Operadores de rotación. - Pontificia Universidad Católica de Chile
Anuncio

MECANICA CUANTICA AVANZADA FIM 8440
(6)
MECANICA CUANTICA AVANZADA
FIM 8440
(6)
Ricardo Ramı́rez
Facultad de Fı́sica, Pontificia Universidad Católica, Chile
1er. Semestre 2012
Ricardo Ramı́rez
Facultad de Fı́sica, Pontificia Universidad Católica, Chile
MECANICA CUANTICA AVANZADA FIM 8440
(6)
Rotaciones y Operadores Tensoriales
Rotaciones y Operadores Tensoriales
Si ~J es el momento angular de un sistema, el operador
~
Rα = e−i J·~α
rota este sistema, alrededor del eje α̂ en el ángulo α. Si Rα actua sobre el
estado propio |jmi de J 2 y Jz .
[Rα , J 2 ] = 0
de modo que
J 2 Rα |jmi = Rα J 2 |jmi = j(j + 1)Rα |jmi
Sin embargo sólo si el eje α̂ coincide con el eje z, dejan Jz invariante. Ya que
los estados |jmi forman un conjunto completo
Rα |jmi =
j
X
|jm0 idm0 m (α)
m0 =−j
Ricardo Ramı́rez
Facultad de Fı́sica, Pontificia Universidad Católica, Chile
(j)
(1)
MECANICA CUANTICA AVANZADA FIM 8440
(6)
Rotaciones y Operadores Tensoriales
Como los estados |jmi son ortogonales
~
dm0 m = hjm0 |e−i J·~α |jmi
(j)
(2)
Es decir cada rotación puede ser asociada a una matrix de dimensión
(2j + 1) × (2j + 1).
Si ejecutamos dos rotaciones sucesivas α y β que sean equivalente a una
sola rotación γ,
Rγ = Rβ Rα
luego
hjm|Rγ |jm0 i =
X
hjm|Rβ |jm00 ihjm00 |Rα |jm0 i
m00
o sea
(j)
dmm0 (γ) =
X
(j)
(j)
dmm00 (β)dm00 m0 (α)
m00
o
d (j) (γ) = d (j) (β)d (j) (α)
Un conjunto de matrices que poseen la propiedad (3) se llama una
representación del grupo de rotación.
Ricardo Ramı́rez
Facultad de Fı́sica, Pontificia Universidad Católica, Chile
(3)
MECANICA CUANTICA AVANZADA FIM 8440
(6)
Rotaciones y Operadores Tensoriales
Una matriz que no representa rotación alguna, i.e α = 0, tiene elementos
hjm0 |jmi = δmm0 y constituye una matriz identidad de dimensión 2j + 1.
La matriz d (j) (α) es unitaria, ya que
~
{d (j) (α)† }m0 m = dmm0 (α)∗ = hjm0 |ei J·~α |jmi = dm0 m (−α)
(j)
(j)
es decir,
d (j) (α)† = d (j) (−α)
y
d (j) (α)† d (j) (α) = I
Los operadores Rα actuan sobre el conjunto de estados |jmi, con j fijo de manera
irreducible. Por ejemplo, si tenemos un conjunto de ocho estados con j = 1 y j = 2, la
acción Rα sobre un estado j = 1 lo convierte en una combinación de estados con
j = 1, sin ninguna componente j = 2. Similarmente la operación sobre un estado j = 2
no resulta en estados j = 1. Entonces el conjunto de ocho estados se separa en dos:
los estados con j = 1 y los estados con j = 2. Ası́ se habla que esta operación actua
sobre estos ocho estados en forma reducible.
Ricardo Ramı́rez
Facultad de Fı́sica, Pontificia Universidad Católica, Chile
MECANICA CUANTICA AVANZADA FIM 8440
(6)
Rotaciones y Operadores Tensoriales
Por otra parte si tenemos un conjunto de estados que tienen el mismo j, no
existe un subconjunto de estos estados que se transformen sólo entre sı́ . Es
decir, si empezamos con |jmi, podemos rotarlo de 2j + 1 maneras diferentes
en 2j + 1 estados linealmente independientes. Sobre estos estados el
operador de rotación actúa en irreducible.
