1_Historia y descripcion
Anuncio

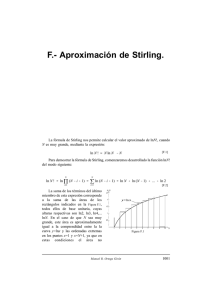
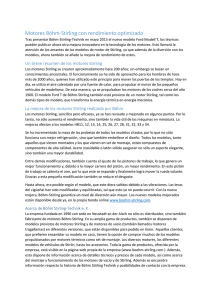
1. Historia y Descripción. Historia y Descripción. PFC de José Manuel Álvarez Prieto. 1.1. Historia y evolución. El motor de aire caliente es fruto del sentido común, como no podía ser de otra manera en una época en la que la ciencia termodinámica estaba todavía en sus comienzos y las personas reconocidas como ingenieros estaban acreditadas más por sus inventos y desarrollos que por diplomas obtenidos en las incipientes escuelas de ingeniería que aparecían aquí y allá en toda Europa. En 1807 el inglés Sir George Cayley escribió un artículo donde se describía por primera vez, acompañado de un esquema, el funcionamiento de un motor de aire caliente. “El aire aumenta de volumen al calentarse y se reduce al enfriarse y estas propiedades debieran poderse aprovechar para obtener energía cinética”. En 1816, el clérigo escocés Robert Stirling (1790-1879) comenzó a trabajar con su hermano James en un motor que llevara a la práctica estas ideas y lo patentó en 1827. Los dos primeros principios de la termodinámica fueron publicados en Francia por Nicolas Léonard Sadi Carnot en 1824 en su obra titulada “Reflexiones sobre la potencia motriz del fuego y sobre las máquinas adecuadas para desarrollar esta potencia”. El primer motor de los hermanos Stirling constaba de dos cilindros. En uno de ellos el aire se calentaba y se enfriaba alternativamente. Cuando el aire se expandía, actuaba sobre el otro cilindro. Los Stirling construyeron varios motores, pero nunca llegaron a producirlos en masa. El más grande de ellos tenía una potencia de 21 caballos; su cilindro principal tenía un diámetro de 40 cm y el recorrido del émbolo era de 120 cm. Figura 1.1. Robert Stirling (1790 – 1879) El motor Stirling fue superado progresivamente por otros tipos de motores hasta el punto de desaparecer prácticamente de escena hacia 1930. Por muchos años el ciclo Stirling tuvo sólo un interés teórico. El siguiente desarrollo importante fue el de la casa holandesa Philips. Esta empresa estaba buscando una fuente de energía que hiciera funcionar un pequeño generador con el que proveer de electricidad a las radios de válvulas que fabricaba y que pretendía vender en países con escasa implantación de la red eléctrica. La idea era prometedora pero la aparición del transistor, en los años cincuenta, dio al traste con esta aspiración. Se decidió entonces buscar otras aplicaciones como la de propulsar vehículos militares o pequeñas embarcaciones de 3 Historia y Descripción. PFC de José Manuel Álvarez Prieto. recreo. Durante los años sesenta y setenta se llegó al empleo del motor Stirling en vehículos, especialmente camiones y autobuses, donde el mayor peso de estos motores con respecto a los de combustión interna era menos crítico. No obstante también se investigó su implantación en automóviles civiles. El Opel Kadett híbrido Stirling – Eléctrico experimental de 1969 de la siguiente imagen es un ejemplo: Figura 1.2. Opel Kadett híbrido Stirling – Eléctrico experimental de 1969. También Ford instaló en 1976 un motor Stirling experimental de 170 CV en su modelo Torino. El motor de 4 cilindros tenía un desplazamiento de 860 cm3 y funcionaba con hidrógeno como fluido de trabajo. La máxima presión de operación en el ciclo era de unos 18 MPa y la temperatura del foco caliente era de aproximadamente 760ºC. Posteriormente el DOE (Department of Energy) y la NASA iniciaron juntas a partir de 1978 un programa impulsado por el gobierno norteamericano para la creación de un motor Stirling de aplicación en automoción. Inicialmente el interés se centró en desarrollar la tecnología para sustituir ventajosamente al motor de combustión interna en los automóviles y para ello debía superarlo con un menor consumo de combustible, menores emisiones de contaminantes a la atmósfera, tener