Superficies Minimales
Anuncio

Superficies Minimales
Pascual Lucas
Conferencia impartida el 18/02/99 en el curso
“La Historia de las Matem áticas
y su aplicación a la docencia en Ense ñanza Secundaria”
Índice General
1
I NTRODUCCI ÓN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3
2
LA
. . . . . . .
6
. . . . . . . . . . . . . .
6
ETAPA DE DESARROLLO DE LAS SUPERFICIES MINIMALES
2.1 L OS
2.2 E L
EXPERIMENTOS F ÍSICOS DE
PRINCIPIO F ÍSICO QUE HAY DETR ÁS DE LAS PEL ÍCULAS DE JAB ÓN
2.3 P ROPIEDADES
2.4 L A
P ROPIEDADES
4
10
. . . . . . . . . . . . . . . . . . . .
12
. . . . . . . . . .
14
DE JAB ÓN DE CURVATURA CONSTANTE
FÍSICAS Y TOPOL ÓGICAS DE LAS SUPERFICIES MINIMALES
3.1 S UPERFICIES
EXPERIMENTOS DE
A LGUNAS
SUPERFICIES MINIMALES
16
. . . . . . . . . . . . . . . .
16
. .
17
. . . . . . . . . . . . . . . . . . . . . .
22
ESTABLES E INESTABLES
3.2 L OS
8
. . . . .
EXTREMALES DE LAS PELÍCULAS DE JAB ÓN
SUPERFICIE DE SEPARACIÓN
2.5 P EL ÍCULAS
3
P LATEAU
P LATEAU
CON COLUMNAS DE LÍQUIDOS
4.1 E L
CATENOIDE
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
22
4.2 E L
HELICOIDE
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
23
. . . . . . . . . .
23
4.3 R ELACI ÓN
ENTRE EL CATENOIDE Y EL HELICOIDE
1
5
4.4 L A
SUPERFICIE DE
E NNEPER . . . . . . . . . . . . . . . . . . . . . .
24
4.5 L A
SUPERFICIE DE
C ATALAN . . . . . . . . . . . . . . . . . . . . . .
25
4.6 E L
ONDULOIDE
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
26
. . . . . . . . . . .
28
R EALIZACIONES
F ÍSICAS DE SUPERFICIES MINIMALES
5.1 L A
REALIZACI ÓN F ÍSICA DE UN HELICOIDE
. . . . . . . . . . . . . .
28
5.2 L A
REALIZACI ÓN F ÍSICA DE UN CATENOIDE
. . . . . . . . . . . . . .
31
. . . . . . . . . .
33
5.3 L AS
SUPERFICIES MINIMALES EN LA NATURALEZA
2
1.
I NTRODUCCI ÓN
Vamos a introducirnos en la atmósfera de una de las ramas más importantes
de las matemáticas modernas, el cálculo de variaciones multidimensional. La
teorı́a de superficies minimales, que tuvo su origen en las investigaciones de
matemáticos e ingenieros mecánicos de los siglos XVIII y XIX, se desarrolla actualmente bajo el paraguas del cálculo de variaciones. El desarrollo original
de esta teorı́a está indisolublemente ligado a la personalidad de los especialistas que se vieron involucrados en esta investigación, ası́ como a las demandas
históricas que condujeron al rápido crecimiento de la teorı́a, con sus especı́ficas
aplicaciones a problemas de la mecánica y la fı́sica.
En el cálculo variacional moderno es usual distinguir entre el caso unidimensional y el caso multidimensional. El caso unidimensional está reservado
al estudio de funcionales definidos, por ejemplo, sobre curvas diferenciables (t)
en una variedad riemanniana. Los clásicos ejemplos de estos funcionales son el
funcional longitud L y energı́a E , que están definidos por las siguientes fórmulas:
Z
L( ) = j 0 (t)jdt
E ( ) =
Z
j 0 (t)j2 dt
Los puntos extremos de estos funcionales son ciertas curvas definidas en la
variedad. Por ejemplo, los puntos extremos del funcional L son las curvas
geodésicas parametrizadas por cualquier parámetro, mientras que los puntos
extremos del funcional energı́a son las geodésicas parametrizadas por su parámetro
natural, es decir, el parámetro longitud de arco, medido a partir de un cierto
punto fijo de la curva.
En muchos problemas de la fı́sica y la mecánica surgen importantes funcionales que están definidos sobre superficies y otros objetos multidimensionales,
por ejemplo, el espacio de las superficies con frontera prefijada. Un ejemplo
importante es el funcional área que asocia a cada una de estas superficies su
área. Otro ejemplo muy relacionado con el anterior es el funcional de Dirichlet,
cuya definición se proporcionará más adelante. La relación entre el funcional
área y el funcional de Dirichlet es muy similar a la conocida relación entre los
funcionales longitud y energı́a. En este sentido, los funcional área y de Dirichlet
se pueden denominar funcionales 2-dimensionales.
El estudio sistemático de los funcionales unidimensionales está ligado al gran
matemático Leonhard Euler (1707–1783). Los intereses de Euler fueron muy
variados, y su herencia matemática es enorme. Escribió más de 850 libros
y artı́culos de investigación, y un inmenso número de cartas, muchas de las
cuales pueden ser consideradas verdaderos trabajos de investigación.
3
En la historia de la geometrı́a diferencial se asume que en 1760 Euler descubrió una nueva rama de las matemáticas, al combinar la geometrı́a pura y
los métodos variacionales diferenciales. Particularmente interesante es su obra
Methodus inveniendi lineas curvas maximi minimive proprietate gaudentes (1744),
en la cual proporciona métodos para encontrar la solución a problemas isoperimétricos, e investiga las propiedades geométricas de ciertas curvas notables,
en particular, la catenaria. Esta obra es la primera dedicada al cálculo de variaciones y en ella Euler descubre que el catenoide (la superficie de revolución
obtenida al girar una catenaria) es una superficie minimal. En 1760 publicó, en
la revista Histoire de l’Académie des Sciences, el artı́culo Recherches sur la courbure des surfaces (Investigaciones sobre la curvatura de las superficies), y casi
inmediatamente después, J.L. Lagrange (1736–1813), todavı́a un joven profesor
en la Universidad de Turı́n, publica en 1762 su conocida obra sobre el “método
de variación”, pero que Euler denominará “cálculo de variaciones”.
Habitualmente se reconoce que la teorı́a de superficies minimales comenzó
con el célebre artı́culo de Lagrange titulado Essai d’une nouvelle méthode pour
déterminer les maxima et les minima des formules intégrales indéfinies (Ensayo
de un nuevo método para determinar los máximos y los mı́nimos de las fórmulas
dadas por integrales indefinidas, 1762). Como un ejemplo de sus técnicas, Lagrange proponı́a el problema de encontrar la superficie de menor área, en la
forma z = f (x; y ), que está limitada por una curva dada. Encontró que una
condición necesaria para que la función f fuese un mı́nimo del funcional área
consistı́a en que f debı́a satisfacer la siguiente ecuación diferencial en derivadas
parciales:
(1 + fy2)fxx + 2fx fy fxy + (1 + fx2 )fyy = 0;
donde, como es habitual, los subı́ndices indican derivadas parciales. Lagrange
señala que el plano es una solución trivial y que debe haber una solución no
trivial de la ecuación. La ecuación anterior se suele denominar ecuación de Lagrange o ecuación de Euler-Lagrange, y sus soluciones se conocen con el nombre
de superficies minimales.
