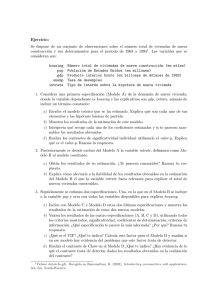
MÉTODO DE LOS ELEMENTOS FINITOS. Preproceso y
Anuncio

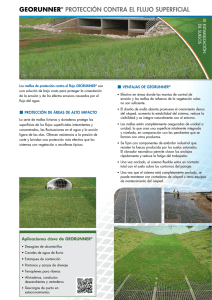
C GM Pre y Postproceso Felipe Gabaldón Introducción MÉTODO DE LOS ELEMENTOS FINITOS. Preproceso y Postproceso de Resultados Generación de mallas Estimación de error Remallaje adaptativo h Felipe Gabaldón Castillo Suavizado de tensiones Referencias GM C Madrid, 20 de Diciembre de 2007 Índice Pre y Postproceso Felipe Gabaldón 1 Introducción 2 Generación de mallas 3 Estimación de error 4 Remallaje adaptativo h 5 Suavizado de tensiones 6 Referencias Introducción Generación de mallas Estimación de error Remallaje adaptativo h Suavizado de tensiones Referencias C GM Introducción Pre y Postproceso Felipe Gabaldón Introducción Generación de mallas Estimación de error Remallaje adaptativo h Suavizado de tensiones GM C Referencias Pre y Postproceso Felipe Gabaldón Introducción Generación de mallas Estimación de error Remallaje adaptativo h Suavizado de tensiones Referencias En la simulación computacional de un problema mediante elementos finitos, todos los pasos referentes a la definición del modelo (previos a la solución de las ecuaciones algebraico-diferenciales) constituyen el preproceso. Dentro del preproceso, la generación de la malla es una parte clave ya que para geometrı́as complejas requiere un tiempo importante y no se trata de una operación trivial. Por otra parte la malla debe estar correctamente diseñada ya que la calidad de los resultados depende de la calidad de aquella. Tipos de malla Malla conforme/no conforme. En una malla conforme los elementos adyacentes comparten nodos o caras. C GM Tipos de malla Pre y Postproceso Felipe Gabaldón Introducción Malla estructurada/no estructurada. En una malla estructurada cada nodo del interior es compartido por el mismo número de elementos. Generación de mallas Estimación de error Remallaje adaptativo h Suavizado de tensiones GM C Referencias Pre y Postproceso Felipe Gabaldón Introducción Generación de mallas Estimación de error Remallaje adaptativo h Suavizado de tensiones Referencias Propiedades de los elementos Propiedades de tipo geométrico: La variación de tamaño entre elementos adyacentes debe ser progresiva. La densidad de elementos en algunas regiones de la malla debe ser más alta (gradientes elevados de la solución). En las mallas de elementos triangulares se deben evitar los ángulos obtusos. En general, los elementos deben ser suficientemente regulares y satisfacer ciertas propiedades relativas a su forma (distorsión, esbeltez, etc). Propiedades de tipo fı́sico: Puede haber aspectos fı́sicos del problema que condicionen la geometrı́a de los elementos: anisotropı́a, formas de los elementos impuestas, etc. C GM Algoritmos de generación de mallas Pre y Postproceso 1 Manual o semi-automático. Felipe Gabaldón 2 Métodos basados en la transformación de un dominio con geometrı́a simple. 3 Métodos basados en la solución de un sistema de ecuaciones en derivadas parciales. 4 Métodos basados en la deformación y modificación local de una malla sencilla. 