k
k
2j+1−k
Ricardo Ramı́rez
Facultad de Fı́sica, Pontificia Universidad Católica, Chile
2j+1−k
MECANICA CUANTICA AVANZADA FIM 8440
(6)
Rotaciones y Operadores Tensoriales
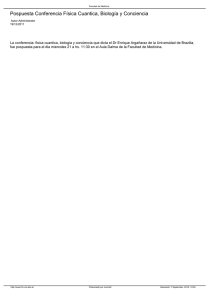
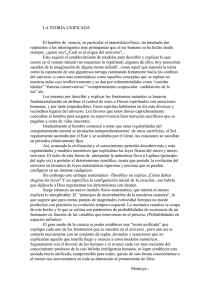
Angulos de Euler
Tomamos los tres ejes coordenados x, y , z y realizamos una rotación segun
el ángulo φ alrededor del eje z, luego rotamos segun el ángulo θ alrededor
del eje y 0 y finalmente rotamos en ψ alrededor del eje z 0
z
z’
θ
y’’
ψ
x
ϕ
y
Ricardo Ramı́rez
Facultad de Fı́sica, Pontificia Universidad Católica, Chile
y’
MECANICA CUANTICA AVANZADA FIM 8440
(6)
Rotaciones y Operadores Tensoriales
El operador que representa estas tres operaciones es
Rφ,θ,ψ = e−iψJz 0 e−iθJy 0 e−iφJz
(4)
Consideremos ahora la siguiente operación para la componente de J segun
y
Jy 0 = e−iφJz Jy eiφJz
entonces también se cumple
Jy20 = e−iφJz Jy2 eiφJz
y en general
f (Jy 0 ) = e−iφJz f (Jy )eiφJz
y por lo tanto
e−iθJy 0 = e−iφJz e−iθJy eiφJz
similarmente
e−iψJz 0 = e−iθJy 0 e−iψJz eiθJy 0
y reemplazando estas dos últimas resultados en (4), obtenemos
Rφ,θ,ψ = e−iφJz e−iθJy e−iψJz
Ricardo Ramı́rez
Facultad de Fı́sica, Pontificia Universidad Católica, Chile
MECANICA CUANTICA AVANZADA FIM 8440
(6)
Rotaciones y Operadores Tensoriales
Demostración
Rφ,θ,ψ = e−iθJy 0 e−iψJz eiθJy 0 e−iφJz e−iθJy eiφJz e−iφJz
Rφ,θ,ψ = e−iφJz e−iθJy eiφJz e−iψJz e−iφJz eiθJy eiφJz e−iφJz e−iθJy eiφJz e−iφJz
Rφ,θ,ψ = e−iφJz e−iθJy e−iψJz eiθJy eiφJz e−iφJz e−iθJy
Rφ,θ,ψ = e−iφJz e−iθJy e−iψJz
Ricardo Ramı́rez
Facultad de Fı́sica, Pontificia Universidad Católica, Chile
MECANICA CUANTICA AVANZADA FIM 8440
(6)
Rotaciones y Operadores Tensoriales
Veamos ahora cuales son los elementos de matriz correpondientes a esta
rotación
(j)
dmm0 (φ, θ, ψ)
=
hjm|e−iφJz e−iθJy e−iψJz |jm0 i
=
e−imφ e−im ψ hjm|e−iθJy |jm0 i = e−imφ e−im ψ dmm0 (θ) (5)
0
0
(j)
(j)
Los elementos dmm0 (θ) resultan ser
reales:
(j)
0
z
(j)
d−m−m0 (θ) = (−1)2j−m−m dmm0 (θ)
(6)
y también
s
4π
(j)
∗
Yjm
(θ, φ)
dm0 (φ, θ, 0) =
2j + 1
(7)
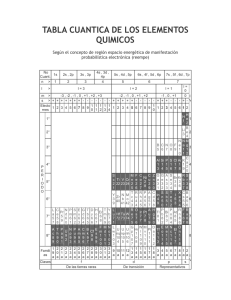
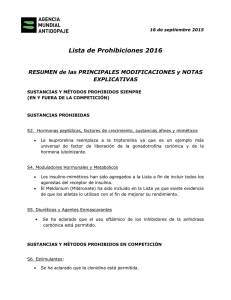
Para demostrar esta relación
primero note que Rφ,θ,0 lleva el eje
z al eje (θ, φ)
z’
θ
x
φ
x’
Ricardo Ramı́rez
Facultad de Fı́sica, Pontificia Universidad Católica, Chile
y
MECANICA CUANTICA AVANZADA FIM 8440
(6)
Rotaciones y Operadores Tensoriales
Si designamos por |~ro i un estado propio de ~r . Este estado también puede
designarse por |ro , θ, φi, pero como sólo nos interesa su dirección lo
llamaremos |θ, φi. Como ya vimos
Rφ,θ,0 |θ = 0, φ = 0i = |θ, φi
y por lo tanto
X
hjm|Rφ,θ,0 |jm0 ihjm0 |0, 0i = hjm|φ, θi
m0
Pero en la representación de coordenadas
hr , θ, φ|jmi = f (r )Yjm (θ, φ)
y para la parte angular
hθ, φ|jmi = Yjm (θ, φ)
ası́ (8) se puede escribir como
X (j)
∗
∗
0 (0, 0) = Yjm0 (θ, φ)
dmm0 (φ, θ, 0)Yjm
m0
Ricardo Ramı́rez
Facultad de Fı́sica, Pontificia Universidad Católica, Chile
(8)
MECANICA CUANTICA AVANZADA FIM 8440
(6)
Rotaciones y Operadores Tensoriales
entonces recordando que
r
∗
0 (0, 0) =
Yjm
2j + 1
δm0 ,0
4π
obtenemos (7).