Es importante señalar que Lagrange nunca tuvo una actitud benevolente hacia la geometrı́a diferencial. En una carta a d’Alembert en 1772, le comenta:
¿No le parece que la Geometrı́a Sublime tiende a ser un poco decadente?
Parece bastante probable que Lagrange trataba los problemas geométricos únicamente como ejemplos e ilustraciones sobre las aplicaciones que podı́an tener los
métodos analı́ticos que habı́a descubierto.
La siguiente etapa importante en el desarrollo de la teorı́a de las superficies
4
minimales se debe a Gaspard Monge (1746–1818), que dedicó muchas de sus
energı́as al estudio de problemas relativos al cálculo de variaciones. El trabajo
básico de Monge en geometrı́a diferencial, que generalizaba tanto sus propios
trabajos como los de otros matemáticos de finales del siglo XVIII, es Application d’analyse à la géometrie (Aplicaciones del análisis a la geometrı́a, 1809), que
está dedicado parcialmente al cálculo de variaciones y a la teorı́a de superficies
minimales.
Al comienzo de su libro, Monge desarrolla la teorı́a general de curvas y superficies. En particular, analiza las propiedades de las dos curvaturas principales
en un punto arbitrario de la superficie. Trabajando con las radios de curvatura
demuestra que son iguales y opuestos en signo. Por tanto, la curvatura media de
la superficie es cero y la superficie es minimal. En particular, Monge señala la
siguiente propiedad: si está acotada por una curva cerrada, entonces cualquier
otra superficie acotada por la misma curva tiene mayor área. Monge no pareció interesado en el problema de encontrar ejemplos concretos de superficies
minimales, aparte de los ya conocidos (catenoide y helicoide).
Algunos tópicos de la teorı́a de superficies minimales fueron desarrollados
por J.B. Meusnier, que fue discı́pulo de Monge. Tenı́a sólo 22 años cuando presenta, ante la Academia, su obra Mémoire sur la courbe des surfaces (Memoria
sobre la curvatura de las superficies, 1776), donde presta bastante atención a las
superficies minimales. En ella Meusnier encuentra numerosas propiedades de
los primeros ejemplos no triviales de superficies minimales (catenoide y helicoide). Meusnier también prueba, pero mediante procedimientos geométricos y no
analı́ticos, que la ecuación de Lagrange es equivalente al hecho que la curvatura
media H = (1=2)(1 + 2 ) es idénticamente cero, donde 1 y 2 son las curvaturas
principales de la superficie.
Otro de los discı́pulos de Monge que también aportarı́a su grano de arena a la
teorı́a de superficies minimales serı́a S. Poisson (1781–1840). Como su maestro,
Poisson estuvo interesado en las aplicaciones delas matemáticas a la mecánica y
la fı́sica. En particular, sus investigaciones en la teorı́a de lı́quidos y efectos capilares fue un ı́mpetu para el desarrollo de la teorı́a matemática de la superficie
de separación entre dos medios. Sus contribuciones a la teorı́a de las superficies minimales tampoco son desdeñables, y quizás habrá tiempo de comentar
algunos resultados notables.
5
2.
L A ETAPA DE DESARROLLO DE LAS SUPERFICIES MINIMA LES
2.1.
L OS
EXPERIMENTOS F ÍSICOS DE
P LATEAU
Antes de poner algunos ejemplos matemáticos de superficies minimales, vamos
a exponer algunos ejemplos y propiedades que pueden ser demostrados en el
lenguaje de la geometrı́a visual. Cuando el profesor belga Joseph Plateau (1801–
1883) comenzó sus experimentos acerca del estudio de la configuración de las
pelı́culas de jabón, difı́cilmente podı́a imaginar que sus trabajos servirı́an para
desarrollar y potenciar una nueva rama de las matemáticas, y de las ciencias
en general, que ha crecido sin parar hasta el presente, y que conocemos, en su
honor, como el “problema de Plateau”.
El problema de encontrar una superficie de menor área con frontera prefijada
fue denominada, parece ser, el “problema de Plateau” por el gran matemático Lebesgue en su conocido trabajo Intégrale, longueur, aire (Intregral, longitud, área,
1902). Algunos de los experimentos fı́sicos atribuidos a Plateau son extremadamente sencillos y, seguramente, serán conocidos por todos, pues es difı́cil de
creer que haya alguien que en su niñez (o quizás en su juventud, e incluso después) no haya nunca jugado a construir pompas de jabón. Es bien conocido que
si introducimos un aro metálico en agua jabonosa y lo removemos con cuidado,
entonces se forma una pelı́cula de jabón cuyo contorno es, precisamente, el aro.
El tamaño de la pelı́cula de jabón puede ser grande, pero sabemos por propia
experiencia que cuanto mayor sea su tamaño más fácil es que, por la acción de
la gravedad, se rompa. Por el contrario, si su tamaño es muy pequeño, entonces las fuerzas gravitatorias pueden omitirse a la hora de realizar un estudio
detallado de estas superficies de jabón.
Las superficies minimales son objetos matemáticos que pueden modelarse
bastante satisfactoriamente utilizando pompas de jabón. Recı́procamente, muchas propiedades profundas de las superficies minimales se nos muestran de
forma visual en simples experimentos fı́sicos con las pelı́culas de jabón.
En esta sección vamos a ilustrar, como ejemplos muy sencillos, algunas nociones, técnicas y resultados básicos relativos al problema de Plateau. A pesar
de que podemos correr el riesgo de hacer una exposición poco exacta o rigurosa,
vamos a omitir todo el aparato matemático necesario, y nos vamos a centrar en
construcciones visuales.
En el siglo
XVIII,
Euler y Lagrange ya dedicaron muchos esfuerzos al estu-
6
dio de estas superficies. Posteriormente, Monge, Legendre, Ampére, Björling,
Riemann, Schwarz y Weierstrass encontrarı́an soluciones exactas para ciertos
contornos. La teorı́a de las superficies minimales surgió del estudio de dos clases
de pelı́culas de jabón: las pompas de jabón y las pelı́culas de jabón propiamente dichas. Las pompas de jabón se caracterizan porque han sido construidas
y mantenidas en equilibrio por la presión interna del gas (aire) atrapado en su
interior. La forma esférica de la pompa se justifica fácilmente por el hecho de
que esta forma garantiza la menor área de la superficie para un volumen fijo, el
encerrado por la pompa.