5 Métodos basados en la composición de mallados de subconjuntos del dominio a mallar, obtenidos por métodos del tipo 2 o del tipo 3. Métodos automáticos que obtienen la malla final, elemento por elemento, a partir de la definición del contorno: Introducción Generación de mallas Estimación de error Remallaje adaptativo h Suavizado de tensiones Referencias 6 GM C Métodos de avance frontal Algoritmos basados en la construcción de Voronoi-Delauny Métodos de avance frontal Pre y Postproceso Felipe Gabaldón Introducción Generación de mallas Estimación de error Remallaje adaptativo h Suavizado de tensiones Referencias Desarrollado originalmente por Cavendish [1] y Lo [2] para elementos triangulares, y generalizado posteriormente por Peraire et al. [3] para elementos tetraédricos. La extensión para elementos cuadriláteros o hexaédricos no es fácil. Existen trabajos para cuadriláteros (Zhu y Zienkiewicz [1] y Rank et al. [2]), pero no para hexaedros. El dato de partida es una discretización del contorno (segmentos en 2D y triángulos en 3D). El procedimiento es iterativo: se parte de un frente al que se le añaden elementos volviendo a actualizar el frente. C GM Pre y Postproceso Métodos de avance frontal. Ejemplo Patrones tipo para la redefinición del frente Felipe Gabaldón Introducción Generación de mallas Estimación de error Remallaje adaptativo h Ejemplo de propagación del frente Suavizado de tensiones GM C Referencias Pre y Postproceso Felipe Gabaldón Introducción Triangulación de Voronoi-Delauny Una triangulación de Delauny verifica que las circunferencias (esferas) circunscritas a cada triángulo (tetraedro) no contienen vértices de otros elementos. Generación de mallas Estimación de error Remallaje adaptativo h Suavizado de tensiones Referencias Uniendo los centros de las circunferencias (esferas) circunscritas a todos los triángulos (tetraedros) que comparten un vértice se obtienen los polı́gonos (poliedros) de Voronoi. C GM Triangulación de Voronoi-Delauny. Ejemplo Pre y Postproceso Felipe Gabaldón Introducción Generación de mallas Estimación de error Remallaje adaptativo h Suavizado de tensiones GM C Referencias Introducción Pre y Postproceso Felipe Gabaldón Introducción Generación de mallas Estimación de error Remallaje adaptativo h Suavizado de tensiones Referencias El método de los elementos finitos proporciona una solución aproximada del problema de contorno analizado. En consecuencia, dicha solución está afectada por diversas fuentes de error. Tipos de error en la solución de elementos finitos: 1 2 3 4 5 Error de discretización. Error de aproximación de la geometrı́a. Error en el cálculo de las integrales del elemento. Errores en la solución del sistema de ecuaciones. Errores asociados a la ecuación constitutiva. C GM Pre y Postproceso Felipe Gabaldón Introducción Definición del error El error es la diferencia entre la solución exacta y la solución aproximada Esta definición puede expresarse mediante: Generación de mallas Eu (x) = u(x) − uh (x) (1) Estimación de error Eε (x) = ε(x) − εh (x) (2) Remallaje adaptativo h Eσ (x) = σ(x) − σh (x) (3) Suavizado de tensiones Referencias La determinación del error local mediante (1), (2) o (3) no es conveniente en general. Es conveniente introducir normas del error que representen una cantidad escalar integral del mismo: GM C E = ||E|| Pre y Postproceso Felipe Gabaldón Introducción (4) Definición del error Norma energética del error: Z 1 Z 1 2 2 −1 ||Eε || = Eε · CEε dΩ , ||Eσ || = Eσ · C Eσ dΩ Ω Ω (5) Generación de mallas Estimación de error Remallaje adaptativo h Suavizado de tensiones Referencias Norma L2 del error: 1/2 Z ||Eu || = Eu · Eu dΩ (6) Ω Localizando la expresión (4) sobre un elemento se obtiene el error local E e : Z 1/2 E e = ||Ee ||, ||Ee || = (7) Ωe Con estas normas, la relación entre el error global y los errores locales viene dada por un sumatorio. C GM Estimadores de error para análisis lineal Pre y Postproceso Felipe Gabaldón 1 Extrapolación de Richardson (Zienkiewicz y Morgan, 1983) [3] Generación