2008_AI_8 - Repositorio Principal
Anuncio

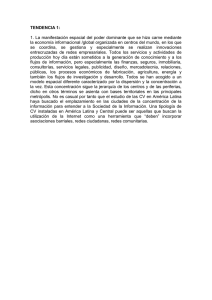
Estimación Iterativa de Movimiento No Rígido Basada en Modelos Paramétricos Juan Morales Sánchez, Rafael Verdú Monedero, José Luis Sancho Gómez Dpto. de Tecnologías de la Información y las Comunicaciones. Universidad Politécnica de Cartagena Campus Muralla de Mar. Edificio Antiguo Hospital de Marina 30202 Cartagena Teléfono: 968 32 5977 Fax: 968 32 5973 E-mail: [email protected] Resumen. La correspondencia entre estructuras deformables ha atraído gran atención en los últimos tiempos dentro del procesado de imagen y sobre todo en el campo médico. Este trabajo propone un método que aborda el problema que por naturaleza se encuentra mal condicionado utilizando una función de coste de similitud de reducido tamaño: la ambigüedad en cada mapa de similitud se describe mediante un modelo paramétrico difuso, y finalmente se lleva a cabo una interpolación difusa y espacialmente no uniforme, para transformar la información paramétrica en un conjunto de vectores de movimiento. El método obtiene la correspondencia espacial entre dos imágenes de forma global y con precisión subpixel. Los resultados del método en imágenes reales con alta deformación no lineal prueban la validez de este método. La extensión al caso volumétrico es también posible. 1. Introducción Las transformaciones necesarias para la estimación de un movimiento deformable conducen generalmente a problemas mal condicionados, de forma que se requieren restricciones adicionales para alcanzar una solución cercana a la real. Habitualmente las restricciones se contemplan incorporando al método de estimación de movimiento el conocimiento a priori sobre las características de la deformación, restringiendo así el espacio de posibles soluciones [1][2]. Para ello, la opción más utilizada son las técnicas de regularización donde se minimiza una energía potencial, que controla la deformación, junto con una función de coste que describe diferencias de la imagen. La estimación de movimiento deformable en el campo médico ha sido ampliamente tratada en la bibliografía sobre el tema [3][4], aunque sin solución definitiva al problema. Se propone aquí un método novedoso para estimar la correspondencia espacial entre pares de imágenes. El objetivo de este método es parametrizar el campo de movimiento de cada uno de los píxeles o nodos pertenecientes a una determinada rejilla uniforme definida sobre la imagen. Este ámbito de movimiento, calculado mediante una función de coste local de semejanza, incluye generalmente un área grande de varios píxeles, que representaremos a través de un modelo paramétrico difuso. Posteriormente, mediante interpolación espacial difusa y no uniforme se convierten los datos paramétricos a un sistema de referencia de vectores de movimiento (VM) que relacionan ambas imágenes con una precisión inferior al tamaño del pixel. El método es capaz de seguir altas deformaciones no lineales. 2. Estimación de Movimiento No Rígido El método propuesto consecutivas: consta de dos etapas 1. Estimación del movimiento o emparejamiento entre imágenes de forma difusa. Este paso hace uso de una función de coste de semejanza y de un bloque de comparación de tamaño muy reducido. A diferencia de los algoritmos clásicos de blockmatching, en los cuales se toman decisiones drásticas, el objetivo en este proceso es ampliar la zona de ambigüedad en la correspondencia entre píxeles, para parametrizar posteriormente la zona con el nivel de parecido más alto. En la mayoría de los casos esta zona tiene una forma de punto o de línea curva, aunque a veces el resultado es amorfo. Cada uno de estos casos conduce a un modelo paramétrico difuso diferente. 2. Regularización paramétrica difusa. Esta fase transforma la información difusa de cada pixel en un sistema de VM numéricos que emparejan perfectamente ambas imágenes. Estos VM se obtienen gracias a una interpolación espacial difusa y no uniforme, un proceso iterativo que consiste en un filtrado lineal discreto de entropía mínima, restringido por los modelos paramétricos estimados para cada pixel. 3 Estimación Difusa de Correspondencia Espacial la El objetivo de esta fase es calcular y parametrizar para cada pixel de una rejilla uniforme definida sobre la primera imagen la zona con mayor parecido en la segunda imagen. Este proceso tiene 3 claves principales: - La función de coste de semejanza, que es compromiso entre la correlación entre bloques y su diferencia. Los bloques comparados son muy pequeños (3-5 pixeles de anchura), - El resultado de la evaluación del coste es un mapa de semejanza que refleja el parecido entre ambas imágenes en la vecindad de cada pixel, - El mapa de la semejanza suele contener muchos pixeles de alto grado de parecido (todos ellos son candidatos probables); esta ambigüedad se resuelve ajustando un modelo paramétrico a dicho mapa de semejanza, cuyo resultado es una estimación difusa del movimiento. El cálculo de la correspondencia supone una clara diferencia respecto a los algoritmos clásicos de block-matching: aquí las dimensiones del bloque son muy reducidas. Esto conduce a una mayor ambigüedad en el emparejamiento espacial y, por otra parte, a un aumento de la capacidad de seguimiento del movimiento flexible. 4. Refinamiento de la Solución Difusa La fase anterior estima la deformación entre las dos imágenes como información paramétrica difusa, lo que restringe más o menos la zona de correspondencia según el modelo asociado a cada pixel. Puesto que el objetivo del problema es obtener la información espacial que relacione las imágenes de una manera directa y explícita, es necesario convertir la solución difusa en un conjunto de VM o cualquier otro tipo de soporte. La solución propuesta es utilizar un método de regularización basado en un procedimiento iterativo que combine el filtrado lineal discreto 2D [7] y la aplicación de las restricciones proyectando sobre los modelos paramétricos. Este proceso es equivalente a una interpolación espacial difusa no uniforme. La solución alcanzada, plasmada en un conjunto de VM 2D tiene dispersión mínima. Llamaremos vx(x,y) y vy(x,y) a las coordenadas de los dos VM correspondiente al pixel (x,y). 