Sistemas de primer y segundo orden
Anuncio

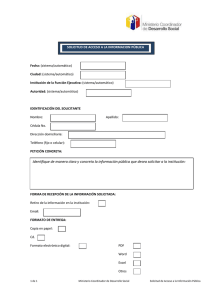
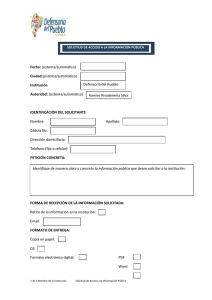
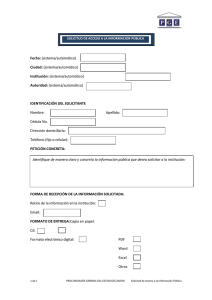
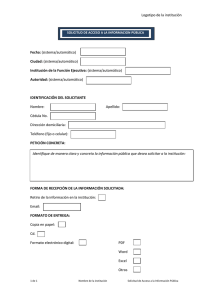
Sistemas de Control Automático. Guía 3 1 Facultad: Ingeniería. Escuela: Electrónica. Asignatura: Sistemas de Control Automático. Lugar de ejecución: Instrumentación y Control (Edificio 3, 2da planta). Se hará en dos sesiones. Sistemas de primer y segundo orden Objetivos específicos • Determinar las características principales de los sistemas de primer y segundo orden, basándose en sus respuestas en el tiempo. • Derivar la función de transferencia en el tiempo y en la frecuencia de sistemas de primer y segundo orden, a partir de las características medidas en las gráficas. Materiales y equipo • • • • • • • • • • • • • • • • • 1 COMPUTADORA CON MATLAB Y SIMULINK. 1 FUENTE DE ALIMENTACIÓN ±15 VCD [SO3538-8D]. 1 REFERENCIA DE VOLTAJE [SO3536-5A]. 1 AMPLIFICADOR DE POTENCIA [SO3536-7Q]. 1 SISTEMA CONTROLADO DE TEMPERATURA [SO3536-8T]. 1 MÓDULO CON BOMBA [SO3536-9H]. 1 SISTEMA DE CONTROL DE NIVEL [SO3536-9K]. 1 GRAFICADOR X-Y Y-t (PLOTTER). 1 VOLTÍMETRO DE BOBINA MÓVIL [SO5127-1H]. 1 INDICADOR DE TEMPERATURA [SO5127-1V]. 1 CONVERTIDOR DE PRESION A VOLTAJE [SO3535-7U]. 20 PUENTES . 1 SWITCH. 5 HOJAS DE PAPEL MILIMETRADO (El estudiante debe traerlas). 1 CONTROL PID [SO3536-6B] (o en su lugar 1 SUMADOR [SO3536-6A] y 1 CONTROL PROPORCIONAL [SO3536-5T]. 1 DIVISIÓN DE SEGUNDO ORDEN. VARIOS CABLES. 2 Sistemas de Control Automático. Guía 3 Introducción teórica Al analizar y diseñar sistemas de control, se debe disponer de una base para comparar el comportamiento de diversos sistemas. Esas bases se pueden establecer especificando diversas señales especiales de entrada y comparando respuestas de diversos sistemas ante estas señales. Una de las señales de prueba más comunes, es la señal de escalón que consiste en una transición inmediata de un valor de entrada constante a otro. Muchos criterios de diseño están basados en este tipo de señal, ya que a partir de la respuesta de salida del sistema se puede dar una clasificación y tipificarlo por medio de ciertas mediciones en la gráfica derivando una aproximación de su función de transferencia tanto para el dominio del tiempo como el de la frecuencia. Esta aproximación se hace más fiel, si el sistema no presenta atrasos de transferencia y tiempos muertos, además en sistemas cuyo denominador no sobrepasa el segundo orden. Considere el sistema cuya función de transferencia es la siguiente: C ( s) 1 = R ( s) Ts + 1 A partir de su función de transferencia se dice que el sistema es de primer orden. Si se sustituye R(s) por una señal de prueba escalón, la respuesta del sistema en el dominio de la frecuencia estará definida por la siguiente función: C ( s) = 1 A x Ts + 1 s (t ≥0) Y en el dominio del tiempo, aplicando la transformada inversa de Laplace se obtiene: ( t ≥0) Una vez conocida la respuesta general en el tiempo de un sistema de primer orden se pueden obtener los valores numéricos específicos midiendo de la gráfica en el tiempo los siguientes parámetros: Si t = T el valor c(t) es el 0.632 del valor final alcanzado, en otras palabras t = T cuando la respuesta ha alcanzado el 63.2% de su valor final. Otra característica importante de la curva exponencial es que la pendiente de la recta tangente en t = 0 es A/T. Un sistema es de segundo orden si presenta la siguiente función de transferencia: Sistemas de Control Automático. Guía 3 3 C ( s) K = 2 R ( s) As + Bs + C Por razones de conveniencia la función de transferencia se puede rescribir como: 2n C s = R s s 22 n s2n Donde: El comportamiento dinámico del sistema de segundo orden se puede escribir en términos de 2 parámetros ζ y