Figure 1
Un método sencillo de construir pompas de jabón es el siguiente. Se toma
un aro metálico, se sumerge en agua jabonosa hasta que se forme una pelı́cula
de jabón. Entonces se saca del agua y se desplaza rápidamente en el espacio,
siguiendo una dirección perpendicular al plano del aro. La pelı́cula de jabón se
deforma por el efecto de la presión del aire, y varias pompas de jabón pueden
formarse. Lógicamente, el mismo efecto se consigue si soplamos la pelı́cula de
jabón que se ha formado en el aro (ası́ nos evitamos tener que correr).
Figure 2
7
Otra forma de obtener pelı́culas de jabón consiste en construir contornos cerrados de alambre (no necesariamente planos ni circulares), sumergirlos en agua
jabonosa y extraerlos. Entonces se forma una pelı́cula de jabón estable, que normalmente no posee pompas de jabón en su estructura (las cuales se forman por
la diferencia de presión). Esta superficie estable tiene el alambre original como
su contorno o frontera. Este tipo de pelı́culas de jabón son las más interesantes
matemáticamente, debido a que en numerosos problemas aplicados, la superficie minimal está asociada a alguna frontera fija, como ocurre por ejemplo en la
teorı́a de membranas.
2.2.
EL
PRINCIPIO F ÍSICO QUE HAY DETR ÁS DE LAS PEL ÍCULAS DE JAB ÓN
El principio fı́sico que hay detrás de la formación de las pelı́culas de jabón, y
que regulan su comportamiento y sus propiedades tanto locales como globales,
es extremadamente simple: un sistema fı́sico conserva su configuración si no
puede fácilmente alterarla para ocupar otra posición con menos energı́a, es decir, el principio de mı́nima energı́a. En nuestro caso, la energı́a de la superficie
determinada por la pelı́cula de jabón, a veces descrita en términos de la tensión
superficial del lı́quido, se origina por la existencia de fuerzas atractoras entre
las moléculas y el desajuste o desequilibrio de estas fuerzas sobre la frontera de
la superficie. La existencia de estas fuerzas desequilibradas origina un curioso
efecto: la pelı́cula de jabón se transforma en una superficie elástica que trata
de minimizar su área y, por tanto, minimizar la energı́a-tensión por unidad de
área. En este razonamiento despreciamos el efecto de la fuerza de la gravedad
(en el caso de pompas y pelı́culas con frontera) y de la presión del aire (en el caso
de pelı́culas sin frontera).
Consideremos con detalle las propiedades de la superficie del lı́quido jabonoso, cuando añadimos jabón al agua. En la siguiente figura representamos
esquemáticamente la superficie de separación entre dos medios (materiales), el
agua y el aire.
8
Figure 4
Las moléculas de agua se representan por pequeños cı́rculos negros (algunas
de ellas estarán en el aire por efecto de la evaporación, pero las despreciamos),
y las fechas dobles denotan las fuerzas mutuas de atracción actuando sobre
moléculas polares de agua. Es claro que estas fuerzas son las causantes de la
existencia de la tensión superficial en la superficie de separación entre ambos
medios. Las propiedades de la superficie del lı́quido se forman exactamente de
esta manera.
Figure 5
En contraste con las moléculas de agua, las moléculas de jabón están constituidas por largas y estrechas cadenas de carbono con un grupo final rico en
oxı́geno. Cuando estas moléculas son añadidas al agua, se desplazan a la superficie y se distribuyen homogéneamente. Mientras tanto, cada molécula de
jabón de la superficie se orienta con su final no polar hacia fuera. Al remover las
moléculas de agua en el lı́quido, las moléculas de jabón disminuyen la tensión
superficial de la superficie de separación. Esta circunstancia proporciona más
elasticidad a la superficie, que se manifiesta por ejemplo cuando introducimos
9
el aro de alambre en el lı́quido jabonoso, lo removemos y lo sacamos inmediatamente. Se forma una pelı́cula de jabón cuyo contorno es el alambre. La fuerza
gravitatoria limita el tamaño de la superficie minimal, y cuando algunas partes de la pelı́cula de jabón están muy distanciadas del alambre, la pelı́cula de
jabón se destruye, ya que las fuerzas de tensión superficial son insuficientes
para mantener la pelı́cula en equilibrio.
2.3.
P ROPIEDADES
EXTREMALES DE LAS PELÍCULAS DE JAB ÓN
Debido al proceso descrito anteriormente, un modelo matemático que describa
una pelı́cula de jabón puede denominarse “superficie minimal”, en el sentido
que es una superficie que tiene la menor área posible (localmente) entre todas
las superficies con la misma frontera. Está bastante claro que la forma de una
superficie y sus propiedades están, en gran medida, determinadas por la configuración de su frontera.
El concepto de mı́nima área fue introducido, parece ser, por Arquı́medes,
que no sólo observó que las lı́neas rectas minimizaban la longitud entre dos
puntos, sino que los planos podı́an caracterizarse en términos de minimizar la
superficie. Estas ideas aparecen de forma natural en nuestra vida cotidiana,
por ejemplo cuando intentamos construir un tambor estirando la piel. Esto
permite relacionar la tensión superficial con las propiedades de las superficies
que localmente minimizan el área.
El siguiente éxito en el desarrollo de estas ideas (después de un largo parón)
se debió a Boyle, que en 1676 se mostró interesado en la forma que adquirı́an
las gotas de un lı́quido. Se fijó en que las gotas de lluvia eran aproximadamente
esféricas y esto le dio una idea para imaginar un experimento curioso. Para
estudiar el comportamiento de las gotas de agua durante un largo tiempo y
evitar su destrucción, Boyle mezcló dos lı́quidos en un recipiente: una solución
de K2 CO3 (un lı́quido denso y pesado, una solución concentrada de carbonato
potásico) y alcohol (un lı́quido ligero). Cuando los lı́quidos se dejan reposar, se
forma nı́tidamente una superficie de separación entre ambos lı́quidos.
10
Figure 7
Entonces una gota de un tercer lı́quido de densidad intermedia entre los dos
lı́quidos anteriores e inmiscible con los otros dos lı́quidos se introduce en el
recipiente y se coloca en la superficie de separación. La gota se mantiene en
equilibrio, sumergiéndose en el alcohol y siendo tangente en un punto a la superficie de K2 CO3 . Este lı́quido (por ejemplo, aceite) se ha escogido para no
perturbar o modificar la superficie de separación y para que no se deforme a lo
largo de la superficie de separación, como se indica en la siguiente figura.
Figure 8
Sobre la superficie de separación se colocan gotas de distintos tamaños, y
vamos observando que la forma de las gotas va cambiando conforme vamos
aumentando el tamaño de las mismas. Van dejando de ser esféricas y se van
achatando cada vez más debido a la fuerza de la gravedad; ciertamente, como
hoy sabemos, la deformación de las gotas se produce siempre, incluso cuando
el tamaño de las gotas es muy pequeño. Lo que ocurre es que puede ser imperceptible al ojo humano. Sin embargo, para darnos cuenta de esto es preciso
disponer de instrumentos de gran precisión, que desafortunadamente no poseı́a
11
Boyle. Por otra parte debemos recordar que las ideas acerca de la necesidad de
que la forma de las gotas debı́a corresponder con superficies de mı́nima energı́a
estaban en su niñez en el siglo XVII. Además, la forma de una gota de agua realmente minimiza la energı́a superficial bajo la acción de la fuerza de la gravedad,
la cual complica enormemente el tratamiento matemático.
