0 Como en el caso anterior, estos valores se pueden obtener aplicando los teoremas del valor inicial y final directamente a la transformada de Laplace de la salida o bien, en el caso del valor final, usando el concepto de ganancia estática para un sistema estable. Como conclusiones fundamentales de la respuesta de un sistema de primer orden con cero nulo o derivador filtrado a un escalón podemos mencionar: 3. • La respuesta transitoria es de tipo exponencial. • El sistema responde con un salto en la salida cuando se introduce un salto en la entrada (la relación entre ambos saltos la determina el parámetro K/τ). • Su valor final es nulo independientemente del valor final de la entrada (ganancia estática nula). Sistema de primer orden con cero no nulo. En este último caso, la transformada de Laplace de la salida resulta: F (s ) L (s ) Y Y KT ⎛ 1⎞ KT − y(0 ) − u(0 − ) + ⎜s+ ⎟ τ ⎝ T ⎠ u(0 ) τ Y (s) = + = 1 1 s s+ s+ τ τ ⎛ T⎞ −K ⎜ 1− ⎟ u(0 + ) y(0 − ) − KT u(0 − ) ⎝ τ⎠ Ku(0 + ) τ = + + 1 1 s s+ s+ τ τ 5–5 Y su antitransformada de Laplace: F (t ) L (t ) ⎛ y y ⎞ t t ⎜ − − ⎟ ⎛ ⎞ ⎛ ⎞ T KT y(t) = ⎜ Ku(0+ ) − K ⎜ 1− ⎟ u(0+ )e τ + ⎜ y(0− ) − u(0− )⎟ e τ ⎟ γ (t) τ ⎝ τ⎠ ⎝ ⎠ ⎜ ⎟ ⎜⎝ ⎟⎠ que también puede agruparse de la siguiente forma: t ⎛ KT ⎛ ⎞ − ⎞ y(t) = ⎜ Ku(0 + ) + ⎜ y(0 − ) + u(0 + ) − u(0 − ) − Ku(0 + )⎟ e τ ⎟ γ (t) ⎝ ⎠ τ ⎝ ⎠ ( ) Los valores inicial y final de la respuesta resultan: y(0 + ) = y(0 − ) + ( KT u(0 + ) − u(0 − ) τ ) y(∞) = Ku(0 + ) = Ku(∞) Como en los casos anteriores, estos valores se pueden obtener aplicando los teoremas del valor inicial y final directamente a la transformada de Laplace de la salida o bien, en el caso del valor final, usando el concepto de ganancia estática para un sistema estable. Como conclusiones fundamentales de la respuesta de un sistema de primer orden con cero no nulo a un escalón podemos mencionar: • La respuesta transitoria es de tipo exponencial. • El sistema responde con un salto en la salida cuando se introduce un salto en la entrada (la relación entre ambos saltos la determina el parámetro KT/τ). • Su valor final es distinto de 0 si el valor final de la entrada es distinto de 0. Si se comparan las respuestas temporales de los tres sistemas de primer orden, se puede comprobar que todas ellas responden a una forma general: t − ⎞ ⎛ y(t) = ⎜ y(∞) + y(0 + ) − y(∞) e τ ⎟ γ (t) ⎝ ⎠ ( ) Siendo el valor final de la salida y(∞) = G(0)u(∞) en todos los casos. Por lo tanto, para obtener la respuesta temporal a un escalón, sólo se requiere calcular el valor inicial y final de la respuesta. Este valor inicial se puede obtener teniendo en cuenta que el salto producido en la salida cuando se produce un salto en la entrada viene dado por: ( y(0 + ) − y(0 − ) = G ( ∞ ) u(0 + ) − u(0 − ) ) En la expresión anterior, G(∞) = lim G(s) . Esta relación puede verificarse s→∞ fácilmente para los tres tipos de sistemas de primer orden analizados. Conviene recordar, que en una respuesta de tipo exponencial la salida recorre aproximadamente un 63% del camino total que debe recorrer entre sus 5–6 valores inicial y final en t = τ (la constante de tiempo). La rapidez de la respuesta depende por tanto de esta constante de tiempo: cuanto menor es, mayor es la rapidez. Para medir la rapidez de cualquier sistema se suele usar también el tiempo de establecimiento al 5% definido como el tiempo que la salida tarda en entrar en una banda del ±5% de la distancia entre los valores inicial y final en torno al valor final. Para sistemas de primer orden t s ≈ 3τ . Para t = 5τ la salida recorre un 99,3% del trayecto total. Por último, en los ejemplos 5.1, 5.2 y 5.3 se calculan y representan gráficamente las respuestas de diferentes sistemas de primer orden a un escalón en la entrada entre -2 y 4 con una condición inicial de la salida y(0-) igual a -5. Ejemplo 5.1: Sistema de 1er orden sin cero G ( s) = ( 5 2,5 = s + 2 1 + 0,5s ) y(t ) = 10 − 15e −2t γ (t ) Figura 5.4. Respuesta a un escalón del sistema de primer orden del ejemplo 5.1. Ejemplo 5.2: Sistema de 1er orden con cero nulo o derivador filtrado G( s) = 5s 2,5s = s + 2 1 + 0,5s y(t) = 25e−2tγ (t) Figura 5.5. Respuesta a un escalón del sistema de primer orden del ejemplo 5.2. 