resonancia subsincrona utilizando el metodo de analisis
Anuncio

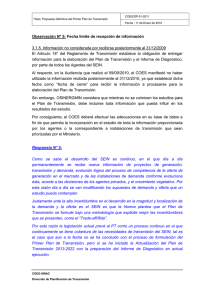
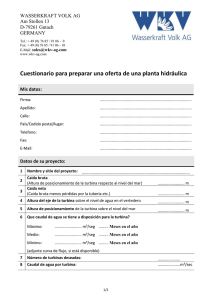
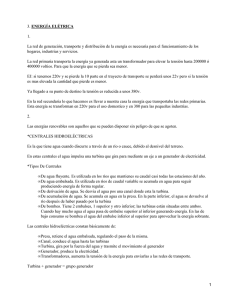
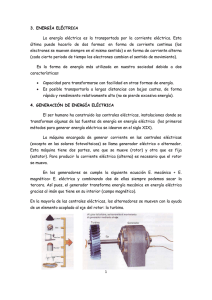
RESONANCIA SUBSINCRONA UTILIZANDO EL METODO DE ANALISIS MODAL, APLICACIÓN A UN CASO REAL DEL SEIN INTRODUCCIÓN La Resonancia Subsíncrona comenzó a estudiarse en la década de los setenta, a partir del daño físico que se presentó en el eje del grupo turbina-generador de la central térmica de vapor Mohave de Southern California Edison, Estados Unidos entre 1970 y 1971. Esta condición en la central térmica de Mohave fue causada por las oscilaciones que se amplificaron, por la condición de inestabilidad de estado estacionario del sistema de potencia, que causó daños a los ejes del generador por un calentamiento excesivo debido a las vibraciones mecánicas producidas por el fenómeno de la Resonancia Subsíncrona. Este suceso ocurrido en la central de Mohave marcó un hito importante y mostró que los sistemas mecánicos de un turbogenerador pueden interactuar con los sistemas eléctricos que tienen líneas largas con compensación serie, provocando un fenómeno de carácter destructivo. En el Perú, en julio 2011, fue incrementado el grado de compensación serie de la Línea de interconexión Centro-Sur de 220 kV MantaroCotaruse-Socabaya de 50% a 65%. De otro lado, en el año 2012 se han puesto en servicio los ciclos combinados de las centrales térmicas Kallpa y Chilca 1, por lo cual, hacia el año 2014 en la zona de Chilca, estarán en operación 756 MW de unidades turbovapor, considerando a la CT Fénix. Asimismo, en el 2014 está prevista la operación de la línea de transmisión de 500 kV Chilca-Marcona-Ocoña-Montalvo que tendrá capacitores en serie con un grado de compensación del 50 %. Estos cambios importantes en el sistema eléctrico peruano presentarán los dos elementos requeridos para la aparición del fenómeno de Resonancia Subsíncrona: unidades turbovapor y líneas de transmisión de gran longitud con capacitores en serie. Las razones mencionadas han justificado que en el marco de las actividades de los Estudios de Pre Operatividad, para aprobar los nuevos equipamientos a integrar el sistema interconectado peruano, el COES SINAC ha iniciado la investigación de los fenómenos de resonancia Subsíncrona con el presente trabajo. 1. METODOS DE ANALISIS Existen diferentes métodos para el análisis del fenómeno de resonancia subsíncrona. Para análisis preliminares se puede usar el método de “barrido de frecuencia” que consiste en calcular la reactancia y resistencia equivalente de la red vista desde el rotor del generador para diferentes valores de frecuencia. Esta técnica es efectiva en el análisis del efecto de generador de inducción. Este análisis está dirigido a determinar si las corrientes subsíncronas resultaran sostenidas por el fenómeno de autoexcitación, cuya existencia se da cuando el circuito equivalente generador de inducción - red es resonante a una frecuencia subsíncrona y presente una resistencia equivalente negativa a esta misma frecuencia. Página 1 de 6 SEGUNDO SEMESTRE DE 2012 Resonancia Subsíncrona Es una condición del sistema eléctrico de potencia que utiliza compensación serie capacitiva para incrementar su capacidad de transmisión, en la cual la red eléctrica intercambia energía con el turbogenerador, en una o más de las frecuencias naturales del sistema, que están por debajo de la frecuencia síncrona. Efecto Generador de Inducción El efecto de generador de inducción es provocado por la autoexcitación del sistema eléctrico como resultado de una f.m.m. producida por las corrientes de frecuencia subsíncrona, que es vista desde el rotor con deslizamiento negativo y por ende en una resistencia equivalente