Matemáticas Juridico
Anuncio

DELTA – MASTER
FORMACIÓN UNIVERSTARIA
C/ Gral. Ampudia, 16
Teléf.: 91 533 38 42 - 91 535 19 32
28003 MADRID
FORMULARIO DE MATEMÁTICAS:
ESPACIOS VECTORIALES
Sea un conjunto V, y dos operaciones: una ley de composición interna, que llamaremos “suma”
(V,+), y una ley de composición externa, que diremos “producto por un escalar” (V, .K).
Diremos que (V, +, .K) posee estructura de Espacio Vectorial cuando:
(V, +) es un Grupo Abeliano, es decir, cumple:
Asociativa: ∀u , v , w ∈V ⇒ (u + v ) + w = u + (v + w )
Conmutativa: ∀u , v ∈V ⇒ u + v = v + u
Elemento Neutro: ∃n ∈ V / ∀u ∈ V ⇒ u + n = u
Elemento Opuesto: ∀u ∈V , ∃u ' / u + u ' = n
(V, .K) el una Ley de Composición Interna, es decir: si u ∈V , α ∈ K ⇒ α .u ∈V y cumple:
Si
α, β ∈ K,
u , v ∈V
α .(u + v ) = α .u + α .v
(α + β ).u = α .u + β .u
(αβ ).u = α .( β .u )
∃1∈ K/ 1.u = u
Cualquiera de los elementos del espacio vectorial, se le denomina vector.
Combinación lineal: Se denomina así a cualquier operación entre escalares y vectores de la forma:
α 1u1 + α 2 u 2 + ....... + α n u n ∈V
Dependencia lineal: Se dice que {u1 , u 2 ,......, u n } es un conjunto linealmente dependiente, si puede
hacerse α 1u1 + α 2 u 2 + ....... + α n u n = n , siendo al menos un escalar α i ≠ 0 .
También puede decirse que algún vector del conjunto puede ser expresado como combinación
lineal de los demás.
Independencia lineal: Se dice que {u1 , u 2 ,......, u n } es un conjunto linealmente independiente, si
para que α 1u1 + α 2 u 2 + ....... + α n u n = n , es necesario que α i = 0, ∀i.
Igualmente podremos decir que ninguno de los vectores del conjunto puede ser expresado
mediante combinación lineal de los demás.
1
DELTA – MASTER
FORMACIÓN UNIVERSTARIA
C/ Gral. Ampudia, 16
Teléf.: 91 533 38 42 - 91 535 19 32
28003 MADRID
Sistema Generador: Se dice que un conjunto de vectores {u1 , u 2 ,......, u m } forma un S.G. del espacio
vectorial V, si:
∀u ∈V
∃α 1 , α 2 ,..., α m ∈ K /
α 1u1 + α 2 u 2 + ....... + α m u m = u
Base de un espacio vectorial: Un conjunto
vectorial V, cuando:
{u1 , u 2 ,......, u n }
se dice que forma base de un espacio
a) Es linealmente independiente.
b) Forma Sistema Generador de V.
Dimensión de un espacio vectorial: Es el número de vectores que forma la base de V.
Coordenadas de un vector respecto de una base: Se dice coordenadas de u ∈ V respecto de la
base
B = {u1 , u 2 ,......, u n } al conjunto de escalares
α 1 , α 2 ,..., α n ∈ K /
α 1u1 + α 2 u 2 + ....... + α n u n = u . Y se escribe de la forma: u = (α 1 , α 2 ,..., α n ) B
En consecuencia:
a) El número de coordenadas de un vector coincide con la dimensión del espacio vectorial.
b)
El máximo número de vectores linealmente independientes en un espacio vectorial
coincide con la dimensión de éste.
c) En un espacio vectorial de dimensión “n”, si tenemos n vectores linealmente
independiente, automáticamente forman base en dicho espacio.
Cambio de base: Las coordenadas de un vector dependen de la base respecto de la cuál venga
expresado, con lo que podemos tener varios conjuntos de coordenadas.
Dadas
dos bases en un mismo espacio vectorial:
B = {u1 , u 2 ,......, u n } y
B' = {u1 ' , u 2 ' ,......, u n '}. Podremos expresar:
u = (α 1 , α 2 ,..., α n ) B = (α 1 ' , α 2 ' ,..., α n ' ) B '
Siempre que se cumpla:
α 1u1 + α 2 u 2 + ....... + α n u n = α 1 ' u1 '+α 2 ' u 2 '+....... + α n ' u n '
Al conjunto de ecuaciones que relaciona las coordenadas de los vectores en las dos bases dadas se les
denomina ecuaciones del cambio de base, y escribiendo éstas en forma matricial dan lugar a las
matrices de cambio de base, tanto de B a B’, como de B’ a B.
A partir de
( B)u B = ( B' )u B ' obtenemos
u B = ( M B '→ B )u B '
o bien
( M B → B ' )u B = u B '
2
DELTA – MASTER
FORMACIÓN UNIVERSTARIA
C/ Gral. Ampudia, 16
Teléf.: 91 533 38 42 - 91 535 19 32
28003 MADRID
EJERCICIO 1º :
Sean
de R4.
{ uv , ur
1
2
}= {(1,0,−1,0), (1,−1,1,0), (1,−1,1,−1), (1,1,1,1) }∈ R 4 ; demostrar que forman base
r r
,u3,u4
r r r r
Para que {u 1 , u 2 , u 3 , u 4 } forme base de ℜ 4 , es necesario que sean linealmente independientes y que
forme sistema generador . Ambas condiciones se cumplen, simultáneamente, si tenemos cuatro
vectores linealmente independientes en ℜ 4 .
Estudiamos por determinantes:
1
1
1
0 −1 −1
−1 1
1
0
0 −1
1
F3 + F1
1
=
1
1
1 1 1
0 -1 -1
0 2 2
0 0 1
1
-1 -1 1
1
= 1 2 2 2 = -4≠0
2
0 -1 1
1
Al ser el determinante distinto de cero podemos asegurar que son linealmente indepedientes y por
lo tanto forman base de ℜ 4
EJERCICIO 2º: Dada f ( x, y, z ) = ( x − 2 y − z ,2 x − y + z ,−5 x + y − 4 z ,3 y + 3 z ) . Se pide:
a) Estudiar si es o no una aplicación lineal.
b) Calcular el núcleo y la imagen dando una base y la dimensión de cada uno.
c) Clasifica la aplicación.
f:
a)
1.
