- Ninguna Categoria
Platform for Evaluation of Control Strategies of Functional
Anuncio
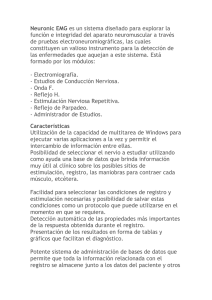
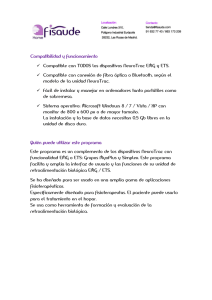
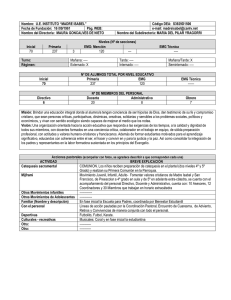
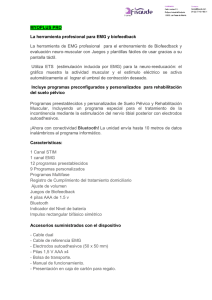
IEEE LATIN AMERICA TRANSACTIONS, VOL. 8, NO. 1, MARCH 2010 17 Platform for Evaluation of Control Strategies of Functional Stimulators Through the EMG of the Same Stimulated Muscle S. O. Escobar, J. M. Reta and C. B. Tabernig Abstract— The development of a platform for the evaluation of control algorithms of functional stimulators commanded by the surface electromyogram of the same electro-stimulated muscle is described. It is conformed by a stage of conditioning and other processing. The first carries out the removal of the electrical stimulus artifact and the amplification and filtering of the signal. The second stage provides a processing environment for the implementation of algorithms and allows the creation of a control signal to the stimulator. The prototype was tested with simulated and real signals, evaluating the removal of the artifact, signal amplification, the frequency response of the filters, adquisition and storage of data. The results showed good performance of the artifact´s suppressor, very good SNR of the signal conditioned and high reliability in storing the digitized data, obtaining a suitable tool for rapid assessment of algorithms. estrategias de control y comando de los sistemas de FES. Estas estrategias son implementadas a través de algoritmos que, en general, presentan estructuras como la mostrada en la Fig. 1 [2]. En la misma se identifica un bloque de Acondicionamiento de señal encargado del procesamiento digital y una Unidad de Detección. Esta última tiene la función de identificar el inicio de la contracción voluntaria mediante una Función de Test y una Regla de Decisión, ambas específicas para cada algoritmo. Keywords— control, electromyography, functional electrical stimulation. L I. INTRODUCCIÓN AS DIFICULTADES en el control motor voluntario son secuelas comunes posteriores a los daños medulares y cerebrales producidos por accidentes cerebro vasculares, traumas, tumores y otras disfunciones de la neurona motora superior. Una alternativa ortésica empleada en estos casos para la restauración de la función perdida es la estimulación eléctrica funcional (FES, por su sigla en inglés) que logra la activación del sistema neuromuscular dañado a través de pulsos eléctricos apropiados, generados por un equipo que es comandado por señales bajo control voluntario de la persona [1]. Una de las principales aplicaciones de la FES es la asistencia a las funciones motoras de personas con paresias musculares. En estos casos la contracción voluntaria del músculo parético es completada con la evocada por el estímulo eléctrico [4]. Estudios clínicos reportaron que los procesos plásticos involucrados en el re-aprendizaje motor se facilitan cuando la señal de comando del equipo de FES proviene del mismo sistema neuromuscular que está siendo estimulado [2]. Esta observación, de gran relevancia en la terapia de rehabilitación de los pacientes con pérdidas funcionales parciales, ha impulsado la necesidad de optimizar la recuperación de señales voluntarias de músculos paréticos e idear nuevas S. O. Escobar, J. M. Reta y C. B. Tabernig son docentes investigadores de la Facultad de Ingeniería de la Universidad Nacional de Entre Ríos, Entre Ríos, Argentina, [email protected], [email protected], [email protected]. Figura 1: Estructura general de un algoritmo de detección de inicio de contracción muscular por EMG. Durante la evaluación de nuevas estrategias de control y comando de sistemas de FES, es conveniente realizar los primeros ensayos de los algoritmos en forma off-line y luego evaluar su funcionamiento en tiempo real. En función de ello, surge la necesidad de contar con una herramienta que permita implementar, y posteriormente evaluar, diversos algoritmos de control de estimuladores funcionales comandados por EMG. En este trabajo se