negativa. Cuando esta resistencia negativa iguala o supera a la resistencia externa del sistema, y si además el sistema eléctrico presenta resonancia RLC a esta frecuencia subsíncrona, dará las condiciones para que la autoexcitación sea mantenida generando altas corrientes subsíncronas. Interacciones Torsionales El efecto de interacción torsional involucra la existencia simultánea de resonancia eléctrica en la red y de resonancia torsional mecánica en el sistema de masas en el eje rotante. Ambas resonancias se realimentan a través del entrehierro del generador, cuando las condiciones del sistema electromecánico constituido por esa unidad turbovapor y la red proveen amortiguamiento equivalente negativo o nulo. Torques Transitorios Las perturbaciones en la red dan origen a fenómenos transitorios que provocan abruptos cambios de las corrientes en la red Su efecto sobre los generadores conectados al sistema es producir torques transitorios que dan lugar a un proceso oscilatorio de las masas rotantes del eje como superposición de los modos mecánicos torsionales. COES – SINAC, Dirección de Planificación de Transmisión constantes viscosos. Esto se logra observando las frecuencias en que la reactancia resulta nula y el signo del valor de la resistencia correspondiente. Para análisis posteriores se pueden usar métodos como el análisis modal y el análisis en el dominio del tiempo, este último es utilizado para analizar el efecto de torque transitorio. elásticas 1.1. Análisis Modal px =Ax + Bu En general para la masa j se obtiene: 1 0 Dj K ji K jk 0 ( ) ( ) ( ) T j j 2H j0 j 0 2H j j i 2H j j k pu pj pu (4) (5) Aplicando este modelo a un sistema de 6 masas y linealizando se obtiene: (1) I 6 x 6 04 x 6 0 p 6x6 T U K D 6 x6 6 x 6 4 x6 (6) Donde: K es la matriz de constantes elásticas y D la matriz de amortiguamiento. 2.3. Modelo De La Red Normalmente la red se representa mediante ecuaciones algebraicas, con lo cual V e I se expresan mediante fasores, ignorando sus derivadas en el tiempo. Sin embargo, las corrientes subsíncronas aparecen en notación fasorial con una componente variable en el tiempo. Las derivadas en el tiempo no pueden dejarse de lado, con lo cual se debe utilizar un modelo dinámico para la red. Las derivadas del fasor puede ser usado para fijar un modelo de estado para estas dinámicas de la red. MODELO DEL SISTEMA GENERADOR CON COMPENSACION SERIE CON UNA BARRA INFINITA E q j(Xd-Xq)Id Eq’ Figura 1. jXqI Re 2.1. Modelo Del Generador RI V Im Linealizando el modelo de 6to orden de la maquina síncrona y representándolo en forma matricial se obtienen las ecuaciones: p I L1 R[ I ] L1W [ V ] L1 M [ X e ] pu p j 0 j Los eigenvalores se obtienen de la matriz de estados (A) del sistema y su parte imaginaria representa la frecuencia de oscilación del modo, mientras que la parte real hace referencia al amortiguamiento de esta oscilación. Si la parte real de todos los eigenvalores es positiva, el sistema es inherentemente inestable. Con este método se puede analizar el efecto de generador de inducción y la interacción torsional. Este análisis está dirigido a detectar la aparición y sostenimiento del efecto de interacción torsional en la unidad generadora. Vb δ δ (2) Te Tedq I d (3) 2.2. Modelo Del Eje Turbina-Generador En la Figura 2 se muestra el modelo de masas general usado en el modelamiento del eje turbinagenerador, constituido por masas concentradas caracterizadas por las constantes de inercia equivalentes de cada etapa y/o componente vinculados por resortes definidos por sus Página 2 de 6 amortiguamientos Figura 2. Este método es aplicado en el presente trabajo. Provee información de las diferentes frecuencias naturales involucradas en el modelo, así como su amortiguamiento, para lo cual se requiere las ecuaciones