ℜ3 → ℜ4
( x, y, z ) → ( x − 2 y − z ,2 x − y + z ,−5 x + y − 4 z ,3 y + 3z )
1.f(u + v) = f(u) + f(u)
f es aplicación lineal ⇔
2.f(αu) = αf(u)
f (u + v ) = f ( x + x' , y + y ' , z + z ' ) =
( x + x'−2 y − 2 y '− z − z ' ,2 x + 2 x'− y − y '+ z + z ' ,−5 x − 5 x'+ y + y '−4 z − 4 z ' ;3 y + 3 y '+3z + 3 z ' ) =
= f ( x, y , z ) + f ( x ' , y ' , z ' )
2.
f (αu ) = f (αx, αy, αz ) = (αx − 2αy − αz ,2αx − αy + αz ,−5αx + αy + 4αz ,3αy + 3αz ) =
= αf ( x, y, z )
Con esto queda demostrado que f es aplicación lineal u homomorfismo.
3
DELTA – MASTER
FORMACIÓN UNIVERSTARIA
C/ Gral. Ampudia, 16
Teléf.: 91 533 38 42 - 91 535 19 32
28003 MADRID
b)
Calculamos en primer lugar el núcleo de f:
(x,yz) ∈ Ker f ⇔ f(x, y, z) = (0,0,0,0)
x - 2y - z = 0
2x - y + z = 0
Tenemos las ecuaciones
de las cuales sólo dos son independientes.
- 5x + y - 4z = 0
3y + 3z = 0
x − 2 y − z = 0
son las ecs. inplícitas del ker f
2
x
y
z
0
−
+
=
dim (ker f)= dim ℜ 3 -nº de ecs implícitas = 3-2= 1
y la base se obtiene a través de las ecuaciones paramétricas.
(x,y,z) = ( α , α ,−α ) = α (1,1,−1)
Base de ker f = {(1,1,−1)}
En segundo lugar obtenemos la Imagen de f. Para ello obtenemos las imágenes de los vectores
de la base canónica de ℜ 3 , y estos formarán un sistema generador de Im f, y de ahí extraemos
una base de Im f , eliminando los vectores linealmente independientes.
f(1,0,0) = (1,2,-5,0)
f(0,1,0) = (-2,-1,1,3)
f(0,0,1) = (-1,1,-4,3)
El Sistema Generador de Im f: {(1,2,−5,0), (−2,−1,1,3), (−1,1,−4,3)}, de los que sólo los dos
primeros son linealmente independientes.
Base de Im f : {(1,2,−5,0), (−2,−1,1,3)}
Dim(Im f) = 2
c) Al ser dim(Ker f) = 1 ≠ 0, entonces f no es Inyectiva.
Y al ser dim(Im f) = 2 ≠ dim ℜ 4 = 4, tampoco es Sobreyectiva.
EJERCICIO 3º: Sea f una aplicación lineal cuya matriz es A.
a) Obtener los autovalores y autovectores.
b) Indicar si es o no diagonalizable, y en caso afirmativo obtener la correspondiente matriz
diagonal así como la matriz del cambio de base.
c) Calcular la matriz de la aplicación f 4.
4
DELTA – MASTER
FORMACIÓN UNIVERSTARIA
C/ Gral. Ampudia, 16
Teléf.: 91 533 38 42 - 91 535 19 32
28003 MADRID
2 −1 1
A= 0 3 − 4
0 2 − 3
a) Para obtener los autovalores de f, utilizamos el polinomio característico.
A − λI =0, esto dá:
2 − λ −1
0
3−λ
0
2
1
−4
= (2 - λ ) [(3 - λ )(-3 - λ ) + 8] = 0
−3−λ
λ1 = 2
(2 − λ )(λ 2 − 1) = 0 → λ =2 = 1 tres autovectores simples
λ = −1
3
Sabemos que f es diagonalizable, por tener todos sus autovalores simples. Pero debemos calcular los
autovectores resolviendo para cada valor ( A − λI )v = 0
λ1 = 2 → ¿ v1 ?
1 - 1 1 x 0
( A − λ , I )v1 = 0 ⇒ 0 1 − 4 y = 0
0 2 − 5 z 0
Resolviendo : (x,y,z) = (λ ,0,0) = λ (1,0,0)
V1= lin {(1,0,0)}
λ2 = 1 → ¿ v2 ?
1 − 1 1 x 0
( A − λ 2 I )v 2 = 0 ⇒ 0 2 − 4 y = 0
0 2 − 4 z 0
Resolviendo: (x,y,z) = β ,2 β , β ) = (1,2,1)
V2 = lin {(1,2,1)}
λ 3 = −1 → ¿ v 3 ?
5
DELTA – MASTER
FORMACIÓN UNIVERSTARIA
C/ Gral. Ampudia, 16
Teléf.: 91 533 38 42 - 91 535 19 32
28003 MADRID
3 − 1 1 x 0
( A − λ 3 I )v 3 = 0 ⇒ 0 4 − 4 y = 0
0 2 − 2 z 0
Resolviendo: ( x, y, z ) = (0, λ , λ ) = λ (0,1,1)
V3 = lin {(0,1,1)}
b) Si formamos una base de autovectores B: {(1,0,0), (0,1,1)}; y referimos la matriz de la aplicación
a dicha base, utilizando la matriz de cambio P:
1 1 0
P= 0 2 1
0 1 1
Resultará:
2 0 0
D = P AP = 0 1 0
0 0 − 1
-1
c) f 4 = f o f o f o f
La matriz de la composición se obtiene multiplicando las matrices, entonces:
Af4 = A ⋅ A ⋅ A ⋅ A = A4
Si referimos la aplicación a la base de autovectores resultará:
24 0
D 4 = 0 14
0 0
0 16 0 0
0 = 0 1 0
(−1) 4 0 0 1
Si queremos escribirla en base canónica, mediante la matriz de paso y su inversa previamente
calculada:
1 1 0 16 0 0 1 − 1 1
A = P D P = 0 2 1 0 1 0 0 1 − 1
0 1 1 0 0 1 0 −1 2
4
4
-1
6
DELTA – MASTER
FORMACIÓN UNIVERSTARIA
C/ Gral. Ampudia, 16
Teléf.: 91 533 38 42 - 91 535 19 32
28003 MADRID
16 − 15 15
A =0
1
0
0
0
1
4
r
ERCICIO 4º: Sea f: ℜ 3 → ℜ 3 , una aplicación lineal, tal que para cualquier vector v del
r
r
subespacio U1 = {(x, y, z)/x − 2y + z = 0}, f(v) = v ; y tal que f(1,0,0) = (-1,0,0). Se pide:
a)
b)
c)
Autovalores y autovectores de f.
