¿Puedo tener algún problema después con el variador
Anuncio

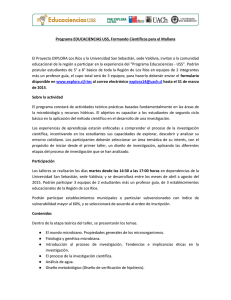
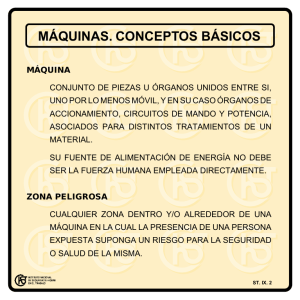
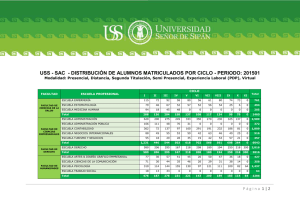
Hotline Técnica – FAQ ID: 3008 Comunicación MM4 - USS - S7-200 Aplicable a MM4, USS, S7-200 Conexión USS variador de velocidad MM4 y SINAMICS REQUERIMIENTOS Step7 MicroWin V3.2 o superior Simatic Step7 MicroWin Add On: Instruction Library V1.1 (USS + Modbus) 6ES7830-2BC00-0YX0 Cable bifilar blindado (Profibus) Resistencia de terminación de Bus (Si aplica) CABLES Y CONEXIONES ELECTRICAS Tanto el MM3 como el MM4 se comunican con un PLC S7-200 usando un cable RS-485. El MM3 se conecta usando la interfaz DB9 directamente. El MM4 y el Sinamics G110 (Versión USS) se conectan mediante terminal, P14 y P15 en MM420. P29 y P30 en MM440 y P8 y P9. Resistencia de terminación Debido a que el protocolo USS trabaja sobre RS-485 es necesario usar resistencias de terminación de bus. En caso que el equipo sea el ultimo del bus. En el caso de Micromaster: Comunicación MM4 - USS - S7-200 1/9 Hotline Técnica – FAQ ID: 3008 Las resistencias de terminación se incluyen con el equipo, la imagen conexión para MM420, en el caso de MM440 los pines 14 y 15 se cambian por pines 29 y 30 respectivamente. En caso de Sinamics G110 (USS): Es necesario poner en posición de ON los dos Dip-switch. SET DE INSTRUCCIONES MICROWIN Todas las instrucciones de protocolo USS, exceptuando READPM y WRITEPM trabajan para los drives de 4ta generación. Estas instrucciones no son funcionales en 4ta generación. Comunicación MM4 - USS - S7-200 2/9 Hotline Técnica – FAQ ID: 3008 PARAMETRIZACIÓN EN EL EQUIPO PARAMETRO P0700 = 5 P1000 = 5 P2010[0] = 6 P2011[0] = 0 a 31 P2009[0] = 0 P2012[0] = 2 P2013 [0] = 127 P2014 = 0 – 56535ms P2000 = 60 Hz DESCRIPCION Habilitacion control remoto Seleccionar Setpoint de frecuencia por USS Baud rate de USS. Ejemplo 6 = 9600 Direccion del variador en la red Denormalizacion, si se habilita el setpoint se interpreta como 100% = 4000H Si no, 4000H = 16384 se interpreta como 163.84Hz Numero de PZD Numero de PKW, 127 longitud variable Tiempo serial timeout Velocidad nominal del sistema Librerias en Step7 MicroWin con SP5 SP5 Habilita los dos puertos. Comunicación MM4 - USS - S7-200 3/9 Hotline Técnica – FAQ ID: 3008 Bloque de inicialización La señal de EN habilita el bloque. Mode = Selecciona cuando el puerto se habilita USS o PPI ( 0 = PPI / 1 =USS) Baud = “9600” La velocidad de transmisión de la red USS, debe ser el mismo que el configurado en el variador. Active = Indica que accionamientos se encuentran activos, se tiene lo siguiente: Done = Indica cuando termina proceso de iniciación. Error = Indica código de error. Comunicación MM4 - USS - S7-200 4/9 Hotline Técnica – FAQ ID: 3008 CÓDIGOS DE ERROR CÓDIGO DE ERROR 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 DESCRIPCIÓN Sin error. El accionamiento no ha respondido. Se ha detectado un error de suma de verificación en la respuesta del accionamiento. Se ha detectado un error de paridad en la respuesta del accionamiento. Una interferencia del programa de usuario ha causado un error. Se ha intentado ejecutar un comando no válido. Se ha indicado una dirección no válida del accionamiento. El puerto de comunicación no se ha ajustado para el protocolo USS. El puerto de comunicación está ocupado procesando una operación. La velocidad del accionamiento está fuera de rango. La longitud de respuesta del accionamiento no es correcta. El primer carácter de la respuesta