5–7 Ejemplo 5.3: Sistema de 1er orden con cero no nulo G( s) = − 2.5s + 5 2,5(1 − 0.5s ) = s+2 1 + 0,5s ( ) y(t ) = 10 − 30e −2t γ (t ) Figura 5.6. Respuesta a un escalón del sistema de primer orden del ejemplo 5.3. 5.3 Respuesta en frecuencia y diagrama de Bode La respuesta en frecuencia es otra forma de caracterizar completamente la relación entrada - salida de un sistema, estudiando cómo responde a señales senoidales en todo el margen de frecuencias. Las técnicas de respuesta en frecuencia son importantes, ya que: • Muchos fenómenos eléctricos y mecánicos son senoidales por naturaleza, por ejemplo las oscilaciones armónicas. • Las señales periódicas pueden descomponerse en suma de señales senoidales mediante el desarrollo en serie de Fourier1. • Las señales senoidales son importantes en telecomunicaciones como señales portadoras de información. • Los sistemas de energía eléctrica funcionan en régimen permanente senoidal. • En la teoría de control hay muchas técnicas de análisis y diseño basadas en la respuesta en frecuencia. Respuesta en Frecuencia La respuesta de un sistema estable G(s) ante una entrada senoidal ha sido estudiada en el capítulo 3. Si se aplica una entrada: u(t ) = U M cos(ωt + ψ) 1 Las señales no periódicas pueden entenderse también como una suma (en este caso integral) de señales senoidales mediante la transformación de Fourier. 5–8 la salida en régimen permanente es: yP (t) = U M G( jω ) cos(ω t + ψ + ∠G( jω )) , donde G( jω ) (la ganancia) es el módulo de G(s) evaluado en s = jω y ∠G( jω ) es la fase del mismo número complejo. Por respuesta en frecuencia de un sistema (fig. 5.7) se entenderá la función G ( jω) = G ( jω) e j∠G ( jω) , que representa la relación entre la salida y la entrada de un sistema en régimen permanente ante una entrada senoidal, para ω = 0 ÷ ∞ . U(s) G(s) u (t ) = U M cos(ωt + ψ ) G(jω) Y(s) = G(s)U(s) yP (t ) = U M G( jω) cos(ωt + ψ + ∠G( jω)) Figura 5.7. Respuesta en frecuencia. Aunque el desarrollo anterior se ha realizado para sistemas estables, también tiene interés la función G(jω) de sistemas inestables. Estos pueden formar parte de otros sistemas, normalmente realimentados, que sí son estables. Representación gráfica de la respuesta en frecuencia En teoría de sistemas se utilizan distintas representaciones gráficas de la respuesta en frecuencia. Como la función G(jω) es compleja, la respuesta en frecuencia puede dibujarse de varias formas. Los tres diagramas más utilizados, son: • El diagrama de Bode. Son dos gráficos. El primero representa la ganancia G( jω ) en función de ω (o de la frecuencia f = ω 2π ). El segundo representa la fase ∠G( jω ) en función de ω. La frecuencia, en ambos gráficos, se representa en escala logarítmica. La ganancia, en el primero de ellos, se suele expresar en decibelios (dB), aunque puede también expresarse en unidades naturales sobre un eje logarítmico. • El diagrama de Nyquist. Es la representación de la parte real y la parte imaginaria de G(jω) en el plano complejo. Puede verse también como un gráfico en coordenadas polares; la distancia al cero es la ganancia y la fase es el ángulo con