diferenciales linealizadas del sistema, en la forma: 2. y Figura 3. De la Figura 3 se obtiene: VR R I R VL L (7) d IL ZL I L dt (8) IC C dVC YC VC dt (9) COES – SINAC, Dirección de Planificación de Transmisión Linealizando estas ecuaciones se obtiene la ecuación matricial: vCd 0 0 vCd 0 XC 0 id vCqo p v 0 X i v 0 0 C q Cq Cq 0 -vCdo RL V XL (10) B A I H E B A I H ... id iq i fd i1D i1Q i2Q ... vCd De la Figura 4: CV PH PI PA v fd ER ESB ... Figura 4. (19) Donde las variables de estado son: X [E Barra Infinita p X A X B U XC Vb linealizado para el análisis modal del sistema generador, línea de transmisión con compensación serie unida a una barra infinita: (20) vCq ]T V ZL I VC Vb (11) Expresando esta ecuación en coordenadas d-q y luego linealizando se obtiene: vd RL XL id XL v q XL RL iq 0 XL Iqo v coso id vCd 0 bo p i v -vboseno q Cq X L I do 0 3. Aplicación del Análisis Modal 3.1. Parámetros Para el análisis se utilizó el “First Benchmark Model” [REFERENCIA], mostrado en la Figura 5. (12) 2.4. Modelo del regulador de velocidad Las ecuaciones velocidad son: linealizadas del regulador 1 0 0 0 T g Kg 1 CV CV FH 1 T T 0 0 go g P P T T Pmo H H ch ch 0 p 0 PI PI FI K H 0 0 0 0 F T T P P H rh rh A A 0 0 FA 1 0 0 FT Tco I co Expresando esta ecuación matricial compacta se obtiene: p X RV ARV X RV BRV U RV Donde: X RV CV PH PI de PA de Figura 5. Se implemento un programa en MATLAB usando el modelamiento anteriormente descrito. 3.2. Resultados (13) forma (14) (15) En primer lugar se calcularon los modos torsionales del modelo de 6 masas del eje turbina-generador, que tendrá tantas frecuencias naturales de oscilación como el número de masas que lo conforman correspondiéndole a cada masa un modo natural. Utilizando el programa en MATLAB se obtienen las siguientes frecuencias correspondientes a cada modo: Tabla 1 2.5. Modelo del regulador de tensión Las ecuaciones linealizadas del regulador de tensión son: KE TE v fd p ER 0 ESB KK L A F ad TETF Rfd 1 K fd TE Lad 1 TA KA TFTE 0 v 0 fd KA K ER A TA TA ESB 1 0 TF 0 KA Vt TA Eref 0 p X RT ART X RT BRT U RT X RT v fd E R ESB Modo 0 fm0 0.00 Frecuencias Modales (Hz) Modo 1 Modo 2 Modo 3 Modo 4 Modo 5 fm1 fm2 fm3 fm4 fm5 15.71 20.21 25.55 32.28 47.46 Tal como muestran los resultados de la tabla 1 las frecuencias de los modos torsionales son menores a la frecuencia síncrona (60 Hz) por lo cual son denominadas frecuencias subsíncronas. (16) (17) (18) En la Figura 6 se muestra la actividad relativa de cada modo correspondiente a cada masa del modelo del eje turbina-generador estos valores corresponden a los vectores propios derechos normalizados. Uniendo los modelos del generador, el eje de la turbina-generador, la red y los reguladores se obtiene la ecuación matricial que corresponde al modelo Página 3 de 6 COES – SINAC, Dirección de Planificación de Transmisión TGEN wHP THP HP TIP wIP IP TLPA TEXC wLPA LPA TLPB Frecuencias de los modos wEXC wLPB LPB 60 wGEN GEN Hz EXC 50 40 30 20 10 0 1 10 19 28 37 46 55 64 73 82 Porcentaje de compensación % Modo 5 Modo 4 Modo 3 Modo 2 Modo 1 Frecuencia Electrica Figura 7. El Modo Inercial o Modo Cero le corresponde la menor frecuencia natural que es igual a cero (Modo Local), en este modo todas las masas oscilan al unísono tal como se puede observar en la Figura 6. Este modo es irrelevante cuando el interés se concentra en efectos torsionales producidos por los restantes modos naturales de oscilación. El Modo 1 corresponde a una oscilación de la excitatriz, el generador y la parte B de la turbina de baja presión frente a la parte A de la turbina de baja presión, la turbina de presión intermedia y la turbina de alta presión. La excitatriz resulta el elemento de mayor participación. En el Modo 2 la excitatriz posee una mayor participación. El Modo 3 