del accionamiento no es correcto. Las operaciones USS no soportan la longitud de caracteres en la respuesta del accionamiento. No ha respondido el accionamiento correcto. La dirección DB_Ptr indicada no es correcta. El número de parámetro indicado no es correcto. Se ha seleccionado un protocolo no válido. Está activado el protocolo USS. No es posible cambiar. Se ha indicado una velocidad de transferencia no válida. Sin comunicación: el accionamiento no está activo. El parámetro o el valor en la respuesta del accionamiento no son correctos o contienen un código de error. Se ha devuelto un valor de palabra doble, en vez del valor de palabra solicitado. Se ha devuelto un valor de palabra, en vez del valor de palabra doble solicitado. Comunicación MM4 - USS - S7-200 5/9 Hotline Técnica – FAQ ID: 3008 USS_CRTL La instrucción sirve para controlar un accionamiento MicroMaster activo. Esta operación deposita en un búfer de comunicación los comandos seleccionados. El búfer se envía después al accionamiento direccionado (parámetro "Drive"), si éste se ha seleccionado en el parámetro "Active" de la operación USS_INIT. Algunos accionamientos indican la velocidad sólo como valor positivo. Si la velocidad es negativa, el accionamiento indicará la velocidad como valor positivo, pero invertirá el bit D_Dir (bit de sentido). El bit EN deberá estar puesto a 1 para poder activar la operación USS_CTRL. RUN (RUN/STOP) indica si el accionamiento está ON (1) u OFF (0). Para que el accionamiento se pueda poner en marcha, se deberán cumplir los siguientes requisitos: - DRIVE deberá estar seleccionado como ACTIVE en USS_INIT. - OFF2 y OFF3 deberán estar puestos a 0. Comunicación MM4 - USS - S7-200 6/9 Hotline Técnica – FAQ ID: 3008 Las salidas FAULT e INHIBIT deberán estar puestas a 0.Si está desactivado el bit RUN, el accionamiento MicroMaster recibirá un comando para que disminuya la velocidad hasta que pare el motor. El bit OFF2 sirve para que el accionamiento MicroMaster pueda parar por inercia. El bit OFF3 le ordena al accionamiento MicroMaster que pare rápidamente. El bit F_ACK indica que se ha detectado un fallo en el accionamiento. El accionamiento borra el fallo ("Fault") cuando el estado de señal de "F_ACK" cambia de "0" a "1". El bit DIR (Sentido) indica en qué sentido debe girar el accionamiento. La entrada Drive (Dirección del accionamiento) es la dirección del accionamiento MicroMaster a la que se debe enviar el comando USS_CTRL. Direcciones válidas: 0 a 31 La entrada Type (Tipo de accionamiento) selecciona el tipo de accionamiento. Si utiliza un accionamiento MicroMaster 3 (o anterior), ajuste "Type" a "0". Si utiliza un accionamiento MicroMaster 4, ajuste "Type" a "1". Speed_SP (consigna de velocidad) representa la velocidad del accionamiento indicada como porcentaje de la velocidad máxima. Si "Speed_SP" es un valor negativo, se invertirá el sentido de giro del accionamiento. Rango: -200,0% a 200,0% Fault representa el estado del bit de fallo (0 = sin fallo, 1 = fallo). Para borrar el bit Fault, corrija el fallo y active el bit F_ACK. Inhibit indica el estado del bit de desactivación del accionamiento (0 = activado, 1 = desactivado). Para borrar el bit de desactivación, el bit Fault deberá estar puesto a 0 (OFF) y las entradas RUN, OFF2 y OFF3 también deberán estar desactivadas. - D_Dir representa el sentido de giro del accionamiento. Run_EN indica si el accionamiento está en marcha (1) o parado (0). Speed representa la velocidad del accionamiento indicada como porcentaje de la