GIROSCOPO DE PRECESION CONTROLADA
Anuncio

RC\"ista
\1<.'xicana
de Física
21 (1972)
E IOl
ElOI-E108
GIROSCOPO DE PRECESION CONTROLADA
A. Berrondo
Facultad
d~ Cj~ncias,
Univusidad
11. del Castillo
Naci011al d~ ,\Iéxico
y E. ~leza
C~ntro d~ 11lstrUJn~ntos, Univnsidad
(Recibido:
\Ve design
ABSTRACT:
ami \\hich
and [he forces
d~ ,'léxico
agosto 20. 1972)
and construct
controllcd,
Nacional
a giroscope,
is usdul
thar cause
whose
precession
ro understand
can be
dle top nutation
ir.
I~TR()l)lJC:CIO:--:
mjenlO
Desde
1750 se han
dc los
trompos
ron pocos
o ningún
ron •.1 construírse
tales
como
de precesión
girosCl1pica
trahajol
tos de precesión
tiv,llllellt('
resultados
dispositin)s
1.1 aguja
En puo
intentado
simples
muchas
y giróscopos.
hemos
~. IlIlt<lcil)n del
estos
se podía
práctlcl)s.
utilizando
de Foucau1t
hecho
cualitativo
\11í. para
emp1eamns
rws
el comporta.
permitió
iniciales
de este
el principio
o la suspensión
un .lnálisis
trompo ..
Esto
de explicar
de los trabajos
A principios
prácticos
mo\"imicllt()s.
controLH.
formas
\-Iuchos
siglo
tuvie.
empeza.
del giróscopo
de Cardan.
de los movimien-
cIltender
en términos
un giróscopo
cuya
t:nconrrar
las
rela-
velocidad
fu('rzas
quc
E 102
Herrondo
producen
la nutación
del trompo.
[rueción de este aparato
experimentos
simples.
En esta
y se indica
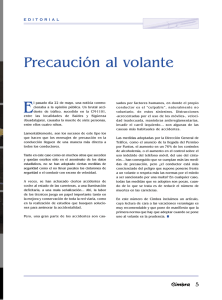
DESCRIPCION
El aparato
alrededor
está
compuesto
nota
se describe
cómo se pueden
con él algunos
DEL APARATO
por un disco
homogéneo
o volante
que gira
circular
por me-
de un eje horizontal. montado sobre una plataforma
dio de un par de postes
no a un eje vertical
Fi~. L
A y B.
que pasa
Esta
plataforma
por su centro.
(;iróscopo
de precesión
el volante,
en posición
y caos.
el diseño
realizar
el al
(Véase
canuolada.
vertical,
horizontal
puede
la Fig.
En la fotografía
y la plataforma
girar
1).
se muestra
horizontal
P.
en toc.
Girri ••C'()po r/l' IJrpcl',"¡ón, , .
E 10\
El eje horizontal o barra, que sostiene al volante, está fijo en uno de
sus extremos al poste A por medio de un perno que le permite pi,'otcar en el
sentido vertical pero que lo mantiene inmóvil en el plano horizontal; el otro
extf('mo de la barra está sostenido por el poste n mediante un perno de acero qU(' se acciona con un relevador, el cual se controla eléctricamente
desde
fuera lk') aparato, y trabaja en forma tal que deja libre el eje del volante en
dicho extr('mo.
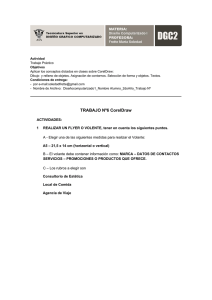
El volante está acoplado a la barra por medio de un balero que Il- per.
mit(, girar libremente con fricción despreciable.
El volante se han' girar con
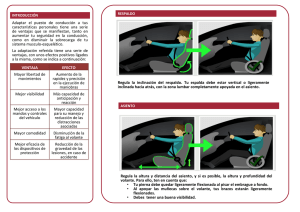
Fi~.
2,
.\tecanismo
de transmisión
an~ul ar w.
para
comunicarle
al volante
una
,,'{"IocidaJ
Berrondo
¡.; 104
ayuda de un motor pequeño
de corriente
direera,
cuyo voltaje
se puede
el
al
vaCIar
entre 1.5 y 8 vohios.
Al eje del motor se le acopló una polea mctálica en
cuya periferia va un anillo de hule para lograr una transmisión eficiente del
movimiento del motorcito al volante, a través de la fricción entre el hule yel
acero.
El motor está
te cambiar
el punto
sostenido
a la barra
de contacto
de rocación (ver Fig. 2), en esta
d(,¡ volante
con respecto
Para
te directa
hacerla
de un soporte
con el volante
respecto
forma se logra variar la velocidad
que
perrni-
al centro
angular
a la barra.
girar,
de 12 voltios
por medio
de la polea
la plataforma
por medio
está
de un eje.
acoplada
embalado
a un motor de corrienen sus
dos extremos
para evitar fricciones en la rotación, y además por Wl tramo de manguera de pared
gruesa, para tomar en cuenta la diferencia de alineamiento
de los ejes del motor y del volante.
Todo este conjunto se ha fijado a una base rígida que evita las vibraciones.
CONSTRUCCION y MEDIDAS
El volante está hecho de fierro "Hot Rolled" comercial cuya densidad
es de 8 gr/cm 3; tiene un radio de 10 cm, un espesor de 0.8 cm, y una masa de
2000 gr.
