Filtros de Wiener - Facultad de Ingeniería
Anuncio

Filtros de Wiener
Tratamiento Estadístico de Señales
Pablo Musé, Ernesto López, Luis Di Martino
{pmuse,elopez,dimartino}@fing.edu.uy
Departamento de Procesamiento de Señales
Instituto de Ingeniería Eléctrica
Facultad de Ingeniería
Abril de 2015
Biblio:
I Haykin, Adaptive Filter Theory, 4ta. edición: Capítulo 2 y Apéndice B.
I Hayes, Statistical Digital Signal Processing and Modeling, 1996: Capítulo 7,
secs. 7.2 y 7.3.
Introducción
Estudiaremos una clase de filtros en tiempo discreto, óptimos en un
sentido que definiremos más adelante, llamados Filtros de Wiener.
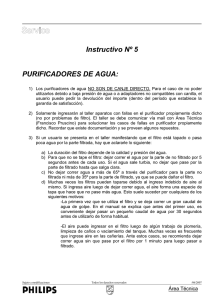
Filtrado lineal óptimo: planteo del problema
Given input samples and filter coefficients
Input
u(0), u(1), u(2), …
Linear
discrete-time
filter
w0, w1, w2, …
Conditions at time n
Output
y(n)
–
Σ
Desired
response
d(n)
+
Estimation
error
e(n)
Figure 2.1
I
{u(n)}, {d(n)}: realizaciones
de procesos estocásticos conjuntamente
Block diagram representation of the statistical filtering problem.
WSS, de media nula (si no, basta con restárselas).
I
© 2002
Prentice Hall, Inc. de la respuesta deseada en tiempo n.
y(n):
estimación
Simon Haykin
I
e(n) = d(n) − y(n): error de estimación en tiempo n
Adaptive Filter Theory 4E
Objetivo: hacer e(n) “lo más chico posible” en algún sentido estadístico.
Restricciones y opciones de diseño
I
Sobre el filtro
I
I
I
Restricciones: lineal y discreto.
Opciones: FIR o IIR. Trataremos la teoría para IIRs (siendo los FIRs
un caso particular), pero nos focalizaremos en los FIRs por ser
inherentemente estables.
Obs: cuando tratemos con filtros adaptivos, tener que lidiar con IIRs
y sus posibles inestabilidades hacen del problema difícil de manejar.
Por esta razón en general en filtros adaptivos se utilizan FIRs, a pesar
que los IIR son mucho menos demandantes computacionalmente.
Restricciones y opciones de diseño
I
Sobre el filtro
I
I
I
I
Restricciones: lineal y discreto.
Opciones: FIR o IIR. Trataremos la teoría para IIRs (siendo los FIRs
un caso particular), pero nos focalizaremos en los FIRs por ser
inherentemente estables.
Obs: cuando tratemos con filtros adaptivos, tener que lidiar con IIRs
y sus posibles inestabilidades hacen del problema difícil de manejar.
Por esta razón en general en filtros adaptivos se utilizan FIRs, a pesar
que los IIR son mucho menos demandantes computacionalmente.
Sobre el criterio estadístico de optimalidad
I
I
I
E[|e(n)|]: convexo, no diferenciable. Corresponde a distribuciones de
Laplace.
E[|e(n)|2 ]: convexo, diferenciable. Corresponde a distribuciones
Gaussianas. Es matemáticamente más sencillo de tratar (podemos
calcular gradientes).
Otros.
Posibles Aplicaciones
Dependiendo de cómo están vinculadas u(n) y d(n), varios problemas
fundamentales pueden ser planteados como un filtrado de Wiener:
Posibles Aplicaciones
Dependiendo de cómo están vinculadas u(n) y d(n), varios problemas
fundamentales pueden ser planteados como un filtrado de Wiener:
I
Filtrado: u(n) = d(n) + v(n), con v(n) ruido. Estimar d(n) a partir
de muestras ruidosas con un filtro causal, i.e. a partir de las
muestras u(n), u(n − 1), u(n − 2), . . . .
Posibles Aplicaciones
Dependiendo de cómo están vinculadas u(n) y d(n), varios problemas
fundamentales pueden ser planteados como un filtrado de Wiener:
I
Filtrado: u(n) = d(n) + v(n), con v(n) ruido. Estimar d(n) a partir
de muestras ruidosas con un filtro causal, i.e. a partir de las
muestras u(n), u(n − 1), u(n − 2), . . . .
I
Suavizado: idem salvo que el filtro puede ser no causal. Por ejemplo,
estimar d(n) offline a partir de todo el registro de datos disponibles
(previos y posteriores a n).