Ahora volvamos a la rotación Rα . Sean (θ0 , φ0 ) las coordenadas obtenidas al
rotar (θ, φ) en el ángulo −|α| alrededor del eje α
~ . Entonces
hθ, φ|Rα = hθ0 , φ0 |
entonces se demuestran las siguientes relaciones:
hθ, φ|Rα |jmi
=
j
X
hθ, φ|jm0 idmm0 (α)
(j)
m0 =−j
hθ0 , φ0 |jmi
=
j
X
hθ, φ|jm0 idmm0 (α)
(j)
m0 =−j
Yjm (θ0 , φ0 )
=
j
X
m0 =−j
Ricardo Ramı́rez
Facultad de Fı́sica, Pontificia Universidad Católica, Chile
(j)
Yjm (θ, φ)dmm0 (α)
(9)
MECANICA CUANTICA AVANZADA FIM 8440
(6)
Rotaciones y Operadores Tensoriales
Haciendo m = 0, obtenemos
s
Yj0 (θ0 , 0) =
j
4π X
∗
Yjm (θ, φ)Yjm
(θα , φα )
2j + 1
m=−j
Se puede demostrar que θ0 es el ángulo entre los ejes (θ, φ) y (θα , φα ).
Esta relación corresponde al teorema de adición de los esféricos armónicos.
Ahora vamos a estudiar los estados propios |j1 j2 m1 m2 i de dos momentos
angulares J1 y J2 . Para ejecutar una rotación de estos estados debemos
~ ·~
J
actuar con e−i α
donde ~J = ~J1 + ~J2 . En este caso esta operación no actúa
irreduciblemente sobre este estado, ya que sabemos que |j1 j2 m1 m2 i se
puede escribir como una combinación lineal de estados propios |j1 j2 jmi de J 2
y Jz y que bajo una rotación estados con diferentes j no se mezclan. Ası́ el
conjunto de (2j1 + 1)(2j2 + 1) estados |j1 j2 m1 m2 i se separan en grupos de
estados para los posibles valores de j, y los estados con un valor de j dado
se transforman sólo entre ellos bajo una rotación.
Ricardo Ramı́rez
Facultad de Fı́sica, Pontificia Universidad Católica, Chile
MECANICA CUANTICA AVANZADA FIM 8440
(6)
Rotaciones y Operadores Tensoriales
Veamos como se transforma |j1 j2 m1 m2 i bajo una rotación. Ya que
~
~
~
~ ·J
~ ·J1 −i α
e−i α
= e−i α
e ~ ·J2 , J1 y J2 actúan separadamente y podemos escribir
X
(j )
(j )
~ ·~
J
e−i α
|j1 j2 m1 m2 i =
|j1 j2 m10 m20 idm10 m (α)dm20 m (α)
1
m10 m20
1
2
2
y luego
~
~ ·J
hj1 j2 m10 m20 |e−i α
|j1 j2 m1 m2 i = dm10 m (α)dm20 m (α)
(j )
(j )
1
1
2
2
(m10 m20 , m1 m2 )
(10)
El lado izquierdo puede verse como el elemento
de una matriz
de dimensión (2j1 + 1)(2j2 + 1) por (2j1 + 1)(2j2 + 1). Esta matriz representa
el producto directo de las matrices d (j1 ) (α) y d (j2 ) (α), i.e.
(j )
(j )
[d (j1 ) (α) ⊗ d (j2 ) (α)]m10 m20 ,m1 m2 = dm10 m (α)dm20 m (α)
1
Ricardo Ramı́rez
Facultad de Fı́sica, Pontificia Universidad Católica, Chile
1
2
2
MECANICA CUANTICA AVANZADA FIM 8440
(6)
Rotaciones y Operadores Tensoriales
La transformación de la base |j1 j2 m1 m2 i a la base |j1 j2 jmi está dada por los
coeficientes de Clebsh-Gordan. Entonces
X
~ ·~
J
~ ·~
J
hj1 j2 m10 m20 |e−i α
|j1 j2 m1 m2 i =
hj1 j2 m10 m20 |j1 j2 jm0 ihj1 j2 jm0 |e−i α
|j1 j2 jmi
jm0 m
×
hj1 j2 jm|j1 j2 m1 m2 i
(11)
pero de (2)
~
~ ·J
hj1 j2 jm0 |e−i α
|j1 j2 jmi = dm0 m (α)
(j)
Utilizando esta relación y (10) en (11) obtenemos ahora la transformación
para las representaciones,
X
(j )
(j )
(j)
dm10 m (α)dm20 m (α) =
hj1 j2 m10 m20 |j1 j2 jm0 ihj1 j2 m1 m2 |j1 j2 jmidm0 m (α)
(12)
1
1
2
2
jm0 m
o utilizando la ortogonalidad de los coeficientes de Clebsh-Gordan podemos
invertir esta relación
X X
(j )
(j )
(j)
hj1 j2 m10 m20 |j1 j2 j 0 m0 ihj1 j2 m1 m2 |j1 j2 jmidm10 m (α)dm20 m (α) = dm0 m (α)δjj 0
m10 m1 m20 m2
Ricardo Ramı́rez
Facultad de Fı́sica, Pontificia Universidad Católica, Chile
1
1
2
2
MECANICA CUANTICA AVANZADA FIM 8440
(6)
Rotaciones y Operadores Tensoriales
Si en (12) hacemos m1 = m2 = 0, entonces también m es cero y obtenemos
X
(j)
(j )
(j )
dm10 0 (α)dm20 0 (α) =
hj1 j2 m10 m20 |j1 j2 jm0 ihj1 j2 00|j1 j2 j0idm0 0 (α)
(13)
1
2
jm0
y utilizamos el complejo conjugado de (7) para obtener
Yj1 m1 (θ, φ)Yj2 m2 (θ, φ) =
s
X (2j2 + 1)(2j2 + 1)
hj1 j2 m2 m2 |j1 j2 jmihj1 j2 00|j1 j2 j0iYjm (θ, φ)
4π(2j + 1)
jm
lo que nos permite expresar un producto de esféricos armónicos como una
combinación lineal de ellos.
