practica 2 control de sistemas de eventos discretos. introduccion a
Anuncio

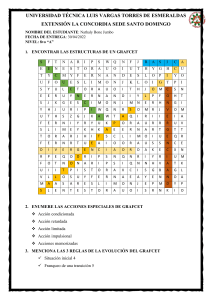
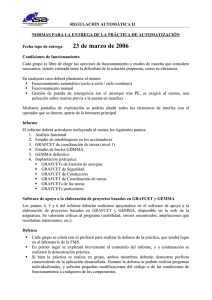
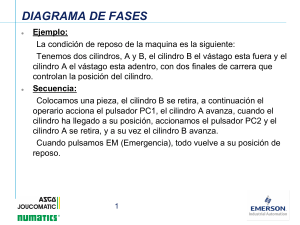
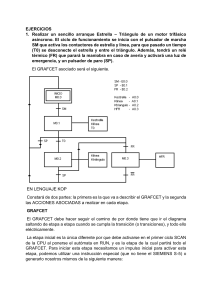
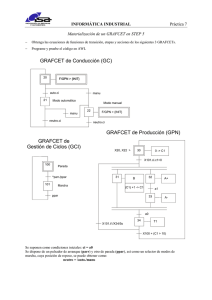
INFORMÁTICA INDUSTRIAL PRACTICA 2 CONTROL DE SISTEMAS DE EVENTOS DISCRETOS. INTRODUCCION A LA PROGRAMACION EN GRAFCET. INGENIERÍA DE SISTEMAS Y AUTOMÁTICA. 23 INFORMÁTICA INDUSTRIAL EJERCICIO 1 Un carrito de transporte funciona de la siguiente manera. Estando en reposo en el extremo izquierdo se pone en marcha ,mediante un pulsador M, hacia la derecha . Cuando toca el final de carrera B invierte su marcha hacia la izquierda. Cuando toca el final de carrera A se para esperando una nueva orden de marcha. M i d B A Figura 37 Se deberán utilizar tres entradas ( pulsador M y dos finales de carrera ) y dos salidas (marcha a derechas y marcha a izquierdas). Dibujar el diagrama de estados de la máquina. Implementar el programa en lenguaje Grafcet. Programar las transiciones en Literal Estructurado. INGENIERÍA DE SISTEMAS Y AUTOMÁTICA. 24 INFORMÁTICA INDUSTRIAL INGENIERÍA DE SISTEMAS Y AUTOMÁTICA. 25 INFORMÁTICA INDUSTRIAL Para comprobar el funcionamiento de un Grafcet: Creación de una tabla de Animación. Ir al comando del menú de Edición- seleccionar la página, menú Servicios- Inicializar una tabla de Animación. En la tabla se crean objetos: %X1,%X2…. : son los bits de las etapas del grafcet. %X1.T,%X2.T…. : son palabras de 16 bits que cuentan el tiempo que llevan activa por última vez las etapas del grafcet (en décimas de segundo). Figura 38. Creación de una tabla de animación en Grafcet. INGENIERÍA DE SISTEMAS Y AUTOMÁTICA. 26 INFORMÁTICA INDUSTRIAL EJERCICIO 2 En base al ejercicio anterior se deberá implementar un programa que controle el funcionamiento de dos carritos que funcionan igual que el anterior con la diferencia de que deben esperarse mutuamente en el extremo derecho para poder invertir el sentido de giro. Además deberán esperarse en el extremo izquierdo para realizar un nuevo ciclo debiéndose dar nuevamente la orden de marcha M. Se deberán utilizar 5 entradas (pulsador M y cuatro finales de carrera ) y cuatro salidas(marcha a derechas y marcha a izquierdas de cada uno de los carritos). M i d B A i d D C Figura 39 Implementar el programa en Lenguaje Grafcet. Programar las transiciones y el módulo Post en Literal estructurado. Crear una tabla de símbolos y utilizarla en la programación. Programar las salidas en el módulo Post. La creación de la tabla de símbolos se efectúa en la pantalla de variables (navegador de Aplicación, variables) Figura 40. Creación de la tabla de símbolos. INGENIERÍA DE SISTEMAS Y AUTOMÁTICA. 27 INFORMÁTICA INDUSTRIAL Figura 41. Programación de una transición sin condiciones (siempre verdad) INGENIERÍA DE SISTEMAS Y AUTOMÁTICA. 