P 5 - Universidad de Buenos Aires
Anuncio

FACULTAD DE CIENCIAS EXACTAS Y NATURALES
UNIVERSIDAD DE BUENOS AIRES
C Á
Mı́ Eı́ Ḿ
S C 2007
Ṕ 5
1. Hallar la ecuación del plano que pasa por el punto (3, 1, −2) y satisface la condición dada
a) paralelo al plano xy
b) perpendicular al eje y
2. Hallar la ecuación de la esfera que satisface las condiciones dadas
a) centro en (0, 2, −1) y radio 3
b) centro en (2, 4, −4) y pasa por el origen
c) el segmento de recta que une (0, 4, 2) y (6, 0, 2) es un diámetro.
3. Demostrar que la ecuación dada es la ecuación de una esfera y hallar su centro y radio
a) x2 + y2 + z2 + 4x − 8y − 2z + 5 = 0
b) 3x2 + 3y2 + 3z2 − 12x − 6z + 3 = 0
4. a) ¿Representa una esfera la ecuación
x2 + y2 + z2 − 4x + 4y + 6z + 20 = 0?
En caso afirmativo, hallar su centro y su radio. En caso negativo, explicar por qué no lo
es.
b) Imponer condiciones sobre A , B , C y D para que la ecuación
x2 + y2 + z2 + Ax + By + Cz + D = 0
represente una esfera.
−−→
5. a) Sean P y Q dos puntos del espacio y sea R el punto de PQ cuya distancia a Q es el doble
de su distancia a P.
−−→
−−→
−−→
Sean p = OP , q = OQ y r = OR. Demostrar que r = 23 p + 31 q.
b) Suponiendo que d(P, Q) = 1, ¿a qué distancia de los extremos del segmento [P, Q] está el
punto R = P + t0 (Q − P)? ¿Vale lo mismo si d(P, Q) , 1?
c) Dados P = (3, 0, −2) y Q = (1, −2, −1), hallar el punto del segmento [P, Q] que está a
distancia 35 de Q.
2
FCEYN — UBA — COMPLEMENTOS DE ANALISIS — SEGUNDO CUATRIMESTRE 2007
6. Sean a = i − j + 2k , b = 2i − j + 2k , c = 3i − 3j + 6k y d = −2i + 2j − 4k.
a) ¿qué vectores son paralelos?
b) ¿qué vectores tienen el mismo sentido?
c) ¿qué vectores tienen sentidos opuestos?
7. Hallar el vector unitario en la dirección y el sentido del vector a
a) a = (3, −4)
b) a = i − 2j + k
8. Hallar todos los vectores v = ai + bj que poseen las propiedades indicadas
a) forma un ángulo de 30o con el eje x en sentido contrario al de las agujas del reloj y tiene
norma 2
b) forma un ángulo de − 5π
radianes con la parte positiva del eje x y tiene norma 5.
6
9. Dados
a = 2i + j
,
b = 3i − j + 2k
,
c = 4i + 3k
calcular
a) los tres productos escalares: a · b , a · c , b · c
b) los cosenos de los ángulos formados por esos vectores
10. a) Suponiendo que a · b = c · b para todo b concluir que debe ser a = c
b) ¿Vale lo mismo para el producto vectorial?
11. a) Demostrar que
4(a · b) = ka + bk2 − ka − bk2
b) Usar a) para comprobar que
a⊥b
⇐⇒
ka + bk = ka − bk
c) Demostrar que si a y b son vectores no nulos tales que
(a + b) ⊥ (a − b)
y
ka + bk = ka − bk
entonces el paralelogramo asociado a a y b es un cuadrado.
12. ¿En qué condiciones se verifica que |a · b| = kak kbk?
13. Sea r = f (θ) la ecuación polar de una curva del plano y sean
ur = cos θi + sen θj
uθ = − sen θi + cos θj
a) Demostrar que ur y uθ son vectores unitarios perpendiculares
3
FCEYN — UBA — COMPLEMENTOS DE ANALISIS — SEGUNDO CUATRIMESTRE 2007
b) Sea P = (r, θ) un punto de la curva. Demostrar que ur tiene la misma dirección y sentido
−−→
que el vector OP y que la dirección de uθ forma un ángulo de 90o con ur , medido en
sentido contrario a las agujas del reloj.
