Tema: Lenguaje ensamblador embebido
Anuncio

Compiladores. Guía 10
1
Facultad:
Ingeniería
Escuela:
Computación
Asignatura: Compiladores
Tema: Lenguaje ensamblador embebido
Contenido
En esta guía se presenta una breve introducción a las
estructuras básicas de lenguaje ensamblador embebidas en
lenguaje C++. Estas pueden ser interpretadas y ejecutadas
perfectamente por el compilador Dev C++ que se ocupara en la
práctica. Se pretende que sea una herramienta más para
construir un generador de código.
Objetivos Específicos
Reconocer
las
diferentes
instrucciones
para
la
generación de código ensamblador.
Realizar segmentos de código a través de ejemplos de ASM
embebidos en C++.
Material y Equipo
Guía de Laboratorio Nº 10.
Computadora con DevC++
Introducción Teórica
El lenguaje ensamblador que se utiliza para traducir
Guía 3 al código de máquina. Cada microprocesador o micro
programas
controlador tiene su propio lenguaje ensamblador con su
particular
conjunto de instrucciones y sus varios modos de
Guía 4
direccionamiento
que
dependen
de
la
arquitectura
del
hardware, cada nuevo procesador de INTEL que sale al mercado,
fíafabricante agrega algunas instrucciones a su conjunto de
el
instrucciones, pero siempre conservan las instrucciones y
registros
de
los
modelos
anteriores
por
razones
de
compatibilidad.
2
Compiladores. Guía 10
Registros del procesador
Los primeros procesadores proveían registros de 16 bits AX,
BX, CX, DX, SI, DI, BP, SP, CS, DS, SS, ES, IP, y FLAGS. El
procesador soportaba hasta 1Mb de memoria y solo podía operar
en modo Real. En este modo el programa podía acceder a
cualquier dirección de memoria, incluso a direcciones
utilizadas
por
otros
programas.
Sus
cuatro
registros
principales, AX, BX, CX, y DX están divididos en dos
registros de 8 bits cada uno.
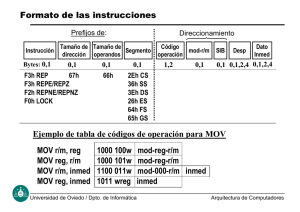
En la Fig. 1 se puede observar el registro AX que posee una
parte que contiene los primeros 8 bits denominada AH (high) y
una parte que contiene los últimos 8 bits denominada AL
(low), y así sucesivamente con cada uno de los registros
mencionados.
Este tipo de registros se usa especialmente en operaciones
aritméticas, ya que nos permite manejarnos con comodidad
cuando trabajamos con datos que no superan un byte, pero se
debe tener cuidado ya que AH y AL no son independientes de
AX, o sea que si hacemos algún movimiento de datos
referenciando a AX, también estamos cambiando los valores de
AH y AL.
Los registros SI y DI son utilizados generalmente como
punteros.
Los registros BP y SP se conocen como los punteros de pila.
Se utilizan para moverse dentro de la pila.
CS, DS, SS, y ES son los segments registers. Son los
encargados de direccionar las distintas partes de cada
programa:
CS para el code segment, donde se guardan los datos del
código de máquina de las instrucciones que constituyen
el programa.
Compiladores. Guía 10 3
DS para el data segment, que guarda los datos que el
programa debe operar y los resultados de la ejecución
del mismo.
SS para el stack segment, Almacena datos y direcciones
necesarias durante la ejecución de cada parte del
programa y que es localizada dentro del segmento
mediante el registro SP (stack pointer).
ES para el extra segment, utilizado para guardar datos
tipo strings, también como prolongación del DS (data
segment), y como registro temporal. Cada dato es
apuntado dentro del segmento por el registro puntero DI.
El registro IP es utilizado para mantener una pista de la
dirección de la próxima instrucción a ejecutarse por el
procesador. Normalmente cuando se ejecuta una instrucción, IP
se adelanta a apuntar a la próxima instrucción en memoria.
El FLAGS es un registro de 16 bits que se divide en 16 partes
de 1 bit. Cada uno de estos bits guarda información
importante sobre el resultado de la instrucción anterior.
Este resultado se guarda con un solo un bit que puede ser 1 ó
0. Por ejemplo, el bit Z es 1 si el resultado de la
instrucción anterior fue 0, y es 0 si el resultado fue 1. El
bit C será 1 si la última operación produjo acarreo, y 0 si
no lo hizo.
A partir del procesador 80386 se produce un salto en el
diseño. Extendiendo la mayoría de sus registros a 32 bits y
renombrándolos como EAX, EBX, ECX, EDX, ESI, EDI, EBP, ESP,
EIP y agregan también dos registros nuevos de 16 bits
denominados FS y GS. Para guardar compatibilidad con los
diseños anteriores se conviene de que al hacer referencia a
AX, se hace referencia a los últimos 16 bits de EAX (lo mismo
que era AL de AX); pero no se puede tener acceso directo a
los primeros 16 bits de EAX.
Instrucciones de lenguaje ensamblador:
Instrucción MOV:
La función de la instrucción MOV, es como su nombre da a
entender, "mover" un valor.
Por ejemplo: MOV AX,BX
Esta instrucción copia el contenido de BX en AX, conservando
el valor de BX.
Otro ejemplo:
MOV AX,2000
MOV [A100],AX
4
Compiladores. Guía 10
En este caso introducimos el valor 2000 en AX, y luego lo
llevamos a la dirección de memoria A100.
Con la instrucción
operaciones:
MOV
se
puede
realizar
las
siguientes
Instrucciones INC y DEC:
Son las más básicas a la hora de hacer operaciones con
registros:
INC, incrementa el valor de un registro o de cualquier
posición de memoria en una unidad.