Matriz de la aplicación f asociada la base canónica de ℜ 3
Núcleo e Imagen de f.
a) U1 = {(x, y, z, t)/x − 2 y + z = 0}lin {(1,0,-1), (0,1,2)}
Como f(1,0,-1) = (1,0,-1) y f(0,1,2) = (0,1,2), tenemos dos autovectores de f y sus autovalores
asociados serían en ambos casos λ = 1, ( que al menos ha de ser doble).Además si f(1,0,0) =
(-1,0,0) otro autovector de f será (1,0,0) y su autovalor asociado λ = -1.
Tenemos pues tres autovectores linealmente independientes y con ello podemos formar una base
de ℜ 3, con lo que f es diagonalizable.
b) La representación matricial de
{(1,0,0), (1,0,−1), (10,1,2)} será
−1
D= 0
0
f referida a la base de autovectores elegida:
0 0
1 0
0 1
Mientras que la matriz del cambio de base a canónica será:
1 1 0
P = 0 0 1
0 − 1 2
Y su inversa, que podemos obtener mediante el método de Gauss:
− 1 4 − 2
-1
P =0 1 0
0 0 1
Con lo que la matriz de la aplicación referida a la base canónica será:
7
DELTA – MASTER
FORMACIÓN UNIVERSTARIA
C/ Gral. Ampudia, 16
Teléf.: 91 533 38 42 - 91 535 19 32
28003 MADRID
1 1 0 -1
A = PDP = 0 0 1 0
0 − 1 2 0
−1 4
A= 0 1
0 0
-1
0 0 - 1 4 - 2
1 0 0 1 0
0 1 0 0 1
− 2
0
1
c) Al ser rg (A) = 3, tendremos: din Ker f = dim ℜ 3 - rg (A) = 3 – 3 = 0; con lo que:
Ker f = {0} y f será Inyectiva.
Además, dim(Im f) = rg (A) = 3 = dim ℜ 3 , con lo que:
Im f = ℜ 3 , y f será Sobreyectiva
Con todo f es una aplicación Biyectiva.
r
EJERCICIO 5º Sean los subespacios vectoriales S .{u = ( x, y, z ) / − x + 3 y + 2 z = 0} y
r
T = {u = ( x, y, z ) / x + y − z = 0} Se pide:
a) Demostrar que los vectores (2,0,1), (1,-1,2) y (1,1,-1) forman un sistema generador de S.
b) Calcular las dimensiones de ambos subespacios vectoriales así como la de su intersección
c) Obtener una base de S, otra de T y otra de su intersección.
d) Estudiar si el vector (-1, -5, -7) pertenece a S a T o a su intersección.
r
S .{u = ( x, y, z ) / − x + 3 y + 2 z = 0}⇒ dim S = dim ℜ 3 − n ª ecs. indep = 3 − 1 = 2
r
T = {u = ( x, y, z ) / x + y − z = 0}⇒ dim T = dim ℜ 3 − n ª ecs. indp = 3 - 1 = 2
a) dim S = 2, para ser generado basta tomar dos vectores de S linealmente independientes.
r
a 1 = (2,0,1) ∈ S , ya que (-2 + 0 + 2 = 0) verifica la ec. de S
r
a 2 = (1,−1,2) ∈ S , ya que (-1 - 3 + 4 = 0), verifica la ec. de S
r
a 3 = (1,1,−1) ∈ S ; ya que (-1 + 3 - 2 = 0) verifica la ec. de S.
Comprobamos que hay dos vectores linealmente independientes:
1
2 1
1
2 1
2 1
rg 0 − 1 1 = 2;
= 2 ≠ 0; 0 − 1 1 = 0
0
−
1
1 2 − 1
1 2 −1
r r r
Por lo tanto {a1 , a 2 , a3 }forma un sistema generador de S.
b) dim S =1 ; dim T = 1;
ya están calculados.
8
DELTA – MASTER
FORMACIÓN UNIVERSTARIA
C/ Gral. Ampudia, 16
Teléf.: 91 533 38 42 - 91 535 19 32
28003 MADRID
Calcularemos por último S ∩ T
r
u ∈ S ⇔ − x + 3 y + 2 z = 0
r
u = ( x, y , z ) ∈ S ∩ T ⇔ r
u ∈T ⇔ x + y − z = 0
Las ecuaciones implícitas de S ∩ T , serán por lo tanto:
− x + 3 y + 2 z = 0
S ∩T :
son linealmente independientes
x+ y−z=0
dim ( S ∩ T ) = dim ℜ 3 − n ª ecs.indp = 3 − 2 = 1 dim (S ∩ T) = 1
c) Obtengamos bases:
En el caso de S, basta elegir dos vectores linealmente independientes del apartado (a):
Base de S: {(2,0,1); (1,−1,2)}
Para el caso de T, resolvemos a partir de la ec. Implícita:
x =α
∀α , β ∈ ℜ
x+y-z=0 ⇒ y = β
z = α + β
Base de T: {(1,0,1), (0,1,1}
Para el caso de S ∩ T; hacemos igual :
5
x = 4γ
x + 3 y + 2z = 0
−1
γ
∀γ ∈ ℜ
y =
4
x+ y−z=0
z =γ
Base de S ∩ T = {5,−1,4)}
r
d) x =(-1,-5,7) Comprobaremos las ecuaciones implícitas de este subespacio:
Para S: -x+3y+2z=0 → −(−1) + 3(−5) + 2.7 = 1 − 15 + 14 = 0
r
Se verifica ⇒ x ∈ S
Para T : x+y-z = 0 → (−1) + (−5) − 7 = −13 ≠ 0
r
No la verifica ⇒ x ∉ T
r
r
Como x ∉ T , no puede tampoco estar en S ∩ T ⇒ x ∉ S ∩ T
La base elegida en S : Bs {(2,0,1); (1,−1,2)}
9
DELTA – MASTER
FORMACIÓN UNIVERSTARIA
C/ Gral. Ampudia, 16
Teléf.: 91 533 38 42 - 91 535 19 32
28003 MADRID
r
x = (−1,−5,7) = α (2,0,1) + β (1,−1,2)
2α + β = −1
− β = −5
α + 2β = 7
⇒ α = -3; β = 5
s
con lo que x = (−3,5) BS
EJERCICIO 6º Dada La siguiente aplicación obtener su núcleo y su imagen, dando una base y la
dimensión de cada uno.
f = ℜ3 → ℜ3
( x, y, z ) → (− x + 2 y + z;−2 x + 4 y + 2 z; x − 2 y − 2 z )
la matriz de la aplicación:
x1 = − x + 2 y + z x1 − 1 2
1 x
1
1
2 y
y = −2 x + 4 y + 2 z ⇒ y = − 2 4
z 1 = x − 2 y − 2 z z 1 1 − 2 − 2 z
1
−1 2
A = − 2 4
2 ; rg (A) = 2
1 − 2 − 2
a) Im f: calculamos un sistema generador del subespacio, a partir de las imágenes de la base
canónica de ℜ 3
f (1,0,0) = (−1,−2,1)
f (0,1,0) = (2,4,−2) S.G. de Im f = {(1,-2,1), (2,4,-2), (1,2,-2)}
f (0,0,1) = (1,2,−2)
como rg(A) = 2 ⇒ sólo dos son linealmente independientes
Base de Im f = {(1,−2,1), (1,2,−2)}
Ker f: calculamos unas ecuaciones implícitas de este subespacio
− x + 2y + z = 0
(x,y,z) ∈ Kerf ⇔ f ( x, y, z ) = (0,0,0) ⇒ − 2 x + 4 y + 2 z = 0
x − 2 y − 2z = 0
eliminando las l.d.
