Document
Anuncio

El Juego como Problema de Búsqueda
En este algoritmo identificamos dos jugadores: max y min. El objetivo es
encontrar la mejor movida para max.
Supondremos que max mueve inicialmente y que luego se turnan para jugar.
El espacio de búsqueda queda definido por:
Estado inicial: Es una configuración inicial del juego más una indicación de
quién tiene la próxima movida.
Operadores: Corresponden a las jugadas legales se pueden hacer en el juego.
Condición Terminal: Determina cuándo el juego se acabó.
Función de Utilidad: Da un valor numérico a una configuración final de un
juego. En un juego en donde se puede ganar, perder o empatar, los valores
pueden ser 1, 0, o -1.
Generalmente no es posible buscar a una profundidad tal que permita llegar a las
hojas del árbol.
Jorge Baier Aranda, PUC
1
Por esa razón, se considera generalmente una función de evaluación de estados
que califica a los estados según qué tan buenos son para max.
Jorge Baier Aranda, PUC
2
El espacio de búsqueda
Suponiendo que max es el que comienza el juego el espacio de búsqueda se ve
como un árbol en el cual:
• Los nodos que están a profundidad par (suponiendo la raı́z está a profundidad
0) corresponden a turnos del jugador max.
• Los nodos que están a profundidad impar corresponden a turnos del jugador
min.
Jorge Baier Aranda, PUC
3
El algoritmo Minimax
El algoritmo Minimax con profundidad limitada es el siguiente:
Generar el árbol de búsqueda hasta un nivel de profundidad 2k. En este árbol,
la primera movida corresponde a una jugada para max, por lo que las hojas
del árbol generado corresponden a configuraciones en donde min ha jugado por
última vez.
Aplicar la función de evaluación a cada hoja del árbol.
Repetir mientras k ≥ 1
• Calcular la utilidad de los nodos de nivel 2k − 1 como la mı́nima utilidad entre
la de sus hijos.
• Calcular la utilidad de los nodos de nivel 2k − 2 como la máxima utilidad entre
la de sus hijos.
• k =k−1
La mejor jugada corresponde al hijo de mayor utilidad en del nodo inicial.
Jorge Baier Aranda, PUC
4
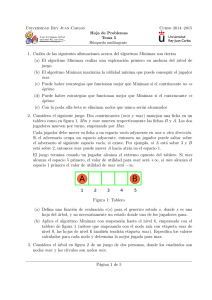
El Gato: un ejemplo sencillo
Para ejemplificar el algoritmo, consideremos el juego del gato. En este juego
podemos usar la siguiente función de evaluación para un tablero t:
E(t) = NA(t) − NC (t)
donde NA(t) es el número de filas, columnas o diagonales abiertas para max
(donde aún puede ganar) y NC (t) es el número de filas, columnas o diagonales
abiertas para min.
Si t es un tablero ganado por max, E(t) = ∞ y si es un tablero perdido,
E(t) = −∞ (aquı́ en vez de ∞ podrı́amos haber ocupado otro valor).
La figura 1 muestra el algoritmo Minimax con un árbol de profundidad 2. La
figura 2 muestra otro árbol con profundidad 2, pero luego que min ya ha jugado
en una de las posiciones del tablero. Finalmente, la figura 3 muestra la última
etapa de la búsqueda.
Jorge Baier Aranda, PUC
5
Figura 1: Primera etapa en la búsqueda del gato
Jorge Baier Aranda, PUC
6
Figura 2: Segunda etapa en la búsqueda del gato
Jorge Baier Aranda, PUC
7
Figura 3: Última etapa en la búsqueda del gato
Jorge Baier Aranda, PUC
8
La poda Alfa-Beta
En muchos juegos minimax es ineficiente. Para ello, es posible usar la poda
alfa-beta.
Consideremos el árbol de juego de la última etapa del gato (figura 3). Supongamos
que un nodo hoja es evaluado en cuanto es generado.
Después de evaluar el nodo A no tiene sentido seguir generando ni evaluando los
nodos B, C o D.
El mismo tipo de poda se puede aplicar cuando las posiciones en la búsqueda no
representan juegos ganados para min o max.
Consideremos ahora la primera etapa del gato (figura 4). Supongamos que la
búsqueda se realiza usando una estrategia dfs y que cada vez que una hoja es
generada su se computa su evaluación. Supongamos, además, que también se
calculan las evaluaciones para los nodos no-hoja, en cuanto es posible.
Al calcular el valor para el nodo A, sabemos que el valor del nodo inicial (Start
Jorge Baier Aranda, PUC
9
Node, en la figura) está acotado inferiormente por −1. A este valor se le conoce
como valor alfa.
El valor alfa de un nodo MAX es la cota inferior del valor de utilidad que se
conoce hasta el momento.