En 1751 Segner llegó a una planteamiento claro de este hecho fı́sico y comprendió que, para un estudio riguroso de la tensión superficial, era necesario
eliminar la influencia de la fuerza gravitatoria. Estudió las gotas en caı́da libre y
las gotas situadas en un lı́quido de la misma densidad. Las gotas y el lı́quido se
escogı́an para ser inmiscibles. Demostró que la esfera tenı́a la menor área entre
todas las superficies cerradas acotando un volumen fijo. Parece ser que Segner
fue el primero que comprendió el verdadero papel de la tensión superficial en
todos estos procesos.
2.4.
LA
SUPERFICIE DE SEPARACI ÓN
Un paso importante para comprender la geometrı́a interior de las superficies de
separación entre dos lı́quidos fue dado por Poisson en 1828, cuando probó que
la superficie de separación (despreciando los efectos producidos por la fuerza de
gravedad) tenı́a curvatura media constante.
Consideremos un punto P en la superficie y consideremos coordenadas cartesianas x, y en el plano tangente a la superficie en P , y escojamos la coordenada
z en la dirección del normal de la superficie en dicho punto. Entonces la superficie puede ser localmente parametrizada por r (x; y ) = (x; y; f (x; y )), donde f (x; y )
es una función diferenciable cuyo grafo es, precisamente, la superficie.
Figure 9
12
Entonces puede probarse que la curvatura media en
H (P ) =
P
viene dada por
@2f @2f
+
= f
@x2 @y2
Para relacionar la curvatura media con la tensión superficial es conveniente que
recordemos otra interpretación del operador laplaciano.
Si f (x1 ; : : : ; xn ) una función diferenciable, definimos la r -media de
sigue:
Z
Fr f (x) =
f
como
1
vol(Sr ) Sr f
donde Sr es la esfera (n , 1)-dimensional de radio r con centro el punto x. En
otras palabras, hacemos la media de la función f a lo largo de la esfera Sr .
Definimos ahora la desviación de f respecto de su r -media:
r f (x) = f (x) , Fr f (x)
y consideramos la función
g(x) = rlim
!0 r f (x)
Se demuestra que dicha función coincide, salvo un múltiplo, con la laplaciano
de f , f (x).
Volvamos a analizar la curvatura media. Entonces H (P ) = fxx + fyy = f
puede interpretarse como la desviación del radio vector de la superficie de su
media local en la dirección del normal. Supongamos que la superficie es la
frontera de separación entre dos medios y que las fuerzas de atracción actúan
sobre puntos cercanos, como en el ejemplo de las moléculas de agua que hemos
comentado anteriormente (podemos imaginar, para mayor claridad, que estamos
trabajando con pelı́culas de jabón). Entonces la siguiente cadena de igualdades
puede escribirse: la presión sobre la superficie en el punto P coincide con la
proyección sobre la recta normal a la superficie en P de la resultante de las
fuerzas atractivas locales entre los puntos cercanos a P , que a su vez coincide
(salvo un factor) con la desviación del radio vector de su media local (desviación
en la dirección del normal). Por tanto, la presión en el punto P coincide con
una cierta constante multiplicada por la curvatura media de la superficie en ese
punto. Podemos escribir la igualdad
H = (p1 , p2 );
donde p1 y p2 indican las presiones de los medios separados por la superficie
entre ellos, y 1= es la tensión superficial. Por tanto, el resultado que anunciábamos anteriormente se satisface: si una superficie es un pompa de jabón, o
un sistema de pompas de jabón, o la frontera de separación entre dos lı́quidos
de la misma densidad, etc., entonces suponiendo que la superficie está en equilibrio la presión en ambos lados de la superficie es una función constante, es
13
decir, no depende del punto. Por tanto, la curvatura media de la superficie es
constante.
2.5.
P EL ÍCULAS
DE JAB ÓN DE CURVATURA CONSTANTE
Habiendo descubierto que las pelı́culas de jabón o “superficies lı́quidas” son
superficies de curvatura constante, Poisson se planteó el problema de encontrar
una descripción completa de este tipo de superficies. Como el problema de las
formas posibles de las gotas de un lı́quido, o pequeñas pompas, no ha sido
todavı́a completamente resuelto, los investigadores se centraron en el caso de las
superficies de curvatura media positiva. Es obvio que la esfera euclı́dea estándar
pertenece a esa familia y que las pompas o gotas de lı́quidos adaptan esta forma.
Sin embargo, permanecı́a sin resolver el problema de saber si existı́an otras
superficies cerradas de curvatura media positiva.
Aunque nos puede parecer que los numerosos experimentos fı́sicos con pompas justifican que la esfera es la única superficie de curvatura constante positiva
dentro de la familia de las superficies diferenciables cerradas, una demostración
matemática de este hecho requiere algo más de esfuerzo.
Poisson demostró que en la familia de los ovaloides que se aproximan a una
esfera y son superficies de revolución, la esfera es la única superficie de curvatura media constante. Esta fue la única información hasta 1853, cuando Jellet
probó que entre las superficies estrelladas cerradas, la esfera era la única que
poseı́a curvatura media constante positiva. Ya en nuestro siglo, se ha demostrado que una superficie compacta, sin autointersecciones, con curvatura media
constante, es una esfera usual.
Recordemos ahora los dos hechos que hemos obtenido: si una pelı́cula de
jabón encierra un volumen cuya presión interior excede la presión exterior,
entonces la superficie tienen curvatura media positiva; si, por el contrario, la
pelı́cula de jabón no encierra un volumen, entonces no existen diferencias de
presión a ambos lados de la pelı́cula, por lo que la curvatura media es cero. Los
primeros experimentos fundamentales de Plateau iban destinados a estudiar
las propiedades de las superficies de separación entre dos lı́quidos. Los experimentos fueron realizados con dos lı́quidos de la misma densidad; al sumergir
uno en el otro se producı́an gotas acotadas por superficies de curvatura constante positiva. También fue posible construir pelı́culas de jabón con frontera o
contorno. Estas pelı́culas podı́an ser descritas mediante las siguientes propiedades equivalentes: (1) superficies de curvatura media cero; (2) superficies que
minimizaban el área, es decir, superficies minimales, (3) superficies cuyas cur14
vaturas principales eran, en todo punto, iguales en valor absoluto y opuestas en
signo.
15
3.
P ROPIEDADES F ÍSICAS Y TOPOL ÓGICAS DE LAS SUPERFI CIES MINIMALES
3.1.