10
DELTA – MASTER
FORMACIÓN UNIVERSTARIA
C/ Gral. Ampudia, 16
Teléf.: 91 533 38 42 - 91 535 19 32
28003 MADRID
− x + 2 y + z = 0
ecs.Ker f:
x − 2 y − 2z = 0
x = 2α
y = α ; ∀α ∈ ℜ
z=0
Base de Ker f: {(2,1,0)}
b) dim (Im f) = rg (A) = 2
dim (Kerf)=dim( ℜ 3 )-rg(A) = 3-2 = 1
Base de Im f = {(1,−2,1), (1,2,−2)}
Que ya estaba calculada en el apartado anterior.
1 − 2 2 − 1
;
y dim (Inf) = 2
Base de Im f =
2 3 − 2 9
EJERCICIO 8º Calcular los autovalores y los autovectores de la siguiente matriz, indicando si es
diagonalizable, dando en caso afirmativo la matriz diagonal y la matriz de paso.
− 2 1 2
A= − 2 1 2
− 2 1 2
a) Polinomio característico: A − λI = 0
−2−λ
−2
−2
1
1− λ
2−λ
2
2
2−λ
k1 + k 3
−λ 1
= 0 λ
λ 1
2
2
2−λ
f1 + f 3
0
2
= 0 1− λ
λ
1
4−λ
2
2 = λ.
1− λ
2−λ
4−λ
=0
2
λ [4 − (4 − λ )(1 − λ )] = λ (5λ − λ 2 ) = λ 2 (5 − λ ) = 0
el polinomio característico será: λ 2 (5 − λ )
λ1 = 5
b) λ 2 (5 − λ ) = 0 ⇒
seran los autovalores de A.
λ 2 = 0 (doble)
Obtenemos los autovectores de A:
λ1 = 5 (simple) ⇒ (A - 5I)v = 0
2 a 0 − 7a + b + 2c = 0 a = α
− 7 1
− 2 − 4 2 b = 0 ⇒ − 2a − 4b + 2c = 0 ⇒ b = ∂
− 2 1 − 3 c 0 − 2a + b − 3c = 0 c = 3∂
{
}
V1 = lin 1 + x + 3 x 2 ; dim V1 = 1 = multiplicidad de λ1
λ 2 = 0 (doble) ⇒ (A - 0.I)v = 0
11
DELTA – MASTER
FORMACIÓN UNIVERSTARIA
C/ Gral. Ampudia, 16
Teléf.: 91 533 38 42 - 91 535 19 32
28003 MADRID
− 2 1 2 a 0 − 2a + b + 2c = 0 a = λ
− 2 1 2 b = 0 ⇒ − 2a + b + 2c = 0 ⇒ b = 2λ − 2 β
− 2 1 2 c 0 − 2a + b + 2c = 0 c = β
{
}
dim V2 = 2 multiplicidad de λ 2
V2 = lin 1 + ax ; - 2x + x 2 ;
Al coincidir las dimensiones de los subespacios de autovectores con la multiplicidad algebraica de
los autovalores asociados, podemos asegurar que A es diagonalizable.
c) Si escribimos la matriz de la aplicación referida a una base de autovectores , la matriz quea
diagonal.
Base de autovectores : 1 + x + 3 x 2 ;1 + 2 x;−2 x + x 2
{
}
La matriz P del cambio de base quedaría:
1 1 0
P= 1 2 − 2
3 0 1
Calculamos la inversa de P , mediante el método de Gauss:
f1 − f 1
f +3 f
0
1 0 0 3 2
1 0 0
1 1 0 1 0 0
1 1
1 1 0
f 3 − 3 f1
→ 0 1 − 2 − 1 1 0
→ 0 1 − 2 −1 1 0
1 2 − 2 0 1 0
3 0 1 0 0 1
0 − 3 1
0 0 − 5 − 6 3 1
0 0 1
→ 5 f 2 − 2 f3
0
0 5 0 0 − 2
1 1 0 1
7
0 5 0 7 −1 − 2 → 0 5 0
0 0 0 − 6 3
1 0 0 − 5 − 6
− 2 1
1
P = 7 −1
5
6 −3
-1
Y sabemos que :
1 0 0
1
2
− 1 − 2 → 0 1 0
3
1
0 0 1
2
− 2
− 1
−2
5
7
5
6
5
1
5
−1
5
−3
5
2
5
− 2
5
−1
5
2 − 2 1 2 1 1 0 5 0 0
− 2 1
1
P .A .P = 7 − 1 − 2 − 2 1 2 1 2 − 2 = 0 0 0 = D
5
6 − 3 − 1 − 2 1 2 3 0 1 0 0 0
-1
12
DELTA – MASTER
FORMACIÓN UNIVERSTARIA
C/ Gral. Ampudia, 16
Teléf.: 91 533 38 42 - 91 535 19 32
28003 MADRID
CAMPOS DE DEFINICIÓN DE FUNCIONES REALES:
-
Sumas ,restas, productos, potencias, exponenciales, siempre definidos.
Senu, cosu, shu, chu, definidas ∀u ∈ ℜ
Corientes, definidas cuando el denominador ≠ 0.
índice impar : n u , definida ∀u ∈ ℜ
Raices
índice par : n u , definida si u ≥ 0
log b u, definidos sí u > 0
sen(u )
cos(u )
1
1
cosec(u) =
; sec(u ) =
; tg (u ) =
; cot g (u ) =
sen(u)
cos(u )
cos(u )
sen(u )
definidos cuando el denominador ≠ 0
sen(u ) = 0 ⇔ u = 0 + π .k
Nota:
con k entero
π
π
cos(
u
)
=
0
⇔
u
=
+
.
k
2
− arctgu; definidos si - 1 ≤ u ≤ 1
- arctg u ; definida ∀u ∈ ℜ
- argsh u ; definida ∀u ∈ ℜ
- argch u ; definida si u ≥ 1
- argth u ; definida si - 1 < u < 1
13
DELTA – MASTER
FORMACIÓN UNIVERSTARIA
C/ Gral. Ampudia, 16
Teléf.: 91 533 38 42 - 91 535 19 32
28003 MADRID
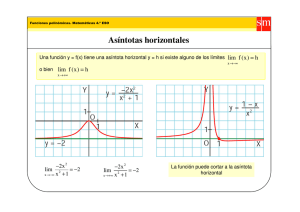
LIMITE DE UNA FUNCIÓN.