corresponde a una oscilación de la turbina de alta presión y el generador frente a las partes A y B de la turbina de baja presión y la excitatriz. La turbina de alta presión tiene mayor participación en este modo. El Modo 4 corresponde a una oscilación de la turbina de alta presión y la parte B de la turbina de baja presión frente a la parte A de la turbina de baja presión y el generador. La parte B de la turbina de baja presión posee mayor participación en este modo. El Modo 5 corresponde a la oscilación de la turbina de alta presión frente a la turbina de presión intermedia. La turbina de presión intermedia tiene una mayor participación en este modo. Con el programa en MATLAB del modelo completo “Turbogenerador - Línea con Compensación Serie Barra Infinita” se obtienen los siguientes resultados, donde el amortiguamiento negativo es analizado variando el factor de compensación desde 0% hasta 90% y los resultados se muestran en las Figuras 7 y 8. En la Figura 7 se observan las frecuencias de cada modo torsional y la frecuencia del modo eléctrico, se ve la perturbación que provoca en el valor de frecuencia del modo torsional al aproximarse la frecuencia del modo eléctrico a cada modo torsional. 20 15 Parte real del eigenvalor Figura 6. 10 5 0 ‐5 1 10 19 28 37 46 55 64 73 82 ‐10 ‐15 Porcentaje de compensación % Modo 5 Modo 4 Modo 3 Modo 2 Modo 1 Modo 0 Figura 8. En la Figura 8 se aprecia la relación entre el amortiguamiento que es proporcional a la parte real de cada modo frente al grado de compensación de la línea se observa que los modos se vuelven inestables cuando la frecuencia del modo eléctrico se aproxima al modo torsional. 4. Aplicación a un caso real en el SEIN (CT Ilo 2) 4.1. Descripción del caso Se ha analizado un caso real en el Sistema Eléctrico Interconectado Nacional (SEIN). En la zona sur del SEIN se encuentra la central térmica ILO 2 con una unidad turbovapor conectada en la S.E. Montalvo, que está asociada a la LT de 220 kV MantaroCotaruse-Socabaya, que ha incrementado el grado de compensación serie de 55 % a 65 % para julio 2011 [13]. Factor de Compensación serie: (21) Página 4 de 6 Usando el modelo del eje turbina-generador de la C.T. ILO 2, se obtiene las frecuencias de cada modo torsional correspondiente a la C.T. ILO 2. Los datos del modelo de masas son: COES – SINAC, Dirección de Planificación de Transmisión HP J kg m^2 4900 LP 16300 GEN 18600 EXC 160 K kN m/rad D kN m s/rad TV. Se aprecian todos los modos locales e interárea del SEIN. 143849 2.346 68443 2.454 112298 0.423 En las Figuras 12 y 14 se muestran los eigenvalores sin incluir el modelo de masas, que son todos los modos locales e interárea del SEIN. Sin embargo, en las Figuras 13 y 15, se muestran los resultados del análisis modal cuando se ha incluido el modelo de masas. Se observa que ahora aparecen los modos torsionales correspondientes a cada frecuencia mostrada en la Tabla 2. 4.2. Resultados En la Tabla 2 se muestran las frecuencias de los 4 modos torsionales obtenidos con el programa en MATLAB: Tabla 2 Modo 0 fm0 0.0 Frecuencias Modales (Hz) Modo 1 Modo 2 fm1 fm2 13.0 31.57 Modo 3 fm3 133.91 El análisis de los resultados muestra que ningún modo torsional presenta amortiguamiento negativo. Asimismo, en los casos posteriores a la repotenciación de la compensación serie no se presenta disminución en el amortiguamiento para ningún modo torsional. En la Figura 9 se muestra la actividad relativa de cada componente turbina-generador de la C.T. ILO 2 que se obtuvo con el programa. También se observa la participación de cada masa en cada modo torsional. En el Modo 1, las turbinas de alta y baja presión oscilan frente al generador y excitatriz. En el Modo 2 la turbina de alta presión oscila frente a la turbina de baja presión. En el Modo 3 