S UPERFICIES
ESTABLES E INESTABLES
Incluso los más simples experimentos prueban que diferentes superficies de
separación entre dos medios reaccionan de forma distinta frente a la más leve modificación o alteración. Algunas de ellas se oponen a la destrucción y
se demuestran estables, otras por el contrario muestran tendencias “suicidas”,
convirtiéndose en inestables. De la comparación y estudio de ambas situaciones
se puede deducir un efecto importante, que puede ser visualmente ilustrado a
través de una función escalar.
El estudio del comportamiento local de una función diferenciable está fuertemente ligado al análisis de sus puntos crı́ticos, es decir, aquellos puntos que
son ceros del vector gradiente. Estos puntos pueden ser de varios tipos. Imaginemos que tenemos una función f (x; y ) de dos variables, entonces los puntos
crı́ticos pueden extremos, es decir, máximos o mı́nimos. Pero existe un tercer
tipo de punto más interesante, son los llamados puntos de silla, como el que se
muestra en la siguiente figura.
Punto de Silla
Este tipo de puntos está caracterizado por tener dos clases especiales de direcciones: a lo largo de la dirección a, la función es estrictamente creciente,
mientras que a lo largo de la dirección b, la función es estrictamente decreciente.
Una situación totalmente análoga sucede cuando consideramos funcionales
definidos sobre un espacio de dimensión infinita. Tal espacio (sin las formula16
ciones precisas que son necesarias para definirlo con rigor) es el conjunto de
todas las superficies en el espacio euclı́deo tridimensional. Entonces el funcional área asocia a cada superficie su área. Si la superficie (pelı́cula de jabón)
está en equilibrio, esto significa que, considerada la superficie como un punto
del anterior espacio, entonces es un punto crı́tico del funcional área. Igual que
ocurrı́a antes, el punto crı́tico puede ser máximo, mı́nimo o un punto de silla.
Durante la realización de los experimentos con pelı́culas de jabón descubrimos que los mı́nimos locales son puntos estables, es decir, se oponen a las
pequeñas perturbaciones, regresando a la posición de equilibrio original. En
el caso de los puntos de silla, las pelı́culas de jabón son inestables y existen
perturbaciones, arbitrariamente pequeñas, que minimizan el área y conducen a
una deformación espontánea de la superficie, que adquiere una nueva configuración correspondiente a una energı́a menor. Además, la nueva configuración
puede ser distinta de la original, incluso desde el punto de vista topológico. Como el espacio es de dimensión infinita, debemos entender que existen infinitas
maneras, o infinitas direcciones, de perturbar nuestra superficie.
3.2.
L OS
EXPERIMENTOS DE
P LATEAU
CON COLUMNAS DE L ÍQUIDOS
Comentemos a continuación algunos de los experimentos que realizó Plateau.
Entre dos discos metálicos del mismo radio, cuyos centros se encuentran sobre
la recta perpendicular a los discos, Plateau obtenı́a una columna de lı́quido que
adquirı́a la forma de un cilindro circular recto.
Figure 11
Como la frontera de un cilindro es una superficie de curvatura media constante, entonces teóricamente dicha columna de lı́quido es un punto crı́tico en
el espacio de “todas las superficies”. En este caso, no estamos considerando
17
superficies cerradas, compactas y diferenciables de curvatura media constante positiva, pues entonces el único punto crı́tico serı́a la esfera. Sabemos que
un cilindro no es una superficie compacta (ya que puede ser extendida indefinidamente en ambas direcciones). Sin embargo, si consideramos un trozo de
cilindro, acotado por dos discos, entonces se convierte en una superficie diferenciable cerrada con frontera.
Las propiedades de una columna cilı́ndrica de lı́quido dependen, esencialmente, de su altura. En experimentos fı́sicos reales, es fácil formar una columna
de lı́quido que no sea muy alta. Sin embargo, si vamos separando los discos,
entonces la columna acaba por romperse. Analicemos detenidamente el proceso
que ocurre cuando la columna se destruye al separar los discos. La columna
cilı́ndrica es estable si la altura no supera tres veces el diámetro del disco. Sin
embargo, cuando la altura se aproxima a dicho valor por valores superiores (por
ejemplo, 30 1 veces el diámetro) entonces la columna comienza a destruirse. Si
la altura de la columna va creciendo lenta y cuidadosamente, entonces el comportamiento de la columna alrededor del punto crı́tico puede ser visualmente
observado. El proceso de reestructuración de la columna se representa en la
siguiente figura.
Figure 12
Por tanto, los cilindros bajos son estables y los cilindros altos son inestables,
siendo la altura crı́tica tres veces, aproximadamente, el diámetro de los discos
frontera. Obviamente, para poder realizar estos experimentos satisfactoriamente, el diámetro de los discos tiene que ser muy pequeño, para minimizar el efecto
de la fuerza de la gravedad, para que ésta pueda ser compensada por las fuerzas
de tensión superficial.
El proceso de descomposición de una columna inestable, es decir, su reestructuración cualitativa, puede ser también visualizado mediante el siguiente
18
experimento, que ya se realizaba en el siglo XVII. Consideremos un aro, es decir,
un alambre con forma de circunferencia plana, lo sumergimos en agua jabonosa
y construimos un disco de jabón. Entonces movemos el disco ortogonalmente a
su plano, como se indica en la siguiente figura.
Figure 13
Bajo el efecto de suministrar aire a la pelı́cula de jabón, el disco se deforma y
tiende a transformarse en un cilindro circular, al menos en los puntos cercanos
al aro). Sin embargo, la forma cilı́ndrica desaparece rápidamente, se estrecha
y comienzan a aparecer pompas (esféricas) de jabón. Como ya hemos indicado
anteriormente, el mismo efecto se consigue si fijamos el aro y comenzamos a
soplar perpendicularmente al disco jabonoso.
Una columna lı́quida de forma cilı́ndrica fue el primer ejemplo de superficie
crı́tica estable que encontró Plateau. Entonces Beer conjeturó que todas las superficies de curvatura media constante eran puntos crı́ticos (mı́nimos locales,
concretamente) del funcional área. Sin embargo, el propio Plateau demostró que
dicha conjetura era incorrecta. Consideró un cilindro de altura mayor que el
crı́tico. Desde un punto de vista matemático, tal cilindro sigue siendo un punto
crı́tico (superficie) para el funcional área, dentro del conjunto de todas las superficies. Plateau demostró, analı́ticamente, que tal cilindro tiene la menor área
posible dentro de todas las deformaciones del cilindro que mantienen constante
el área de las secciones horizontales, es decir, estas perturbaciones son aquellas
en las que el lı́quido no se desplaza verticalmente. Sólo se permiten los desplazamientos horizontales del lı́quido que dejan inalteradas las áreas de las secciones
horizontales.