presenta el diseño, implementación en prototipo y evaluación técnica de una plataforma que registra la señal de EMG del mismo músculo parético que está siendo estimulado, brinda un entorno de procesamiento para algoritmos con la estructura descripta y permite la generación de una señal de control para el estimulador. II. REQUERIMIENTOS DEL DISEÑO Para establecer los requisitos de la plataforma se tuvo en cuenta que la señal a registrar estará constituida por el artefacto del estímulo, el EMG voluntario, el EMG evocado por el estímulo u onda M y el ruido inherente a la medición, tal como puede observarse en la Fig. 2. En consecuencia, la plataforma deberá atenuar el artefacto del estímulo, amplificar y acondicionar la señal de EMG; digitalizarla a través de un conversor analógico/digital (CAD) y brindar un entorno de programación basado en microcontrolador (µC) que permita al usuario la implementación de los algoritmos. 18 IEEE LATIN AMERICA TRANSACTIONS, VOL. 8, NO. 1, MARCH 2010 algoritmos requieren de la implementación de las siguientes etapas: rectificación de onda completa, filtrado pasabajos (por ejemplo, Butterworth de 6to orden), promediación sobre ventana móvil de al menos 50 muestras y comparación contra un umbral ajustable. En este sentido se cuantificó el costo computacional de las funciones mencionadas medido en cantidad de multiplicaciones, sumas y registros de memoria necesarios [11]. Se consideró además el tiempo de procesamiento disponible para las operaciones mencionadas, el cual es de 40 ms para una frecuencia de estimulación típica de 25 Hz [4]. Por lo tanto se fijó como requisito de procesamiento para el µC, que pueda resolver un mínimo de 50000 multiplicaciones y 50000 sumas en 8 bits por segundo y disponer de al menos 1024 bytes de memoria RAM para el procesamiento de las muestras. Por último, para el comando del estimulador, se requirió de una salida digital a ser empleada para la habilitación/deshabilitación de la estimulación eléctrica. Figura 2. Señal a registrar por la plataforma Teniendo en cuenta que el EMG presenta una amplitud típica de hasta 5 mV pap y que es necesario un rango de trabajo para la digitalización de 5 V, se estableció como requisito que el sistema amplifique con una ganancia mayor o igual a 60 dB. Para el acondicionamiento de la señal se consideró que la potencia del EMG útil, en esta aplicación, se encuentra entre 20 y 400 Hz [5]; por lo tanto se requirió contar con un bloque de filtrado pasabanda centrado en esta banda. Teniendo en cuenta el teorema de muestreo de Shannon, se estableció que la frecuencia de muestreo sea superior a 800 Hz. Considerando un ruido gaussiano presente en la señal de 1 uVrms [5] (factor de cresta igual a 6) y la amplitud típica del EMG, se calculó el rango dinámico de la señal ( RDSEMG ) como: RD SEMG = 20 Amplitud pap SEMG log 10 Amplitud pap Ruido = 20 5000 uV log 10 = 58 , 4 dB 6 uV En función de esto se estableció que el rango dinámico del CAD (RDCAD) sea mayor o igual al RDSEMG . Además, como: nbits ≥ RDCAD 20 log10 (2) se requirió una resolución del CAD mayor o igual a 10 bits. Considerando la sensibilidad que presentan algunos algoritmos de detección a la presencia de ruido en la señal de entrada, se estableció como requisito para la etapa de acondicionamiento que la relación señal ruido de salida (SNR por sus siglas en inglés) sea de al menos 20 dB en condiciones de laboratorio. Para establecer los requisitos del µC, se consideró la estructura básica de un algoritmo de detección de contracción muscular a partir del EMG y se realizó una estimación del costo computacional basada en el análisis de tres de los algoritmos más reportados en la bibliografía [2]. Estos III. DESCRIPCIÓN DEL DISEÑO El diseño propuesto de la plataforma incluye dos etapas: una de acondicionamiento y otra de procesamiento; divididas a su vez en bloques, tal como se muestra en la Fig. 3. Figura 3. Etapas y bloques de la plataforma diseñada. A. Acondicionamiento La etapa de acondicionamiento está constituida por dos bloques: un bloque Amplificador