el eje real. La curva resultante puede ir graduada en frecuencias, pero esta relación es incómoda de manejar y no es necesaria en determinados análisis de tipo cualitativo. • El diagrama de Black. Es la ganancia G( jω ) (en ordenadas) en función de la fase ∠G( jω ) (en abscisas). La ganancia suele expresarse en dB, aunque también puede expresarse en unidades naturales sobre un eje logarítmico. Como en el diagrama de Nyquist, la curva resultante puede ir graduada en frecuencias aunque en ciertos análisis cualitativos esta graduación no es imprescindible. 5–9 Los dos últimos diagramas son especialmente útiles en el análisis y diseño de sistemas realimentados (por ejemplo, sistemas electrónicos de amplificación o sistemas de control) y se estudiarán en asignaturas donde se abordan específicamente este tipo de sistemas, mientras que el primero es de aplicación más general (contiene explícitamente una escala de frecuencias) por lo que el resto del capítulo se centrará exclusivamente en la representación de diagramas de Bode para sistema de primer orden o compuestos por subsistemas de primer orden (polos reales). En el próximo capítulo se abordará el caso de funciones de transferencia con polos complejos. Diagrama de Bode Como se ha mencionado previamente, el diagrama de Bode utiliza una escala logarítmica para la frecuencia y otra para la magnitud, esta última habitualmente expresada en dB (logaritmo decimal de la magnitud multiplicado por 20). Estas decisiones no son por supuesto arbitrarias y se deben a ciertas ventajas que conllevan: • La escala logarítmica en frecuencias permite observar con el mismo nivel de detalle lo que ocurre a frecuencias muy bajas o muy altas a diferencia de lo que ocurre con una escala lineal. • Algo similar ocurre con la escala logarítmica de magnitud ya que permite representar con igual nivel de detalle las zonas de alta y baja ganancia. • Como se verá más adelante, puede trazarse con relativa sencillez una representación aproximada de este diagrama mediante tramos rectos denominada diagrama asintótico de Bode. • La ventaja más importante es la relacionada con la propiedad de que el logaritmo de un producto de varios factores es la suma de los logaritmos de cada uno de los factores. Para comprobar la utilidad de esta propiedad al representar un diagrama de Bode, se considera el caso de una función de transferencia G(s) que se puede expresar como producto de varias funciones de transferencia más simples G1(s), G2(s), …, Gn(s): G(s) = G1 (s)G2 (s)Gn (s) La respuesta en frecuencia será: G1 ( jω ) = G1 ( jω) G2 ( jω ) Gn ( jω ) e j (∠G1 ( jω ) + ∠G2 ( jω ) ++ ∠Gn ( jω ) ) G( jω) = G1 ( jω) G2 ( jω) Gn ( jω) ∠G( jω ) = ∠G1 ( jω ) + ∠G2 ( jω ) + + ∠Gn ( jω ) Si se calcula en dB la magnitud, resulta: G( jω ) dB = 20 log G( jω ) = 20 log(G1 ( jω ) G2 ( jω ) Gn ( jω ) ) = = 20 log G1 ( jω ) + 20 log G2 ( jω ) + + 20 log Gn ( jω ) Es decir: 5–10 G( jω) dB = G1 ( jω) dB + G2 ( jω) dB + + Gn ( jω) dB ∠G( jω ) = ∠G1 ( jω ) + ∠G2 ( jω ) + + ∠Gn ( jω ) Estas dos últimas expresiones demuestran que se puede representar el diagrama de Bode de cualquier función de transferencia descomponiéndola en producto de términos más simples (funciones de trasferencias de primer y segundo orden) y sumando los diagramas de Bode de magnitud y de fase de cada uno de esos términos. En la siguiente sección se representarán los diagramas de Bode de todos los términos, en este caso de primer orden, que pueden aparecer en la factorización de cualquier función de transferencia. La suma de la magnitud y de la fase de la respuesta en frecuencia de estos términos se puede realizar manualmente usando diagramas asintóticos de Bode (aproximación por tramos rectos). 