Es el valor al que se van aproximando las imágines de dicha función, a medida que los origenes se
acercan a un valor dado.
Podemos escribir lim f ( x ) , lim f ( x ) , y lim− f ( x ) , , siendo necesario en este último caso que coincida el
x →∞
x→∞
x → x0
límite lateral izquierdo, lim− f ( x ) , (con valores x < x0 ), con el límite lateral derecho, lim− f ( x ) , (con
x → x0
x → x0
valores x > x0).
Para calcular el límite de una función en forma explícita hay que tener en cuenta:
A. Si la función viene definida por intervalos, y calculamos el límite cuando x tiende a un punto
de ruptura de la definición, haremos los laterales y los comparamos.
B. En otro caso, el valor al que tiende x, en la función dada, y pueden darse varias situaciones:
a) Si da un número, se acabó.
a
b) Si en algun lugar aparece → ±∞ ,tendremos que estudiar los laterales.
0
0 ∞
c) Si surge una indeterminación , , ∞ − ∞,0.∞,1∞ ,0 0 , ∞ 0 hay que resolverla, y esto
0 ∞
depende de cómo esté definida la función.
Resolución de indeterminaciones:
0
0 .
•
•
•
Cocientes de polinomios ⇒ Descomponer en factores y simplificar.
Cocientes con ráices ⇒ Multiplicar y dividir por el conjugado.
Otras cosas (hay dos métodos):
-
∞
∞
•
•
Regla de L `Hôpital : lim
f ( x)
= lim
f ( x)
g ( x ) x →a g ``( x )
Infinitésimos equivalentes (según tabla).
x →a
.
Igual que con sucesiones.
Regla de L Hôpita l..
[∞ − ∞]
•
Igual que con sucesiones.
14
DELTA – MASTER
FORMACIÓN UNIVERSTARIA
C/ Gral. Ampudia, 16
Teléf.: 91 533 38 42 - 91 535 19 32
28003 MADRID
•
1 1
−
g f
También puede hacerse f − g =
⇒ L`Hôpital.
1
f .g
[0.∞]
[1
∞
•
Igual que con sucesiones.
•
También puede escribirse f.g =
g
1
f
⇒ L`Hoˆpital.
]
∞ 0 ,0 0 .
• Igual que con sucesiones.
• lim f g = y ,Tambien puede calcular logaritmos neperianos en ambos miembros.
x→a
Ly = lim f
x→a
g
= lim f
x→a
g
Lf
=b
x→a 1
g
= lim Lfg = lim g.L= lim
x→ a
x→ a
Y luego L y = b < = > y = eb .
Nota: Tabla de infenitésimos equivalentes:
sena ≈ a; arcsena ≈ a
tga ≈ a; arctga ≈ a
a2
a → 0 ⇒ cos a ≈ 1 −
2
e a ≈ 1 + a; In(1 + a ) ≈ a
(1 + a ) p ≈ 1 + pa
Continuidad de una función en un punto:
Se dice que f(x) es continua en x0, si lim f ( x ) = f ( x ) . Esto nos lleva a que para estudiar la continuidad
x → x0
en dicho punto es necesario exigir:
I )∃f ( x0 ) .
II )∃ lim f ( x ) .
x → x0
III )∃ lim f ( x ) = f ( x0 ) .
x → x0
En el caso en que alguna de estas tres condiciones no se cumpla diremos que f(x) no es continua en
x(0), o bien , que presenta una discontinuidad para x = x0.
15
DELTA – MASTER
FORMACIÓN UNIVERSTARIA
C/ Gral. Ampudia, 16
Teléf.: 91 533 38 42 - 91 535 19 32
28003 MADRID
Tipos de discontinuidades: (Se estudia según el límite).
a) Evitable, cuando ∃ lim f ( x ) .
x → x0
b) De salto:
-
finito: Si ∃1− ≠ + finitos.
Infinito: Si 1- o 1+ es infinito.
c) Esencial, cuando ∃1− o1+ .
Continuidad de una función en un intervalo:
Se dice que f(x) es continua en (a,b), si lo es ∀x ∈ (a, b) y además lim+ f ( x ) = f ( a ) y ademas
x →a
lim f ( x ) = f ( a ) y lim− f ( x ) = f (b ) .
x →a +
x →a
Para estudiar la continuidad de forma global, estudiaremos sólo los puntos que queden fuera del
dominio y los de ruptura ebn la definición.
Derivabilidad de una función en un punto:
Se dice que f(x) es derivable en x0 cuando:
a) f(x) es continua en x0.
f ( x + h ) − f ( x0 )
b) ∃ lim 0
= f `( x0 ) .
h→0
h
La derivada mide el ritmo al que varía f(x) cuando aumentamos x, o bien geómetricamente, la
pendiente de la recta tangente a la curva en el punto.
16
DELTA – MASTER
FORMACIÓN UNIVERSTARIA
C/ Gral. Ampudia, 16
Teléf.: 91 533 38 42 - 91 535 19 32
28003 MADRID
TABLA DE DERIVADAS
y = a.f
;
y' = a.f'
y = f.g
f
y=
g
;
y' = f'.g + f.g'
f'.g − f.g'
y' =
g2
;
y=fn
y= f
y' = n.f n −1 .f'
f'
y' =
2 f
;
;
y=n f ;
y' =
y = ef
;
y = af
;
y = Lf
;
y = log b f;
y = senf ;
y = cosf ;
f'
n. f n −1
y' = e f .f'
n
y' = a f .L(a).f'
f'
y' =
f
f'
y' = .log b e
f
y' = cosf.f'
y' = -sen f .f'
f'
cos 2 f
− f'
y = cotgf ;
y' = -(1 + cotg 2 f).f' =
sen 2 f
y = shf
; y' = chf.f'
y = chf
; y' = shf.f'
f'
y = thf
; y' = 2
ch f
- f'
y = cothf ;
y' = 2
sh f
f'
y = arcsenf; y' =
1− f 2
y = tgf
;
y' = (1 + tg 2 f).f' =
17
DELTA – MASTER
FORMACIÓN UNIVERSTARIA
C/ Gral. Ampudia, 16
Teléf.: 91 533 38 42 - 91 535 19 32
28003 MADRID
y = arccosf;
y = arctgf;
y = argshf;
y = argchf;
y = argthf;
y' =
− f'
1− f 2
f'
y' =
1+ f 2
f'
y' =
f 2 +1
f'
y' =
f 2 −1
f'
y' =
1− f 2
FUNCIONES DE VARIAS VARIABLES
LIMITE DE UNA FUNCIÓN EN UN PUNTO.