Ricardo Ramı́rez
Facultad de Fı́sica, Pontificia Universidad Católica, Chile
MECANICA CUANTICA AVANZADA FIM 8440
(6)
Rotaciones y Operadores Tensoriales
Vamos a calcular ahora el promedio de todas las rotaciones (todas las
rotaciones alrededor de un punto) definidas a traves de
Z
Z
Z 4π
Z
1 +1
dφ 4π dψ
dωF (ω) =
d(cos θ)
F (φ, θ, ψ)
2 −1
4π 0 4π
0
los 4π se colocan a fin de cubrir casos en j sea medio entero. Consideremos
(j)
el caso particular F (φ, θ, ψ) = dmm0 (φ, θ, ψ)
Z
(j)
dωdmm0 (ω) =
1
2
Z
+1
Z
d(cos θ)
−1
0
4π
dφ
4π
4π
Z
0
dψ (j)
d 0 (φ, θ, ψ)
4π mm
Utilizando (5), tenemos:
Z
Z
Z 4π
Z 4π
1 +1
dφ (j)
dψ −im0 ψ
(j)
dωdmm0 (ω) =
d(cos θ)
dmm0 (φ, θ, 0)
e
2 −1
4π
4π
0
0
pero
4π
Z
0
Ricardo Ramı́rez
dψ −im0 ψ
e
= δm0 0
4π
Facultad de Fı́sica, Pontificia Universidad Católica, Chile
MECANICA CUANTICA AVANZADA FIM 8440
(6)
Rotaciones y Operadores Tensoriales
pero m0 = 0 sólo si j = I = entero, entonces utilizando (7) tenemos
Z
(j)
dωdmm0 (ω)
=
=
=
Z
+1
4π
Z
dφ (j)
d (φ, θ, 0)
4π m0
s
Z +1
Z 4π
1
4π
∗
δjI δm0 0
Yjm
(θ, φ)
d(cos θ)
dφ
2
2j
+1
−1
0
1
δjI δm0 0
2
d(cos θ)
−1
0
δj0 δm0 0 δm0
Ya que el promedio de un esférico armónico sobre todos los ángulos es cero,
a menos que j = 0
Este resultado lo podemos aplicar a la ecuación (12) y ası́ obtenemos
Z
(j )
(j )
dωdm10 m (ω)dm20 m (ω) = hj1 j2 m1 m2 |j1 j2 00ihj1 j2 m10 m20 |j1 j2 00i
1
1
2
2
ahora utilizamos
hj1 j2 m1 m2 |j1 j2 00i = δj1 j2 δm1 ,−m2
Ricardo Ramı́rez
Facultad de Fı́sica, Pontificia Universidad Católica, Chile
(−1)j1 −m1
2j1 + 1
MECANICA CUANTICA AVANZADA FIM 8440
(6)
Rotaciones y Operadores Tensoriales
entonces haciendo m1 → −m1 y m10 → −m10
Z
0
(j )
(j )
2j1 −m1 −m1
1
dm20 m (ω) =
dωd−m
0 ,−m (ω)(−1)
1
1
δj1 j2 δm1 m2 δm0 m0
1
2
2
2j + 1
2
pero de (6)
0
(j )
∗(j )
2j1 −m1 −m1
1
1
(ω)
= dm 0 m
d−m
0 ,−m (ω)(−1)
1
1
1
1
y ası́ obtenemos la relación de ortogonalidad de las representaciones
Z
(j )
(j )
dωdm10 m (ω)dm20 m (ω) =
δj1 j2 δm1 m2 δm0 m0
1
2
2j + 1
Como caso particular consideremos el carácter de la representación
1
1
2
2
(14)
χ(j) (ω) = Tr d (j) (ω)
entonces en la ecuación anterior hacemos m1 = m10 y m2 = m20 y sumamos c/r a m1 y
m2 y obtenemos la relación de ortogonalidad de los caracteres,
Z
dωχ(j1 ) (ω)χ(j2 ) (ω) = δj1 j2
Ricardo Ramı́rez
Facultad de Fı́sica, Pontificia Universidad Católica, Chile
MECANICA CUANTICA AVANZADA FIM 8440
(6)
Operadores Tensoriales
Operadores Tensoriales
El conjunto de los 2j + 1 estados |jmi, para un j fijo, se transforman entre
sı́ bajo rotaciones. Ahora estudiarmos las propiedades de la transformación
de los operadores bajo rotaciones. El significado de la transformación de un
operador A bajo la rotación ω está dado por la transformación unitaria
A0 = Rω ARω−1
(15)
El valor de expectación de A en |Φi es el mismo que el de A0 en Rω |Φi.