ωn. Si 0 < ζ < 1, se dice que el sistema es subamortiguado y la respuesta transitoria presenta sobreimpulsos. La respuesta en el tiempo ante una función escalón unitario se describe con la siguiente ecuación matemática: (t ≥0) Donde: Para sistemas con amortiguamiento cero, las oscilaciones se hacen no amortiguadas y las oscilaciones son continuas: (t ≥0) Si la razón de amortiguamiento es igual a uno, se dice que el sistema está críticamente amortiguado, la ecuación matemática que define su comportamiento es: (t ≥0) El caso para el cual la razón de amortiguamiento es mayor que 1, la respuesta en el tiempo ante un escalón unitario puede escribirse como: 4 Sistemas de Control Automático. Guía 3 (t ≥0) La respuesta transitoria de un sistema de control práctico con frecuencia presenta oscilaciones amortiguadas antes de alcanzar el estado estacionario. Al especificar la respuesta transitoria de un sistema de control a una entrada de escalón unitario, es común especificar lo siguiente: 1. Tiempo de retardo, td. 2. Tiempo de crecimiento, tr. 3. Tiempo pico, tp. 4. Sobreimpulso máximo, Mp. 5. Tiempo de establecimiento, ts Figura 3.1 Respuesta en el tiempo al escalón unitario de un sistema de segundo orden. A partir de estos parámetros se puede determinar la respuesta en el tiempo y en la frecuencia, así: Sistemas de Control Automático. Guía 3 5 Excepto en ciertas aplicaciones en que no se puede tolerar oscilaciones, es deseable que la respuesta sea rápida y no presente sobreimpulsos. Así, para respuesta transitoria la relación de amortiguamiento debe estar entre 0.4 y 0.8. En síntesis el valor del amortiguamiento es inversamente proporcional a los sobreimpulsos producidos en un sistema de segundo orden. Si el sistema es aperiódico pueden utilizarse diferentes métodos tales como el de Naslin, que es válido para sistemas de segundo orden, o bien el de Strejc, que puede utilizarse para cualquier sistema aperiódico de orden superior. Este método está basado en la aproximación de un sistema de orden superior por otro sistema del mismo orden, pero con todas las constantes de tiempo iguales: El problema de definición de la función de transferencia se reduce a la determinación de τ y n. Estos parámetros se determinan gráficamente a partir de ciertas características de la respuesta, que se indican en la Figura 3.2. Figura 3.2 Respuesta al escalón unitario de un sistema aperiódico. El valor de n se obtiene según Tabla 3.1 y Tabla 3.2 a partir de las relaciones: τ a/ τ b ; τ e / τ b . En el punto de inflexión Q, que es necesario para determinar la relación τ e / τ b, se verifica d2y / dt2 = 0. Una vez que se obtiene n a partir de τ a/ τ b, es posible entrar en la segunda tabla para determinar la constante de tiempo τ. 6 Sistemas de Control Automático. Guía 3 Tabla 3.1 Tabla 3.2 Procedimiento Nota: Lea la guía de laboratorio antes de realizar los procedimientos. Esto le ayudará a clarificar el objetivo perseguido, así como le ahorrará tiempo al ejecutar la práctica, esta guia se hará en dos sesiones, un grupo de alumnos hará la Parte I y Parte IV en una sesión y el otro grupo hará la parte II y III, en la siguiente sesión se intercambian. PARTE I. SIMULACIONES EN PROGRAMA SIMULINK. 