28 INFORMÁTICA INDUSTRIAL Modificar el programa de manera que una vez los dos carritos han llegado al extremo derecho permanezcan en el 10 segundos antes de retornar. Hacerlo sin añadir ninguna etapa al Grafcet. Programar las salidas en las etapas del grafcet ( en lenguaje literal). Configurar la tarea maestra como cíclica, ejecutar el programa. Estimar el tiempo de ciclo del programa Tiempo de ejecución de la tarea maestra. Comparar los tiempos en autómatas que dispongan de procesadores diferentes (3710 ó 3722). INGENIERÍA DE SISTEMAS Y AUTOMÁTICA. 29 INFORMÁTICA INDUSTRIAL EJERCICIO 3. PROCESO DE ELECTRÓLISIS. Para la realización del siguiente proceso contaremos con: - Dos motores de doble sentido de rotación, uno para el movimiento vertical de la grúa y otro para el movimiento transversal. - Seis finales de carrera (F2, F3, F4, F5, F6 y F7). - Un pulsador de marcha S2. Descripción del proceso. El proceso que se va a describir a continuación consiste en el procedimiento para el tratamiento de superficies, con el fin de hacerlas resistentes a la oxidación. El sistema constará de tres baños: - Uno para el desengrasado de las piezas. - Otro para el aclarado de las piezas. - Un tercero donde se les dará el baño electrolítico. La grúa introducirá la jaula portadora de las piezas a tratar en cada uno de los baños, comenzando por el de desengrasado, a continuación en el de aclarado y por último les dará el baño electrolítico; en este último, la grúa debe permanecer un tiempo determinado para conseguir una uniformidad en la superficie de las piezas tratadas. En la siguiente figura se ilustra el proceso a automatizar. Figura 42.. Realizar el programa en lenguaje Grafcet. INGENIERÍA DE SISTEMAS Y AUTOMÁTICA. 30 INFORMÁTICA INDUSTRIAL Modulo Chart. INGENIERÍA DE SISTEMAS Y AUTOMÁTICA. 31 INFORMÁTICA INDUSTRIAL Programación de transiciones y modulo Post. INGENIERÍA DE SISTEMAS Y AUTOMÁTICA. 32 INFORMÁTICA INDUSTRIAL EJERCICIO 4 Implementar el GRAFCET que controle la máquina de taladrado. C1AB C2A pulsadorM Cilindro 2 CIAR C2A TaladroT Cilindro 1 Presostato P C1D final de carrera c2s C1I final de carrera c2i PIEZA final de carrera c1d Figura 43 Una vez colocada la pieza en la máquina , el operario da al pulsador de marcha . En ese momento el cilindro 1 se desplaza hacia la derecha . Una vez el presostato P detecta que la pieza esta suficientemente presionado, el cilindro 2 se desplaza hacia abajo y el taladro empieza a girar. Cuando el taladro toca el final de carrera c2i , indica que la pieza ha sido ya taladrada y el cilindro 2 debe efectuar el retorno hacia arriba , hasta tocar el final de carrera c2s y el taladro debe pararse. A continuación el cilindro 1 inicia el retorno hacia izquierda hasta tocar el final de carrera c1d. INGENIERÍA DE SISTEMAS Y AUTOMÁTICA. 33 INFORMÁTICA INDUSTRIAL INGENIERÍA DE SISTEMAS Y AUTOMÁTICA. 34