Sea f : ℜ n → ℜ m
Diremos que lim f ( x ) = L
x →a
LIMITES ITERADOS DE UNA FUNCIÓN EN UN PUNTO.
Dada z = f(x,y) se llaman límites iterados de f en el punto (x0,y0) a:
lim lim f ( x, y ) = 11
x → x0 y → y 0
lim lim f ( x, y ) = 12
y → y 0 x → x0
Es condición necesaria para la existencia de límite de una función un punto, el que los límites
reiterados existan y sean iguales.
Dada la función y = f (x ), se define el límite de “ f “ en el punto a según la dirección del vector
v como:
lim f (a + λv )
α →0
En resumen se puede afirmar que es condición necesaria para la existencia de limite de una función
en un punto el que todos los límites direccionales existan y sean iguales en dicho punto.
Limites en polares:
lim
( x , y ) → ( x 0, y 0 )
f ( x, y ) = lim f (r , θ )
r →0
x = x 0 + r. cos θ
con
y = y 0 + r.senθ
El límite no puede depender de θ . Debe ser único
18
DELTA – MASTER
FORMACIÓN UNIVERSTARIA
C/ Gral. Ampudia, 16
Teléf.: 91 533 38 42 - 91 535 19 32
28003 MADRID
CONTINUIDAD DE UNA FUNCIÓN EN UN PUNTO.
Sea f : x → R m , x ⊂ R n , se dice que f es continua en el punto a ∈ R si :
1º ) ∃f(a)
2º )∃ lim f ( x )
x →a
3º ) lim f ( x ) = f (a )
x →a
DERIVADA SEGÚN UN VECTOR.
Sea f : x → R m , x ⊂ R n abierto.
Se define la derivada de f en el punto a ∈ x segun el vector v ∈ R n
f ( a + λv ) − f ( a )
D v f (a ) = lim
λ →0
λ
DERIVADA SEGÚN LA DIRECCIÓN DE UN VECTOR. (DERIVADA DIRECCIONAL).
Sea f : x → R m , x ⊂ R n abierto.
Se define la derivada direccional de f en el punto a ∈ x como la derivada en el punto a
v
según el vector de módulo uno
v
v
− f (a )
f a +λ
v
λ
λ →0
D v f (a ) = lim
v
DERIVADAS PARCIALES.
Sea f : x → R m , x ⊂ R n abierto
Sea el vector e i = (0,0,......,1,......,0)paralelo al eje x i .
Se denomina derivada parcial de f en el punto a y se simboliza por D i f (a ) o por
∂f
(a ) a la derivada de f en
∂x i
punto a según el vector e i .
Di f ( a ) =
f ( a + λe i ) − f ( a )
∂f
(a ) = lim
λ →0
∂xi
λ
D1 f (a ) =
f (a + λe1 ) − f (a )
∂f
(a ) = lim
λ →0
∂x1
λ
r
e1 = (1,0,0,....,0)
D2 f (a ) =
f (a + λe 2 ) − f (a )
∂f
(a ) = lim
λ
→
0
λ
∂x 2
r
e 2 = (0,1,0,.....,0)
19
DELTA – MASTER
FORMACIÓN UNIVERSTARIA
C/ Gral. Ampudia, 16
Teléf.: 91 533 38 42 - 91 535 19 32
28003 MADRID
VECTOR GRADIENTE DE UNA FUNCIÓN EN UN PUNTO.
Sea f : x → R, x ⊂ R n abierto, se denomina vector gradiente de “f” en a y se simboliza por
∇ f (a ) :
∂f
∂f
∂f
∇ f (a ) =
(a ),
(a ),...,
(a )
∂x 2
∂x n
∂x1
MATRID JACOBIANA DE UNA FUNCIÓN EN UN PUNTO:
Sea F: x → R m , X ⊂ R n
F = ( f1,f2,...,fm)
∂f 1 ∂f 1 ∂f 1
..
...
∂x1 ∂x 2 ∂x n
∇f1
∂f
∂f
∂f
∇ f 2 2 ... 2 ... 2
Jf = f ' =
= ∂x1 ∂x 2 ∂x n
:
:
∇f
m ∂f m ∂f m ∂f m
...
...
∂x1 ∂x 2 ∂x n
FUNCIÓN COMPUESTA: REGLA DE LA CADENA.
u = u ( x, y )
Supongamos: z = f(u,v)
v = v( x, y )
∂z ∂z ∂u
∂z ∂V
= . .+
.
∂x ∂u ∂x ∂V ∂x
∂z ∂z ∂u ∂z ∂V
= . +
.
∂y ∂u ∂y ∂V ∂y
TEOREMA DE SCHWARZ.
Si f: A → R es de clase C2 en el abierto A de Rn, entonces, para cada par de subíndices i,j ∈{1,...,n}
se verifica:
Dij f = Dji f.
MATRIZ HESSIANA.
Dada la función real definida en el abierto A de Rn , y dado el punto a ∈ A, si f admite todas las
r
r
derivadas de segundo orden en a , llamaremos matriz hessiana de f en a a la siguiente:
20
DELTA – MASTER
FORMACIÓN UNIVERSTARIA
C/ Gral. Ampudia, 16
Teléf.: 91 533 38 42 - 91 535 19 32
28003 MADRID
D11 fD12 f ...D1n f
Hf = D21 fD22 f ...D2 n f
D fD f ...D f
nn
n1 n 2
FUNCIÓN IMPLICITA
F(x,y) = K o F (x1,x2,.... , xn , y ) = K
Derivada de la función implicita
F(x,y) = K
δF
dy
= − δx
δF
dx
δy
FUNCIONES HOMOGENEAS.
Sea f una función definida en el abierto A. Diremos que f es homogénea de grado a (a∈ ℜ ) si:
f (αx ) = α a f ( x ) ∀x ∈ A
α >0
PROPIEDADES.
(a) Si f y g son homogéneas de grado a en el abierto A, entonces f + g y f- g también son
homogéneas de grado a.
(b) Si f es homogénea de grado a y g es homogénea de grado β en el mismo conjunto abierto A,
entonces f.g es homogénea de grado a + β en A.
(c) Bajo las condiciones anteriores si g ( x ) ≠ 0∀x ∈ A, entonces f/g es homogénea de grado a- β .
(d) Si f es de clase C1 y homogénea de grado a en A, entonces sus derivadas parciales
D1f,D2f,...Dnf son homogéneas de grado a – 1.