1. Abra el programa Matlab y digite el comando simulink 2. Se abrirá la ventana del buscador de librerías de Simulink que se muestra en la figura 3.3 3. De clic en el menú “File”, “new “y seleccione “Model” Figura 3.3 Buscador de Librerias de Simulink Sistemas de Control Automático. Guía 3 7 4. Cree el sistema que se muestra en la figura 3.4, arrastrando los elementos que se muestran en el buscador de librerías a la ventana del modelo, en la tabla 3.1 se encuentran las librerías donde están los elementos del sistema, para unir los elementos haga clic en los conectores que tienen los elementos, arrastre el cursor hasta el otro elemento a conectar y luego suelte. Figura 3.4 Diagrama de bloques del sistema Elemento Librería Transfer Fcn Continuous Step Sources Sum Math Operations Scope Sinks Tabla 3.3 Librerías El módulo “Transfer Fcn1” representa el modelo matemático de una planta. El módulo “Step” representa el valor de referencia aplicado con una función escalón. El módulo “Step1” representa la perturbación 5. Para acceder a los parámetros de configuración de los elementos haga doble clic sobre ellos y cambie lo siguiente: Puntos Suma (Sum): En la pestaña “Main” en “List of Signs” cambie el primer signo “+” por un signo “-“ Módulo “Step” • Step Time: 0 • Initial Value: 0 • Final Value: 1 8 Sistemas de Control Automático. Guía 3 Módulo “Step1” • Step Time: 20 • Initial Value: 0 • Final Value: 0.1 6. Para cambiar los parámetros de la simulación, haga clic en el menú “simulation” de la ventana del modelo, luego de un clic en “Configuration Parameters” y cambie lo siguiente: Start Time: 0 Stop Time: 30 Sistemas de primer orden 7. Simule el sistema, para ello seleccione en el menú “simulation” la opción “Start”, luego haga doble clic en el elemento “Scope” para ver la gráfica, presione el botón Autoscale que tiene la siguiente forma si fuera necesario. 8. Cambie la función de transferencia de la planta en el módulo “Tranfer Fcn1” a la función 1/10s+1 , para ello entre a los parámetros de configuración y cambie la propiedad de “Denominador Coefficient“ por [10 1] 9. Vuelva a simular y compare el resultado obtenido con el del numeral 7. Sistemas de segundo orden 10. Realice nuevas simulaciones definiendo como funciones de transferencia de la planta en el módulo “Tranfer Fcn1” las siguientes funciones: a) 1/s2+4s+1 b) 1/s2+2s+1 c) 1/s2+s+1 d) 1/s2+0.5s+1 e) 1/s2+1 f) 1/s2-3s+1 11. Compare los resultados obtenidos de la simulación para cada función del numeral 10. Sistemas de orden superior 12. Realice nuevas simulaciones, definiendo como funciones de transferencia de la planta en el módulo “Tranfer Fcn1” las siguientes funciones: a) 1/(s+1)4 = 1/s4+4s3+6s2+4s+1 b) 1/(s+1)6 = 1/s6+6s5+15s4+20s3+15s2+6s+1 Sistemas de Control Automático. Guía 3 9 13. Compare los resultados obtenidos en el numeral 12. 14. Apague la computadora. PARTE II. SISTEMA HIDRÁULICO DE PRIMER ORDEN 1. Arme el sistema hidráulico que se muestra en la Figura 3.5, verifique las conexiones con el docente de laboratorio (Asegúrese que NO esté presente ninguna división en el interior del tanque de agua) Figura 3.5 Disposición del sistema hidráulico. 2. La Válvula de entrada del tanque debe estar abierta por arriba, para ello gire la perilla blanca que esta encima del tanque en la esquina superior izquierda de tal forma que queden al frente los puntos verde arriba y rojo abajo, mientras que la válvula de salida debe estar abierta al mínimo, para ello gire la otra perilla blanca que esta encima del tanque en sentido de las agujas del reloj y deje al frente el primer punto verde que siga al punto rojo. 10 Sistemas de Control Automático. Guía 3 3. La perilla del módulo de la bomba (ver figura 3.5) debe estar al máximo, para ello girela completamente en el sentido de las agujas del reloj, deje abierto el SWITCH que está entre el amplificador de potencia y el módulo de la bomba. 4. Conecte la entrada Y+ y Y- del plotter a la salida del transductor de presión / voltaje y a tierra respectivamente. 5. Coloque una hoja de papel milimetrado y realice los siguientes ajustes: Selector de escala de tiempo: 0.5 s/cm Selector de operación: PEN Selector de operaciones: X1 Selector de escala: 1 V/cm Selector de calibración: CAL 6. Coloque las perillas del voltaje de referencia y del controlador PID al mínimo y encienda los equipos. 