Posibles Aplicaciones
Dependiendo de cómo están vinculadas u(n) y d(n), varios problemas
fundamentales pueden ser planteados como un filtrado de Wiener:
I
Filtrado: u(n) = d(n) + v(n), con v(n) ruido. Estimar d(n) a partir
de muestras ruidosas con un filtro causal, i.e. a partir de las
muestras u(n), u(n − 1), u(n − 2), . . . .
I
Suavizado: idem salvo que el filtro puede ser no causal. Por ejemplo,
estimar d(n) offline a partir de todo el registro de datos disponibles
(previos y posteriores a n).
I
Predicción: si d(n) = u(n + 1) y el filtro es causal, se busca estimar
u(n + 1) a partir de u(n) y sus muestras previas.
Posibles Aplicaciones
Dependiendo de cómo están vinculadas u(n) y d(n), varios problemas
fundamentales pueden ser planteados como un filtrado de Wiener:
I
Filtrado: u(n) = d(n) + v(n), con v(n) ruido. Estimar d(n) a partir
de muestras ruidosas con un filtro causal, i.e. a partir de las
muestras u(n), u(n − 1), u(n − 2), . . . .
I
Suavizado: idem salvo que el filtro puede ser no causal. Por ejemplo,
estimar d(n) offline a partir de todo el registro de datos disponibles
(previos y posteriores a n).
I
Predicción: si d(n) = u(n + 1) y el filtro es causal, se busca estimar
u(n + 1) a partir de u(n) y sus muestras previas.
I
Deconvolución: u(n) = h ∗ d(n) + v(n). El objetivo es encontrar
algún filtro de respuesta al impulso g(n) tal que podamos estimar
ˆ = g ∗ u(n).
d(n)
Posibles Aplicaciones
Dependiendo de cómo están vinculadas u(n) y d(n), varios problemas
fundamentales pueden ser planteados como un filtrado de Wiener:
I
Filtrado: u(n) = d(n) + v(n), con v(n) ruido. Estimar d(n) a partir
de muestras ruidosas con un filtro causal, i.e. a partir de las
muestras u(n), u(n − 1), u(n − 2), . . . .
I
Suavizado: idem salvo que el filtro puede ser no causal. Por ejemplo,
estimar d(n) offline a partir de todo el registro de datos disponibles
(previos y posteriores a n).
I
Predicción: si d(n) = u(n + 1) y el filtro es causal, se busca estimar
u(n + 1) a partir de u(n) y sus muestras previas.
I
Deconvolución: u(n) = h ∗ d(n) + v(n). El objetivo es encontrar
algún filtro de respuesta al impulso g(n) tal que podamos estimar
ˆ = g ∗ u(n).
d(n)
I
Otros.
Filtrado de Wiener: Solución al problema
I
Objetivo: encontrar w0 , w1 , w2 , . . . tales que se minimice
Jn (w) = E[|e(n)2 |] = J(w).
I
Desarrollaremos la solución matemática a este problema de
optimización estadística abordando dos enfoques diferentes pero
complementarios:
I
El principio de ortogonalidad (característicos de los espacios de
Hilbert)
I
La superficie de performance del error e(n).
Las ecuaciones normales o de Wiener-Hopf (1)
I
Entrada:
Resp. al impulso del filtro:
I
u(0), u(1), u(2), . . .
w0 , w1 , w2 , . . .
complejas e infinitas.
Salida del filtro:
y(n) =
+∞
X
wk∗ u(n − k), n = 0, 1, 2, . . .
k=0
H
=w u(n), con wT = [w0 , w1 , w2 , . . . ],
u(n)T = [u(n), u(n − 1), u(n − 2), . . . ]
I
e(n) = d(n) − y(n).
I
Recordemos que {u(n)}, {d(n)} son realizaciones de procesos
estocásticos conjuntamente WSS, de media nula
Las ecuaciones normales o de Wiener-Hopf (2)
Queremos ver bajo qué condiciones en w (o cual es el filtro tal que)
J(w) = E[e∗ (n)e(n)] alcanza el mínimo.
Definamos pT = [p(0), p(−1), p(−2), . . . ] = E[u(n)d∗ (n)].
Ejercicio:
1. Escribir J(w) como función de w, R = E[u(n)u(n)H ], p y
σd2 = E[|d(n)|2 ], y verificar que es cuadrática y convexa en w.
2. Escribir el sistema de ecuaciones que debe verificar
wo = arg minw J(w), conocido como ecuaciones normales.