TEOREMA DE EULER.
Sea f de clase C1 en A.
Si f es homogéneade grado a, para cada x = ( x1 , x 2 ,..., x n ) ∈ A se verifica igualda:
x1 .Df ( x ) + x 2 .D2 f ( x ) + ... + x n .Dn f ( x ) = af ( x )
CONDICIÓN NECESARIA DE 1º ORDEN DE OPTIMO LOCAL.
v ( X 0 ) = 0 es decir
∂f
( x 0 ) = 0∀i = 1,..., n, x 0 ∈ A le denominamos punto critico.
∂f i
21
DELTA – MASTER
FORMACIÓN UNIVERSTARIA
C/ Gral. Ampudia, 16
Teléf.: 91 533 38 42 - 91 535 19 32
28003 MADRID
CONDICIÓN SUFICIENTE.
Sea x 0 un punto critico de “f”
(a) Si Hf(x 0 ) D.P. ⇒ Mínimo local.
(b) Si Hf(x 0 ) D.N . ⇒ Máximo local.
(c) Si Hf(x 0 ) S .D.P. ⇒ Dudoso.
(d ) Si Hf(x 0 ) S .D.N . ⇒ Dudoso
(d ) Si Hf(x 0 )Indefinida ⇒ x 0 no es óptimo, es punto de silla.
INTEGRALES INDEFINIDAS
Decimos que F ( x ) es una primitiva de la función f ( x ) , si F' (x) = f ( x ) .
Podemos demostrar que si
F1( x ) yF2( x ) son ambas primitivas de una misma función f ( x ) , entonces
F2( x ) = F1( x ) + C , donde C es una constante. Por ello, dada una función f(x) tendremos infinitas
funciones primitivas variando sólo en una constante.
Definimos integral indefinida de f(x) como el conjunto de todas sus primitivas, y se escribe:
∫f
x
dx = F( x ) + C ;
siendo F' (x) = f ( x )
Propiedades:
1.∫ kf ( x ) dx = k ∫
[
f ( x ) dx.
]
2.∫ f ( x ) ± g ( x ) dx = ∫ f ( x ) dx ± ∫ g ( x ) dx.
3.∫ f ( g ( x )) ⋅ g ' ( x ) dx = F[g ( x ) ] + C ; siendo F' (x) = f ( x ) .
22
DELTA – MASTER
FORMACIÓN UNIVERSTARIA
C/ Gral. Ampudia, 16
Teléf.: 91 533 38 42 - 91 535 19 32
28003 MADRID
TABLA DE INTEGRALES INDEFINIDAS
n
∫ f .f'.dx =
f'
∫ f dx = L f
∫e
f
f n +1
+C
n +1
(n ≠ -1)
+C
.f' dx = e f + C
f
∫ a .f'.dx =
af
+C
L(a)
∫ senf.f'.dx = −cosf + C
∫ cosf.f'.dx = senf + C
∫ shf.f' dx = chf + C
∫ chf.f'.dx = shf + C
f'
∫ cos
2
f
2
f
f'
∫ sen
f'
∫ ch
2
f
dx = tgf + C
dx = −cotgf + C
dx = thf + C
f'
∫ sh
∫
∫
∫
dx = −cothf + C
f
f'
f
.dx = arcsen + C
a
a2 − f 2
2
f'
f
.dx = argsh + C
a
f 2 + a2
f'
f
.dx = argch + C
2
2
a
f −a
∫f
2
∫f
2
f'
1
f
.dx = arctg + C
2
a
+a
a
f'
−1
f
.dx =
argth + C
2
a
−a
a
23
DELTA – MASTER
FORMACIÓN UNIVERSTARIA
C/ Gral. Ampudia, 16
Teléf.: 91 533 38 42 - 91 535 19 32
28003 MADRID
Métodos de integración para integrales indefinidas:
1. Integrales inmediatas:
Son las que no requieren ningún proceso, sino que basta, a lo sumo, con aplicar la propiedad 3.
2. Integración por partes:
∫ udv = uv − ∫ vdu
La cuestión es elegir correctamente u(x); para ello se puede seguir la siguiente regla de prioridades :
Si elige la u(x) como sigue:
I ) Arcoseno, arcotangente y logarismos. A
L
P
E
S
II) Polinomios
III) Exponenciales y senos o cosenos.
Nota 1: Si coinciden en prioridad, da igual cual se coja, y siempre sale CÍCLICA.
Nota 2: Si se elige al polinomio como u(x), habrá que repetir la integral por partes tantas veces como
grado tenga éste.
3. Integrales racionales:
P( x )
∫Q
dx (cocientes de polinomios)
( x)
a ) grado P(x) ≥ grado Q (x) ⇒ Se dividen los polinomios :
P(x)
P(x)
∫Q
(x)
Q (x)
P(x)
C (x)
Q (x)
dx = ∫ C ( x ) dx + ∫
= C( x) +
R( x )
Q( x )
R( x )
Q( x )
b) grado P(x) < grado Q (x) , en tal caso se calcula Q (x) = 0, para factorizar Q (x) , y puede ocurrir que tenga.
1. Raíces reales simples: x = a; x = b,....
P( x )
Q( x )
=
P( x )
( x − a)( x − b)...
=
A
B
+
+ ...
x−a x−b
24
DELTA – MASTER
FORMACIÓN UNIVERSTARIA
C/ Gral. Ampudia, 16
Teléf.: 91 533 38 42 - 91 535 19 32
28003 MADRID
2. Raíces reales múltiples: x = a, x = b, (n veces),...
P( x )
( x − a )( x − b)
n
=
B3
Bn
B
B2
A
+ 1 +
+
+ ... +
2
3
x − a x − b ( x − b)
( x − b)
( x − b) n
3. Raíces complejas simples: Q( x ) = ( x − a) + (ax 2 + β x + y )
P( x )
( x − a )(ax + β x + y )
2
=
A
Mx + N
+ 2
x − a ax + β x + y
4. Raíces complejas múltiples: (Método de Hermite).
P( x )
2
( x − a)(ax + Bx + y )
2
=
A
Mx + N
d mx + n
+ 2
+ 2
x − a ax + Bx + y dx ax + β x +
y
4. Cambios de variable. (Sustitución)
a)Todas las inmediatas del tipo
∫f
(g (x) )
⋅ g' `x) dx, pueden hacerse cambiando g (x) = t
⇒ ∫ f (t) dt, (elemental).
b) Cuando cambias por una función que al ser derivada vuelve a aparecer:
1
⇒ dx = dt
t
n
n
x=t → x=t
⇒ dx = n ⋅ t n -1 dt
dt
tgx = t → x = arctgt ⇒ dx =
1+ t2
e x = t → x = Int
c) Trigonométricas. (No inmediatas).
