2.- Descripción del sistema.
Para mover y posicionar el domo, desde la interfaz de
usuario se hace uso de un programa denominado “interfaz
gráfica del domo” y un módulo “control de movimiento y
posicionado del domo”, los cuales se describen en detalle más
adelante.
2.1 Módulo de control de movimiento y posicionado
del domo.
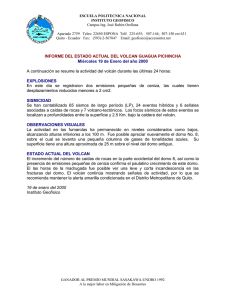
Como se puede apreciar en la figura 1, el módulo de
control de movimiento y posicionado, está compuesto por una
computadora con su electrónica asociada, un manejador de
potencia para motores de corriente directa, un codificador de
posición absoluta y relevadores que proporcionan la energía al
motor que hace girar el domo en cualquier dirección.
El módulo de control cuenta con una entrada para recibir
las señales de posición del codificador absoluto, otra para
comunicación serie RS-232 y una más para mover el domo a la
izquierda o la derecha (paleta), [apéndice A]..
El módulo de control cuenta con una computadora que
está basada en un microcontrolador compatible con la familia
8051 de Intel. La computadora recibe y trasmite a través de
puerto serie RS-232 donde la configuración del puerto es:
9600,8, N, 1.
El manejador de motores de potencia, modelo 125D, es
de la empresa estadounidense DART CONTROLS. A este
manejador se le pueden conectar motores de corriente directa
desde 1/50 hasta 2 caballos de fuerza, [apéndice B].
El codificador de posición absoluta está acoplado al domo a
través de un mecanismo de engranes. Una revolución del domo
equivale a una vuelta en el codificador, y una vuelta en el
vástago del codificador equivale a 360 grados. Este codificador
tiene una resolución de medio grado.
Módulo de control
Manejador
de potencia
Interfaz gráfica
Computado
ra dedicada
Paleta (Izq. Der.)
Relevadores
Codificador
absoluto
Motor
Domo
Figura 1. - Diagrama a bloques del módulo de control de
movimiento y posicionado del domo.
Cuando se enciende el módulo de control, la
computadora realiza una verificación del sistema, deshabilita el
movimiento del domo; para evitar que éste gire a la deriva, y
se queda en un lazo en espera de instrucciones de la interfaz
gráfica del domo.
Cuando la computadora recibe instrucciones, las procesa
para determinar que hacer, y posteriormente ejecuta la
instrucción. Si la instrucción es posicionar el domo a un ángulo
dado, la computadora lee el codificador para conocer la
ubicación del domo y determinar si es necesario moverlo, si es
así, calcula la trayectoria más corta y lo pone a girar.
Una vez que se ha puesto en movimiento el domo, la
computadora lee continuamente su posición. Si ésta no cambia
el valor, entonces, se suspende el giro y avisa a la interfaz
gráfica del domo que hay un error y que detuvo el movimiento.
Si la posición que proporciona el codificador, está
cambiando, entonces continúa el giro hasta que el domo
alcanza la posición a la que fue enviado.
2.2 Interfaz gráfica del domo.
La interfaz del usuario utilizada con el control de posición
del domo del telescopio de 1.5 m. es muy sencilla.
Consta de un botón de selección de guiado, un
despliegue numérico de 3 dígitos donde se despliega la posición
actual del domo y, dos botones con sendas; flechas a la
derecha e izquierda que mueven el domo en el sentido
indicado. El movimiento del domo con los botones de flecha se
interrumpe al "soltar" el botón, es decir, el movimiento es
continuo mientras se mantiene presionado el botón.
Para activar el seguimiento automático del domo al
telescopio se selecciona el botón de guiado. Para desactivar el
seguimiento automático se selecciona nuevamente el botón de
guiado.
Para mover el domo a una posición dada, se usa una
ventana de edición que aparece al dar un "click" sobre el
despliegue de la posición del domo. En dicha ventana aparece
un campo de edición donde se debe teclear el valor de la
posición deseada. Para ejecutar la orden de movimiento debe
darse un "click" sobre el botón de "MOVER" que aparece en la
ventana de edición, al dar el "click" sobre "MOVER"
automáticamente se cierra la ventana de edición.
2.3 Instrucciones del módulo de control del domo.
El movimiento del domo es controlado por una
computadora dedicada, basada en un microcontrolador
compatible con la familia 8051 de Intel. Este controlador recibe
instrucciones a través de un puerto serie RS232. La
configuración del puerto serie es: 9600 bauds, 8 bits por
carácter, sin bit de paridad y un bit de paro (abreviando
9600,8,N,1).