y un bloque de Filtrado y Ganancia. El bloque Amplificador está formado por un amplificador de instrumentación y dos amplificadores de bajo ruido para la atenuación del artefacto producido por el estímulo y la configuración de la ganancia, respectivamente. En la Fig. 4 se puede observar el circuito esquemático de este primer bloque. Figura 4. Circuito esquemático del bloque de amplificación y filtrado. El amplificador de instrumentación está compuesto por un INA128 de la firma Texas Instruments [6] con acople de alterna y ganancia 20. Para proteger las entradas del ESCOBAR et al.: PLATFORM FOR EVALUATION OF CONTROL amplificador del campo eléctrico generado por el estímulo, se utiliza un arreglo de diodos en antiparalelo. El circuito atenuador del artefacto del estímulo está implementado mediante llaves analógicas con control digital, MAX333ACPP de Maxim [7], y un amplificador operacional atenuador, OP77 de Analog Devices [9]. El control de las llaves analógicas se realiza desde un monoestable disparado por una entrada de sincronismo, ópticamente aislada, proveniente del estimulador. De esta forma, durante la ocurrencia del estímulo se conectan a masa las entradas del amplificador de instrumentación y se conmuta la ganancia del amplificador de bajo ruido de 1 a 0,01. El tiempo de acción mínimo de la señal de control es el ancho del pulso de estimulación pudiendo extenderse hasta 8 mseg mediante el ajuste de un potenciómetro. Por último, este bloque cuenta con otro OP77, en configuración inversora, el cual permite seleccionar la ganancia total de la etapa entre 200 y 4000 a través de una llave de 5 posiciones. El bloque de Filtrado y Ganancia, está compuesto por dos filtros tipo Butterworth de segundo orden a partir de dos estructuras de Sallen-Key en cascada: un pasaaltos con frecuencia de corte en 20 Hz (a -3dB) y un pasabajos en 400 Hz. El circuito de salida de este bloque utiliza un amplificador operacional “rail to rail”, MC3302 de On Semiconductor [8]. Éste permite ajustar los niveles de offset y ganancia además de optimizar el rango dinámico de salida. 19 A fin de satisfacer el requisito de control en tiempo real, el firmware fue diseñado de manera de realizar las tres tareas en forma multiplexada en el tiempo: Digitalización, Detección y Control. Para poder acotar estas tareas, se divide a la señal en ventanas definidas por el intervalo entre un estímulo y el siguiente. El proceso se esquematiza en la Fig. 5. En la ventana n se realiza la Digitalización de la señal perteneciente a este intervalo y la Detección sobre los datos almacenados durante la ventana n-1. De esta forma, hacia el final de la ventana n el algoritmo de detección debe tomar la decisión de Control (habilitar o deshabilitar el estimulador) durante la ventana (n+1). B. Procesamiento Esta etapa está basada en el µC PIC18F4620 de la firma Microchip [10], cuyas principales características se resumen en la Tabla I. TABLA I PRINCIPALES CARACTERÍSTICAS DEL µC PIC18F4620 Figura 5. Esquematización del proceso de digitalización y detección de la señal de EMG. La señal filtrada ingresa al microcontrolador donde es digitalizada utilizando una frecuencia de muestreo de 2kHz y una resolución de 10 bits. Con el fin de facilitar la implementación de los algoritmos de comando y control, el software que se ejecuta en el microcontrolador (firmware) está desarrollado en forma completa en lenguaje ANSI C. El firmware resuelve la adquisición y el almacenamiento (Digitalización) de los datos dejando para el usuario la implementación del algoritmo de detección (Detección) y la generación de la señal de control del estimulador (Control). La principal restricción para la implementación del algoritmo de control es el tiempo disponible, el cual está acotado por el período de estimulación (Te). Por ejemplo para un Te de 40 ms, el algoritmo a implementar se debe resolver en menos de 400.000 ciclos de máquina del microcontrolador. Teniendo en cuenta la información mostrada en la Tabla 1 se puede verificar que el microcontrolador seleccionado