Un operador es escalar si no cambia bajo una transformación, i.e conmuta
con J. Otros operadores transforman como las componentes de un vector,
etc.
Ahora definimos un operador tensorial irreducible de orden k , T (k) , como el
(k )
conjunto de de 2k + 1 operadores Tq , −k ≤ q ≤ k , que transforma segun
Rω Tq Rω−1 =
(k)
k
X
q 0 =−k
Ricardo Ramı́rez
Facultad de Fı́sica, Pontificia Universidad Católica, Chile
(k )
(k)
Tq 0 dq 0 q (ω)
(16)
MECANICA CUANTICA AVANZADA FIM 8440
(6)
Operadores Tensoriales
(k )
Los coeficientes dq 0 q (ω) son elementos de matriz de la representación
irreducible del grupo de rotación de dimensión 2k + 1. Esto implica que no
(k)
existe un subconjunto de los elementos Tq que se transformen sólo entre
sı́ .
Consideremos una transformación infinitesimal
~
R~ = e−i J·~ ' 1 − i ~J · ~
entonces el lado izquierdo de (16) queda hasta el orden 1 como
(k)
(k )
(k)
(k )
(k)
(k )
(1 − i ~J · ~)Tq (1 + i ~J · ~) = Tq − i ~J · ~Tq + Tq i ~J · ~ = Tq − i[~J · ~, Tq ]
y el lado derecho
X (k )
X (k)
(k)
Tq 0 hkq 0 |1 − i ~J · ~|kqi = Tq − i~ ·
Tq 0 hkq 0 |~J|kqi
q0
q0
o sea
(k )
[~J, Tq ] =
X
Tq 0 hkq 0 |~J|kqi
(k )
q0
Ricardo Ramı́rez
Facultad de Fı́sica, Pontificia Universidad Católica, Chile
MECANICA CUANTICA AVANZADA FIM 8440
(6)
Operadores Tensoriales
De aquı́ obtenemos las relaciones para las componentes de ~J
X (k )
(k )
(k )
Tq 0 hkq 0 |Jz |kqi = qTq
[Jz , Tq ] =
(17)
q0
(k )
[J± , Tq ] =
X
(k )
(k )
Tq 0 hkq 0 |J± |kqi = Tq±1
p
k(k + 1) − q(q + 1)
(18)
q0
~ , el cual obedece las siguientes
Como ejemplo consideremos el operador vectorial V
relaciones de conmutación (que se puede demostrar a partir de (15)):
[Ji , Vj ] = iεijk Vk
Estas relaciones de conmutación deben ser equivalentes a (17) y (18) y por lo tanto
pueden ser utilizadas para obtener las componentes q de V . De esta manera se
puede encontrar
Vx + iVy
√
2
V(q=1)
=
−
V(q=0)
=
Vz
V(q=−1)
=
Vx − iVy
√
2
~.
estas componentes se llaman componentes esféricas de V
Ricardo Ramı́rez
Facultad de Fı́sica, Pontificia Universidad Católica, Chile
MECANICA CUANTICA AVANZADA FIM 8440
(6)
Operadores Tensoriales
Estas relaciones son similares a las rq
x + iy
r1 = − √
2
o
r0 = z
r−1 =
r
r
r1 = − sin θeiφ
r0 = r cos θ
r−1 = sin θe−iφ
2
2
r
r
4π
4π
rq =
rY1q (θ, φ) =
P1q (x, y , z)
3
3
donde
P1q (x, y , z) = rY1q (θ, φ)
~
Similarmente para un operador vectorial arbitrario V
r
4π
Vq =
P1q (Vx , Vy , Vz )
3
Ricardo Ramı́rez
x − iy
√
2
Facultad de Fı́sica, Pontificia Universidad Católica, Chile
MECANICA CUANTICA AVANZADA FIM 8440
(6)
Operadores Tensoriales
Generalización a tensores de cualquier orden
Sea
P`m (x, y , z) = r ` Y`m (θ, φ)
P`` = r ` Y`` (θ, φ) = c(x + iy)` es un polinomio homogéneo de grado `. Los
otros polinomios r ` Y`m (θ, φ) se pueden obtener operando con
∂
∂
∂
L− = Lx − iLy = i(x − iy )pz − iz(px − ipy ) = (x − iy)
−z
−i
∂z
∂x
∂y
Obviamente que L− mantiene el grado del polinomio.
Ahora demostraremos que P`,m (Vx , Vy , Vz ) es un tensor irreducible de orden
`. En primer lugar, ya que P`,m es un polinomio homogéneo
Rα P`,m (Vx , Vy , Vz )Rα−1 = P`,m (Vx 0 , Vy 0 , Vz 0 )
donde
Vx 0 = Rα Vx Rα−1
Ricardo Ramı́rez
Facultad de Fı́sica, Pontificia Universidad Católica, Chile
etc.
MECANICA CUANTICA AVANZADA FIM 8440
(6)
Operadores Tensoriales
por otra parte de (9) tenemos
Yjm (θ0 , φ0 ) =
X
(j)
Yjm0 (θ, φ)dm0 m (α)
m0
donde (θ0 , φ0 ) se obtiene al rotar (θ, φ) en el ángulo −|α| alrededor del eje z.