Recordemos que si la altura de un cilindro es menor que la crı́tica, entonces
cualquier perturbación incrementa el área; es decir, en este caso la superficie
original es un mı́nimo local para el funcional área. Sin embargo, si la altura
19
del cilindro es mayor que el crı́tico, entonces el cilindro es un punto de silla,
en el espacio de todas las superficies, por lo que podemos encontrar infinitas
direcciones tales que las perturbaciones del cilindro en esas direcciones hacen
incrementar el área.
Figure 14
Plateau demostró experimentalmente que una superficie crı́tica se comporta
como un punto de silla cuando la altura del cilindro es superior a tres veces
el diámetro de los discos frontera. Plateau construyó una columna cilı́ndrica
de lı́quido entre dos discos y comenzó a deformar verticalmente la superficie,
manteniendo la simetrı́a de la superficie. A continuación, Plateau comenzó a
perturbar la columna de lı́quido con una varita delgada de vidrio, conservando
el área de las secciones horizontales. La columna volvı́a a su posición original
casi instantáneamente, mientras continuaba deformando el cilindro en dirección
vertical. Esto demuestra que la superficie es estable para permutaciones del tipo
descrito.
Figure 15
20
Sin embargo, las perturbaciones verticales tienen otras consecuencias más
relevantes. Es interesante hacer notar que la descomposición de una larga columna de lı́quido sucede de manera ondulatoria, como podemos comprobar seguidamente. Tomemos un hilo delgado recubierto por una capa cilı́ndrica de
lı́quido, de tal forma que el hilo sea el eje del cilindro. Comenzamos a ondular el
cilindro y entonces cada onda se transforma en una bola de lı́quido sobre el hilo
original. Es claro que este fenómeno es el resultado de las fuerzas de tensión
superficial y la inestabilidad de largos cilindros de lı́quido. Es cierto que el razonamiento que acabamos de presentar es simplista, quizás en exceso, ya que las
esferas que aparecen en la última etapa del proceso nunca surgirán en realidad.
El proceso fue estudiado meticulosamente, debido al interés que tenı́a en otras
ciencias (como la ingenierı́a eléctrica), y era importante saber cómo estabilizar
un cable cilı́ndrico muy largo con el alambre situado en su eje de simetrı́a.
21
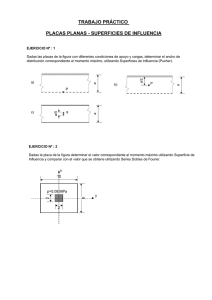
4.
4.1.
A LGUNAS SUPERFICIES MINIMALES
EL
CATENOIDE
El catenoide es posiblemente la superficie mejor conocida de todas las minimales. Puede caracterizarse como la única superficie minimal, aparte del plano,
que es invariante bajo rotaciones alrededor de un eje; en otras palabras, es la
única superficie minimal de revolución (salvo el plano, naturalmente). Su curva
modelo es una catenaria, esto es, una curva obtenida al colgar una cuerda de
dos puntos. Como superficie minimal fue introducida por Meusnier, aunque
probablemente era conocida anteriormente. En la transparencia se indican las
lı́neas de curvatura (paralelos y meridianos) y las lı́neas asintóticas (las curvas
diagonales).
Catenoide
Una representación fı́sica del catenoide puede obtenerse considerando dos
aros metálicos, situados en planos paralelos, sumergirlos en agua jabonosa y,
siendo sumamente cuidadoso, ir separándolos poco a poco.
El catenoide puede extenderse para formar una superficie completa. Como
una superficie completa, su aplicación de Gauss cubre completamente la esfera
excepto dos puntos antı́podas.
Si observamos cuidadosa y detenidamente la extensión de un catenoide para
construir una superficie completa, observamos que el catenoide tiene a aplanarse muy rápidamente, de forma que visto de lejos puede dar la impresión de tener
dos planos paralelos. Es decir, visto en el infinito, casi podrı́amos decir que un
catenoide es un plano (de multiplicidad dos, si se quiere). Se ha demostrado
que este comportamiento es bastante general: toda superficie minimal completa
22
(con curvatura total finita) es, vista desde el infinito, un número finito de planos,
cada uno de ellos de multiplicidad finita.
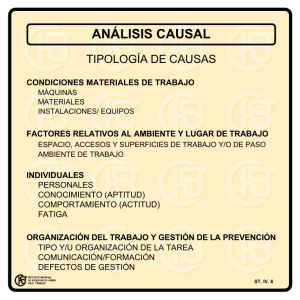
4.2.
EL
HELICOIDE
Junto con el catenoide, el helicoide fue encontrado como superficie minimal por
Meusnier. El helicoide se genera mediante una recta que se desplaza circularmente alrededor de un eje; visualmente, podemos pensar que es una escalera
de caracol sin peldaños y con una anchura infinita. Matemáticamente, cada
punto de la recta se mueve describiendo una hélice sobre un cilindro circular
cuyo eje de revolución es el eje dado. En la transparencia podemos ver el eje,
varias posiciones de la lı́nea recta generatriz y algunas de las hélices generados por algunos puntos. Estas son las lı́neas de curvatura del helicoide. En la
transparencia también podemos ver algunas curvas asintóticas.
Helicoide
En 1842, E. Catalan demostró en su trabajo Sur les surfaces réglées dont
l’aire est un minimun (Sobre las superficies regladas que minimizan el área) que el
helicoide era la única superficie minimal, aparte del plano, que estaba reglada,
es decir, que por cada uno de sus puntos pasa una lı́nea recta enteramente
contenida en la superficie.
4.3.
R ELACI ÓN
ENTRE EL CATENOIDE Y EL HELICOIDE
El catenoide y el helicoide son superficies que están ı́ntimamente relacionadas,
lo cual puede detectarse analizando sus parametrizaciones. Las ecuaciones paramétricas de un catenoide (menos un meridiano) son:
x(u; v) = (a cosh(v) cos(u); a cosh(v)sen(u); av)
23
y las del helicoide son:
y(u; v) = (asenh(v) cos(u); asenh(v)sen(u); au)
donde, en ambos casos, 0 < u < 2 y ,1 < v < 1. Debido a las relaciones que
existen entre las componentes de ambas parametrizaciones, se dice que x e y
son superficies minimales conjugadas.
Una propiedad muy interesante de las superficies minimales conjugadas es la
siguiente. Si x e y son dos de tales superficies, entonces z = cos x + seny , para
todo , es una superficie minimal isométrica tanto a x como a y . La familia z se
denomina la familia asociada de x (o de y ). Por tanto, deducimos que el helicoide
es la superficie minimal conjugada del catenoide y que existe una deformación
isométrica, a través de superficies minimales, que transforma el helicoide en el
catenoide, excepto un meridiano (véase la transparencia).
Fig. 3.32
4.4.
LA
SUPERFICIE DE
E NNEPER
Desde un punto de vista, ésta es la superficie minimal más simple. Su representación paramétrica viene dada por:
x(u; v) = (u ,
u3
v
+
uv2 ; v , + vu2 ; u2 , v2 );
3
3
3
(u; v) 2 R2
que proporciona una superficie algebraica (recordemos que el catenoide y el
helicoide no lo son), definida en todo el plano. Observemos que realizamos una
rotación de =2 alrededor del eje z (un eje vertical) seguido de una reflexión en el
plano xy , la superficie permanece invariante.