oscila la excitatriz. Figura 10. Figura 11. Figura 9. Utilizando el modelo completo del SEIN en el DIgSILENT Power Factory y añadiendo el modelo de masas en el rotor de la C.T. ILO 2 TV se calcularon los eigenvalores para escenarios en máxima, media y mínima demanda de los años 2011 y 2012. La repotenciación de la compensación serie de la LT de 220 kV Mantaro-Cotaruse-Socabaya está considerada a partir de los casos de estiaje 2011. Figura 12. Primeramente se muestran las Figuras 10 y 11 que muestran los resultados cuando no está implementado el modelo de masas en la C.T. ILO 2 Página 5 de 6 COES – SINAC, Dirección de Planificación de Transmisión SEIN. Los resultados muestran que no se presentan modos con amortiguamiento negativo incluso después de haberse incrementado el grado de compensación serie de 50 % a 65 % en la L.T. Mantaro-Cotaruse-Socabaya 220 kV. 6. REFERENCIAS BIBLIOGRAFICAS [1] Figura 13. [2] [3] [4] [5] [6] Figura 14 [7] [8] Figura 15. 5. CONCLUSIONES Se ha dado inicio a las actividades de investigación del fenómeno de resonancia subsíncrona en el SEIN, mediante el análisis de un sistema elemental Generador-Línea Compensada-Barra Infinita. Con la inclusión del modelo del eje turbina-generador al modelo de la red se permite mostrar los modos subsíncronos que se presentan por la existencia de unidades térmicas de vapor y que pueden provocarse interacciones peligrosas con líneas de transmisión que tengan compensación serie capacitiva. En el análisis de un caso real en el SEIN, además de un programa desarrollado en Matlab para mostrar la explicación básica del fenómeno de Resonancia Subsíncrona, se ha utilizado el software DIgSILENT Power Factory. En el caso real mencionado que analiza el comportamiento de la central térmica ILO 2 en el Página 6 de 6 [9] [10] [11] [12] [13] IEEE “Results of subsynchronous resonance test at Mohave” IEEE Transactions on Power Apparatus and System, vol. PAS-94, no. 5, September/October 1975. IEEE Committee Report, “First benchmark model for computer simulation of subsynchronous resonance,” IEEE Transactions on Power Apparatus and Systems, vol. 96, no. 5, pp. 1565– 1572, 1977. P. M. Anderson, B. L. Agrawal, and J. E. Van Ness, Subsynchronous Resonance in Power Systems, IEEE Press, New York, 1990. K. R. Padiyar, Analysis of Subsynchronous Resonance in Power Systems, Kluwer Academic Publishers, 1999. Power System Stability and Control. Prabha Kundur, McGraw-Hill Professional Publishing. J.A. Nizovoy, J.L. Alonso, A.E. Alvarez, L.M. Bouyssede", Estudios de Resonancia Subsincrónica en Argentina “Versión ampliada en español del artículo "SSR Studies in Argentina for the Bahía Blanca Generating Plant" IPST ' 97lnternational Power System Transients Conference Seat t le, U.S.A., 23 al27 de junio de 1997. IEEE Committee Report, “First benchmark model for computer simulation of subsynchronous resonance,” IEEE Transactions on Power Apparatus and Systems, vol. 96, no. 5, pp. 1565– 1572, 1977. IEEE Committee Report, “Second Benchmark Model for Computer Simulation of Subsynchronous Resonance", IEEE Trans. on PAS, pp. 1057-1066, 1985. Estudio de Operatividad del Proyecto de Repotenciación de la LT Mantaro-CotaruseSocabaya. Estudio de Pre Operatividad del Proyecto de la LT Chilca-Marcona-Socabaya. Estudio de Pre Operatividad del Proyecto de Central Térmica de Ciclo Combinado C.C Kallpa. Estudio de Pre Operatividad del Proyecto de Central Térmica de Ciclo Combinado C.C Chilca. Estudio de Pre Operatividad del Proyecto de Central Térmica de Ciclo Combinado C.C Fénix. Comité de Operación Económica del Sistema Interconectado Nacional COES – SINAC www.coes.org.pe C. Manuel Roaud y Paz Soldán 364. San Isidro, Lima - PERÚ Teléfono: (511) 611-8585 COES – SINAC, Dirección de Planificación de Transmisión