Las instrucciones constan de una serie de caracteres
"ascii". Todas las instrucciones empiezan con dos puntos y
terminan con un punto y coma. Las instrucciones del
controlador se describen a continuación, (la sintaxis de las
instrucciones se escribe en itálicas).
:P; Regresa la posición del domo y la bandera de estado.
La cadena está definida como sigue: ":HHH H;". Los primeros 3
caracteres después de los dos puntos definen la posición del
domo en hexadecimal (0 a 360 grados). Después del espacio
viene la bandera de error.
La bandera de error significa:
0-Estado normal.
1-Error.
2-Error no se mueve el domo.
:S; Cancela la operación actual o el movimiento en
proceso. Además, pone en cero la bandera de error.
:J+; Mueve el domo a la derecha hasta recibir el mando
de cancelar el movimiento.
:J-; Mueve el domo a la izquierda hasta recibir el mando
de cancelar el movimiento.
:MHHH; Mueve el domo a la posición absoluta dada por
el número HHH en hexadecimal. El bit más significativo en 1
indica movimiento a la derecha y, en cero a la izquierda.
:THH; Cambia los parámetros de zona muerta y retardo
en la verificación del movimiento del domo. El primer "nibble"
indica la zona muerta en cuentas. El segundo "nibble" indica el
valor del retardo de la verificación del movimiento en décimas
de segundo. Este valor es el tiempo de retardo antes de que el
control señale un error si no cambia el valor leído del
codificador absoluto.
2.4 Comunicación entre la interfaz de usuario del
domo y otros programas.
La I. U. (INTERFAZ DE USUARIO), del domo acepta una
serie de instrucciones por medio de un "socket" con nombre. El
nombre del "socket" es "/tmp/domo.sock".
Se puede usar el programa de utilería llamado
"cliente\_nom\_sock" para mandar instrucciones en línea a la I.
U. por ejemplo:
cliente\_nom\_sock
/tmp/domo.sock "DAME-POSDOMO" debe regresar en una ventana de instrucciones (shell)
la posición actual del domo. Otro ejemplo es:
cliente\_nom\_sock /tmp/domo.sock "MUEVE-DOMO=10" debe
mover el domo a la posición absoluta de 10 grados. Las
instrucciones que recibe la I. U. a través del socket se
describen en la siguiente sección.
2.5 Instrucciones del socket interfaz del domo.
Las instrucciones que interpreta la I.U. son cadenas de
caracteres "ascii" y, se describen a continuación.
DAME-POS-DOMO
Regresa la posición actual del domo. La cadena de
respuesta está formada de la siguiente manera,
DOMO=n, donde n es un número entero con la posición
actual en grados.
MUEVE-DOMO=n
Mueve el domo a la posición n. El número "n" es un
entero entre 0 y 359 grados.
Ejemplo - MUEVE-DOMO=100
PON-GUIADO
Activa el movimiento del domo en guiado automático.
QUITA-GUIADO
Desactiva el
automático.
movimiento
del
domo,
en
guiado
PRE-GUIADO= n
Mueve el domo a la posición n, El número "n" es un
entero entre 0 y 359 grados. Al término del
movimiento se activa el guiado automático.
NOTA - Las instrucciones se deben dar como aparecen, es
decir, en letras mayúsculas.
Las instrucciones se deben dar de una en una, es decir, si
se desea desactivar el guiado y mover el domo a una posición
dada, es recomendable hacerlo por separado, por ejemplo
usando la utilería cliente\_nom\_sock:
cliente\_nom\_sock /tmp/domo.sock "QUITA-GUIADO"
cliente\_nom\_sock /tmp/domo.sock "MUEVE-DOMO=10"
De no hacerlo es probable que el orden de ejecución de
las instrucciones no produzca el resultado esperado.
3.- Instalación del módulo de control de movimiento y
posicionado del domo en el telescopio.
El modulo de control es autónomo y solo basta conectarlo
y encenderlo.
Conecte el motor, el codificador absoluto y coloque el
engrande éste en la cremallera del domo, y por último conecte
el puerto serie y alimentación.
Presione el botón de giro del domo a la derecha y
verifique que el que efectivamente el domo gire en este
sentido, de no ser así, intercambie los cables del motor y
verifique que ahora si el movimiento es en el sentido correcto.
Para que el control posicione adecuadamente el domo, es
necesario poner la ventana del domo centrada al norte, esto es
porque ahí se fija la posición cero del domo. Antes de instalar
el codificador en la cremallera, es necesario, ponerlo en cero;
ejecute el programa de la interfaz gráfica y abra la ventana de
la posición del domo, gire el vástago del codificador hasta que
se observe cero en la interfaz de usuario. Después inserte el
engrane del codificador en la cremallera.