El modelo descrito en la transparencia muestra algunas lı́neas de curvatura
que forman una red rectangular sobre la superficie, y un número menor de
lı́neas asintóticas.
24
Superficie Enneper
La superficie tiene dos curvas de autointersección que están en los planos xz
e yz , donde cada curva está compuesta por los puntos de autointersección de
una familia de lı́neas de curvatura. La intersección de la superficie con el plano
xy es un par de lı́neas rectas que pasan por el origen, las cuales son lı́neas
asintóticas de la superficie.
La superficie de Enneper fue descubierta en 1864. Darboux proporciona la
siguiente descripción. Sean dos parábolas confocales en planos ortogonales,
y sea un par de puntos, uno en cada parábola, unidos por un segmento de
lı́nea recta. Por el punto medio del segmento trazamos el plano perpendicular.
Obtenemos una familia biparamétrica de planos cuya envolvente es la superficie
de Enneper.
Puede probarse que la superficie conjugada de la superficie de Enneper se
obtiene mediante una rotación de =4 de la superficie original, de forma que la
familia asociada a la superficie de Enneper se obtiene a partir de la superficie
original mediante una rotación continua.
4.5.
LA
SUPERFICIE DE
C ATALAN
Esta superficie fue descubierta por Catalan en 1855, y tiene la siguiente parametrización:
1
2
1
2
x('; v) = (asen2' , 2a' + av2 cos 2'; ,a cos 2' , av2 cos 2'; 2avsen')
La aplicación
,r + 1=r.
x
está definida en el plano con coordenadas polares
(r; '),
y
v=
Las curvas ' = constante son parábolas que proporcionan una de las familias
de lı́neas de curvatura, y que aparecen en la transparencia. Los vértices de
25
tales parábolas se encuentran sobre un cicloide y el plano de cada parábola es
perpendicular al plano del cicloide.
Superficie Catalan
Las curvas v = constante constituyen la otra familia de las lı́neas de curvatura, que también aparecen dibujadas en la transparencia.
Para ' = n (n = 0; 1; 2; : : : ) la parábola degenera en una lı́nea recta doble. La superficie de Catalan es una superficie periódica y las distintas partes
congruentes están unidas por las lı́neas anteriores.
Las esquinas del cicloide son puntos singulares de la superficie, y puede ser
fácilmente comprobado que son los únicos puntos singulares. En consecuencia,
la superficie de Catalan no puede ser extendida a una superficie completa.
La superficie de Catalan puede ser caracterizada como la superficie minimal
que contiene un cicloide como lı́nea geodésica, y pertenece a una familia mayor,
encontrada por Enneper, de superficies minimales que contienen una familia
uniparamétrica de parábolas.
4.6.
EL
ONDULOIDE
En comparación con la teorı́a de las superficies minimales, el estudio de las superficies con curvatura media constante no nula está todavı́a en su “infancia”.
Una de las razones de este retraso parece ser -en contraste con el caso minimal donde la aplicación de Gauss es holomorfa- que la aplicación de Gauss es
armónica, es decir, el laplaciano N del vector unitario normal N de la superficie
es paralelo a N .
Otra razón, quizás muy relacionada con la anterior, es que se conocen muy
26
pocos ejemplos de superficies con curvatura media constante no nula. Entre
ellos, los más importantes son, sin ninguna duda, aquellos que son invariantes
por rotaciones. Estos ejemplos fueron encontrados por Delanuy en 1841, e incluyen el plano, el catenoide (ambos minimales), la esfera, el cilindro, el onduloide
y el nodoide.
Onduloide
La curva que genera el onduloide puede obtenerse como la trayectoria de un
foco de una elipse que se enrolla a lo largo del eje de rotación. De hecho, esta construcción es bastante general, y reemplazando la elipse por alguna otra
cónica (posiblemente degenerada), podemos obtener todas las demás curvas modelo.
27
5.
5.1.
R EALIZACIONES F ÍSICAS DE SUPERFICIES MINIMALES
LA
REALIZACI ÓN F ÍSICA DE UN HELICOIDE
En 1842 Catalan probó que la única superficie completa y reglada de curvatura
media cero era, aparte del plano, el helicoide. Un helicoide se puede obtener
como la composición de dos movimientos de una lı́nea recta: un movimiento
traslacional con velocidad uniforme y otro rotatorio con velocidad angular uniforme en el plano ortogonal al vector de traslación.
Fig. 17
En otras palabras, se considera una lı́nea recta que intersecta a otra lı́nea
recta perpendicularmente, y se desplaza uniformemente sobre la primera con
una velocidad angular constante. Obviamente, esta superficie no es compacta.
Si nos restringimos solamente a un segmento, en lugar de considerar toda la
lı́nea, nos aparece la siguiente figura.
Fig. 18
28
Plateau construyó “una mitad” del helicoide, tomando una hélice de alambre
alrededor de una lı́nea recta:
Fig. 19,20
Sin embargo, la construcción de un helicoide con una pelı́cula de jabón encierra numerosas dificultades técnicas. Obviamente, un helicoide completo puede
obtener pegando dos mitades, dos réplicas, como las que aparecen en la figura
previa. Lógicamente, estamos suponiendo que los dos ejes de simetrı́a van a
poder superponerse perfectamente en un único eje, para que el helicoide esté
perfectamente construido. El eje vertical estabiliza la pelı́cula de jabón, ya que
si se elimina y sólo nos quedamos con las dos hélices de contorno, entonces, en
el caso en que los “saltos” de las hélices no sean grandes, entonces el helicoide
se transforma en otra superficie distinta:
Fig. 21
Es claro que esta superficie no es reglada, es decir, no está construida mediante segmentos de lı́neas rectas. Los intentos de construir un trozo de un
helicoide recto como una pelı́cula de jabón modelada sobre un alambre cerrado,
utilizando dos hélices coaxiales con el mismo salto, fracasan.
29
La diferencia esencial entre el helicoide recto y las superficies encontradas
anteriormente se muestra claramente aquı́. El hecho es que el helicoide es una
superficie no compacta que existe (desde el punto de vista matemático) con independencia de cualquier contorno o frontera. Como se comprueba en experimentos, es inestable para pequeños valor del salto.
Si nos restringimos y pensamos en construir helicoides a partir de hélices con
un salto suficientemente grande, entonces la construcción de tal superficie no
es difı́cil. Para conseguirlo, necesitamos un contorno construido con dos hélices
coaxiales, que con un salto adecuado permiten construir el helicoide.
Fig. 22
Pero, ¿cómo podemos estar seguros de que esta superficie ası́ construida es
reglada? Podemos realizar la siguiente demostración visual. Es claro que el
helicoide de la Fig. 22 se ha obtenido a partir de la superficie minimal de la
Fig. 21 alargando el salto de las hélices involucradas (lo que conlleva que dichas
hélices se acerquen más al eje). Analicemos detenidamente la deformación h que
se produce al aumentar el salto de las hélices.
