- Ninguna Categoria
Telecontrol de redes eléctricas
Anuncio
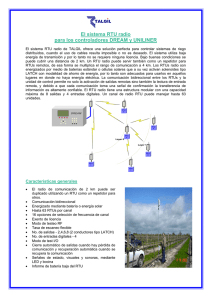
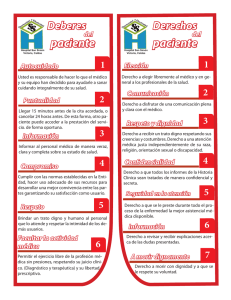
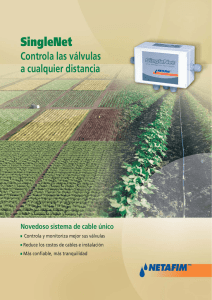
| Electricidad ENTREGA 1 Telecontrol de redes eléctricas Elaborado por José Ignacio Escudero y Joaquín Luque Rodríguez, Universidad de Sevilla, Departamento de Tecnología Electrónica. Introducción Una red o un sistema eléctrico se compone básicamente de dos elementos: por un lado tendremos plantas generadoras de energía eléctrica y por otro a los consumidores de esa energía. La conexión entre esas dos partes se efectúa mediante una red de transmisión que, por razones técnico-económicas, se configura en una estructura jerárquica con varios niveles de tensión de transporte, reparto y distribución (como puede verse en la figura 1). El paso de un nivel de tensión a otro se efectúa en centros denominados subestaciones transformadoras, dotados, tanto de los propios transformadores, como de los sistemas necesarios de protección y maniobra. El transporte y distribución de esa energía eléctrica desde los puntos de generación hasta los de consumo se basa en un conjunto de técnicas en constante evolución desde los comienzos de esta actividad hasta nuestros días. Las líneas o caminos únicos han ido dejando paso a una situación en la que se garantiza al consumidor el suministro de energía a través de diversas rutas alternativas, multi-enlazadas entre sí, hasta constituir una urdimbre que es la red eléctrica. Además, la penetración en las costumbres sociales del uso de la electricidad hace recaer mayor responsabilidad sobre las compañías suministradoras, que deberán garantizar la continuidad del servicio para el normal desenvolvimiento de una sociedad moderna. Todo ello provoca una creciente complejidad en la planificación, gestión y explotación de una red eléctrica, para lo cual se trata de encontrar técnicas que ayuden a la resolución de dichas tareas, una de las cuales es sin duda la automatización en el control de la red. Pero la mejora en la calidad y seguridad del servicio no es el único argumento que nos lleva a dicha automatización. Por ejemplo, el carácter geográficamente disperso de la red, con gran número de subestaciones y centrales, obliga a mantener en cada uno de estos enclaves un equipo de técnicos a turnos ocupados en tareas de vigilancia y preparados para actuar en caso de necesidad. Es fácil comprender que la automatización de dichas funciones podría justificarse, en muchos casos, desde una perspectiva exclusivamente económica. Por tanto la extensión y complejidad de operación de las redes de servicios, y en particular de las redes eléctricas, 18 | Interconexión Transporte Reparto 132 - 220 - 380 KV 45 - 66 132 KV Distribución 45 - 66 132 KV Abonados muy grandes Grandes abonados 15-20 KV Abonados medios Figura 1. Estructura de la red eléctrica ha llevado a la generalización de los sistemas de control que automatizan en cierta medida su explotación, siendo estos concebidos como elementos que mejoran la calidad del servicio disminuyendo los costes. Aparte de las consideraciones previas hay que tener en cuenta también que la automatización de las redes ha sido algo buscado desde sus comienzos. Ya en 1890 existían patentes para control remoto y entre los años 1920 y 1940 se desarrollan varios sistemas comerciales en esta área. Sin embargo, es en la década de los sesenta, con el advenimiento del minicomputador, cuando los sistemas de control de redes sufren una evolución vertiginosa, apuntando ya las características de los actuales centros de control. En líneas generales diremos que un sistema de control está formado por un centro de control, o un conjunto de centros de control jerarquizados [CHIH-90], y un conjunto de unidades de transmisión remotas RTU (Del inglés: RTU = Remote Terminal Unit) conectadas al centro de control. En la figura 2 se puede ver una posible estructura de un sistema de control. De esta manera es posible un trasvase de información entre cada remota y el centro de control y vi- | Electricidad ceversa. En este documento veremos la estructura de las redes eléctricas así como sus componentes y el modo de funcionamiento de los mismos. Centro de control Nacional Centro de control Regional Centro de control Provincial Centro de control Regional RTU RTU RTU RTU RTU RTU RTU RTU RTU Figura 2. Posible estructura de un sistema de