14. Hallar un vector n que sea perpendicular al plano generado por los puntos P, Q y R y hallar
el área de triángulo PQR
a) P = (0, 1, 0) , Q = (−1, 1, 2) , R = (2, 1, −1)
b) P = (1, 2, 3) , Q = (−1, 3, 2) , R = (3, −1, 2)
15. Hallar el volumen del paralelepı́pedo determinado por los vectores
a) i + j , 2i − k , 3j + k
b) i − 3j + k , 2j − k , i + j − 2k
16. ¿Cuáles de los puntos P = (1, 2, 0) , Q = (−5, 1, 5) , R = (−4, 2, 5) están en la recta
` : r(t) = i + 2j + t(6i + j − 5k)?
17. Hallar una parametrización vectorial de la recta que satisface las condiciones dadas
a) pasa por P = (3, 1, 0) y es paralela a la recta r(t) = i − j + tk
b) pasa por el origen y por Q = (x0 , y0 , z0 )
c) pasa por P = (x0 , y0 , z0 ) y por Q = (x1 , y1 , z1 )
18. a) Hallar una parametrización vectorial del segmento de recta que empieza en (2, 7, −1) y
termina en (4, 2, 3)
b) Determinar los valores de t para los cuales las ecuaciones
x(t) = 7 − 5t
,
y(t) = −3 + 2t
,
z(t) = 4 − t
parametrizan el segmento de recta que empieza en (12, −5, 5) y termina en (−3, 1, 2)
19. Hallar los vectores normales unitarios de los siguientes planos
a) 2x − 3y + 7z − 3 = 0
b) 2x − y + 5z − 10 = 0
4
FCEYN — UBA — COMPLEMENTOS DE ANALISIS — SEGUNDO CUATRIMESTRE 2007
20. Determinar si los vectores dados son coplanares
a) 4j − k , 3i + j + 2k , 0
b) i , i − 2j , 3j + k
21. Dibujar la gráfica de los planos siguientes
a) x + 2y + 3z − 6 = 0
b) 5x + 4y + 10z = 20
22. Graficar los siguientes puntos (r, θ) dados en coordenadas polares y hallar sus coordenadas
cartesianas.
(2, 0) ,
(2, π)
(4, π4 )
,
(3, 3π
)
2
,
,
(3,
5π
)
6
,
(5, 3π
)
2
23. Hallar la representación en coordenadas polares de los siguientes puntos dados en coordenadas cartesianas
(2, −2) ,
(−1, 1)
,
(0, 3)
,
(0, −4)
,
√
( 3, −1) ,
(3, 4)
24. Esbozar la gráfica de la ecuación polar y hallar la ecuación rectangular correspondiente
a) r = 4
b) θ =
π
6
c) r = cos θ
d) r = 3 sen θ
25. Esbozar la gráfica de las siguientes curvas dadas en coordenadas polares
a) r = cos(2θ)
b) r = 3 + 2 sen θ
c) r = 14 θ
d) r = 2 cos(θ − π4 )
e) r = cos θ + sen θ
26. Hallar la ecuación polar que corresponde a la ecuación cartesiana dada
a) y2 − x2 = 4
b) x2 + y2 = 9
c) x2 + y2 = x
d) y = 3
e) x = 2
5
FCEYN — UBA — COMPLEMENTOS DE ANALISIS — SEGUNDO CUATRIMESTRE 2007
27. a) Los siguientes puntos vienen dados en coordenadas cilı́ndricas; expresar cada uno en