DEC, lo decrementa un registro en el mismo valor.
Ejemplos:
INC AX
DEC AX
Incrementa en una unidad el valor de AX y lo decrementa, por
lo que no ha cambiado su valor. Estas dos instrucciones nos
van a servir mucho en el uso de contadores en los bucles. Son
equivalentes a ++ y -- del lenguaje C/C++.
Instrucciones ADD y SUB:
Se trata de dos operadores que contienen todos los lenguajes
de programación: la suma y la resta. Tienen dos operandos,
uno de destino y otra fuente. Para la suma, se suman los dos
operandos y se almacena el resultado en el primero (destino).
Para la resta, se le resta al primero el segundo, y se
almacena el resultado en el primero (destino).
Ejemplos:
ADD AX,BX ;Suma a AX con BX, y lo guarda en AX. (AX+BX) -> AX
ADD AX,[SI] ;Se suman AX y el contenido de lo que esta
apuntado por SI y se almacena en AX.
ADD AX,3 ;Suma 3 a AX y lo almacena en AX. (AX+3) -> AX
SUB AX,AX ;Resta AX de AX. Se utiliza para poner a AX en 0.
SUB CX,DX ;Se resta el valor de CX con DX y se almacena en
CX.
SUB CX,20 ;Se resta de CX el valor 20, y queda en CX el
resultado.
Compiladores. Guía 10 5
Nota: el uso de la “;” es para hacer comentarios.
Procedimiento
Desarrolle el siguiente programa
Guía 3
embebido:
#include <cstdlib>
#include
Guía 4 <iostream>
using namespace std;
int a;
fía b;
int
main()
{
asm("movl $9, %eax");
asm("subl $4, %eax");
asm("movl %eax, _a");
printf("a = %d\n", a);
asm("movl $3, %eax");
asm("addl $9, %eax");
asm("movl %eax, _b");
printf("b = %d\n", b);
system("PAUSE");
return 0;
}
de
C++
con
ensamblador
Debe notar que las variables globales a y b declaradas dentro
del código ensamblador se denotan como _a y _b.
Ejecute el programa siguiente, observe el resultado
justifique la forma de implementar código embebido:
#include <cstdlib>
#include <iostream>
using namespace std;
int a=3;
int b=9;
main()
{
asm("movl _b, %eax");
asm("subl _a, %eax");
asm("movl %eax, _a");
printf("a = %d\n", a);
asm("movl _b, %eax");
y
6
Compiladores. Guía 10
asm("addl _a, %eax");
asm("movl %eax, _b");
printf("b = %d\n", b);
system("PAUSE");
return 0;
}
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
Ejecute también el programa siguiente, observe el resultado y
justifique la forma de implementar código embebido:
#include <cstdlib>
#include <iostream>
using namespace std;
int a=3;
int b=9;
main()
{
asm("movl _a, %eax");
asm("movl _b, %ebx");
asm("mul %ebx");
asm("mov %eax, _a");
printf(" %d\n", a);
system("PAUSE");
return 0;
}
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
Compiladores. Guía 10 7
Análisis de resultados
Explique, Como se puede hacer mejoras al programa siguiente:
#include <cstdlib>
#include <iostream>
using namespace std;
int a=3;
int b=20;
int c=7;
int d=1;
int e=0;
main()
{
asm("movl _a, %eax");
asm("add _b, %eax");
asm("add _c, %eax");
asm("add _d, %eax");
asm("movl $4, %ecx");
asm("cltd");
asm("divl %ecx");
asm("mov %eax, _c");
asm("movl %edx, _e");
printf(" %d\n", c);
printf(" %d\n", e);
system("PAUSE");
return 0;
}
8
Compiladores. Guía 10
Investigación complementaria
Se pide los programas que generen código ensamblador
para:
1. sentencias condicionales
if (i 2 j > 7) {
<Bloque A>
else {
<Bloque B>
}
<Bloque C>
2. sentencias repetitivas for
for (inicial; condicion; incremento) {
<cuerpo de for>
}
3. sentencias repetitivas while.
while (inicial) {
<cuerpo de while>
}
4. funciones
Investigar:
o Que es un interprete
o Cuál es la función principal
o Como funciona
o Que resultado genera
o Convenciones léxicas de ENSAMPOCO/3
o Ejemplo de ENSAMPOCO/3
Bibliografía
http://www.gui.uva.es/udigital/
http://repositori.uji.es/xmlui/bitstream/handle/10234/59
16/codigo.apun.pdf?sequence=1
Compiladores. Guía 10 9
Guía
10:
Embebido
Lenguaje
Hoja de cotejo:
Ensamblador
Docente:
Tema: Presentación
del programa
Alumno
:
10
1
Máquina No:
Máquina No:
Máquina No:
GL:
Alumno:
Docente:
GL:
Docente:
GL:
Fecha:
a
EVALUACION
%
CONOCIMIENTO
Del 20
al 30%
APLICACIÓN
DEL
CONOCIMIENTO
Del 40%
al 60%
1-4
5-7
8-10
Conocimie
nto
deficient
e de los
fundament
os
teóricos
Conocimiento
y explicación
incompleta de
los
fundamentos
teóricos
Conocimiento
completo y
explicación
clara de los
fundamentos
teóricos
No tiene
actitud
proactiva
.
Actitud
propositiva y
con
propuestas no
aplicables al
contenido de
la guía.
Tiene actitud
proactiva y sus
propuestas son
concretas.
ACTITUD
Del 15%
al 30%
TOTAL
100%
Nota