Fig. 23
30
Esta parte de la pelı́cula de jabón se fija en nuestra retina como un triángulo
curvilı́neo, que va decreciendo conforme el salto de las espirales se va haciendo
más grande. En un momento determinado, el triángulo desaparece y queda
reducido a un punto, y obtenemos la figura 22. Como la proyección (en nuestra
retina) de la pelı́cula de jabón es como aparece en la figura 23, es claro que entre
dos puntos opuestos hay una lı́nea recta enteramente contenida en la superficie,
ya que en los puntos donde visualmente se cortan las hélices, nuestra retina sólo
capta ese punto.
5.2.
LA
REALIZACI ÓN F ÍSICA DE UN CATENOIDE
Consideremos una catenaria, es decir, la forma que adopta un cable que cuelga
de dos puntos, y que tiene una longitud mayor que la distancia entre dichos
puntos.
catenaria
Es fácil ver que todas las catenarias y, por tanto, todos los catenoides, son
equivalentes, en el sentido de que pueden transformarse unos en otros por un
movimiento del espacio tridimensional y un cambio de escala. En este sentido,
las catenarias nos recuerdan a las parábolas, que también son equivalentes con
respecto a movimientos en el plano y cambios de escala (en contraste con las
hipérbolas y elipses, en que no ocurre esto).
Un catenoide se obtiene al rotar la catenaria alrededor de una lı́nea en su
mismo plano, pero sólo cuando esta lı́nea se encuentra a una cierta distancia
de la catenaria. Si la lı́nea recta que nos hace el papel de eje de rotación es otra
distinta, entonces la superficie que obtenemos no es minimal. Ası́, por ejemplo,
si la catenaria casi toca el eje de revolución (digamos el eje OX ), entonces el
punto más bajo describe una circunferencia de radio muy pequeño. Por tanto,
31
uno de los radios de curvatura es muy pequeño, y el otro es muy grande, de
modo que la suma de ambos de podrá ser cero.
Consideremos la dependencia de la estructura del catenoide respecto del tamaño de su frontera. Por simplicidad, supongamos que partimos de dos circunferencias coaxiales del mismo radio r , y sea h la distancia entre los planos
paralelos que contienen las circunferencias (los aros).
Fig. 25
Como la curvatura media del catenoide es igual a cero, el radio de curvatura
(es decir, el radio del cı́rculo osculador en el vértice de la catenaria, que coincide
con el punto más cercano al eje de rotación) coincide con el radio de la circunferencia descrita por el vértice de la catenaria cuando se rota alrededor del eje,
digamos .
Por tanto, cuanto menor es , mayor debe ser la curvatura de la catenaria en
el vértice. El parámetro varı́a en un intervalo [0; +1).
Si > r , entonces no puede construirse obviamente una superficie minimal. En la figura 26 representamos, con una lı́nea gruesa, la sección del
catenoide por un plano vertical pasando por el eje de simetrı́a.
Cuando
= r, entonces h = 0, y obtenemos los dos cı́rculos.
Cuando < r , entonces la distancia h crece, los discos se separan y surge
una superficie minimal. Conforme ve decreciendo, el valor de h va creciendo, hasta llegar a un máximo hmax , a partir del cual vuelve a decrecer.
Conforme tiende a cero, h tiende también a cero, y la catenaria se va
aproximando al eje. El valor máximo es, aproximadamente (4=3)r .
Cuando la distancia h entre las dos circunferencia excede el valor hmax , entonces
el catenoide desaparece, y la superficie minimal vuelve a transformarse en los
32
dos discos frontera. Esto muestra el paso de una solución de la ecuación de
las superficies minimales a otra cuando entran en escena cambios topológicos
esenciales. En la siguiente figura mostramos varias posiciones consecutivas de
la pelı́cula de jabón.
Fig. 27
Un hecho curioso e importante merece ser destacado: Para cada valor de h,
entre cero y hmax , existen dos catenoides posibles: el interior y el el exterior. Para
valores pequeños, los catenoides son claramente distinguibles; sin embargo,
conforme h va creciendo, los catenoides tienden a fundirse. En consecuencia,
para cada valor h, 0 < h < hmax , existen tres pelı́culas de jabón asociadas a la
misma frontera: dos catenoides y un par de discos.
Plateau conjeturó que el interior era inestable, en contraste con el exterior y
los dos discos, pero no pudo probarlo. Evidentemente, no es posible construir
en la práctica el catenoide interior. No obstante, se ha podido probar, eso sı́,
teóricamente, que Plateau llevaba razón: el catenoide interior es una superficie
inestable.
5.3.
L AS
SUPERFICIES MINIMALES EN LA NATURALEZA
Ya a principios del siglo XVIII era conocido que muchos problemas concretos de
fı́sica, quı́mica, biologı́a, etc. se reducı́an al análisis de superficies minimales.
Veamos un ejemplo extraı́do de la biologı́a.
Las pelı́culas minimales aparecen profusamente en la naturaleza como las
superficies más económicas que constituyen los esqueletos de organismos vivos. El ejemplo más efectivo nos lo proporciona los radiolarian, pequeñı́simos
animales marinos con las más variadas y exóticas formas.
33
Aparentemente, D.A.W. Thompson fue el primero en darse cuenta del hecho
que la tensión superficial jugaba un papel esencial en la configuración de estos seres vivos, en su libro On Growth and Form. Los radiolarian son pequeñas
células de protoplasma con unas formas similares a las pompas de jabón. Como
estos organismos son muy complejos, las superficies minimales que modelan su
estructura tienen muchos puntos y caras singulares, en los cuales se concentra la mayorı́a de su masa corporal. Esta concentración en los puntos y caras
singulares de las pelı́culas de jabón es claramente observable.
El lı́quido fluye libremente desde la pelı́cula de jabón hasta las caras y aristas,
donde el lı́quido se ralentiza y concentra, haciendo visible la superficie minimal.
El mismo proceso ocurre en los radiolarians. La concentración de lı́quido en las
aristas y caras conduce a la formación de partı́culas sólidas que van formando
gradualmente el esqueleto del animal. Después de la muerte del animal, la
masa corporal desaparece, se descompone, y un pequeño pero sólido esqueleto
permanece. En la figura 44 mostramos tres esqueletos de radiolarians.
Fig. 44
El dibujo está tomado del libro de E. Haeckel totulado Report on the ScientificResults of the Voyage of the HMS Challenger during the Years 1873–1876.
Se muestran también tres superficies minimales (con las pelı́culas de jabón)
que están construidas sobre tres poliedros básicos: tetraedro, un cubo y un
prisma. La similitud entre las formas de los esqueletos de los radiolarians y
estas pelı́culas jabón es bastante evidente. Hay radiolarins más complicados,
como los que se muestran en la siguiente figura.
34
Fig. 45
35