coordenadas rectangulares y esféricas
(1, 45o , 1)
,
(2, π2 , −4)
,
(2, π6 , 2)
,
(1, π6 , 0)
,
(2, 3π
, −2)
4
b) Expresar en coordenadas cilı́ndricas y esféricas los siguientes puntos (dados en coordenadas cartesianas)
√
√
√
√
√
√
(0, 5 2 2 , 5 2 2 ) , (− 46 , 42 , − 22 ) , (−7, 0, 0) , ( 2, 1, 1)
28. Describir el significado geométrico de las siguientes aplicaciones en coordenadas cilı́ndricas
a) (r, θ, z) −→ (r, θ, −z)
b) (r, θ, z) −→ (r, θ + π, −z)
c) (r, θ, z) −→ (r, θ − π4 , z)
29. Describir el significado geométrico de las siguientes aplicaciones en coordenadas esféricas
a) (r, θ, ϕ) −→ (r, θ + π, ϕ)
b) (r, θ, φ) −→ (r, θ, π − ϕ)
c) (r, θ, ϕ) −→ (2r, θ + π2 , ϕ)
30. a) Describir las superficies dadas en coordenadas cilı́ndricas
r = constante
,
θ = constante
,
z = constante
,
ϕ = constante
b) Describir las superficies dadas en coordenadas esféricas
r = constante
,
θ = constante
31. a) Graficar la curvas dadas en coordenadas esféricas
π
4
2 , ϕ = π3
π
, ϕ = π4
3
(i) r = 2 , θ =
(ii) r =
(iii) θ =
b) Graficar las curvas dadas en coordenadas cilı́ndricas
(i) r = 2 , θ =
π
2
(ii) r = 2 , z = 3
(iii) θ =
π
4
,z=1
32. Hallar las ecuaciones paramétricas de las siguientes curvas indicando el rango del parámetro
a) x2 + y2 = r2
b) 4x2 +
y2
=1
9
6
FCEYN — UBA — COMPLEMENTOS DE ANALISIS — SEGUNDO CUATRIMESTRE 2007
c) x2 − y2 = 1
1
d) x2 − 3y2 =
3
x − 2y + z = 1
e)
x + z = 0
f) el gráfico de la función f : [0, π] −→ R , f (t) = esen t
g) el gráfico de la función g : R −→ R , g(x) = x2 + 1
h) los lados del cuadrado de vértices (−1, −1) , (1, −1) , (1, 1) y (−1, 1).
33. Hallar las ecuaciones paramétricas de las siguientes superficies de R3 indicando el rango de
cada parámetro
a) x2 + y2 = 1
b) x2 + y2 + z2 = 9
c) 2x − y + z = 3
d) x2 − 2y + 2x + 1 = 0
e) x2 + y2 + 6x − 2y = 0
f) 2x2 + 2y2 + 4x − 6y − z = 0
g) x2 + y2 = z2
h) x2 − y2 = 1
7
FCEYN — UBA — COMPLEMENTOS DE ANALISIS — SEGUNDO CUATRIMESTRE 2007
Á: D R
Base de un espacio vectorial
Si V es un espacio vectorial real de dimensión n, se dice que el conjunto B = {v1 , . . . , vn } ⊂ V
es una base de V si
todo v ∈ V se puede escribir en la forma:
v = a1 v1 + · · · + an vn
la n−upla (a1 , . . . , an ) ∈ Rn representa las coordenadas del vector v en la base B.
si (a1 , . . . , an ) y (b1 , . . . , bn ) son las coordenadas de un mismo vector v en la base B,
entonces ai = bi para todo i = 1, . . . , n.