5.4 Diagrama de Bode de un sistema de primer orden sin cero Considérese un sistema de primer orden sin cero: G(s) = 1 1+ τ s con τ > 0 (estable) y con ganancia estática igual a 1. La respuesta en frecuencia de este sistema es: G( jω ) = 1 , 1+ jωτ 1 G( jω ) = 1+ (ωτ )2 ∠G( jω ) = − arctg(ωτ ) , • Para frecuencias muy bajas ( ω → 0 ): G( jω ) → 1 , ∠G( jω ) → 0 . • Para frecuencias ∠G( jω ) → −90º . muy altas ( ω → ∞ ), G( jω ) → 0 , La ganancia en decibelios se calcula como: G( jω ) dB = 20 log10 G( jω ) Para el sistema de primer orden sin cero: G( jω ) dB = 20 log10 1 1+ (ωτ ) 2 = −10 log10 (1+ (ωτ )2 ) Una de las ventajas del diagrama de Bode es que, para funciones de transferencia racionales, puede trazarse fácilmente a partir de las asíntotas. En este caso, para frecuencias bajas ( ω << 1 τ ) se tienen las asíntotas: G( jω) dB = 0, y para frecuencias altas ( ω >> 1 τ ): 5–11 ∠G( jω) = 0 G( jω ) dB = −10 log10 (1+ (ωτ )2 ) ≈ −20 log10 (ωτ ) ∠G( jω ) = −90º El diagrama de Bode de esta respuesta en frecuencia se muestra en la figura 5.8, con frecuencias normalizadas de forma que ω = 1 se corresponde con 1τ. Una década de frecuencias es la distancia que hay entre dos frecuencias relacionada por un factor de 10. Por otra parte, entre dos frecuencias cualesquiera ω 1 y ω 2 hay log10 (ω 2 ω 1 ) décadas. En este caso, la pendiente del diagrama de amplitud para frecuencias altas es, por lo tanto, -20 dB/década. La fase tiene asíntotas en 0º para frecuencias pequeñas y −90º para frecuencias muy altas. En la zona alrededor de ω = 1 τ hay varias posibilidades. Puede emplearse una aproximación consistente en una unión vertical entre las dos asíntotas horizontales en ω = 1 τ . Una aproximación más precisa (como la de la figura 5.8) se consigue uniendo, mediante una recta de −45º/década, las dos asíntotas horizontales desde ω = 1 (10τ ) hasta ω = 10 τ . En cualquiera de los dos casos, hay que tener presente que estas rectas no dejan de ser aproximaciones de la curva real. Frecuencia de corte y rapidez Se llama pulsación de corte ω c de un sistema dinámico con respuesta en frecuencia tipo paso bajo, como la de la figura 5.8, a la pulsación para la que la amplitud, con respecto a la ganancia estática, se ve reducida en 2 . Para el sistema de primer orden sin cero y K = 1: G( jω ) = 1 1+ (ωτ ) 2 1 2 = ωc = 1 τ Nótese que para esta pulsación G( jω ) dB ≈ −3dB . Se llama ancho de banda de un sistema dinámico al intervalo de frecuencias que el sistema deja pasar. Son aquellas frecuencias para las que la ganancia es mayor de −3dB (con respecto a la ganancia estática). En sistemas de primer orden sin cero el ancho de banda va desde 0 a la frecuencia de corte. Nótese también que, usando como parámetro la pulsación de corte, la respuesta en frecuencia puede expresarse como: G( jω ) = 1 1+ j ω ω c En general, la rapidez de la respuesta de un sistema de primer orden sin cero puede ser interpretada en función de su frecuencia de corte. A mayor frecuencia de corte más rápida es la respuesta del sistema. La explicación es inmediata, ya que a mayor ω c = 1 τ (mayor ancho de banda), menor constante de tiempo τ y por lo tanto mayor rapidez de la respuesta temporal. 