Clase 3
Anuncio

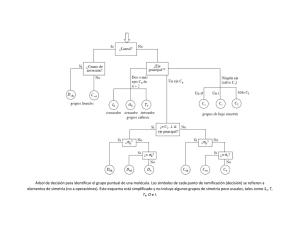
Proyección esterográfica o estereograma El estereograma constituye un modo conveniente para representar en un plano la simetría de objetos tridimensionales. Podemos imaginar una esfera, como la de la figura de la derecha, en la que marcamos con O su centro y denotamos NOS al diámetro que pasa por sus polos Norte y Sur. Si trazáramos el circulo ecuatorial perpendicular a NOS y un radio de la esfera que llegue al punto P sobre la superficie de la esfera, la línea recta que una S con P cortará al plano ecuatorial en el punto X. Dicho punto X es la proyección estereográfica del punto P. En el caso del punto Si, que está en el hemisferio sur, ver figura, su proyección estereográfica debe hacerse desde el polo norte. Para distinguir las proyecciones provenientes del polo Norte o Sur respectivamente podrían emplearse caracteres con colores invertidos, como en la figura o círculos y circunferencias. Lo que llamamos estereograma es el círculo ecuatorial visto desde el polo norte y puede emplearse cuantitativamente para dibujar medidas goniométricas precisas Vamos a ver que nos permite describir la simetría puntual de una molécula, un cristal o un objeto simétrico cualquiera. La figura de la izquierda muestra los estereogramas correspondientes a las simetría de un objeto en el que sólo existe la simetría de identidad (1), y ejes propios de rotación de distinto orden compatibles con la existencia de simetría de traslación (2, 3, 4,y 6).En el centro del círculo se muestra la notación usual para los distintos órdenes de ejes propios. Los círculos pueden representar un motivo, un átomo de una molécula o las perpendiculares a las caras de un cristal. Por ej. el estereograma 4 podría ser la representación de las simetrías del prisma cuadrado de la derecha.Estos puntos sulen denominarse equivalentes. Para 1 sólo existe (x, y, z). El eje doble genera dos putos equivalentes ((x, y, z) y (-x, y, -z). Los elementos de simetría impropios (o ejes de roto inversión) dan lugar a los 5 estereogramas de la derecha Todos los círculos llenos están situados a la misma distancia por encima del plano y los vacios a la misma distancia por debajo del plano. Los vacios indican distinta quiralidad. En el caso del eje impropio de orden 3 para generar el estereograma si empezamos en el punto S la primera operación de simetría sería una rotación en 120⁰ en sentido anti horario dando lugar al punto 4 y luego la inversión que da lugar al punto 1 (con otra quiralidad), la segunda rotoinversión genera al punto 2 recuperando la quiralidad inicial. Si siguiéramos aplicando la roto-inversión se irían generado los distintos puntos del estereograma hasta regresar al punto 6 coincidente con S. Para denotar la existencia de un plano espejo coincidente con el plano de proyección se ensancha la línea de la circunferencia. Notar: que el eje impropio de orden 1 coincide con la inversión.. El eje 2 impropio coincide con un plano espejo, el eje impropio de orden 6 con un eje de orden 3 perpendicular a un plano espejo (3/m). Los puntos equivalentes relacionados por la inversión son (x, y, z) y (-x,-y,-z). Los relacionados por un plano espejo perpendicular a y son (x, y, z) y (x, -y, z). Si en el objeto en análisis pudiéramos distinguir dos ejes de simetría perpendiculares, estos darían lugar a un tercero como se puede apreciar en la siguiente figura (a) a 222 322 (32) 422 (b) 332(23) 432 Sólo las combinaciones de ejes 222, 322, 422, 622, 332 y 432 son compatibles con la simetría de traslación en 3D. En el estereograma del grupo 222, figura anterior (a) pueden apreciarse los pasos seguidos para construir el estereograma. En este grupo los tres ejes son independientes. No pasa lo mismo en el grupo 322 donde el eje 3 y un eje 2 son suficientes para generar los otros dos ejes dobles por eso también se lo nota como 32. En el grupo 422los ejes B y C están relacionados por un eje cuádruple, parecería no ser necesario notarlo 422, sin embargo si aplicamos las correspondientes operaciones de simetría encontraremos que dan lugar a otro par de ejes dobles D a 45⁰ de los anteriores. Por lo tanto en el símbolo 422, el 4 representa el eje de orden 4 y los dos números 2 a los dos conjuntos de ejes de orden 2. En la figura anterior (b) los ejes de rotación en 432 son únicos, pero en el cúbico 332 los ejes de rotación de orden 3 estan relacionados por ejes de rotación de orden 2 no son únicos y por lo tanto el símbolo corto que se emplea es el 23 para poder diferenciarlo del trigonal 32 mostrado en la parte (a) de la figura. En la Tabla que sigue podemos ver que pueden reconocerse 7 clases de grupos de simetría de acuerdo al orden de los ejes de simetría que incluyen ORDEN Y NÚMERO DE EJES CLASE DE ROTACIÓN 1 Triclínico 2 Monoclínico 222 Ortorrómbico 3, 322 4, 422 6, 622 332, 432 Trigonal Tetragonal Hexagonal Cúbico 1 eje de orden 1 1 eje de orden 2 3 ejes de orden 2 independientes 1 eje de orden 3; 1 eje de orden 4 1 eje de orden 6 3 ejes de orden 3 Para ver una Tabla incluyendo las rotaciones impropias, que nos llevarán a los 32 grupos puntuales y a partir de la cual podrán ver ejemplos dinámicos de las operaciones de simetría en cada grupo ir a: http://www.xtal.iqfr.csic.es/Cristalografia/index-en.html oa http://www.xtal.iqfr.csic.es/Cristalografia/index.html Para seguir avanzando debemos ver cómo se pueden combinar los grupos de simetría planos con las redes de Bravais planas para encontrar todas las posibilidades de simetrías que puedan aparecer en un cristal bidimensional. Es decir ver como se puede acomodar en un plano una base o motivo (con o sin simetrías) para dar lugar a un cristal 2D. En paralelo con el desarrollo de cómo se llegó a la clasificación compacta de los cristales mediante el análisis de grupos de simetría puntual y redes de Bravais que llenen todo el espacio (de 2 o 3 D), necesitamos revisar temas de algebra vectorial y matricial. La clase 4 que se pondrá en la página entre mañana y pasado contiene toda la información que necesitan manejar al respecto con ejemplos.