Base canónica de Rn
{(1, 0, . . . , 0) , (0, 1, 0, . . . , 0) , . . . , (0, . . . , 0, 1)}
En el caso de R3 , denotaremos
i = (1, 0, 0)
,
j = (0, 1, 0) ,
k = (0, 0, 1)
Norma de un vector
Dado v ∈ Rn , con coordenadas (v1 , . . . , vn ) en la base canónica, llamamos norma de v al
número
q
kvk = v21 + · · · + v2n
Propiedades
. ku + vk 6 kuk + kvk
. ka.uk = |a| kuk
(a ∈ R)
. |ui | 6 kuk 6 |u1 | + · · · + |un |
para todo i = 1, . . . , n
. kuk − kvk 6 | kuk − kvk | 6 ku − vk
Producto escalar
Dados u = (u1 , u2 , u3 ) , v = (v1 , v2 , v3 ) en R3 , se define el producto escalar entre u y v como
el número
u · v = u1 v1 + u2 v2 + u3 v3
8
FCEYN — UBA — COMPLEMENTOS DE ANALISIS — SEGUNDO CUATRIMESTRE 2007
Propiedades
. u · v = kuk kvk cos α
. |u · v| 6 kuk kvk
(α = ángulo entre u y v)
Desigualdad de Schwarz
. u · v = 0 si y sólo si u y v son ortogonales
. u · u = kuk2
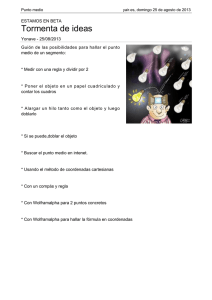
Proyección ortogonal
Sea b un vector no nulo. La proyección ortogonal del vector a sobre b es el vector
proyb a =
el número
a·b
kbk2
b
a·b
se llama componente de a en la dirección de b.
kbk2
a
b
proyb a
Rectas y planos en el espacio
Sean P = (x0 , y0 , z0 ) , Q = (x1 , y1 , z1 ) puntos de R3 . La recta L que pasa por P y Q se puede
expresar en la forma
L : (x, y, z) = P + t(Q − P)
(t ∈ R)
El vector v —de origen 0 y extremo Q − P = (x1 − x0 , y1 − y0 , z1 − z0 )— es la traslación al origen
−−→
del vector PQ y da la dirección de la recta.
L'
L
Q-P
v
Q
u
P
R-P
R
PR
u = tv
R=P+t(Q-P)
PQ
9
FCEYN — UBA — COMPLEMENTOS DE ANALISIS — SEGUNDO CUATRIMESTRE 2007
Sean P = (x0 , y0 , z0 ) , Q = (x1 , y1 , z1 ) y R = (x2 , y2 , z2 ) tres puntos de R3 no colineales. El
plano π que pasa por P , Q y R puede expresarse en la forma
π : (x, y, z) = P + s(Q − P) + t(R − P)
(s, t ∈ R)
Si u , 0 es un vector ortogonal a los vectores Q − P y R − P, el plano π puede representarse
también mediante la ecuación
π : u · (x − x0 , y − y0 , z − z0 ) = 0
Segmento que une dos puntos del espacio
Dados los puntos P = (x0 , y0 , z0 ) y Q = (x1 , y1 , z1 ), el segmento con origen P y extremo Q
es el conjunto
[P, Q] = {R ∈ L / d(P, R), d(Q, R) 6 d(P, Q)}
donde L es la recta que une ambos puntos.
L
Q
t ≥ 1
P
0 ≤ t ≤ 1
t ≤ 0
R=P+t(Q-P)
Es decir, son los puntos de L que están entre P y Q.
Consideremos el caso interesante: P , Q 1 . Dado cualquier R ∈ [P, Q], como en particular
R ∈ L, existe t ∈ R tal que
R = P + t(Q − P)
Vamos a tratar de encontrar una condición sobre el parámetro t que nos permita identificar a
los puntos de la recta L que están en [P, Q]. Para ello consideremos las distancias de R a los
extremos
d(P, R) = kR − Pk = kt(Q − P)k
=| t | kQ − Pk
d(Q, R) = kP + t(Q − P) − Qk = k(t − 1)(Q − P)k
=| t − 1 | kQ − Pk
1
si P = Q, el segmento se reduce a un punto
10
FCEYN — UBA — COMPLEMENTOS DE ANALISIS — SEGUNDO CUATRIMESTRE 2007
La condición necesaria y suficiente para que los puntos de L estén entre P y Q es que estas dos
distancias sean menores o iguales que d(P, Q) = kQ − Pk. Resulta entonces que los valores de t
deben satisfacer
| t | kQ − Pk 6 kQ − Pk
y
| t − 1 | kQ − Pk 6 kQ − Pk