unas prestaciones similares o superiores a los motores convencionales (mismo orden de tiempo necesario para acelerar, potencia, etc) y debían poderse producir en masa a costes razonables. Fueron creadas varias generaciones de motores durante las décadas de los 80 y 90 del siglo pasado. Las dos primeras se representan en la siguiente figura: Figura 1.3. Las dos primeras generaciones de motores experimentales de la NASA y DOE. 4 Historia y Descripción. PFC de José Manuel Álvarez Prieto. Dichos motores fueron instalados en vehículos convencionales de la época pues debían servir para animar a los fabricantes de automóviles a considerar seriamente la incorporación de dicha tecnología en sus productos. En una fase posterior se montaron motores de este tipo en vehículos de la administración norteamericana con el fin de obtener datos de explotación diaria. Figura 1.4. Automóviles propulsados por motores Stirling en fase experimental. 5 Historia y Descripción. PFC de José Manuel Álvarez Prieto. Los flujos de calor en los motores Stirling se realizan a través de intercambiadores, por lo que no tienen una relación peso a potencia muy favorable (salvo, quizá, para camiones y autobuses o aplicaciones estacionarias como generadores y bombas). Los pistones no se lubrican para evitar la obstrucción en el regenerador, lo cual (ligado a las altas presiones y temperaturas del ciclo) obligan a buscar en el diseño un compromiso razonable entre la fricción y las holguras dimensionales entre el pistón y cilindro. Por otra parte los motores Stirling pueden operar con casi cualquier fuente de calor, desde la solar (sin emisiones a la atmósfera) a cualquier tipo de combustible. En este último caso todavía serían considerados como motores de combustión externa y tienen notables ventajas respecto a los motores de combustión interna como los de uso común en automoción. Al ser la llama exterior y a presión atmosférica es más fácil regularla adecuadamente para que el proceso de combustión sea mucho más completo y emita la menor cantidad posible de monóxido de carbono, hidrocarburos y óxido de nitrógeno. Los motores Stirling son además silenciosos, fiables y de larga vida. En ellos no se producen explosiones internas, con grandes gradientes de presión y temperatura en un instante corto del ciclo que alteren la lubricación y refrigeración. Se pueden equilibrar dinámicamente de forma muy sencilla, de manera que se reduzcan las vibraciones en funcionamiento. Actualmente hay un renovado interés por los motores Stirling para generación de electricidad a partir de la energía solar térmica. Un ejemplo lo encontramos en los generadores que fabrica y comercializa la compañía alemana SOLO. En estos se hace coincidir el foco caliente del motor con el foco geométrico de un paraboloide de espejos de grandes dimensiones que debe ser orientado convenientemente respecto al sol. Figura 1.5. Ejemplo de aplicación solar para un motor Stirling. 6 Historia y Descripción. PFC de José Manuel Álvarez Prieto. 1.2. Ciclo termodinámico. El ciclo teórico de Stirling está comprendido por dos isócoras y dos isotermas, representándose en el diagrama p-V de la siguiente forma: Figura 1.6. Diagrama p-V teórico. El motor recorre el ciclo en sentido horario de manera que la expansión (isoterma “3-4”) se hace a mayor temperatura que la compresión (isoterma “1-2”), cediendo un trabajo neto. Su representación en el diagrama T-s es esta otra: Figura 1.7. Diagrama T-s teórico. En ella se puede apreciar que el gas intercambia calor con el medio tanto en las isotermas como en las isócoras. Se observa también que el calor intercambiado en las partes del ciclo en las que el volumen es constante, es igual y de sentido contrario (en la isócora “2-3” el gas absorbe calor y en la isócora “4-1” lo cede). El motor Stirling cuenta con un dispositivo capaz de captar el calor cedido por el gas en la fase “4-1” para devolverlo más tarde al ciclo en la fase “2-3”, evitando de esta manera que sea la fuente de calor la que provea de energía en este periodo “2-3”. El dispositivo se llama regenerador, y si dispusiera de un rendimiento del 100% lograríamos que el ciclo de Stirling tuviera un rendimiento igual al de Carnot. En efecto, el calor absorbido neto sería el de la isoterma “3-4” y el calor cedido neto sería el de la isoterma “1-2”, dando lugar a la siguiente expresión del rendimiento térmico η Stirling = Qabsorbido − Qcedido Q T = 1 − cedido = 1 − c = η Carnot Qabsorbido Qabsorbido Tf Siendo Tc la temperatura en el foco caliente y Tf la del foco frío. 7 Historia y Descripción. PFC de José Manuel Álvarez Prieto. 1.3. Tipos de motores. Hay básicamente 3 tipos diferentes de motores Stirling. Sus diferencias son meramente constructivas y se denominan motor alfa, motor beta y motor gamma. Figura 1.8. Esquema típico de los motores tipo alfa, beta y gamma. El motor alfa tiene dos pistones de potencia. Se construye habitualmente con dos cilindros a 90º, uno para cada pistón. Uno de ellos es el cilindro caliente y el otro el cilindro frío de la máquina. Están interconectados a través de un regenerador que comunica las dos cámaras. Cada pistón necesita su sello para asegurar la estanqueidad y esto supone una desventaja respecto a los otros tipos beta y gamma que sólo tienen un pistón de potencia. El tipo beta tiene un solo pistón de potencia y un pistón desplazador. La misión de éste último es desplazar el fluido para que atraviese sucesivamente, y de forma síncrona con el movimiento del pistón de potencia, los intercambiadores y el regenerador para completar el ciclo termodinámico. El tipo gamma es casi idéntico al beta. Tan solo se diferencia de éste en que el pistón de potencia y el desplazador operan en cilindros distintos, lo cual significa una simplificación constructiva al no tener que atravesar el vástago del desplazador al pistón de potencia. Por esta razón es el favorito de los aficionados que lo consideran más versátil para hacer modelos miniatura. Sin embargo el volumen necesario para conectar los dos cilindros es un espacio indeseable que se añade al volumen muerto total y que conviene minimizar. A continuación describiremos el funcionamiento del motor alfa, por ser éste el tipo de motor que hemos elegido para el estudio. 8 Historia y Descripción. PFC de José Manuel Álvarez Prieto. 1.4. Funcionamiento del motor alfa. En un motor tipo α como el de las siguientes figuras el gas de trabajo recorre un ciclo como el que se describe a continuación: Figura 1.9. Punto 1. Pseudo-final de la compresión a baja temperatura. Figura 1.10. Punto 2. Pseudo-inicio de la expansión a alta temperatura. Figura 1.11. Punto 3. Pseudo-final de la expansión a alta temperatura. Figura 1.12. Punto 4. Pseudo-inicio de la compresión a baja temperatura. Diagrama p-V 2.8 Punto 2. Presión en bares 2.6 2.4 2.2 2 Punto 1. Punto 3. 1.8 Punto 4. 1.6 1.4 140 150 160 170 180 190 200 3 210 220 230 Volumen en cm Figura 1.13. Diagrama p-V de un motor real en el que se han señalado los puntos 1 a 4. Al ser un motor real, las distintas fases del ciclo se solapan ligeramente (el movimiento del cigüeñal y la conexión cinemática de éste con los pistones hacen que esto sea así). Por tanto la representación más parecida del ciclo en el diagrama p-V es el de la figura 9 Historia y Descripción. PFC de José Manuel Álvarez Prieto. 