cumple las exigencias relativas al procesamiento en tiempo real para esta aplicación. IV. EVALUACIÓN DEL DISEÑO La evaluación del cumplimiento de los requerimientos de diseño se realizó mediante los siguientes ensayos: 20 IEEE LATIN AMERICA TRANSACTIONS, VOL. 8, NO. 1, MARCH 2010 Amplificación de la señal y Supresión del Artefacto del Estímulo Respuesta en Frecuencia Adquisición y Almacenamiento A. Amplificación de la señal y Supresión del Artefacto del Estímulo En este ensayo se realizó el testeo la etapa de amplificación con señales simuladas y reales. Se generó una señal artificial de simulación del EMG y del artefacto del estímulo a partir de un atenuador, un generador de pulsos, un generador de funciones con entrada de sincronismo y un circuito derivador. La señal de simulación se muestra en la Fig. 6. Esta señal se ingresó a la etapa de acondicionamiento y su salida se visualizó utilizando un osciloscopio digital. Figura 6. Gráfica de la señal simulada. Las señales reales de EMG fueron registradas del músculo extensor de la muñeca en situaciones de contracción muscular voluntaria leve, moderada e intensa y con bajos niveles de estimulación. En la Fig. 7 puede observarse un esquema de la situación de estimulación y registro. Para la estimulación eléctrica se emplearon electrodos superficiales adhesivos de goma conductora ubicados sobre el punto motor del músculo extensor de la muñeca. Para el registro de la señal se emplearon electrodos descartables adhesivos circulares de AgClAg de 1cm de diámetro distanciados 2cm entre sí y ubicados perpendicularmente a los de estimulación. El voluntario, sin historia de lesiones neuromusculares previas, dio su consentimiento informado para participar del estudio. B. Respuesta en frecuencia Este ensayo se realizó utilizando un generador de señales y un osciloscopio digital. Se conectaron a la entrada del bloque de filtrado y corrección de ganancia y nivel, señales sinusoidales de frecuencias comprendidas entre 0,5 Hz y 5 kHz. La relación de amplitudes entre la entrada y la salida fue medida mediante el osciloscopio. Figura 7. Esquema de la situación experimental de estimulación y registro de señales reales de EMG del músculo extensor de la muñeca. C. Adquisición y Almacenamiento Para medir la frecuencia de muestreo real de la señal, parámetro que es necesario conocer con precisión para la implementación de los filtros digitales, se agregó en el hardware un punto de medición externo. El mismo se encuentra conectado a un puerto del microcontrolador que cambia de estado cada vez que se convierte una nueva muestra. De esta forma, conectando la entrada de la etapa de acondicionamiento a la señal emulada y mediante le empleo de un frecuencímetro pudo medirse la frecuencia de muestreo real del sistema. Por otro lado, para verificar el correcto almacenamiento de los datos digitalizados, según la estructura de ventanas de la Fig. 5, se utilizó la herramienta de depuración ICD2 de Microchip® [10]. La misma se conectó a un puerto dedicado presente en el hardware y utilizando el entorno de depuración MPLAB® [10] se pudo detener la ejecución del programa luego del almacenamiento de cada ventana y visualizar los datos guardados en la memoria RAM del microcontrolador. Con el objetivo de corroborar la utilización de todo el rango dinámico del CAD, se conectó a cada uno de los canales de adquisición un nivel de tensión constante y se realizó el análisis de los datos almacenados en la memoria del µC para determinar si efectivamente eran invariantes. V. RESULTADOS En la Fig. 8 se observan trazados de osciloscopio correspondientes a las salidas del bloque de amplificación y filtrado con el supresor de artefacto activado, obtenidas al ingresar con señales simuladas. Se puede apreciar el funcionamiento del circuito atenuador del artefacto del estímulo observando que se ha suprimido la espiga presente en la señal de entrada. Adicionalmente, este circuito impide la saturación del amplificador evitando de esta forma la perdida de señal útil durante el tiempo de restablecimiento