De no poner la ventana del domo centrada al norte y el
codificador en cero, cuando se mande a mover el domo este
quedará en una posición impredecible.
Si se desea se puede conectar una terminal al puerto serie
RS-232 del control del domo, en el piso de telescopio y utilizar
los mandos descritos en la sección 2.3 “Instrucciones del
control del domo”.
Se recomienda verificar cada 6 meses que la ventana del
domo esté centrada al norte y que el codificador indique cero,
de no ser así, realice los ajustes necesarios.
4. - Pruebas del módulo de control de movimiento y
posicionado del domo en el telescopio.
Módulo de control
Manejador
de potencia
Interfaz gráfica
Computadora
dedicada
Paleta (Izq. Der.)
Relevadores
Codificador
absoluto
Motor
Domo
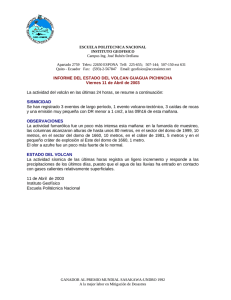
Para evaluar el desempeño del módulo de control, conecte una
terminal en windows al puerto serie de este módulo, (donde
conecta la interfaz gráfica, ver figura arriba), con la siguiente
configuración: 9600,8, N, 1..
Encienda el módulo de control y desde la terminal envíe los
siguientes mandos.
:P;
Este mando regresa la posición del domo y la bandera de
estado. La cadena está definida como sigue: ":HHH H;". Los
primeros 3 caracteres después de los dos puntos definen la
posición del domo en hexadecimal (0 a 360 grados). Después
del espacio viene la bandera de error.
La bandera de error significa:
0-Estado normal.
1-Error.
2-Error no se mueve el domo.
:S;
Cancela la operación actual o el movimiento en proceso.
Además, pone en cero la bandera de error.
Envíe :J+; el domo se moverá a la derecha, una vez que esté
el domo en movimiento envíe el mando solicitar la posición :P;
varias veces y verifique que las cuentas aumenten.
Hacer la misma prueba con :J-;
:J-;
Mueve el domo a la izquierda hasta recibir el mando de
cancelar el movimiento.
Para mandar el telescopio a diferentes posiciones
siguiente mando.
dar el
:MHHH;
Mueve el domo a la posición absoluta dada por el número HHH
en hexadecimal (0 a 360grados). El bit más significativo en 1
indica movimiento a la derecha y, en cero a la izquierda.
Ejemplo:
:105A; envía el domo a la posición correspondiente al ángulo
90.
Cuando el domo este girando se puede solicitar la posición,
continuamente, para ver si no hay ningún problema en el
desempeño del movimiento.
Mande el domo a una posición cuantas veces lo crea necesario.
Si el movimiento y posicionado está bien, entonces habrá que
buscar para la sección de la PC donde está la interfaz gráfica.
Si el problema se detecta en el módulo de control, entonces:
a). - Hay que ver que las señales de RS-232 están
llegado bien al pin del microprocesador (ver diagrama
eléctrico).
b). - Ver que los niveles de voltaje de los bits del
codificador estén bien.
c). – Ver que el domo no esté atorado y si se siente que
presenta mayor fricción en algunos puntos, entonces aumentar
la torca girando un potenciómetro del manejador que controla
al motor. Se anexa la información técnica completa del
manejador.
Pudiera suceder, también, que el pin del mciro esté
dañado en la parte interna de éste y que aleatoria mente el
micro no reciba la información del RS232, en ese caso habrá
que cambiar el microprocesador.
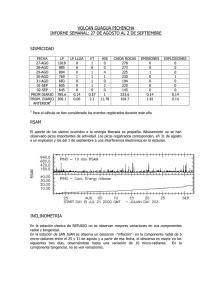
Mascarilla en impreso, lado soldadura, del diagrama eléctrico del
módulo de control de movimiento y posicionado del domo.
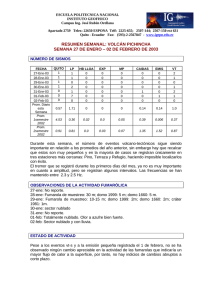
Mascarilla en impreso, lado componentes, del diagrama eléctrico
del módulo de control de movimiento y posicionado del domo.
Mascarilla en impreso, distribución de componentes, del diagrama
eléctrico del módulo de control de movimiento y posicionado del domo.
 0
0