La barra está hecha de latón y el diámetro de ésta es de 1.27 cm. La
•
masa de la barra junto con el motor y su soporte es de 300 gr . Este soporte,
al igual que los dos soportes laterales,
son de duraluminio cuya densidad e.s
de 2.8 gr/cm3
FUNCION A~lI ENTO
Para el motor de la plataforma se emplea una batería de automóvil de
12 voltios y la velocidad de giro de este plato se controla por medio de un
reóstato.
El relevador para accionar el perno de soporte del eje del ,.olante
funciona con est •.l misma batería.
Para el motor pequeño, en cambio, se usa
una fuen«' de corriente directa de O a 5 voltios.
La diferencia
de masas y dimensiones
cntre el \"olao(e y el motor junto con su soporte es muy importante
ya que dc esta forma podemos
cnnsiderar
que el momento de
inercia
1 , respecto
al eje de rotación
del ,"o\;lnte,
es únicamente
d de dicho volante.
3
E 105
vador
Para {'(;'ctuar
a los controles
las cont:xion('s
manuaks
fijos
COkClOrl'S
de corricnt(:'
circuito
ei('rra
St'
conc("ntricamentc
que giran
a tra\.és
eléctricas
del motor
en la bast' de fierro,
de dos
carbon(:s,
p{'qucño y del relese colocaron
dos
con la platafonna.
d motorcito
uno para
El
)' otro para
('1 f(.J{'\'ador.
EXPERnlENTOS
El primer experimenw
miento de nutación.
Para
angular
úJ
esta
demostración
soltamos
el eje horizontal
puede
las
que el eje
observar
El dinamómetro
dir
w
y la funza
tra ('n la Fig.
s(' discut(,
de los datos
que
¡-¡J'
se muestra
d(, la Tabla
l.
tanto
ejercer
úJ como
en
n
son
del voy la
de un estroboscopio
un cronómetro.
construimos
está
se
)' consiste
de 8.5 cm dci centro
por medio
que la relación
recta
esto
3.
que se debe
cuando
en la Tabla
de los erron's
datos
s(' apf('cia
La lín('a
lJJ
se muestran
d(' magnitud
constante.
regular;
semicuantitativo
se levante.
usando
a un valor
en la Fig.
a una distancia
Con ('stos
yn
en precesión
la fuerza
se midió
observare-
al eje mencionado.
úJ
y entre
d(. la medición
4, en dond(,
('n la Re£. 1.
úJ
(} se midió
el orden
unido
es de carácter
se colocó
resuirados
se indica
con una velocidad
el relevador,
angulares
que el trompo
angular
de precesión
Los
también
\'olantt'
de un dinamómetro.
evitar
el volante
accionando
levantado
exp('rimento
La velocidad
velocidad
del
velocidades
se quede
por medio
el soporte
H para
distintas
de cero.
lante.
volante
en la fotografía
El segundo
en medir,
del
ascendente
Si ajustamos
girar
mOVI-
grande
girar la plataforma
logramos
hicimos
en mostrar el
-del orden de 600 epro. A continuación,
a una velocidad
angular n de 50 epro. Si ahora
suficientemente
hicimos
mos el mo\'imiento
r consiste
es cualitativo
sacada
1 en donde
sistemáticos
la gráfica
1~ )'
ú.J
1
al me.
que se mueses lineal,
por mínimos
como
cuadrados
E 106
Ul"trondo et al
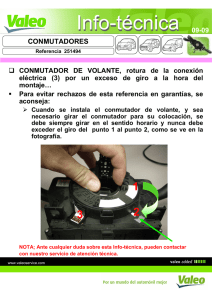
Fig.
3.
El volante
en preces:ón
TABLA
.I
(s06
regular.
1
)
49.22 :t 1.00
3.92 :t 1.00
52.36
4.90
55.50
5.88
5~.64
6.86
62.83
7.84
8.82
68.07
9.80
73.30
10.78
75.40
11.76
78.54
12.74
81.16
13.72
83.78 :t 1.00
14.70 :t 1.00
Giróscopo
dp pre,eSiL'l",
E 107
11•• 50 rpn.
FB
'"
5.24
seg-l.
(newtonsl
15
10
,
O
'0
(l/segundos)
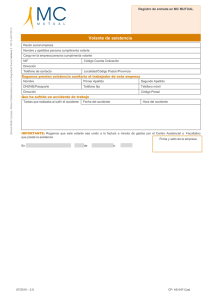
Fip:.4.
l.a fuerza FH qut.' ejerce el soporte H sobre el eje del volante para
borizontal,
como función -ie w, la \"(;'lccidad angular del
mantenerlo
vol an te.
CO~CLUSI()N
Se ha diseñado y construido un giróscopo d(, preceslcn
controlada
que. pensamos, es más útil qU(' el giróscopo normalmente empleado en los
laboratorios de Flsica para ('ntcnder los mo\'imientos del trompo.
AGRADECIMIENTO
Agradecemos al Dr. Jorge Flores sus valiosas
tribuyeron al mejor desarrollo de este trabajo.
sugerencias,
que con-
RE"ERE~ClA
1.
G. Anaya. A. B<:rrondo y J. Flores,
ñanza 21 (1972) Eú7.
Re\'. ~kx. Fís.,
Suplemento
de En:-"':-
B{'rronJo ct al
1-:108
J( ESlJ~1 EN
Se presenta
¡¡use
que
r
el diseño
de un giróscopo
que es muy úti I pam mostrar
lo causan.
cuya
el movimiento
pr{'c('sión
d<: Ilut.lción
puede
y
las
contro-
fuerzas