del punto de trabajo del mismo. En la Fig. 9 se visualizan los trazados del osciloscopio correspondientes a la entrada y salida de la etapa de acondicionamiento para los ensayos realizados con registros reales de EMG. En ellos se puede observar una porción remanente del artefacto de estimulación seguido de actividad muscular voluntaria. ESCOBAR et al.: PLATFORM FOR EVALUATION OF CONTROL 21 digitalizados y la integridad de las ventanas a ser utilizadas por los algoritmos de comando y control. Por medio de la adquisición de señales constantes sobre los tres canales del sistema se pudo comprobar que el ruido total de la etapa previa al conversor se mantuvo por debajo del ruido de cuantificación del mismo, aprovechándose de esta manera todo el rango dinámico correspondiente a los 10 bits del conversor analógico/digital. En la Fig. 10 se presenta una fotografía del prototipo de la plataforma conectada a un sistema FES para corrección de la caída del pie. Como puede observarse, este prototipo fue montado en forma modular con el objetivo de facilitar la evaluación de su desempeño por bloque. En una etapa posterior se integrará el desarrollo en una única tarjeta impresa doble faz con tecnología de montaje superficial con el propósito de obtener la portabilidad necesaria. Figura 8. A) Entrada de señal simulada en una escala de 1V/div . B) Trazado del osciloscopio correspondiente a la salida del bloque de amplificación y filtrado con el supresor de artefacto activado (1V/div). Tanto en los ensayos con señales simuladas como con señales reales se realizó la medición, en forma indirecta mediante el empleo del osciloscopio, de la SNR en la entrada del CAD. Para ambos casos la SNR fue mayor a 25 dB, demostrando un muy buen rechazo al ruido; necesario para el correcto funcionamiento de los algoritmos de detección. Figura 10. Fotografía del prototipo de la plataforma implementada conectada al estimulador con el conjunto de electrodos de de estimulación registro. VI. CONCLUSIONES Figura 9. A) Registro de la señal de EMG del extensor de los dedos correspondiente a una contracción voluntaria intensa. B) Trazo del período de activación del circuito reductor de artefacto. Como resultado del barrido de frecuencias realizado para evaluar la respuesta en frecuencia del bloque de filtrado, las frecuencias de corte del sistema pasa-banda obtenidas fueron 20 y 400 Hz para el pasa-altos y pasa-bajos respectivamente. La excursión de la señal de salida medida fue de 4,2 V con un desplazamiento en continua de 2,1V; adecuada para ser introducida a la etapa siguiente. La frecuencia de muestreo real medida fue de 1,98 kHz. Además se comprobó el correcto almacenamiento de los datos En este artículo se presentó el diseño, montaje en prototipo y evaluación técnica de una plataforma para la implementación de estrategias de control y comando de sistemas de estimulación eléctrica funcional por medio del electromiograma del mismo músculo que está siendo estimulado. Durante los ensayos se comprobó que se alcanzaron los requerimientos de diseño. Se obtuvo de esta manera una herramienta tecnológica que permitirá la rápida evaluación de estrategias de control de estimuladores funcionales. Las mismas, implementadas a través de algoritmos cuyas estructuras presentan unidades de Acondicionamiento y de Detección, podrán ser programadas en la plataforma desde una PC y luego comprobadas mediante su uso on-line en la restauración de funciones motoras de pacientes con paresias musculares. A partir de los resultados obtenidos se continuará trabajando para disminuir el peso y el tamaño de la plataforma, tarea necesaria para mejorar su versatilidad y poder avanzar sobre la exploración nuevas estrategias de control y comando de sistemas de FES. 22 IEEE LATIN AMERICA TRANSACTIONS, VOL. 8, NO. 1, MARCH 2010 REFERENCIAS [1] G. Loeb y R. Davoodi, “The functional reanimation of paralyzed muscles,” IEEE Eng in Medicine and Biology. 