de mallas 2 Estimadores residuales (Babuška y Rheinboldt, 1978) [1] Estimación de error 3 Estimadores basados en problemas locales de Neumann (Bank y Weiser, 1985) [2] 4 Estimadores basados en problemas locales de Dirichlet (Babuška y Rheinboldt, 1978) [3] 5 Estimadores basados en técnicas de suavizado (Zienkiewicz y Zhu, 1987) [1] Introducción Remallaje adaptativo h Suavizado de tensiones GM C Referencias Estimador Z 2 Pre y Postproceso Felipe Gabaldón Introducción Generación de mallas Estimación de error Remallaje adaptativo h Suavizado de tensiones Referencias Parte de la idea de que el campo de tensiones alisado σ ∗ es una aproximación mejor que la solución obtenida con el MEF (con proyección discontinua en los nodos). El estimador de error en cada punto se define como: Eσ = σ ∗ − σ (8) Existen diversos procedimientos para obtener el campo de tensiones alisado. Se demuestra que la tasa de convergencia con este m estimador de error es ||Eσ || = O(h ), siendo m el grado de las funciones de forma del campo de desplazamientos, y h el tamaño medio de los elementos. C GM Estimador Z 2 Pre y Postproceso Felipe Gabaldón Introducción Generación de mallas Estimación de error Remallaje adaptativo h Suavizado de tensiones GM C Referencias Pre y Postproceso Felipe Gabaldón Introducción Generación de mallas Estimación de error Remallaje adaptativo h Suavizado de tensiones Referencias Solución “aceptable” Generalmente se dice que la solución es “aceptable” si se satisfacen las dos siguientes condiciones: 1 Condición de error global. La norma energética del error global debe ser menor que un tanto por ciento de la energı́a de deformación total: Z 1/2 ||Eσ || ≤ η||U||, ||U|| ≈ σ ∗ · C−1 σ ∗ dΩ (9) Ω 2 Condición de malla óptima. La distribución de los elementos en la malla ha de satisfacer un “criterio de malla óptima”: ||Eeσ || = ||Eeσ ||r (10) siendo ||Eeσ ||r el valor requerido de la norma de error del elemento e, y que está definido de acuerdo con el criterio de malla óptima elegido. C GM Pre y Postproceso Felipe Gabaldón Introducción Generación de mallas Estimación de error Remallaje adaptativo h Suavizado de tensiones Referencias Condición de error global La desigualdad (9) permite definir un parámetro de error global ξg como: ||Eσ || ξg = (11) η||U|| ξg = 1 indica que se verifica la condición de error global. ξg > 1 y ξg < 1 indican que el tamaño de los elementos debe refinarse o desrefinarse, respectivamente. El nuevo tamaño del elemento b he será: e h e b (12) h = 1/m ξg GM C Como el valor de ξg es el mismo para toda la malla, todos los elementos modificarı́an su tamaño en igual proporción. En consecuencia es necesario introducir un criterio de error local que permita modificar el tamaño de los elementos de manera selectiva en diversas partes de la malla. Condición de malla óptima Pre y Postproceso Felipe Gabaldón Introducción Generación de mallas Estimación de error Remallaje adaptativo h Suavizado de tensiones Referencias De la expresión (10) se puede definir un parámetro de error local como: ||Eeσ || e ξ = (13) ||Eeσ ||r e ξ = 1 indica que el tamaño de elemento es óptimo, e e ξ > 1 y ξ < 1 indican que el tamaño del elemento debe disminuirse o agrandarse, respectivamente. Se puede definir único parámetro de refinamiento del elemento que englobe los dos anteriores: ||Eσ ||||Eeσ || ξ = ξg ξ = η||U||||Eeσ ||r e e (14) C GM Estrategia de refinamiento de la malla Pre y Postproceso De acuerdo con los conceptos anteriores, se puede diseñar una estrategia de refinamiento con los siguientes