Las ecuaciones normales o de Wiener-Hopf (2)
Queremos ver bajo qué condiciones en w (o cual es el filtro tal que)
J(w) = E[e∗ (n)e(n)] alcanza el mínimo.
Definamos pT = [p(0), p(−1), p(−2), . . . ] = E[u(n)d∗ (n)].
Ejercicio:
1. Escribir J(w) como función de w, R = E[u(n)u(n)H ], p y
σd2 = E[|d(n)|2 ], y verificar que es cuadrática y convexa en w.
2. Escribir el sistema de ecuaciones que debe verificar
wo = arg minw J(w), conocido como ecuaciones normales.
J(w) =E[(d∗ (n) − uH (n)w)(d(n) − wH u(n))]
=E[|d(n)|2 + wH E[u(n)u(n)H ]w − wH E[u(n)d∗ (n)] − E[d(n)uH (n)]w
=wH Rw − pH w − wH p + σd2 .
Es convexa ya que R es def. positiva, por lo que admite un único mínimo local.
Las ecuaciones normales o de Wiener-Hopf (2)
Queremos ver bajo qué condiciones en w (o cual es el filtro tal que)
J(w) = E[e∗ (n)e(n)] alcanza el mínimo.
Definamos pT = [p(0), p(−1), p(−2), . . . ] = E[u(n)d∗ (n)].
Ejercicio:
1. Escribir J(w) como función de w, R = E[u(n)u(n)H ], p y
σd2 = E[|d(n)|2 ], y verificar que es cuadrática y convexa en w.
2. Escribir el sistema de ecuaciones que debe verificar
wo = arg minw J(w), conocido como ecuaciones normales.
J(w) =E[(d∗ (n) − uH (n)w)(d(n) − wH u(n))]
=E[|d(n)|2 + wH E[u(n)u(n)H ]w − wH E[u(n)d∗ (n)] − E[d(n)uH (n)]w
=wH Rw − pH w − wH p + σd2 .
Es convexa ya que R es def. positiva, por lo que admite un único mínimo local.
∂
Sabemos que ∇w = 2 ∂w
∗ (ver Haykin, Apéndice B).
∂J
0 = 2 ∂w
∗ (wo ) = 2Rwo − 0 − 2p − 0 ⇔ Rwo = p Ecuaciones normales
Principio de ortogonalidad
Breve paréntesis: E[X H Y ] como producto interno
————————————————————————–
I X e Y vectores aleatorios t.q. E[X] = E[Y ] = 0, a ∈ C constante.
I < X, Y >:= E[X H Y ] define un producto interno:
I < X, X >≥ 0, y < X, X >= 0 ⇔ E[X] = 0.
I < X, Y >=< Y, X >∗
I < aX, Y >= a∗< X, Y > (linealidad de E[·]).
I
< X, aY >= a < X, Y > (linealidad de E[·]).
I < X, Y >= E[X H Y ] = 0 ⇔ X, Y no correlacionados (o ortogonales para este p. i.).
————————————————————————–
Principio de ortogonalidad
Breve paréntesis: E[X H Y ] como producto interno
————————————————————————–
I X e Y vectores aleatorios t.q. E[X] = E[Y ] = 0, a ∈ C constante.
I < X, Y >:= E[X H Y ] define un producto interno:
I < X, X >≥ 0, y < X, X >= 0 ⇔ E[X] = 0.
I < X, Y >=< Y, X >∗
I < aX, Y >= a∗< X, Y > (linealidad de E[·]).
I
< X, aY >= a < X, Y > (linealidad de E[·]).
I < X, Y >= E[X H Y ] = 0 ⇔ X, Y no correlacionados (o ortogonales para este p. i.).
————————————————————————–
Rwo = p ⇔ E[u(n)u(n)H ]wo = E[u(n)d∗ (n)]
⇔ E[u(n)(d∗ (n) − u(n)H wo )] = E[u(n)e∗o (n)] = 0.
⇔ E[u(n − k)e∗o (n)] = 0 ∀ k = 0, 1, 2, . . .
⇒ La CNS para que J alcance el mínimo es que el error e(n) = eo (n)
sea ortogonal a todas las muestras involucradas al tiempo n.
Principio de ortogonalidad (cont.)
Cuando el filtro opera en condición óptima w = wo , la estimación de la
respuesta deseada y el error de estimación son ortogonales:
E[yo (n)e∗ (n)] = E[woH u(n)e∗o (n)] = woH E[u(n)e∗o (n)] = 0.
Principio de ortogonalidad (cont.)
Cuando el filtro opera en condición óptima w = wo , la estimación de la
respuesta deseada y el error de estimación son ortogonales:
E[yo (n)e∗ (n)] = E[woH u(n)e∗o (n)] = woH E[u(n)e∗o (n)] = 0.