1. Productos de senos y cosenos con diferentes argumentos, pueden ser transformados en sumas o
restas:
-1
[cos(α + β − cos(α − β )]
2
1
senα ⋅ cosβ = [cos(α + β − cos(α − β )]
2
1
cosα cos ⋅ β = [cos(a + β + cos(a − β )]
2
sen α ⋅ senβ =
25
DELTA – MASTER
FORMACIÓN UNIVERSTARIA
C/ Gral. Ampudia, 16
Teléf.: 91 533 38 42 - 91 535 19 32
28003 MADRID
2. Productos de potencias de senos y cosenos con igual argumento:
- Todos lo exponentes pares, entonces se utiliza:
sen 2α =
1 − cos 2α
1 + cos 2α
; cos 2 α =
2
2
- Algún exponente impar: se separa un único factor, quedando la potencia par y se cambia la razón
trigonométrica de ésta por t. Con lo que queda inmediata.
3. Cocientes de potencias de senos y cosenos con igual argumento:
- Todos los exponentes pares, entonces se usa:
t2
1+ t2
dt
1
dx =
cos 2 x =
2
1+ t2
1+ t
- Algún exponente impar, entonces se usa :
x
2t
tg = t
sen x =
2
1+ t2
2dt
1− t2
cos
x
dx =
=
1+ t2
1+ t2
tgx = t
sen 2 x =
d) Irracionales. (no inmediatas).
1. Radicando de primer grado.
n
ax + b . entonces cambiamos ax + b = t n .
2. Radicando de segundo grado. ax 2 + bx + c, entonces se intenta escribir como suma de un
binomio al cuadrado y un número. Puede quedar:
a 2 − f ( 2x ) c ⇒ f ( x ) = a ⋅ sent
a 2 + f (2x ) c ⇒ f ( x ) = a ⋅ sht
f (2x ) − a 2 ⇒ f ( x ) = a ⋅ cht
3. (Método alemán). Cuando aparecen cocientes de polinomios y raíces que pueden complicar los
cambios.
26
DELTA – MASTER
FORMACIÓN UNIVERSTARIA
C/ Gral. Ampudia, 16
Teléf.: 91 533 38 42 - 91 535 19 32
28003 MADRID
1. INTEGRAL DE RIEMANN.
Sea un intervalo [a, b]y{x 0 , x1 ,.....x n }∈ [a, b]tal que x o = a,+ ∆x, x 2 = a + 2 ⋅ ∆x,......,
b-a
x n = a + n ⋅ ∆x = b una partición regular del intervalo(a, b), donde ∆x =
n.
Sea f(x) una función continua en (a,b), tendremos entonces unos valores mínimos y máximos fe f(x) en
cada subintervalo:
F(mi) = valor mínimo de f(x) en el i-ésimo intervalo.
F(mi) = valor máximo de f(x) en el i-ésimo intervalo.
Podemos definir un rectángulo inscrito situado en el interior de la i-ésima región y un rectángulo
circunscrito que se extiende al exterior de la i-ésima región.
Definimos entonces:
n
Suma inferior: L( n ) = ∑ f ( mi ) ⋅ ∆x (área de los rectángulos inscritos).
i =1
n
Suma superior: U ( n ) = ∑ f ( mi ) ⋅ ∆x (área de los rectángulos circunscritos).
i =1
Si f(x) es continua y no negativa en (a,b) se puede demostrar que lim L( n ) = lim U ( n )
n →∞
n →∞
Definición de integral definida:
Si f está definida en (a,b) y esiste lim L( n ) = lim U ( n ) , entonces decimos que f es integrable en (a,b) y
n →∞
n →∞
denotamos dicho límite como:
b
∫f
( x)
dx
a
PROPIEDADES:
b
1.
∫f
( x)
dx =0
a
b
2.
∫f
b
( x)
∫f
dx =-
a
b
3.
∫
a
b
dx .
c
f ( x ) dx =
∫
a
f ( x ) dx +
a
4. ∫ kf ( x ) dx =k
a
( x)
a
∫f
( x)
dx .
c
b
∫f
( x)
dx .
a
27
DELTA – MASTER
FORMACIÓN UNIVERSTARIA
C/ Gral. Ampudia, 16
Teléf.: 91 533 38 42 - 91 535 19 32
28003 MADRID
b
5.
∫[
f ( x ) ± g ( x ) ]dx = ∫ f ( x ) dx ± ∫ f ( x ) dx.
a
6. si
b
b
a
a
b
b
a
a
f ( x ) ≤ g ( x ) ∀x ∈ [a, b] ⇒ ∫ g ( x ) dx ≤ ∫ g ( x ) dx.
INTEGRAL DOBLE:
Sea una función z = f(x,y), y sea un recinto D del plano XY entonces podemos escribir:
∫∫ f ( x, y ) dxdy
D
El calculo de dicha integral puede hacerse de varias formas, y éstas dependen del recinto D.
y = n( x )
Si D es regular en X, entonces, ∫∫ f ( x , y ) dxdy = ∫ ∫ f ( x , y ) dy dx
D
x=a
y = m( x )
y = d x = q( y )
Si D es regular en y, entonces, ∫∫ f ( x , y ) dxdy = ∫ ∫ f ( x , y ) dy dx
D
y =c
x = p( x )
Si D no es de ninguna de las dos formas anteriores, se procura dividir en partes de manera que
éstas coincidad con alguna de las formas anteriores.
Por último, se puede realizar un cambio de variables conveniente para facilitar el cálculo de la
integral doble.
x =b
a)
b)
c)
d)
x = x ( n ,v )
Si ponemos
y se cumple :
y = y ( n ,v )
•
•
•
Si ponemos X(u,v),y(u,v) son continuas ellas y sus derivadas de primer orden.
Existe una correspondencia biunívoca continua en ambos sentidos entre los puntos del recinto
D de XY y el recinto D* de uv.
( x, y )
Que el Jacobiano de estas funciones J
conserve invariable su signo en el recinto D.
(u , v
28
DELTA – MASTER
FORMACIÓN UNIVERSTARIA
C/ Gral. Ampudia, 16
Teléf.: 91 533 38 42 - 91 535 19 32
28003 MADRID
Entonces podemos escribir:
∫∫ f
( x, y )
dxdy = ∫∫ f ( x( u , v ) , y( u , v ) ) ⋅ j dudv
D⋅
D
NOTA : Si el cambio es a coordenadas polares :
x = rcosθ ( x, y )
=r
j
y = rsenθ (r , θ )
∫∫ f
D
( x, y )
dxdy = ∫∫ f ( rθ ) .rd rdθ
D⋅
29