lo que, simplificando el número positivo kQ − Pk, equivale a que
| t |6 1
y
| t − 1 |6 1
−1 6 t 6 1
y
−16t−161
es decir,
que es lo mismo que decir
−1 6 t 6 1
y
06t62
de modo que para que R esté en el segmento es necesario y suficiente que satisfaga
R = P + t(Q − P)
con
06t61
Finalmente, podemos afirmar entonces que
[P, Q] = {(1 − t)P + tQ / 0 6 t 6 1} = {P + t(Q − P) / 0 6 t 6 1}
El punto medio de este segmento es el que verifica
M = P + t(Q − P) (0 6 t 6 1)
y
d(P, M) = d(Q, M)
luego,
td(P, Q) = (1 − t)d(P, Q)
por ser P , Q resulta d(P, Q) > 0 y entonces la igualdad anterior implica
t =1−t
es decir,
t=
1
2
y en consecuencia
M=
1
1
P+ Q
2
2
11
FCEYN — UBA — COMPLEMENTOS DE ANALISIS — SEGUNDO CUATRIMESTRE 2007
Paralelogramo determinado por dos vectores independientes
Sean u y v dos vectores linealmente independientes. Consideremos el paralelogramo P que
los tiene por dos de sus lados y sea R uno de sus puntos
R
Q
v
Q1
u
w
v1
u1
P
P1
O
Es claro que w satisface: w = u1 + v1 y también que los extremos P1 de u1 y Q1 de v1 están,
respectivamente, sobre los segmentos [O, P] y [O, Q]. Por lo visto antes podemos afirmar que
existen 0 6 t, s 6 1 tales que
P1 = O + t(P − O)
,
Q1 = O + s(Q − O)
lo que, dicho en términos de vectores se escribe
w = tu + sv
o bien, recordando que w —como vector con origen 0— tiene extremo R − O,
R − O = tu + sv
Deducimos de aquı́ que el paralelogramo P se puede expresar en la forma
P = {O + tu + sv / 0 6 t, s 6 1}
Orientación de bases
Consideremos la base canónica {i, j, k} y la base {j, i, k}
12
FCEYN — UBA — COMPLEMENTOS DE ANALISIS — SEGUNDO CUATRIMESTRE 2007
k
k
j
j
i
i
-k
{j , i , k}
{i , j , k}
si ubicamos la mano derecha
si ubicamos la mano derecha
de modo que el índice se curve
de modo que el índice se curve
de i a j , el pulgar apuntará
hacia arriba; es decir, en la
de j a i , el pulgar apuntará
hacia abajo; es decir, en la
misma dirección que k
misma dirección que -k
Al procedimiento descripto en el gráfico anterior se lo suele denominar regla de la mano
derecha. Cabe hacer notar que esto mismo se puede realizar con cualquier base de R3 . Si
{u, v, w} es otra base de R3 , decimos que tiene la misma orientación que la base canónica
cuando aplicándole la regla de la mano derecha resulta que, al curvar el ı́ndice de u a v, el
pulgar apunta hacia el mismo lado que w. Si por el contrario apunta hacia el lado contrario,
decimos que tiene la orientación opuesta.
Producto vectorial
Dados a = (a1 , a2 , a3 ) y b = (b1 , b2 , b3 ), el producto vectorial entre ellos es el vector
a a a a a a a × b = b22 b33 i − b11 b33 j + b11 b22 k
Este vector puede representarse en la forma
i j k
a × b = det a1 a2 a3
b1 b2 b3
donde “det” indica un determinante formal dado que i , j , k no son números.
Propiedades
. a × b = −b × a
. a×b=0
si y sólo si
. a×b⊥a
,
a y b son paralelos
a×b⊥b
. ka × bk = kak kbk sen α
(α = ángulo entre a y b)
. ka × bk = área del paralelogramo de lados a y b
13
FCEYN — UBA — COMPLEMENTOS DE ANALISIS — SEGUNDO CUATRIMESTRE 2007
. Dados a y b independientes, {a, b, a × b} es una base de R3 que tiene la misma orientación
que la base canónica.