Si durante el cálculo del valor MAX de un nodo sólo se conoce el valor de la
utilidad de un subconjunto h de sus hijos, entonces el valor alfa corresponde a la
máxima utilidad que estos poseen.
Volviendo al ejemplo ¿Qué pasa si estamos explorando el nodo C y ya sabemos
que el valor para A es −1?
La respuesta es que no necesitamos seguir evaluando ningún sucesor de B pues,
a lo más, B tendrá utilidad −1.
Al calcular el valor de C sabemos que B tiene un lı́mite superior de −1. A este
valor se le conoce por valor beta.
El valor beta de un nodo MIN es la cota inferior de la utilidad que se conoce
hasta el momento.
Notemos que:
Jorge Baier Aranda, PUC
10
• Los valores alfa de los nodos max nunca pueden decrecer.
• Los valores beta de los nodos min nunca pueden crecer.
Dada estas restricciones podemos establecer las siguientes reglas para el podado
del árbol de búsqueda:
• La búsqueda es abandonada bajo todo nodo min que tiene un valor beta menor
o igual al valor alfa de alguno de sus antecesores max.
• La búsqueda es abandonada bajo todo nodo max que tiene un valor alfa mayor
o igual al valor beta de alguno de sus antecesores min.
Durante la búsqueda, los valores alfa y beta se computan de la siguiente manera:
• El valor alfa de un nodo max es igual al mayor valor calculado en sus sucesores.
• El valor beta de un nodo min es el menor valor calculado en sus sucesores.
La figura 5 muestra los valores alfa-beta de los nodos justo después de producir
el corte en el arco que une al nodo C con el nodo I.
En la misma figura, el algoritmo efectúa un corte en el arco que une a K con Y .
Jorge Baier Aranda, PUC
11
Figura 4: Primera etapa de la búsqueda del gato
Jorge Baier Aranda, PUC
12
A
B
E
L
(2)
C
beta=3
F
M
(3)
N
(8)
G
O
(5)
P
(7)
alfa=3
H
Q
(6)
R
(0)
D
beta=1
I
S
(1)
T
(5)
J
U
(2)
V
(8)
K
W
(4)
X
Y
(10) (2)
Figura 5: Poda alfa-beta antes de revisar el nodo D.
Jorge Baier Aranda, PUC
13
Alfa-Beta en pseudo código
Si P es la profundidad máxima a la que se quiere llegar, entonces llamando a
AB(s, −∞, +∞, 0, P ) se obtiene el recorrido del árbol con poda alfa-beta.
AB(nodo, α, β, prof, limite)
1 if prof = limite
2
then return Ut(nodo)
3 for each ni ∈ {n1, n2, . . . , nk } = Sucesores(nodo)
4 do if prof mód 2 = 0
5
then α ← máx{α; AB(ni, α, β, prof + 1, P )}
6
if α ≥ β
7
then return β
8
if i = k
9
then return α
10
else β ← mı́n{β; AB(ni, α, β, prof + 1, P )}
11
if β ≤ α
12
then return α
13
if i = k
14
then return β
Jorge Baier Aranda, PUC
14
Eficiencia de Alfa-Beta
Supongamos que el árbol tiene profundidad d y cada nodo (excepto los nodos
hoja) tienen exactamente b sucesores. Si no realizamos poda alfa-beta, deberemos
revisar bd nodos hoja.
La eficiencia de la poda dependerá obviamente del orden en que se generan los
nodos.
¿Cuál es el mejor caso?
¿Y el peor?
Es posible demostrar que en el caso promedio, alfa-beta permite aumentar
aproximadamente a 43 d la profundidad de la búsqueda revisando la misma cantidad
de nodos que sin poda.
Jorge Baier Aranda, PUC
15
Predicción en Múltiples Etapas
Supongamos que queremos construir un algoritmo que prediga la temperatura
del dı́a domingo. Este algoritmo recibirá el dı́a de la semana y las observaciones
meteorólogicas de éste.
Supongamos que x1, x2, . . ., x5, x6 son vectores que codifican el dı́a y las
observaciones meteorológicas hechas el lunes, martes, . . ., sábado.
Lo que queremos es encontrar una función F que dado un vector de “descripción
diaria” entregue una temperatura.
Para diseñar la estrategia de aprendizaje es conveniente notar que:
• Los datos de la serie se conocen siempre en el mismo orden.
• La temperatura del domingo se conoce al final de la serie.
Generalicemos el problema para una serie de n datos (x1, . . . , xn) donde se
produce un resultado esperado z.
Jorge Baier Aranda, PUC
16
Si enfrentamos el problema usando aprendizaje supervisado, deberemos alimentar
al algoritmo de aprendizaje con los datos (x1, z), (x2, x), . . . , (xn, z).