7. Conecte un voltímetro a la salida del transductor de presión/ voltaje y a tierra, en este momento deberia de dar 0 voltios ya que el nivel es cero, sino es así ajuste cuidadosamente con la perilla llamada “Zero Point” del convertidor P/V para que haya 0 voltios cuando el nivel es cero. 8. Trace una gráfica en un lugar conveniente de la hoja. 9. Coloque el valor de referencia W al 70% y el control proporcional con una ganancia que de 10V a su salida (para ello coloque KP en escala X1 y empiece a incrementar KP), manteniendo abierto el SWITCH que esta entre el amplificador de potencia y el módulo de la bomba. 10. Aumente el selector de escala de tiempo del plotter a 5s/cm y comience a trazar la gráfica, cuando la pluma haya recorrido dos o tres centimetros cierre el SWITCH que esta entre el amplificador de potencia y el módulo de la bomba y espere que se estabilice la respuesta. 11. De la gráfica mida el tiempo para el cual el nivel llega al 63.2% de su valor final. T ≈ __________________. 12. A partir de la gráfica, calcule la constante de tiempo (T) por medio de la pendiente de la gráfica en tiempo igual a cero con la siguiente relación: T=__________ 13. Compare los resultados de los numerales 11 y 12 de la parte II ¿Qué puede concluir de estos Sistemas de Control Automático. Guía 3 11 valores? ¿Es el sistema de primer orden? Explique. PARTE III. SISTEMA HIDRÁULICO DE SEGUNDO ORDEN 14. Abra el SWITCH que esta entre el amplificador de potencia y el módulo de la bomba y reduzca las perillas del voltaje de referencia y el controlador PID al mínimo, luego introduzca la división correspondiente en el tanque para sistemas de segundo orden que tiene la forma presentada en la siguiente figura: Figura 3.6 Vista de planta de la división de segundo orden Esta división debe ubicarse en la parte intermedia del tanque con el fin de quedar dividido en dos partes, dejando el orificio más pequeño en la parte inferior del tanque, con esto lo que se pretende hacer es colocar dos tanques en cascada, el que recibe el caudal de entrada y el segundo recibe por medio del orificio pequeño un caudal proveniente del primer tanque. Con este proceso el sistema adquiere un orden superior. 15. Cuando el tanque ya este vacío, repita los pasos del 5 al 8 de la II parte. 16. Aumente el selector de escala de tiempo del plotter a 5 s/cm y grafique las respuestas del sistema tal como hizo en el paso 10 de la II parte, pero esta vez ajuste el módulo de referencia y controlador proporcional,de la siguiente manera: W=40% Calibre Kp para tener 10V a la salida del controlador proporcional. W=60% Calibre Kp para tener 10V a la salida del controlador proporcional. 17. Una vez terminadas las gráficas identifique el tipo de segundo orden al que pertenece cada sistema, tome las mediciones necesarias para calibrar la escala de presión contra tiempo en las hojas de papel milimetrado. 18. Regrese las perillas del voltaje de referencia y controlador PID al mínimo y apague en orden inverso a como se encendió todo el equipo. 19. Retire la pluma del plotter , desconecte los cables y puentes de los módulos y guardelos en su lugar. PARTE IV. SISTEMA TÉRMICO 20. Inserte los módulos del sistema térmico en el orden que se muestra en la Figura 3.7 12 Sistemas de Control Automático. Guía 3 Figura 3.7 Montaje del sistema Térmico. 21. Regrese las perillas del voltaje de referencia y del controlador proporcional al mínimo, si está ocupando un controlador PID, los interruptores de la parte superior (AB(D) y AB(I)) deben estar hacia arriba, esta vez debe colocar el SWITCH en el sistema térmico el cual debe dejar abierto al igual que el interruptor que cortocircuita la resistencia del sistema térmico. No olvide el puente que conecta los 10VCD con la referencia de voltaje (puente #1). 