a× b
b
a
Producto mixto
Dados los vectores a = (a1 , a2 , a3 ) , b = (b1 , b2 , b3 ) y c = (c1 , c2 , c3 ), el producto mixto entre
estos vectores es el número
a1 a2 a3 (abc) = (a × b) · c = b1 b2 b3 c1 c2 c3 Propiedades
. (abc) = (cab) = (bca)
. Si a , b y c no son coplanares, entonces
|(abc)| = volumen del paralelogramo determinado por a, b, c
. (abc) = 0
⇐⇒
a, b, c son coplanares
. a × (b × c) = (a · c) b − (a · b) c
14
FCEYN — UBA — COMPLEMENTOS DE ANALISIS — SEGUNDO CUATRIMESTRE 2007
Cónicas
1. D :
2. D :
(x − α)2 (y − β)2
−
=0
a2
b2
(x − α)2
=1
a2
3. R : (x − α)2 = 0
4. C :
5. H́ :
(x − α)2 (y − β)2
+
=1
a2
b2
(x − α)2 (y − β)2
−
=1
a2
b2
FCEYN — UBA — COMPLEMENTOS DE ANALISIS — SEGUNDO CUATRIMESTRE 2007
6. Ṕ :
(x − α)2
− (y − β) = 0
a2
Cuádricas
1. E :
(x − α)2 (y − β)2 (z − γ)2
+
+
=1
a2
b2
c2
2. H :
3. C :
(x − α)2 (y − β)2 (z − γ)2
+
−
=1
a2
b2
c2
(x − α)2 (y − β)2 (z − γ)2
+
−
=0
a2
b2
c2
15
16
FCEYN — UBA — COMPLEMENTOS DE ANALISIS — SEGUNDO CUATRIMESTRE 2007
4. H :
5. C ı́ :
(x − α)2 (y − β)2 (z − γ)2
−
−
=1
a2
b2
c2
(x − α)2 (y − β)2
+
=1
a2
b2
6. C ́ :
(x − α)2 (y − β)2
−
=1
a2
b2
7. D :
8. D :
(x − α)2 (y − β)2
−
=0
a2
b2
(x − α)2
=1
a2
17
FCEYN — UBA — COMPLEMENTOS DE ANALISIS — SEGUNDO CUATRIMESTRE 2007
9. P :
(x − α)2 = 0
10. P ı́ :
(x − α)2 (y − β)2
+
− (z − γ) = 0
a2
b2
11. P ́ :
12. C ́ :
(x − α)2 (y − β)2
−
− (z − γ) = 0
a2
b2
(x − α)2
− (z − γ) = 0
a2
Coordenadas polares
Las coordenadas polares (r, θ) de un punto (x, y) , (0, 0) están definidas por
x = r cos θ
,
y = r sen θ
18
FCEYN — UBA — COMPLEMENTOS DE ANALISIS — SEGUNDO CUATRIMESTRE 2007
donde
r>0
y
0 6 θ < 2π
(x,y)
y
r
θ
x
Graficar usando coordenadas polares
Cuando debemos representar gráficamente una curva dada en coordenadas cartesianas utilizamos el siguiente sistema de ejes
x=-2
y=2
y=1
x=2
(xo ,yo )
yo
xo
y=-1
x=1
x=3
que nos permite ubicar rápidamente un punto de coordenadas cartesianas (x0 , y0 ). Si, en cambio, la ecuación de la curva viene dada en forma polar, ubicar en aquel sistema el punto de
coordenadas (r0 , θ0 ) ya no es tan inmediato.
Conviene en tal caso utilizar este otro sistema
19
FCEYN — UBA — COMPLEMENTOS DE ANALISIS — SEGUNDO CUATRIMESTRE 2007
θ = π/2
θ = π/4
θ = 3π/4
(ro , θo)
θ = π/6
θ=π
θ=0
r=1
r=1/2
r=3/2
θ = 5π/4
θ = 3π/2
donde las semirrectas representan a los distintos valores de los ángulos y las circunferencias a
los de los radios.