objetivos: Felipe Gabaldón 1 Introducción Generación de mallas 2 Estimación de error Obtener una distribución óptima de tamaños de elemento, que satisfaga (10). Conseguir que el error global satisfaga (11) Con el primer criterio, se hace la modificación del tamaño: Remallaje adaptativo h e hξe = he (ξ )−1/q Suavizado de tensiones (15) y la segunda modificación es: Referencias e −1/m h = hξe ξg (16) GM C En todo lo anterior, la definición del error requerido en cada elemento es clave. Esta definición puede basarse en diferentes criterios de malla óptima. Pre y Postproceso Criterios de malla óptima 1 Este criterio de malla óptima supone que la distribución de elementos en una malla es óptima si el error global se reparte por igual en todos los elementos: Felipe Gabaldón Introducción ||Eσ || ||Eeσ ||r = √ n Generación de mallas Estimación de error Remallaje adaptativo h Suavizado de tensiones Referencias Equidistribución del error global 2 (17) Equidistribución del error especı́fico Una alternativa al criterio anterior es suponer que una malla es óptima si el error por unidad de área (o volumen) es el mismo en toda la malla: ||Eeσ || ||Eσ || √ = √ (18) Ωe Ω Comparando (10) y (18) se obtiene que el error elemental requerido es: e 1/2 Ω e ||Eσ ||r = ||Eσ || (19) Ω C GM Ejemplo Pre y Postproceso Felipe Gabaldón Introducción Generación de mallas Estimación de error Remallaje adaptativo h Suavizado de tensiones GM C Referencias Pre y Postproceso Felipe Gabaldón Introducción Generación de mallas Estimación de error Remallaje adaptativo h Suavizado de tensiones Referencias Introducción En la práctica tiene interés obtener el valor de las tensiones en los nodos: dibujo de contornos, estimación de error, etc. Por ejemplo, para el nodo i del elemento e: σi = CB(ξi )de (20) El inconveniente de la expresión anterior es que en la formulación estándar del MEF los requisitos de continuidad se exigen al campo de desplazamientos y no a las tensiones. Para obtener un sólo valor de las tensiones en cada nodo es necesario alisar las tensiones nodales. C GM Pre y Postproceso Felipe Gabaldón Extrapolación y alisado global Con este procedimiento se extrapolan a los nodos los valores de las tensiones en todos los puntos de Gauss de la malla. Introducción Generación de mallas Estimación de error Remallaje adaptativo h ∗ σ = Suavizado de tensiones Referencias n X (21) i=1 siendo: Ni = Ni 1nσ GM C σie Ni = NσAe y e σ1 σe 2 e σA = .. . e σn (22) Extrapolación y alisado global Pre y Postproceso Felipe Gabaldón Introducción Generación de mallas Estimación de error Remallaje adaptativo h Suavizado de tensiones El error entre la solución alisada y la global en cada punto es: e = σ ∗ − σ = NσAe − CBde (23) El problema se transforma ahora en uno de mı́nimos cuadrados, en el que se minimiza el error medio dado por la expresión integral: Z F = (σ ∗ − σ) · (σ ∗ − σ)dΩ (24) Ωe Referencias resultando: ∂F =2 ∂σAe Z Ωe NT · (σ ∗ − σ)dΩ = 0 (25) C GM Extrapolación y alisado global Pre y Postproceso Felipe Gabaldón Introducción Generación de mallas Estimación de error Remallaje adaptativo h Suavizado de tensiones Referencias En la ecuación (25), llamaremos: Z Z Me = NT NdΩ; re = Ωe NT σdΩ Las matriz Me y el vector re se ensamblan en la forma estándar: nelm def M= A Me , e=1 r nelm def = re e=1 A GM C Felipe Gabaldón Introducción (27) obteniéndose las tensiones nodales alisadas: σA = M−1 r Pre y Postproceso (26) Ωe (28) Extrapolación y alisado local El procedimiento explicado en el apartado anterior se aplica a cada elemento por separado: σAe = Me −1 re (29) Generación de mallas Estimación de error Remallaje adaptativo h Suavizado de tensiones Referencias Las tensiones nodales obtenidas son discontinuas. El valor final de cada nodo es el valor medio de las tensiones de cada uno de los elementos que comparten el nodo. Un método más directo es la extrapolación de las tensiones en los puntos de Gauss a los nodos del elemento mediante las funciones de forma modificadas para que valgan uno o cero en los puntos de Gauss: C GM Pre y Postproceso Felipe Gabaldón Introducción Generación de mallas Estimación de error Remallaje adaptativo h Suavizado de tensiones Referencias Bibliografı́a Cavendish, J.C. Automatic triangulation of arbitrary planar domains for the finite element method. International Journal for Numerical Methods in Engineering. Vol 8. pp 679–696, 1974. Lo, S.H. A new mesh generation scheme for arbitrary planar domains. International Journal for Numerical Methods in Engineering. Vol 21. pp 1403–1426, 1985. GM C Peraire, J., Vahdati, M., Morgan, K. and Zienkiewicz, O.C. Adaptive remeshing for compressible flow computations. Journal of Computational Physics. Vol 72. pp 449–466. 1987. Bibliografı́a (cont.) Pre y Postproceso Felipe Gabaldón Introducción Generación de mallas Estimación de error Remallaje adaptativo h Suavizado de tensiones Referencias Zhu, J.Z., Zienkiewicz O.C., Hinton. E. and Wu, J. A new approach to the development of automatic quadrilateral mesh generation. International Journal for Numerical Methods in Engineering. Vol 32. pp 849–866, 1991. Rank, E., Schweingruber, M. and Sommer, M. Adaptive mesh generation. Communications in Applied Numerical Methods. Vol 9. pp 121–129. 1993. Zienkiewicz, O. y Morgan, K. Finite elements and approximation. John Wiley and Sons, 1983. C GM Bibliografı́a (cont.) Pre y Postproceso Felipe Gabaldón Introducción Generación de mallas Estimación de error Remallaje adaptativo h Suavizado de tensiones Referencias Babuška, I. y Rheinboldt, W. Error estimates for adaptive finite element computations. SIAM Journal of Numerical Analysis, tomo 15:págs. 736–754, 1978a. Bank, R. y Weiser, A. Some a posteriori error estimators for elliptic partial differential equations. Mathematics of Computation, tomo 44:págs. 283–301, 1985. GM C Babuška, I. y Rheinboldt, W. A posteriori error estimates for the finite element method. International Journal for Numerical Methods in Engineering , tomo 12:págs. 1597–1613, 1978b. Bibliografı́a (cont.) Pre y Postproceso Felipe Gabaldón Introducción Generación de mallas Estimación de error Remallaje adaptativo h Suavizado de tensiones Referencias Zienkiewicz, O. y Zhu, J. A simple error estimator and adaptive procedure for practical engineering analysis. International Journal for Numerical Methods in Engineering , tomo 24:págs. 337–357, 1987. Oñate, E. Cálculo de Estructuras por el Método de Elementos Finitos. Análisis estático lineal. CIMNE. Segunda edición, 1995. George, P.L. Automatic Mesh Generation. Application to Finite Element Methods. Wiley. 1991. C GM Páginas web Pre y Postproceso Felipe Gabaldón Introducción Generación de mallas Estimación de error Remallaje adaptativo h Suavizado de tensiones Referencias Pre y postprocesador gmsh http://geuz.org/gmsh/ Scientific Applications on Linux (Discrete Methods & Related Tools): http://ceu.fi.udc.es/SAL/index.shtml Meshing Research Corner http://www.andrew.cmu.edu/user/sowen/mesh.html Pre y postprocesador GID http://gid.cimne.upc.es Generador de mallas EMC2 http://www-rocq1.inria.fr/gamma/cdrom/www/ emc2/eng.htm