22. Conecte la entrada Y+ del graficador a la salida del transductor temperatura/ voltaje y la entrada Y- del mismo a tierra. 23. Coloque una hoja de papel milimetrado en el graficador y realice los siguientes ajustes: Selector de escala de tiempo: 0.5 S/cm Selector de operación: PEN Selector de repeticiones: X1 Selector de escala en Y: 1 V/cm Selector de calibración: CAL 24. Encienda el Plotter y coloque la pluma por medio de la perilla del selector vertical del graficador, en un lugar conveniente de la hoja y luego trace la gráfica de temperatura 0 ° C, aumente el selector de escala de tiempo a 10 s/cm, encienda la fuente y trace la gráfica de temperatura ambiente. Sistemas de Control Automático. Guía 3 13 25. Conecte un voltímetro (escala 10V) a la salida del módulo amplificador de potencia, ajuste el módulo de referencia de voltaje al 80% y la ganancia KP del control proporcional hasta llegar a 8.5 VCD. 26. Inicie la graficación en estas condiciones y espere a que la pluma haya recorrido un centímetro, ahora cierre el SWITCH que colocó en el sistema térmico y espere a que estabilice la temperatura. 27. Identifique al sistema térmico de acuerdo a la respuesta en el tiempo que obtuvo y encuentre su modelo matemático. 28. Regrese las perillas del voltaje de referencia y controlador PID al mínimo y apague en orden inverso a como se encendió todo el equipo. 29. Retire la pluma del plotter , desconecte los cables y puentes de los módulos y guardelos en su lugar. 30. Para cada sistema obtenga el modelo matemático correspondiente tanto en el dominio del tiempo como en el de la frecuencia. 31. Usando el programa MATLAB y el modelo de cada uno de los sistemas grafique su respuesta y compárela con los resultados prácticos. Análisis de Resultados 1. Responda las interrogantes planteadas a lo largo del procedimiento. Investigación Complementaria Investigue sobre las posibles causas por las cuales un presunto sistema de primer o segundo orden, no sigue las características típicas de su respuesta en el tiempo. Bibliografía • INGENIERÍA DE CONTROL MODERNA. Tercera Edición. Prentice Hall. Katsuhiko Ogata, Biblioteca UDB, Clasificación: Libro interno 629.8 O34 1998 • SISTEMAS DE CONTROL AUTOMÁTICO. Séptima Edición. Prentice Hall. Benjamín Kuo, Biblioteca UDB, Clasificación: 621.3811 K95 1996 • SISTEMAS DE CONTROL LINEAL. Primera Edición en Español. McGraw Hill. Charles Rohrs, Biblioteca UDB, Clasificación: Libro 621.3811 R739 1994 14 Sistemas de Control Automático. Guía 3 Hoja de cotejo: 3 Guía 3: Sistemas de primer y segundo orden Puesto No: Alumno: GL: Docente: Fecha: EVALUACION % 1-4 CONOCIMIENTO 25 APLICACIÓN DEL CONOCIMIENTO 70 ACTITUD 2.5 Conocimiento deficiente de los siguientes fundamentos teóricos: -Características de los sistemas de primer orden. -Características de los sistemas de segundo orden. -Características de sistemas de orden superior. Cumple con uno de los siguientes criterios: -Puede simular sistemas de control con Simulink. -Identifica a partir de las gráficas de que orden es el sistema. -Obtiene el modelo mátematico del sistema a partir de las gráficas. Es un observador pasivo. 2.5 TOTAL Es ordenado pero no hace un uso adecuado de los recursos. 5-7 8-10 Conocimiento y explicación incompleta de los fundamentos teóricos. Conocimiento completo y explicación clara de los fundamentos teóricos. Cumple con dos de los criterios. Cumple con los tres criterios. Participa ocasionalmente o lo hace constantemente pero sin coordinarse con su compañero. Hace un uso adecuado de lo recursos, respeta las pautas de seguridad, pero es desordenado. Participa propositiva e integralmente en toda la práctica. Hace un manejo responsable y adecuado de los recursos conforme a pautas de seguridad e higiene. Nota