control Sistemas de control La palabra control es un término genérico que en algunas ocasiones puede llevar a confusión. Por ello es interesante dejar claro que, para nosotros, este término implica no sólo el concepto de actuación sino que, también, le añade la idea de monitorización o presentación de datos en el centro de control del sistema, lo que implica la adquisición de datos del campo por las estaciones remotas. En sus primeros años las misiones encomendadas a los sistemas de control eran bastantes simples así como los componentes y las técnicas empleadas. Había muy poca elección en los tipos de componentes disponibles: todos eran de tipo electro-mecánico. Los sistemas de control empleaban componentes de estado sólido, sensores electrónicos y convertidores analógico- digitales. Incluso las estaciones remotas, dentro de una primera evolución de los sistemas de control continuaban estructuradas como en sus comienzos ya que las empresas implicadas en las mismas no buscaban una alternativa a la prestación de funciones de las mismas. Sin embargo, en los años ochenta se empiezan a aplicar nuevas técnicas de diseño de estaciones remotas de manera que nos encontramos remotas que usan microprocesadores, lo que ha aumentado considerablemente las prestaciones que ofrece una remota, y ha abierto un vasto campo de posibilidades para el futuro. Los sistemas de control, que comprenden instalaciones de telemedidas, poseen cada vez más una mayor cantidad de aplicaciones distintas de las iniciales, sobre todo en el sector 1 Del inglés: SCADA = Supervisory Control And Data Acquisition 2 También del inglés: EMS = Energy Management System 3 Centro de control 20 | eléctrico. Aquello que en sus comienzos empezó siendo un sistema de supervisión, control y adquisición de datos, sistema SCADA1, se ha ido convirtiendo con el tiempo en sistema de administración de energía ó EMS2 [KIM -90], [WAHA-92]. Por ello el sistema de control se convierte, hoy en día, en un sistema de supervisión con un amplio abanico de aplicaciones de control: generación, transmisión y distribución de energía sobre áreas geográficas muy grandes, adquiriendo datos del campo y suministrando información a los centros de control y operación. Todo esto le va a permitir llevar a cabo muchas tareas de manera automatizada, algunas de las cuales son: el despacho de energía, la resolución de problemas producidos por restricciones de carga o “caídas” de tensión, el cálculo de las previsiones de demanda de la red, etc. Por todo lo que hemos visto más arriba es por lo que las normas ANSI C37.1 [ANSI-87] definen el sistema de administración de energía, denominado genéricamente sistema de supervisión, como el conjunto de elementos de control, indicadores y equipos de telemedidas asociados a la estación principal3, así como todos los dispositivos complementarios que se encuentren tanto en las subestaciones como en las propias remotas. La estructura de un sistema de control puede estar gobernada por un conjunto de centros jerarquizados de control o en paralelo que comparten información o se trasvasa entre ellos. Por ello en los siguientes apartados consideraremos los componentes básicos de un sistema de control (Figura 3) que son: centro de control, unidad de transmisión remota RTU y medio de comunicación entre ellos, desarrollando su estructura, sus componentes y sus características de funcionamiento. Centro de control Los sistemas de control de redes eléctricas tienen la misión de ejercer el control sobre determinados dispositivos y confirmar que este control se produce de forma adecuada. Al conjunto de dispositivos, módulos funcionales e interfaces con los canales de comunicación que permitan llevar a cabo correctamente las funciones de supervisión se le da el nombre de centro de control [ANSI-87]. En esta definición el concepto “control” implica todo tipo de control, asociando los equipos de telemedida al centro de control así como cualquier dispositivo complementario que en la remota exista. En sus comienzos los centros de control sólo llevaban a cabo las funciones SCADA, que veremos más adelante. Con el tiempo se le fueron añadiendo otras funciones diferentes hasta conseguir lo que hemos llamado un sistema de gestión de energía EMS. Para llevar a cabo todas estas tareas, el centro de control en particular, y el sistema de control en general, debe estar diseñado bajo las premisas de