1.1. Dasdas
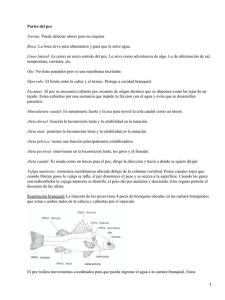
A modo de glosario, la figura 1.1 muestra un esquema con las distintas denominaciones de aletas de un pez.
Serán de utilidad para más adelante, explicar grosso modo los tipos de locomoción en peces.
Figura 1.1: Clasificacion aletas de un pez.
Se pueden entonces, diferenciar dos tipos de conjuntos de aletas.
Aletas Pareadas:
• Aletas pectorales
• Aletas pélvicas
Aletas Medias:
• Aleta dorsal
• Aleta anal
• Aleta caudal
1.2.
Modos de locomoción
A continuación se dará una pequeña reseña acerca de los tipos de movimiento de los peces. No se
profundizara en la anatomía de los mismos, o en las componentes especializadas involucradas, dando sólo,
en caso de ser necesario, referencias a estructuras de manera sucinta.
1.2.1.
Locomoción BCF
La mayoría de los peces se impulsan arqueando sus cuerpos, imitando una forma de onda que se desplaza
en dirección opuesta a la de avance del pez hasta extenderse hacia su aleta caudal. Este tipo de forma de
desplazamiento es el conocido como Body and/or Caudal Fin (BCF) Locomotion.
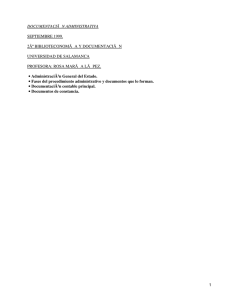
El tipo de locomoción BCF es a su vez clasificado en otras cinco subcategorías: cuatro de las cuales emplean
una forma de propulsión ondulatoria mientras que la última emplea un tipo de propulsión oscilatoria. La
figura 1.2, esquematiza estas cinco subcategorias, explicitando las diferencias entre cada una.
Figura 1.2: Tipos de propulsión BCF.
En las formas de propulsión BCF tipo ondulatorias la onda propulsiva recorre el pez en dirección opuesta a la
de su avance y a una velocidad mayor que la de desplazamiento del pez, siendo la diferencia principal entre
cada subcategoria, la amplitud de la onda generada, y la fuente o el lugar de generación y participación de la
misma.
a. Tipo anguiliforme: encontrada en la anguila, congrio, etc. es un sistema de locomoción ondulatorio puro
en el cual participa la mayor parte o incluso todo el cuerpo del pez. La amplitud de la onda se incrementa en
dirección a la cola.
b. Tipo subcarangiforme: similar al modo de locomoción de la de la trucha. Se caracteriza porque la
amplitud de la onda se incrementa sensiblemente en la mitad posterior del pez, conformando este sector la
fuente del movimiento.
c. Tipo carangiforme: empleado por el salmón. Las ondulaciones del cuerpo se restringen a su último tercio
y el empuje es aportado mayormente por una endurecida aleta caudal. Puesto que se pierde menos energía
en la impulsión lateral de agua y en la formación de vórtices, la eficiencia propulsiva se mejora y eso permite
a estas formas de propulsión ser más rápidas que las de tipo subcarangiforme o que las de tipo anguiliforme,
pero mucho más ineficaces al acelerar o para producir giros.
d. Tipo tuniforme: el empleado por el atún. En este caso, el empuje es generado mediante un mecanismo
de control de la vorticidad, producido por la combinación entre movimientos laterales significativos en la
aleta caudal y movimientos pendulares en la zona de unión de ésta aleta con el tronco del pez. El cuerpo de
las especies que lo emplean tiene un perfil muy hidrodinámico.
e. Tipo ostraciforme: el empleado por el pez cofre, es el único tipo de locomoción BCF puramente
oscilatorio. Se caracteriza por una oscilación (similar a un péndulo) de la aleta caudal mientras que el cuerpo
permanece rígido.
1.2.2.
Locomoción MPF
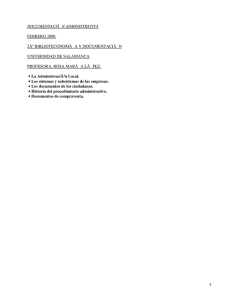
En contrapartida, ciertas otras especies han desarrollado formas de nado empleando sus aletas medias y
pectorales, lo que se conoce como Median and/or Paired Fin (MPF) Locomotion. La figura 1.3 muestra las
subcategorias para esta locomoción. Dado lo complejo y lo variado de este tipo de impulsión, y
considerando que el proyecto no utilizará este tipo de movimiento, solo se le menciona y no se singulariza.
Figura 1.3: Tipos de propulsión MPF.
Diseño Biomimetico
El objetivo, como ya se mencionó, consiste en construir un robot biomimetico de un pez. Se debe, una vez
recopilados los antecedentes acerca de los sistemas de impulsión de los peces bajo el agua, realizar un
análisis teórico de este movimiento, en orden de obtener un modelo lo más cercano posible a la realidad,
que permita realizar un diseño acorde a los objetivos del proyecto, con propiedades geométricas similares a
un pez vivo. Se decidió para este proyecto, diseñar un pez cuyo movimiento sea subcarangiforme, por lo que
el análisis que a continuación se presenta, considera solo el movimiento ondulatorio de la mitad posterior
del pez (ver sección 1.2.1 Locomoción BCF).
La expresión para la deflexión lateral de un pez nadando en modo subcarangiforme puede describirse
mediante la ecuación siguiente1:
𝑣(𝑥, 𝑡) =
𝑤
0,04
7𝑥
(0,004𝐿𝑓 − 0,02 +
) sin (𝑤𝑡 − )
2𝜋
𝐿𝑓
𝐿𝑓
EC. 1
Donde:
o
o
1
𝐿𝑓 : 𝐿𝑎𝑟𝑔𝑜 𝑑𝑒𝑙 𝑃𝑒𝑧
𝑤: 𝐹𝑟𝑒𝑐𝑢𝑒𝑛𝑐𝑖𝑎 𝑎𝑛𝑔𝑢𝑙𝑎𝑟 𝑑𝑒 𝑙𝑎 𝑐𝑜𝑙𝑎 = 2𝜋𝑓
P. Valdivia y Alvarado, K. Youcef-Toumi, Design of Machines with Compliant Bodies for Biomimetic Locomotion in Liquid
Environments. ASME Journal of Dynamic Systems,Measurement and Control , 128,P 3-13, 2006.
 0
0