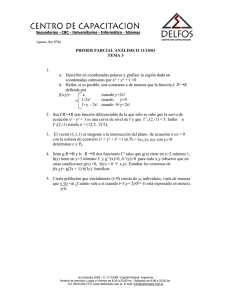
Ejemplo
Grafiquemos la curva dada por la ecuación en coordenadas polares
(0 6 θ 6 π2 )
r = cos θ
Comencemos ubicando en el sistema antes definido algunos puntos de esta curva
(1, 0)
,
(
√
3 π
, )
2 6
,
(
√
2 π
, )
2 4
θ = π/2
,
( 21 , π3 )
(0, π2 )
,
θ = π/3
θ = π/4
θ = π/6
θ=0
r=1/2
r=1
20
FCEYN — UBA — COMPLEMENTOS DE ANALISIS — SEGUNDO CUATRIMESTRE 2007
Si recordamos que la función coseno es monótona decreciente en [0, π2 ] concluimos que el radio
de esta curva también va decreciendo conforme nos movemos entre θ = 0 y θ = π2 . Esto nos
garantiza que si unimos los puntos que ubicamos antes por una curva, como se muestra en el
gráfico, vamos a obtener una aproximación razonable del verdadero gráfico de la curva dada.
Lógicamente, cuantos más puntos consideremos mejor será la aproximación.
N: en este caso es fácil reconocer de qué curva se trata pasando a coordenadas cartesianas:
π
2
(x, y) en el primer cuadrante
r2 = r cos θ
06θ6
x 2 + y2 = x
x 2 − x + y2 = 0
1
(x − 21 )2 + y2 =
4
(x, y)
en el primer cuadrante
(x, y) en el primer cuadrante
Es decir, se trata de una semicircunferencia centrada en ( 21 , 0) y radio 12 que está en el semiplano
superior.
Coordenadas cilı́ndricas
Las coordenadas cilı́ndricas (r, θ, z) de un punto (x, y, z) , (0, 0, 0) están definidas por
x = r cos θ
,
y = r sen θ
,
z=z
donde
r>0
,
0 6 θ < 2π
,
z∈R
z
(x,y,z)
r
θ
(x,y,0)
Coordenadas esféricas
Las coordenadas esféricas de (x, y, z) son (r, θ, φ) y se definen por
x = r cos θ sen φ ,
y = r sen θ sen φ ,
z = r cos φ
donde
r>0
,
0 6 θ < 2π
,
06φ6π
21
FCEYN — UBA — COMPLEMENTOS DE ANALISIS — SEGUNDO CUATRIMESTRE 2007
(x,y,z)
r
φ
θ
(x,y,0)
Parametrización
Una parametrización de una curva C es una aplicación
r : I −→ R3
donde I es un intervalo real, tal que su imagen es el conjunto de los puntos de C.
Ejemplos
1. r : R −→ R3 , r(t) = (1, −2, 9) + t(−2, 1, 1) es una parametrización de la recta que pasa por
el punto (1, −2, 9) con dirección (−2, 1, 1)
2. r : [0, 2π] −→ R2 , r(t) = (cos t, sen t) es una parametrización de la circunferencia unitaria.
Una parametrización de una superficie S es una aplicación
φ : D −→ R3
donde D es un subconjunto de R2 , tal que su imagen es el conjunto de los puntos de S .
Ejemplos
1. φ : R2 −→ R3 , φ(s, t) = P + su + tv es una parametrización del plano que pasa por el punto
P y está dirigido por los vectores (independientes) u y v.
2. φ : [0, 1] × [0, 1] −→ R3 , φ(s, t) = P + su + tv es una parametrización del paralelogramo que
tiene a los vectores linealmente independientes u y v como dos de sus lados (que concurren
en el punto P).
3. φ : [0, 2] × [0, 2π] −→ R3 , φ(r, t) = (r cos t + 1, r sen t − 2, 3) es una parametrización del
disco de radio 2 contenido en el plano z = 3 y centrado en el punto (1, −2, 3).
4. φ : [0, 2π] × [0, π] −→ R3 , φ(θ, ϕ) = (cos θ sen ϕ, sen θ sen ϕ, cos ϕ) es una parametrización
de la esfera unitaria.
N: en la página de la materia hay un apunte sobre este tema.