fiabilidad, estabilidad y seguridad, economía. | Electricidad Medios de comunicación Centro de control Hombre máquina Software Ordenador Adaptador I N T Adaptador E R F A Adaptador Z Remotas Modem RTU Modem Modem RTU Modem Modem RTU Modem Modem RTU Campo Figura 3. Configuración típica de un sistema de control La consecución de estas tres premisas fue un gran paso hacia adelante en la ampliación de las posibilidades de uso de los centros de control. De las tres, la más significativa es la de seguridad y por ello vamos a ver más en profundidad lo que esto implica. Las condiciones de operación de un sistema se puede dividir en tres categorías o estados diferentes: estado normal, estado de emergencia y estado de restauración [DYLI- 77]. El primero de ellos, el estado normal, ocurre cuando los límites de operación y carga son satisfechos por el sistema. Es razonable y deseable suponer que éste sea el estado en el que generalmente se encuentre el sistema cuando se encuentra en un estado de cuasi-equilibrio. Un sistema está en estado de emergencia cuando los límites de operación no se satisfacen completamente. Existen dos tipos de emergencias: a) Cuando se violan únicamente los límites de operación en el estado de cuasi-equilibrio, por ejemplo, cuando los límites de carga de un equipo se sobrepasan o la tensión en una línea es inferior a lo previsto. b) Cuando se violan los límites de operación en estabilidad y como resultado de ello peligra la estabilidad del sistema. El primero de ellos recibe el nombre de “emergencia de estado de equilibrio” mientras que el segundo se conoce como “emergencia dinámica”. El estado de restauración ocurre cuando en el sistema no se satisfacen los límites de carga y como consecuencia de ello el sistema completo o una parte de él se “cae”. En caso de que sea una parte del sistema la que se “caiga” el resto puede encontrarse en estado de emergencia. Naturalmente en estos casos la actuación del centro de control debe ser inmediata ya que se pueden suceder en cascada las “caídas” de otras partes del sistema, deteriorándolo aún más. Al dividir el estado de operación de un sistema de potencia en tres estados posibles, estamos subdividiendo a su vez 22 | el problema general de funcionamiento en tres subproblemas, de los cuales el más significativo, desde el punto de vista del diseño y utilización del centro de control, será el relativo al funcionamiento y operación del sistema cuando éste se encuentre en el estado normal, estado en el que debe de encontrarse la mayor parte del tiempo. Por tanto la misión del centro de control consistirá en mantener al sistema en el estado normal de operación, previniendo o minimizando el paso a otro estado diferente no deseado. Para realizar una estrategia efectiva que nos permita llevar a cabo este objetivo vamos a desarrollar más detenidamente el concepto de seguridad del sistema. La seguridad de un sistema se puede considerar como la capacidad que tiene ese sistema de enfrentarse a una perturbación del mismo sin pasar a un estado de emergencia. Si eso ocurre diremos que el sistema es seguro. Para ello el propio sistema posee un conjunto de posibles contingencias clasificadas en seguras e inseguras, de manera que el sistema de control, para conseguir su propósito de prevenir o minimizar el paso del estado normal a cualquier otro estado de emergencia, debería ser capaz de saber si se encuentra o no en el estado normal. Si éste es el caso determinar si la contingencia que se presenta es segura o insegura y si es insegura ser capaz de determinar qué acciones son necesarias realizar para volver a un estado normal seguro. Todo esto ha llevado a integrar el control de la generación y el control de la transmisión, antes dispersas, en un único sistema. Para sistemas de control geográficamente poco dispersos esta integración se lleva a cabo con un único centro de control. Para sistemas más grandes es necesario llevar a cabo esta integración mediante el uso de varios niveles de centros de control en una jerarquía de ordenadores. Continuará...
 0
0
Anuncio
Documentos relacionados


Descargar
Anuncio
Añadir este documento a la recogida (s)
Puede agregar este documento a su colección de estudio (s)
Iniciar sesión Disponible sólo para usuarios autorizadosAñadir a este documento guardado
Puede agregar este documento a su lista guardada
Iniciar sesión Disponible sólo para usuarios autorizados