Error cuadrático medio mínimo
ˆ
eo (n) = d(n) − yo (n), yo (n) = d(n),
Jmin = E[|eo (n)|2 ]
Por el principio de ortogonalidad, sabemos que eo (n) ⊥ yo (n), de dónde
d(n) = eo (n) + yo (n) ⇒ E[|d(n)|2 |] = E[|eo (n)|2 ] + E[|yo (n)|2 ]
| {z } | {z } | {z }
σd2
⇒ Jmin = σd2 − σd2ˆ ⇔ ε :=
Jmin
σd2
Jmin
=1−
σd̂2
σd2
σ2
d̂
. Tendremos 0 ≤ ε ≤ 1.
Solución de las ecs. normales para filtros transversales
u(n)
z–1
w*0
u(n-1)
z–1
w*1
...
u(n-M+2)
...
*
wM–2
z–1
u(n-M+1)
*
wM
–1
...
e(n)
–
ˆ
d(n|u
n)
+
Ahora estamos en dimensión finita:
d(n)
u(n)T = [u(n), u(n − 1), . . . , u(n − M + 1)]
Figure 2.4
wT = [w0 , w1 , . . . , wM −1
], woTfilter.= [wo,0 , wo,1 , . . . , wo,M −1 ]
Transversal
pT = [p(0), p(−1), . . . , p(−M + 1)]
−1
R Hall,
p Inc.−→ Necesitamos conocer:
o =
©w
2002
Prentice
Simon Haykin
las correlaciones cruzadas entre u(n − k)
Adaptive Filter Theory 4E
matriz de correlación de u(n) y
y d(n), k = 0, 1, . . . , M − 1.
Superficie de performance del error
J(w) = wH Rw − pH w − wH p + σd2 .
Jmin = J(wo ) = pH R−H RR−1 p − pH R−1 p − pH R−H p + σd2 .
= σd2 − pH R−1 p
= σd2 − pH wo .
Se puede ver fácilmente que J(w) = Jmin + (w − wo )H R(w − wo )
Superficie de performance del error
J(w) = wH Rw − pH w − wH p + σd2 .
Jmin = J(wo ) = pH R−H RR−1 p − pH R−1 p − pH R−H p + σd2 .
= σd2 − pH R−1 p
= σd2 − pH wo .
Se puede ver fácilmente que J(w) = Jmin + (w − wo )H R(w − wo )
Forma canónica de la superficie de error
Sabemos que R = QΛQH (R hermítica, teorema espectral). Luego,
J(w) = Jmin + (w − wo )H QΛQH (w − wo )
= Jmin + vH Λv, con v = QH (w − wo ) la proyección de (w − wo )
en los ejes principales de R (∴ de la superficie de error).
= Jmin +
M
−1
X
k=0
λk |vk |2 .
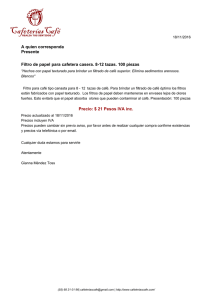
Superficie de performance del error: ejemplo de un filtro con
dos taps
14.47
Cost function J
11.61
8.75
5.88
3.02
0.16
4.00
3.20
4.00
2.40
w0
3.00
1.60
0.80
1.00
0.00
2.00
w1
0.00
Figure 2.7
Error-performance surface of the two-tap transversal filter described in the example of Section 2.7.
Figure 2.8
En la forma canónica, Jmin se alcanza en (w
− plots
woof) the
=error-performance
(0, 0), y los
ejes
Contour
surface
depicted in Fig 2.7.
están orientados según los ejes principales de las elipses de las curvas de
nivel.
© 2002 Prentice Hall, Inc.
© 2002 Prentice Hall, Inc.
Simon Haykin
Adaptive Filter Theory 4E
Simon Haykin
Filtros de Wiener IIR
No serán abordados aquí por las razones expuestas en la introducción: la
mayoría de las señales no son WSS y a lo sumo se asumirá que los
procesos son localmente WSS, lo que da lugar a los filtros adaptivos.
Pero en el caso de que los procesos sean WSS en su conjunto, pueden ser
de gran utilidad.
Se recomienda la siguiente lectura:
I
Filtro de Wiener IIR no causal (Hayes, §7.3.1). Ejemplo de
aplicación: Deconvolución (Hayes, §7.3.5).
I
Teorema de factorización espectral (Hayes, §. 3.5)
I
Filtro de Wiener IIR causal (Hayes, §7.3.2 y §7.3.3)