velocidad máxima. Rango: -200,0% a 200,0% Status es el valor sin procesar de la palabra de estado que envía el accionamiento. El diagrama siguiente muestra los bits de estado de la palabra de estado estándar y de la realimentación principal. Error es un byte de error que contiene el resultado de la última petición de comunicación con el accionamiento. El bit Resp_R (Respuesta recibida) confirma que se ha recibido una respuesta del accionamiento. Todos los accionamientos activos ("Active") se muestrean para recoger las informaciones de estado más recientes. Cada vez que el S7-200 recibe una respuesta del accionamiento, el bit "Resp_R" se activa durante un ciclo, actualizándose todos los valores. Comunicación MM4 - USS - S7-200 7/9 Hotline Técnica – FAQ ID: 3008 OPERACIONES DE LECTURA El protocolo USS incluye tres operaciones de lectura: - La operación USS_RPM_W (puerto 0) o USS_RPM_W_P1 (puerto 1) lee un parámetro de palabra sin signo. - la operación USS_RPM_ D (puerto 0) o USS_RPM_D_P1 (puerto 1) lee un parámetro de palabra doble sin signo. - La operación USS_RPM_R (puerto 0) o USS_RPM_R_P1 (puerto 1) lee un parámetro de número real (en coma flotante).Sólo puede estar activada una operación de lectura (USS_RPM_x) o de escritura (USS_WPM_x) a la vez. - La operación finaliza cuando el accionamiento MicroMaster confirma que ha recibido el comando, o bien cuando se detecta un error. El bit EN deberá estar puesto a "1" para poder transmitir una petición, debiendo permanecer activado hasta que se active el bit "Done", lo que indica que ha finalizado el proceso. Por ejemplo, una petición USS_RPM_x se transmite al accionamiento MicroMaster en cada ciclo, en caso de estar activada la entrada XMT_REQ. La entrada Drive es la dirección del accionamiento MicroMaster a la que se debe enviar el comando USS_RPM_x. Param representa el número de parámetro. Index es el valor del índice del parámetro a leer. Value es el valor del parámetro devuelto. La dirección del búfer de 16 bytes se le debe suministrar a la entrada DB_Ptr. La salida Done se activa una vez finalizada la operación USS_RPM_x. El byte de salida Error y la salida Value contienen el resultado de ejecución de la operación. Comunicación MM4 - USS - S7-200 8/9 Hotline Técnica – FAQ ID: 3008 OPERACIONES DE ESCRITURA El protocolo USS incluye tres operaciones de escritura: - La operación USS_ WPM_W (puerto 0) o USS_ WPM_W_P1 (puerto 1) escribe un parámetro de palabra sin signo. - la operación USS_ WPM_D (puerto 0) o USS_ WPM_D_P1 (puerto 1) escribe un parámetro de palabra doble sin signo. - La operación USS_ WPM_R (puerto 0) o USS_ WPM_R _P1 (puerto 1) escribe un parámetro de número real (en coma flotante).Sólo puede estar activada una operación de lectura (USS_RPM_x) o de escritura (USS_WPM_x) a la vez. El bit EN deberá estar puesto a "1" para poder transmitir una petición, debiendo permanecer activado hasta que se active el bit "Done". Cuando se activa la entrada EEPROM, la operación escribe tanto en la RAM como en la EEPROM del accionamiento. Cuando se desactiva la entrada EEPROM, la operación escribe sólo en la RAM. La entrada Drive es la dirección del accionamiento MicroMaster a la que se debe enviar el comando USS_WPM _x. Index es el valor del índice del parámetro a escribir. Value es el valor del parámetro a escribir en la memoria RAM del accionamiento. La salida Done se activa una vez finalizada la operación USS_WPM_x. El byte de salida Error contiene el resultado de ejecución de la operación. Comunicación MM4 - USS - S7-200 9/9