Luego
X
(j)
P`,m0 (Vx , Vy , Vz )dm0 m (α)
P`,m (Vx 0 , Vy 0 , Vz 0 ) =
m0
y por lo tanto
Rα P`,m (Vx , Vy , Vz )Rα−1 =
X
(j)
P`,m0 (Vx , Vy , Vz )dm0 m (α)
m0
esta es la ley de transformación que debe cumplir un operador tensorial
irreducible del orden `.
Ricardo Ramı́rez
Facultad de Fı́sica, Pontificia Universidad Católica, Chile
MECANICA CUANTICA AVANZADA FIM 8440
(6)
Operadores Tensoriales
(k)
Propiedades de Tq
(k )
• La operación Tq |η, j, mi da como resultado un estado con la componente
z igual a q + m. Aquı́ η se refiere a otros números cuánticos.
Consideremos una rotación alrededor del eje z en el ángulo φ
(k)
Rφ Tq |η, j1 , m1 i
=
=
Rφ Tq Rφ−1 Rφ |η, j1 , m1 i
X
X (k) (k )
(j )
|η, j1 , m10 idm10 m (φ)
Tq 0 dq 0 q (φ)
(k)
m10
q0
(k)
1
1
(19)
(20)
(k )
Recordando que dq 0 q (φ) = dq 0 q (φ, 0, 0), tenemos
dq 0 q (φ) = δq 0 q e−iqφ
(k )
y dm10 m (φ) = δm10 m1 e−im1 φ
(j )
1
1
entonces
Rφ Tq |η, j1 , m1 i = e−i(q+m1 )φ Tq |η, j1 , m1 i
(k )
Ricardo Ramı́rez
Facultad de Fı́sica, Pontificia Universidad Católica, Chile
(k )
(21)
MECANICA CUANTICA AVANZADA FIM 8440
(6)
Operadores Tensoriales
(k)
Vemos que Tq |η, j1 , m1 i transforma con el factor de fase e−i(q+m1 )φ . Esta es
precisamente la ley de transformación para un estado propio de Jz con valor
(k)
propio q + m1 . Ası́ Tq |η, j1 , m1 i es un operador que hace crecer el valor
propio de Jz en q.
(k )
Sin embargo los estados Tq |η, j1 , m1 i no son estados propios de J 2 , pero
podemos construirlos a partir de combinaciones lineales de los estados
(k )
Tq |η, j1 , m1 i mediante los coeficientes de Clebsch-Gordan. En realidad
X (k )
|η̃, jmi =
Tq |η, j1 , m1 ihkj1 qm1 |kj1 jmi
(22)
qm1
es un estado propio de J 2 , como veremos ahora. En primer lugar es un
estado propio de Jz , ya que de (21), |η̃, jmi es una combinación lineal de
estados propios de Jz .
Consideremos una rotación cualquiera R y apliquémosla al estado (22)
X
(k )
R|η̃, jmi =
(RTq R −1 )R|η, j1 , m1 ihkj1 qm1 |kj1 jmi
qm1
Ricardo Ramı́rez
Facultad de Fı́sica, Pontificia Universidad Católica, Chile
MECANICA CUANTICA AVANZADA FIM 8440
(6)
Operadores Tensoriales
usando
RTq R −1 =
(k )
X
(k )
(k)
Tq 0 dq 0 q
q0
y
R|η, j1 , m1 i =
X
dm10 m |η, j1 , m10 i
(j )
1
m10
R|η̃, jmi
=
X
Tq 0 |η, j1 , m10 i
(k )
q 0 m10
y utilizando
(12)
=
X
qm1
1
(k )
(j )
dq 0 q dm10 m hkj1 qm1 |kj1 jmi
1
1
y la ortogonalidad de los coeficientes de Clebsch Gordan
X (k)
(j)
Tq 0 |η, j1 , m10 ihkj1 q 0 m10 |kj1 jm0 idm0 m
q 0 m10 m0
=
X
|η̃, jm0 idm0 m
(j)
m0
Vemos que |η̃, jmi se transforma como un estado propio del momento
angular con números cuánticos j, m, i.e. un estado propio de J 2
Ricardo Ramı́rez
Facultad de Fı́sica, Pontificia Universidad Católica, Chile
MECANICA CUANTICA AVANZADA FIM 8440
(6)
Operadores Tensoriales
• Consideremos el producto hη 0 j 0 m0 |η̃jmi, que es cero a menos j = j 0 y
m = m0 . Vamos a demostrar que este producto es independiente de m. Para
esto introducimos el operador unidad,
Z
dωRω−1 Rω = I
hη 0 j 0 m0 |η̃jmi =
Z
dωhη 0 j 0 m0 |Rω−1 Rω |η̃jmi
Usando (1) tenemos
hη 0 j 0 m0 |η̃jmi =
XZ
∗(j 0 )
dωdm̄0 m0 (ω)dm̄m (ω)hη 0 j 0 m̄0 |η̃j m̄i
(j)
m̄m̄0
Usando la relación (14), vemos que la integral c/r a ω vale
δj 0 j δm̄m̄0 δmm0
2j + 1
lo que nos da
hη 0 j 0 m0 |η̃jmi = δj 0 j δmm0
X hη 0 j 0 m̄|η̃j m̄i
2j 0 + 1
m̄
Ricardo Ramı́rez
Facultad de Fı́sica, Pontificia Universidad Católica, Chile
MECANICA CUANTICA AVANZADA FIM 8440
(6)
Operadores Tensoriales
Vemos que los elementos hη 0 j 0 m0 |η̃jmi son diagonales e independientes de
m.