1.13 y no el del ciclo teórico encerrado entre isócoras e isotermas que teníamos por ejemplo en la figura 1.6. En la figura 1.9 el émbolo de la izquierda está en su punto muerto superior PMS y por tanto inmóvil mientras que el pistón de la derecha tiene en ese momento un movimiento ascendente a una velocidad lineal cercana a la máxima. Se está produciendo por tanto en el ciclo una compresión del gas. En la figura 1.10 el pistón de la izquierda está descendiendo y el de la derecha está en su respectivo PMS. El gas ha pasado de la cámara de compresión a la cámara de expansión pasando por el regenerador y recogiendo de éste una cantidad de calor. En la figura 1.11 el pistón de la izquierda está en su punto muerto inferior PMI mientras que el de la derecha está moviéndose hacia abajo. El gas ha terminado una expansión que se ha realizado mayoritariamente en la zona de alta temperatura, dando por tanto el motor un trabajo positivo. En la figura 1.12 se representa al motor con el pistón derecho en su respectivo PMI mientras que el izquierdo está en su carrera ascendente. El gas se ha desplazado de la zona caliente a la fría pasando por el regenerador y cediéndole a éste parte de su calor. A continuación (figura 1.14) se representa la secuencia de actuación de un esquemático motor Stirling del tipo alfa que consta de un solo cilindro en cuyos extremos se encuentran las cámaras de compresión (celeste), el foco frío (azul), el regenerador (verde), el foco caliente (rojo) y la cámara de expansión (magenta). Se puede observar en ella que, al ser el motor simétrico (misma sección en ambos pistones y mismo radio de manivela en ambos cigüeñales) el volumen mínimo se dará para un ángulo de 45º sobre la posición de referencia. Análogamente el volumen máximo se dará para un ángulo de 225º sobre dicha posición de referencia. Esto solo ocurrirá si se da esta simetría y el desfase entre ambos conjuntos cinemáticos es de 90º. En la figura 1.14 “θ” representa el ángulo que forma el cigüeñal con su respectivo origen de referencia. 10 Historia y Descripción. PFC de José Manuel Álvarez Prieto. θ = 0º θ θ θ = 45º (Mínimo Volumen) θ = 90º θ = 135º θ = 180º θ = 225º (Máximo Volumen) θ = 270º θ = 315º θ = 360º Figura 1.14. Secuencia de funcionamiento de un motor tipo alfa de un solo cilindro. 11 Historia y Descripción. PFC de José Manuel Álvarez Prieto. 1.5. Motores de Laboratorio. Existen unos motores Stirling en el mercado que sólo tienen propósito didáctico científico para el estudio del ciclo termodinámico que tiene lugar. Dichos motores suelen ser estar hechos con cristal resistente a altas temperaturas para que pueda verse el movimiento de sus partes y trabajan con aire. Dos de los modelos más difundidos son el motor de la casa Phywe y el Leybold. En las siguientes imágenes encontramos el equipo completo para laboratorio de la PHYWE, la secuencia de operación del motor y el diagrama pV teórico correspondientes. Este motor es del tipo gamma, la fuente de calor en el foco caliente es la llama de un mechero de alcohol y el foco frío está refrigerado por aire. Figura 1.15. Motor tipo gamma para prácticas de laboratorio. Figura 1.16. Secuencia de operación para el motor tipo gamma y el ciclo pV teórico asociado. 12 Historia y Descripción. PFC de José Manuel Álvarez Prieto. Por el contrario el motor de la casa Leybold es del tipo beta, la fuente de calor en el foco caliente es la disipación térmica de una resistencia eléctrica, y el foco frío está refrigerado por agua. En la figura siguiente vemos un dibujo del montaje de accesorios del motor Leybold para la determinación del rendimiento. Figura 1.17. Motor tipo beta de Leybold con accesorios. En concreto se mide la tensión e intensidad que circula por la resistencia eléctrica del foco caliente para la determinación de la potencia calorífica de entrada. Por otra parte mide el caudal y la temperatura del refrigerante que circula por el foco frío para obtener la potencia calorífica de salida. Además mide el par efectivo de salida mediante un freno y la velocidad angular del cigüeñal con un cuentarrevoluciones para obtener la potencia mecánica de salida. La secuencia de operaciones que realiza para completar un ciclo, y el diagrama pV teórico correspondiente son: Figura 1.18. Secuencia de operación para el motor tipo beta y el ciclo pV teórico asociado. 13