Supongamos que F es una función que calcula la salida de una red neuronal.
En ese caso, el problema se reduce a actualizar los pesos de ésta, para cada
ejemplo, usando la siguiente fórmula:
w←w+
m
X
∆wt
(1)
t=1
donde ∆wt está dado por:
∆wt = α(z − F (xt, w))∇w F (xt, w)
Jorge Baier Aranda, PUC
17
Usando diferencias temporales
El método de diferencias temporales es una variación del enfoque de aprendizaje
supervisado.
La idea considera que la diferencia entre las distintas predicciones debe ayudar
a tener un mejor aprendizaje.
Esto se puede lograr definiendo
dt = F (xt+1, w) − F (xt, w)
y notando que
z − F (xt, w)) =
m
X
(F (xk+1, w) − F (xk , w)),
con z = F (xm+1, w)
k=t
Jorge Baier Aranda, PUC
18
Ası́, es posible reescribir la ecuación de la siguiente manera:
∆wt = w +
=w+
m
X
t=1
m
X
α(z − F (xt, w))∇w F (xt, w)
α∇w F (xt, w)
t=1
m
X
dk
k=t
El aprendizaje ahora depende de las diferencias entre las predicciones para los
elementos de la serie. Sin embargo, es equivalente al aprendizaje reforzado.
La familia de algoritmos de aprendizaje T D(λ) usan la siguiente fórmula para la
actualización de los pesos:
w=w+
m
X
t=1
α∇w F (xt, w)
m
X
λk−tdk ,
k=t
con 0 ≤ λ ≤ 1.
Empı́ricamente se ha visto que T D(λ) tiene mejores resultados que la técnica de
aprendizaje reforzado pura.
Jorge Baier Aranda, PUC
19
Aprendiendo a Jugar con Diferencias Temporales
Si se utiliza una estrategia minimax, una buena función de evaluación perfecta
(digamos, J(·)) es aquella que entrega, con exactitud, la utilidad de cada nodo, es
decir, el valor que tendrı́a si pudiéramos expandir el árbol hasta lo más profundo
posible.
Queremos tener un método para encontrar la función J(·). En general, en los
juegos de tablero, cuando esta función es conocida, es simplemente una tabla
que, dada una posición, retorna -1, 0 o 1.
˜ w), que
Realmente, nos interesa encontrar una estimación de J, digamos J(t,
dado un tablero t y un vector de parámetros w, retorne una estimación para J(t).
˜ w) como un problema de aprendizaje
¿Se puede ver el problema de aprender J(t,
de múltiples etapas?
Bajo algunos supuestos acerca del contrincante, la respuesta es sı́.
La razón es que en general podremos observar una serie x1, . . . , xn que corresponde a los distintos tableros que se generan durante el juego en donde MAX
Jorge Baier Aranda, PUC
20
puede jugar, y, finalmente, tendremos un resultado (1,0 o -1).
˜ n+1, w) es el
Ası́, para una secuencia de tableros x1, . . . , xn, xn+1 (donde J(x
resultado final del juego), podemos aplicar una fórmula del siguiente estilo para
actualizar w:
n
n
X
X
˜ t, w)
w=w+
α∇w J(x
λk−tdk
t=1
k=t
Sin embargo, si MAX juega usando la estrategia minimax, es más conveniente
que la estrategia tome eso en cuenta.
Para ello, se inventó el algoritmo TDLeaf(λ) que modifica la estimación de las
hojas de un árbol minimax.
Jorge Baier Aranda, PUC
21
El algoritmo TDLeaf(λ)
En el algoritmo minimax, la evaluación asignada a la raı́z corresponde al valor que
tiene la hoja de una rama óptima, es decir la rama que tiene la mejor secuencia
de movidas para MAX.
La idea en TDLeaf es modificar J˜ pensando en el valor asignado a la hoja que
da el valor al nodo raı́z, y no en el valor del nodo raı́z.
El algoritmo se resume de la siguiente manera:
Sean x1, . . . , xn−1 los tableros donde MAX pudo jugar y xn el tablero final (r(xn)
˜ n, w) ← r(xn).
es el resultado del juego). Diremos, por simplicidad que J(x
1. Para cada estado xi, hacer xli igual a la hoja del árbol minimax que sirve para
computar el valor minimax de xi.
2. Para cada t ∈ 1..n − 1 computar
˜ lt+1, w) − J(x
˜ lt, w)
dt ← J(x
Jorge Baier Aranda, PUC
22
3. Actualizar w de acuerdo a la formula:
w ←w+α
n−1
X
t=1
˜ lt, w)
∇J(x
n−1
X
λj−tdt.
j=t
Se ha comprobado que TDLeaf ha tenido excelentes resultados para entrenar
jugadores de ajedrez.
Jorge Baier Aranda, PUC
23