5, 45-51, set./oct. 2005. [2] J. Cauraugh, K. Ligth, K. Sangbum, M. Thigpen, A. Behrman, “Chronic motor dysfunction after stroke. Recovering wrist and finger extension by electromiography-triggered neuromuscular stimulation,” Stroke, 13601364, 2000. [3] G. Staude, C. Flachenecker, M. Daumer y W. Wolf, “Onset detection in surface electromyographic signals: a systematic comparison of methods,” EURASIP Journal on Applied Signal Processing, vol 2001, pp. 67 – 81, Enero 2001. [4] C. Tabernig y R. Acevedo, “M-wave elimination from surface EMG of electrically stimulated muscles using SVD: preliminary results,” Medical Engineering & Physics, vol. 30, n.º 6, 800–803, Jul. 2008. [5] R. Merletti, P. Parker, “Electromyography. Physiology, Engineering, and Non-invasive Applications”, New Jersey: John Wiley & Sons, IEEE Press Series in Biomedical Engineering, 2004. [6] Texas Instrument Incorporated. Disponible en http://www.ti.com [7] Maxim Integrated Product. Disponible en: http://www.maxim-ic.com [8] ON Semiconductor. Transferido por Freescale Semiconductor. Disponible en: http://www.onsemi.com/ [9] Analog Devices, Inc. Disponible en http://www.analog.com/ [10] Microchip Technology Inc. Disponible en: http://www.microchip.com [11] R. Blahut., Fast algoritms for digital signal processing, United States of America: Addison-Wesley Publishing, 1985. Sergio Escobar Nació en Paraná, Argentina el 26 de mayo de 1965. Recibió el título de Bioingeniero en la Facultad de Ingeniería de la Universidad Nacional de Entre Ríos en 2000. Actualmente está realizando la Maestría en Ingeniería Biomédica en la Facultad de Ingeniería de la Universidad Nacional de Entre Ríos, se desempeña como investigador y docente en el Departamento Bioingeniería de la Facultad de Ingeniería de la Universidad Nacional de Entre Ríos (Argentina), Cuenta con varias publicaciones nacionales e internacionales. Sus áreas de interés son la instrumentación y el equipamiento para rehabilitación. Juan Manuel Reta Nació en Rosario, Argentina el 19 de marzo de 1978. Recibió el título de Bioingeniero en la Facultad de Ingeniería de la Universidad Nacional de Entre Ríos en 2003. Actualmente está realizando la Maestría en Ingeniería Biomédica en la Facultad de Ingeniería de la Universidad Nacional de Entre Ríos, se desempeña como docente e investigador en el Departamento Electrónica de la Facultad de Ingeniería de la Universidad Nacional de Entre Ríos (Argentina), Cuenta con publicaciones nacionales e internacionales. Participó de diversos proyectos de diseño y desarrollo de dispositivos biomédicos y biológicos. Sus áreas de interés son el procesamiento digital de señales, el diseño y desarrollo de sistemas microprocesados y la instrumentación la instrumentación biomédica Carolina Tabernig nació en Santa Fe, Argentina el 8 de mayo de 1967. En 1992 recibió el título de Bioingeniera y en 2004 el de Magíster en Ingeniería Biomédica. Se desempeña como docente investigador de los Departamentos de Electrónica y Bioingeniería, y como Directora de la Maestría en Ingeniería Biomédica de la Facultad de Ingeniería de la Universidad Nacional de Entre Ríos (Argentina). Ha sido Directora del Laboratorio de Ingeniería de Rehabilitación de la FIUNER y de varios proyectos de investigación en el área de la estimulación eléctrica funcional. En el desarrollo de dispositivos y aplicación de esta técnica de rehabilitación se desempeñó de 1992 a 2002 en el Hospital de Rehabilitación Dr. Candioti de la ciudad de Santa Fe. Cuenta con varias publicaciones nacionales e internacionales en el área de la ingeniería biomédica. Ha sido miembro del IEEE desde 1990 a 2007 y Presidenta del Capítulo de Ingeniería Biomédica del IEEE, Argentina durante 1995. Sus áreas de interés son el procesamiento de la señal de electromiografía y el equipamiento para rehabilitación.
 0
0
Anuncio
Documentos relacionados



Descargar
Anuncio
Añadir este documento a la recogida (s)
Puede agregar este documento a su colección de estudio (s)
Iniciar sesión Disponible sólo para usuarios autorizadosAñadir a este documento guardado
Puede agregar este documento a su lista guardada
Iniciar sesión Disponible sólo para usuarios autorizados