• Ahora tomamos la ecuación (22) y la multiplicamos a la izquierda por
hη 0 j 0 m0 | y obtenemos
hη 0 j 0 m0 |η̃jmi =
X 0 0 0 (k)
δj 0 j δm0 m X 0 0
hη j m |Tq |ηj1 m1 ihkj1 qm1 |kj1 jmi = 0
hη j m̄|η̃j 0 m̄i
2j
+
1
qm
m̄
1
Pero la ortogonalidad de los coeficientes de Clebsch-Gordan nos da
hη 0 j 0 m0 |Tq |ηjmi =
(k )
X hη 0 j 0 m̄|η̃j 0 m̄i
hkjqm|kjj 0 m0 i
2j 0 + 1
(23)
m̄
Es costumbre escribir la suma c/r a m̄ como
X 00
p
(k )
hη j m̄|η̃j m̄i = 2j 0 + 1hη 0 j 0 k Tq k η̃ji
m̄
El elemento de matriz del lado derecho se llama elemento de matriz reducido
Ricardo Ramı́rez
Facultad de Fı́sica, Pontificia Universidad Católica, Chile
MECANICA CUANTICA AVANZADA FIM 8440
(6)
Operadores Tensoriales
Ası́ finalmente (23) se escribe como
(k )
hη 0 j 0 m0 |Tq |ηjmi =
(k)
hη 0 j 0 k Tq k ηji
p
hkjqm|kjj 0 m0 i
2j 0 + 1
(24)
Este es el Teorema de Wigner-Eckart que muestra que el elemento de matriz
de un operador tensorial entre dos estados propios de momento angular,
queda factorizado en un coeficiente de Clebsch-Gordan que contiene la
dependencia angular, pero es independiente de la dinámica y un coeficiente
independiente de m, m0 y q, pero que contiene la dinámica.
EJEMPLOS de W-E
Elementos de matriz del operador escalar S (0) . Aquı́ k = 0 y q = 0 y
hη 0 j 0 m0 |S (0) |ηjmi = h0j0m|0jj 0 mi
Ricardo Ramı́rez
hη 0 j k S (0) k ηji
hη 0 j k S (0) k ηji
p
p
= δjj 0 δmm0
0
2j + 1
2j 0 + 1
Facultad de Fı́sica, Pontificia Universidad Católica, Chile
MECANICA CUANTICA AVANZADA FIM 8440
(6)
Operadores Tensoriales
Elementos de matriz de Jq
hη 0 j 0 m0 |Jq |ηjmi = h1jqm|1jj 0 m0 i
hη 0 j 0 k Jq k ηji
p
2j 0 + 1
Para evaluar hη 0 j 0 k Jq k ηji, usamos (24), donde podemos usar
cualquier valor de q, ya que el elemento reducido no depende de q.
Entonces tomamos q = 0, y recordando que J0 = Jz , obtenemos
hη 0 j 0 m0 |J0 |ηjmi = δηη0 δjj 0 δmm0 m = h1j0m|1jj 0 m0 i
hη 0 j k Jq k ηji
p
2j 0 + 1
y por lo tanto el elemento reducido es nulo para j 0 6= j. Ahora usando
m
h1j0m|1jjmi = p
j(j + 1)
obtenemos
Ricardo Ramı́rez
p
hη 0 j k Jq k ηji
p
= δηη0 δjj 0 j(j + 1)
0
2j + 1
Facultad de Fı́sica, Pontificia Universidad Católica, Chile
MECANICA CUANTICA AVANZADA FIM 8440
(6)
Operadores Tensoriales
y finalmente
hη 0 j 0 m0 |Jq |ηjmi = δηη0 δjj 0
p
j(j + 1)h1jqm|1jjm0 i
(k )
(k 0 )
Consideremos ahora el producto de dos operadores tensoriales Tq Wq 0 .