5–12 Figura 5.8. Diagrama de Bode de un sistema de primer orden sin cero. Las escala de frecuencias está normalizada de forma que ω = 1 corresponde a 1/τ . Ejemplo 5.4: Considérese un sistema de primer orden sin cero: G( s) = 20 2 , = s + 10 1 + s 10 que tiene una ganancia estática 2 y una constante de tiempo 0.1. Su pulsación de corte es 10. Para ω = 0,2 (ω ω c = 0,02) , del diagrama asintótico se obtiene que G( j 0,2) ≈ 2e j 0º , muy 5–13 próximo al valor real G( j 0,2) = 1,9996e− j1,14º . Para ω = 1 (ω ω c = 0,1) , del diagrama asintótico se deduce que G ( j1) ≈ 2e j 0º , G( j1) = 1,9900e− j 5,71º . Para la aproximación es peor, ω = 100 (ω ω c = 10) , del diagrama asintótico se obtiene que G( j100) ≈ 20 log10 2 − 20 log10 10 = −13,98dB , muy próximo al valor real G( j100) = −14,02dB. El error de fase en este punto es también alrededor de 6º. 5.5 Diagramas de Bode de otros sistemas sencillos En la siguiente sección se estudiará el trazado asintótico de diagramas de Bode con polos reales. Está basado en la suma de diagramas de Bode de sistemas elementales. La figura 5.9 muestra, a modo de resumen, una serie de diagramas de Bode (asintóticos, exactos en algunos casos) de estos sistemas elementales. Las consideraciones fundamentales sobre los diagramas de Bode de estos sistemas elementales son las siguientes: • Un sistema estático G(s) = K tiene una ganancia independiente de la frecuencia (20log10|K| dB) y una fase siempre cero o ± 180º si K < 0. Un sistema G(s) = 1 s , G( jω ) = 1 jω , tiene G( jω ) = 1 ω • (−20log10ω dB) y una fase constante –90º. El diagrama de Bode de amplitud es una recta de pendiente –20 dB/década que pasa por 0 dB para ω = 1. Generalizando, un sistema G(s) = 1 s h , G( jω ) = 1 ( jω )h , tiene • • • • G( jω ) = 1 ω h (−20hlog10ω dB) y una fase constante −90º ×h . En el diagrama asintótico de amplitud es una recta de pendiente −20 × h dB/década que pasa por 0dB cuando ω = 1. Si G(s) = s h = 1 s − h , las expresiones anteriores son válidas haciendo h < 0. En este caso, el diagrama de Bode asintótico de amplitud es una recta de pendiente + 20 × h dB/década que pasa por 0dB cuando ω = 1, mientras que la fase es constante e igual a + 90º×h . Un sistema G(s) = 1+ sτ , G( jω ) = 1+ jωτ , sin polos, tiene una respuesta en frecuencia similar a la del sistema de primer orden normalizado 1 (1 + sτ) , como puede comprobarse fácilmente usando las propiedades de los complejos. La ganancia y fase de ambos son de signo contrario. Un sistema G(s) = 1 (1− sτ ) (sistema inestable), tiene una ganancia igual a la de 1 (1+ sτ ) y su fase es de signo contrario. • El sistema G(s) = 1− sτ , tiene una ganancia igual a la de (1+ sτ ) , y su fase es de signo contrario. 5–14 Ganancia Ganancia ω 0 dB 20log10 K dB −20dB/déc ω Fase ω ω 0º 1/τ 0º Fase 10/τ 0,1/ τ −90º G(s) = K , K > 0 G ( s ) =1 (1+ sτ) , τ > 0 Gan ancia Ganancia 0 dB ω= 1 +20dB/déc ω −20hdB/déc 0 dB ω 1/τ ω Fase +90º −90hº Fase G ( s ) =1+ sτ G(s) = 1 s h Ganancia Ganancia 0 dB 1/τ ω 0 dB +20dB/déc −20dB/déc ω Fase ω 0º 1/τ +90º 10/τ 0,1/ τ Fase −90º 0º ω 0,1/ τ G ( s ) =1− sτ 10/τ G( s) = 1 (1− sτ) Figura 5.9. Diagramas asintóticos de Bode de sistemas elementales. 5.6 Trazado de diagramas asintóticos de Bode de sistemas con polos reales En la actualidad existen programas de ordenador que permiten dibujar fácilmente la respuesta en frecuencia de un sistema, por complicado que éste sea. No ha perdido interés, sin embargo, el trazado de bocetos asintóticos de diagramas de Bode. No sólo por la rapidez con que pueden dibujarse con cierta experiencia, sino por la intuición que aporta el conocer el efecto de un polo o un cero. Como se mencionó previamente, la idea fundamental es suponer que el sistema es una conexión serie o producto de sistemas elementales, ya que: G = ∏ Gi i → G dB = ∑ Gi dB , ∠G = ∑ ∠Gi i i Por lo tanto, puede comenzarse por la factorización de la función de transferencia en un producto de funciones de primer orden (funciones de 5–15 transferencia con polos reales), identificar las gráficas correspondientes a cada una de ellas en la tabla