4.1. Interpolación de Baja Energía de Curvatura Algunos métodos de regularización se basan en un filtrado discreto iterativo de los VM con diversos tipos de núcleos, por ejemplo gaussianos [1]. En este trabajo se propone utilizar un núcleo que minimice la energía de curvatura de los VM, es decir su segunda diferencia. En el caso 2D, el núcleo de filtrado se define como el pseudo-inverso de la energía de la curvatura, donde aparecerá una constante que determina la frecuencia de corte del filtro paso-bajo. Cuanto más grande sea dicha constante más grande será la frecuencia de corte, y por tanto más grande la capacidad de seguir un gran movimiento deformable, pero más lenta será la velocidad del proceso. Este filtrado iterativo ha sido implementado mediante el eficiente algoritmo FFT. 4.2. Aplicación Restricciones Paramétrica de Además de la minimización de la energía de curvatura global, resultante del filtrado lineal en cada iteración y para cada pixel (x,y), se imponen a los valores de los VM de cada pixel (vx( x,y), vy(x,y)) las restricciones del modelo paramétrico correspondiente. La restricción se consigue proyectando los VM sobre el modelo para cada pixel. Dependiendo del modelo: - Si el modelo es un punto, el VM es sustituido por dicho punto de correspondencia exacta, (px, py), - Si el modelo es una línea curva, el VM que corresponda es sustituido por su proyección sobre la curva, - Si el modelo es indefinido, el VM, (vx(x,y), vy(x,y)) se mantiene sin modificación. El problema de proyectar un punto sobre una parábola tiene solución analítica, y también se puede obtener numéricamente por medio de un algoritmo del gradiente. Para el caso de otras cuádricas es inevitable la resolución de forma numérica, ya que no existen expresiones cerradas. 5. Resultados El método para estimar la correspondencia espacial entre un par de imágenes se ha probado [5] haciendo uso de una deformación sintética sobre la imagen de Lenna, así como sobre una imagen patrón (rejilla regular). La misma deformación se aplicó a ambas imágenes. En la Figura 1 se muestran los resultados alcanzados con el método propuesto. En [3] se pueden encontrar los resultados del método aplicado a determinación de contornos de movimiento sobre imágenes médicas. La imagen superior izquierda muestra el efecto de deformar artificialmente una rejilla rectangular. La misma deformación fue realizada en la imagen original de Lenna, resultado mostrado en la imagen inferior izquierda. Eligiendo la imagen de Lenna original como imagen 1 y la versión deformada como imagen 2, el método automático propuesto se aplica sobre este par de imágenes. Las imágenes de la derecha contienen los resultados alcanzados: la imagen inferior muestra el resultado de des-deformar la Lenna deformada aplicando el conjunto de vectores de movimiento proporcionados por el método, mientras que la imagen superior muestra el mismo efecto aplicado en la rejilla rectangular de test previamente deformada. En la Figura 2 (inferior) se muestran resultados similares obtenidos [6] (solamente para un plano de corte) a partir de una extensión volumétrica del método propuesto aplicado sobre dos volúmenes de datos de TAC (Tomografía Axial Computerizada), mostrados en la figura 2 (superior y medio) correspondientes a un escaneo del tórax en los puntos extremos del ciclo respiratorio (inspiración y espiración). 6. Conclusiones Figura 1. De arriba a abajo y de izquierda a derecha: Rejilla deformada sintéticamente; Lenna deformada sintéticamente; rejilla compensada con movimiento estimado; Lenna compensada con movimiento estimado. De los resultados gráficos observamos que el método proporciona una valoración exacta de la correspondencia espacial entre las dos imágenes. El método propuesto consigue una estimación de movimiento deformable con precisión subpixel. El método se ha probado con éxito en imágenes reales y con una alta deformación artificial no lineal. La extensión de este método al caso 3D es también factible como demuestran los resultados mostrados. Referencias [1] F.L. Bookstein, “Landmark methods for forms without landmarks: morphometrics of group differences in outline shape”, Medical Image Analysis, 1 (3), 1997. [2] J.P. Thirion, “Image matching as a diffusion process: an analogy with Maxwell’s demons”, Medical Image Analysis, 2 (3), 1998. [3] J. Morales, L. Weruaga, et al., “Automatic contour determination of moving volumes in the thoracic area for radiotherapy planning,”, 6th Biennial ESTRO Meeting, Sevilla (E), 2001. [4] D. Terzopoulos, “Deformable models in medical image analysis”, IEEE Computer Soc. Press, 1998. [5] J. Morales, R. Verdú, R. Berenguer, L. Weruaga, “Non-rigid motion estimation based on fuzzy models”, Proc. 14th Intl. Conf. on Digital Signal Proc, Santorini (GR), Julio 2002. [6] L. Weruaga, J. Morales, L. Núñez, and R. Verdú, “Estimating volumetric motion in human thorax with parametric matching constraints”, IEEE Trans. Medical Imaging, vol. 22, no. 6, pp. 766-772, June 2003. Figura 2. Porción renderizada del tórax humano utilizada en la fase de validación. Imagen superior: espiración; imagen media: inspiración; imagen inferior: vectores de movimiento para el sexto corte. [7] L. Weruaga, R. Verdú and J. Morales, “Frequency-based formulation of active deformable models”, accepted at IEEE Trans. Pattern Analysis and Machine Intell., August 2003.