Se puede demostrar que este producto no es un operador tensorial
irreducible. Sin embargo la siguiente combinación lineal lo es:
X (k) (k 0 )
(j)
Tq Wq 0 hkk 0 qq 0 |kk 0 jmi
Zm =
qq 0
Para probarlo apliquemos una rotación
X
(j)
(k)
(k 0 )
RZm R −1 =
(RTq R −1 )(RWq 0 R −1 )hkk 0 qq 0 |kk 0 jmi
qq 0
=
XX
(k 0 )
(k 0 )
Tq̄ Wq̄ 0 dq̄q dq̄ 0 q 0 hkk 0 qq 0 |kk 0 jmi
(k)
(k )
qq 0 q̄ q̄ 0
Entonces utilizando (12) podemos escribir
X (j) (j)
(j)
RZm R −1 =
Zm0 dmm0
m0
Ricardo Ramı́rez
Facultad de Fı́sica, Pontificia Universidad Católica, Chile
QED
MECANICA CUANTICA AVANZADA FIM 8440
(6)
Operadores Tensoriales
Justificación del operador de rotación
Consideremos un vector de posición ~r que sufre una rotación
alrededor del eje α̂ en el ángulo infinitesimal α. Entonces el vector de
posición rotado es
~r 0 = ~r + αα̂ × ~r = ~r + α
~ × ~r
(25)
donde α
~ = αα̂. Sin embargo sabemos que el operador momento
angular satisface los conmutadores:
[Li , rj ] = i~ijk rk
usando esta relación para la componente de ~L en la dirección α̂
[α̂ · ~L, ~r ] = −i~α̂ × ~r
o
[~
α · ~L, ~r ] = −i~~
α × ~r
Ricardo Ramı́rez
Facultad de Fı́sica, Pontificia Universidad Católica, Chile
(26)
MECANICA CUANTICA AVANZADA FIM 8440
(6)
Operadores Tensoriales
y reemplazando esto en (25) tenemos
~r 0 = ~r +
i
[~
α · ~L, ~r ]
~
Pero como la rotación α
~ es infinitesimal, esta expresión se puede
escribir como
~
~
~r 0 = ei α~ ·L/~~r e−i α~ ·L/~
(27)
Se puede demostrar que esta expresión es válida aun cuando α
~ no
es infinitesimal. Para esto consideremos el vector de posición ~r 0 (|α|)
ya rotado en el ángulo |α| finito. Entonces si lo rotamos un poco más
en el ángulo muy pequeño δ|α| alrededor del eje α̂ tenemos que
~r 0 (|α| + δ|α|) = ~r 0 (|α|) + δ|α|α̂ × ~r 0 (|α|)
es decir
Ricardo Ramı́rez
d~r 0 (|α|)
= α̂ × ~r 0 (|α|)
d|α|
Facultad de Fı́sica, Pontificia Universidad Católica, Chile
(28)
MECANICA CUANTICA AVANZADA FIM 8440
(6)
Operadores Tensoriales
Ahora podemos demostrar que el valor de ~r 0 dado en (27) es la
solución de la ecuación diferencial anterior. Para esto derivamos (27)
c/r a |α|:
d~r 0 (|α|)
d|α|
~
= ei α~ ·L/~
i
i
~
α
~ · ~L~r − ~r α
~ · ~L e−i α~ ·L/~
~
~
~
~
= ei α~ ·L/~ (α̂ × ~r )e−i α~ ·L/~ = α̂ × ~r 0
Ası́ vemos que (27) para una rotación finita satisface (28). Q.E.D.
La ecuación (26) es válida también para los operadores vectoriales
~ se define como aquellos que
~p, ~L y otros. Un operador vectorial V
cumplen una ecuación similar a (26), i.e.
[Li , Vj ] = i~ijk Vk
Ricardo Ramı́rez
Facultad de Fı́sica, Pontificia Universidad Católica, Chile
MECANICA CUANTICA AVANZADA FIM 8440
(6)
Operadores Tensoriales
o en general
[Ji , Vj ] = i~ijk Vk
de esta manera si seguimos los mismos pasos que llevaron a la
demostración que el operador exp(−i α
~ · ~L) rota el vector ~r en α
~,
podemos demostrar que el operador exp(−i α
~ · ~J) rota en α
~ un
~ y ası́ justificar la definición (15).
operador vectorial cualquiera V
Ricardo Ramı́rez
Facultad de Fı́sica, Pontificia Universidad Católica, Chile
MECANICA CUANTICA AVANZADA FIM 8440
(6)
Operadores Tensoriales
WE
hη 0 j 0 m0 |η̃jmi =
X
(k)
hη 0 j 0 m0 |Tq |η̃j1 m1 ihkj1 qm1 |kj1 jmi =
qm1
δ j 0 j δm 0 m X
2j 0 + 1
hη 0 j 0 m̄|η̃j 0 m̄i
m̄
Ahora multiplicamos por hkj1 jm|kj1 q 0 m10 i y sumamos c/r a j, m
X
(k)
hη 0 j 0 m0 |Tq |η̃j1 m1 ihkj1 qm1 |kj1 jmihkj1 jm|kj1 q 0 m10 i
qm1 ,jm
=
X
hkj1 jm|kj1 q 0 m10 i
jm
X
(k )
hη 0 j 0 m0 |Tq |η̃j1 m1 iδqq 0 δm1 m0
1
qm1
δj 0 j δm 0 m X
2j 0 + 1
=
=
hη 0 j 0 m̄|η̃j 0 m̄i
m̄
(k )
hη 0 j 0 m0 |Tq 0 |η̃j1 m10 i
2j 0
X
1
hη 0 j 0 m̄|η̃j 0 m̄ihkj1 j 0 m0 |kj1 q 0 m10 i
+1
m̄
haciendo j1 = j y m10 = m,
(k )
hη 0 j 0 m0 |Tq 0 |η̃jmi =
X
1
hη 0 j 0 m̄|η̃j 0 m̄ihkjj 0 m0 |kjq 0 mi
2j 0 + 1
m̄
Ricardo Ramı́rez
Facultad de Fı́sica, Pontificia Universidad Católica, Chile