de la figura 5.9 y, por último, hacer la suma de las ganancias (en dB) y de las fases. Existen varios procedimientos para sumar los gráficos de ganancia y fase. En el ejemplo 5.5 se ilustra uno de esos procedimientos basado, en este caso, en la identificación de las pulsaciones donde cambia la pendiente en cada gráfico y la acumulación de pendientes Ejemplo 5.5 (Trazado de diagramas asintóticos de Bode). Supóngase un sistema con función de transferencia (polos reales): G( s ) = 100(1 + s 1) 1 1 = 100 × × (1 + s 1) × (1 + s 0,05) (1 + s 20) (1 + s 0,05) (1 + s 20) Como se observa, el primer paso dado consiste en factorizar la función de transferencia de tal forma que todos los términos que aparezcan sean elementales (términos en la tabla de la figura 5.9). En este caso, el sistema tiene ganancia estática 100 y tres pulsaciones donde cambia la pendiente del gráfico de ganancia: 0,05, 1 y 20. Los cambios de pendiente en el gráfico de fase serán en pulsaciones correspondientes a una décima parte y diez veces las pulsaciones anteriores, es decir: 0,005, 0,5, 0,1, 10, 2 y 200. Estas pulsaciones se ordenan de menor a mayor en dos tablas, una para el gráfico de ganancia (tabla 5.1) y otra para el gráfico de fase (tabla 5.2), que servirán para determinar las pendientes en cada tramo. La segunda columna de estas tablas contiene los cambios de pendiente que se producen en cada pulsación, según el diagrama de Bode asintótico del término elemental asociado a esa pulsación. En la tercera columna se van acumulando los cambios de pendiente para determinar las pendientes finales de cada tramo. ω Δp (dB/dec) pt (dB/dec) 0 0 0 0,05 -20 -20 1 +20 0 20 -20 -20 Tabla 5.1: Incrementos de pendiente y pendientes finales para el diagrama de Bode asintótico de ganancia. 5–16 ω Δp (º/dec) pt (º/dec) 0 0 0 0,005 -45 -45 0,1 +45 0 0,5 +45 +45 2 -45 0 10 -45 -45 200 +45 0 Tabla 5.2: Incrementos de pendiente y pendientes finales para el diagrama de Bode asintótico de fase. Para poder dibujar ambos gráficos, se requiere calcular la ordenada absoluta en algún punto. En el caso del gráfico de ganancia, es suficiente con la ganancia estática 20log10(100) = 40dB. Si la función de transferencia contiene ceros nulos o polos nulos (términos s o 1/s), el gráfico empezará con pendiente no nula, ya sea positiva (ceros nulos) o negativa (polos nulos). En este caso la ganancia estática en dB no es finita y para fijar el gráfico de ganancia verticalmente hay que asignar un valor de K en dB a ω = 1 sobre la pendiente inicial (este punto no pertenecerá al gráfico si hay un cambio de pendiente antes de ω = 1). A partir de este punto inicial es sencillo calcular cualquier punto del gráfico mediante consideraciones geométricas. Para fijar verticalmente el gráfico de fase es suficiente con calcular las fases inicial o final acumulando los valores iniciales o finales de todos los términos elementales que aparecen en la función de transferencia. En este ejemplo, la fase inicial valdría 0º y la fase final sería -90º. Con esta información ya es posible dibujar el diagrama asintótico de Bode, tanto el gráfico de ganancia como el de fase, sin más que trasladar las pendientes finales de las tablas a cada tramo del gráfico y fijar las curvas verticalmente con la información obtenida. Los gráficos de ganancia y fase finales se muestran en las figuras 5.10 y 5.11. En estas mismas figuras se han dibujado el diagrama de ganancia real. Nótese cómo las mayores diferencias están alrededor de las frecuencias donde cambia la pendiente. 5–17 Figura 5.10. Trazado asintótico de diagramas de Bode: Ganancia Figura 5.11. Trazado asintótico de diagramas de Bode: Fase. 5–18