Mecánica Cásica
Anuncio

Contenido
1. Transformaciones canónicas
1.1 Definición de transformaciones canónicas y función generatriz
1.2 Enfoque simpléctico y transformaciones infinitesimales
1.3 Corchetes de Poisson y de Lagrange e invariantes canónicos
1.4 Teoremas de Liouville y Noether
1
Omar De la Peña-Seaman | IFUAP
Mecánica Clásica − M.C. Física
/43
1/43
Def. de transformaciones canónicas y función generatriz
Transformaciones puntuales
El objetivo de transformar el sistema de coordenadas en que trabajamos
en un problema en particular es simplificar la expresión y solución del
mismo,
Qi = Qi (q, t),
lo anterior se conoce como una tranformación puntual en el espacio
de configuración.
En el formalismo Hamiltoniano, donde tenemos 2n q’s y p’s independientes, necesitamos,
Qi = Qi (q, p, t),
Pi = Pi (q, p, t),
siendo ahora la tranformación puntual definida en el espacio fase.
Además, el set (Q, P ) deben ser coordenadas canónicas ∴
Q̇i =
∂K
,
∂Pi
Ṗi = −
∂K
.
∂Qi
en donde K representa al Hamiltoniano transformado.
Omar De la Peña-Seaman | IFUAP
Mecánica Clásica − M.C. Física
2
/43
2/43
Def. de transformaciones canónicas y función generatriz
Transformaciones canónicas
Para que las (Q, P ) sean consideradas coordenadas canónicas, deben
cumplir con el principio modificado de Hamilton,
δ
Z t2 Pi Q̇i − K(Q, P, t) dt = 0
t1
en donde las coordenadas originales (q, p) cumplen con el principio,
Z t2
δ
(pi q̇i − H(q, p, t)) dt = 0
t1
Para que el principio de Hamilton modificado se cumpla en ambos
esquemas, los integrandos deben ser conectados mediante la relación,
dF
, ∀ F = F (q, p, t), ó F = F (Q, P, t).1
dt
conocida como tranformación canónica y F la función generatriz.
pi q̇i − H = Pi Q̇i − K +
1
o una mezcla de las coordenadas de los espacios fase.
Omar De la Peña-Seaman | IFUAP
Mecánica Clásica − M.C. Física
3
/43
3/43
Def. de transformaciones canónicas y función generatriz
Transformaciones canónicas
La función de F es actuar como un link entre los sist. (q, p) y Q, P ,
por tanto, analizemos cuando
F = F1 (q, Q, t),
aplicando a la transf. canónica con esta función generatriz,
∂F1
∂t
∂F1 ∂F1
∂F1
= Pi Q̇i − K +
+
q̇i +
Q̇i
∂t
∂qi
∂Qi
∂F1
∂F1
∂F1
∴ 0 =
−pi +
q̇i + Pi +
Q̇i + H − K +
∂qi
∂Qi
∂t
pi q̇i − H = Pi Q̇i − K +
como las coords. qi y Qi son independientes, ⇒
pi =
∂F1
∂F1
∂F1
, Pi = −
, K=H+
.
∂qi
∂Qi
∂t
4
Omar De la Peña-Seaman | IFUAP
Mecánica Clásica − M.C. Física
/43
4/43
Def. de transformaciones canónicas y función generatriz
Transformaciones canónicas
Se puede dar el caso de que pi no pueda ser expresada como pi (q, Q, t),
si no más bien como pi (q, P, t), por tanto necesitamos una función
generatriz F = F (q, P, t),
F = F2 (q, P, t) − Qi Pi
sustituyendo en la transformación canónica,
dF
pi q˙i − H = Pi Q̇i − K +
dt
dF2
= Pi Q̇i − K +
− Q̇i Pi − Qi Ṗi
dt
∂F2 ∂F2
∂F2
= −K +
+
q̇i +
Ṗi − Qi Ṗi
∂t
∂qi
∂Pi
∂F2
∂F2
∂F2
∴ 0 =
−pi +
q̇i + −Qi +
Ṗi + H − K +
∂qi
∂Pi
∂t
⇒ pi =
Omar De la Peña-Seaman | IFUAP
∂F2
∂F2
∂F2
.
, Qi =
, K=H+
∂qi
∂Pi
∂t
Mecánica Clásica − M.C. Física
5
/43
5/43
Def. de transformaciones canónicas y función generatriz
Tipos de transformaciones canónicas
Las otras transformaciones básicas serán, F = F (p, Q, t) y F =
F (p, P, t), las cuales vienen dadas de la siguiente manera, junto con
las ya obtenidas,
Transformaciones canónicas básicas
Función generatriz
F = F1 (q, Q, t)
F = F2 (q, P, t) − Qi Pi
F = F3 (p, Q, t) + qi pi
F = F4 (p, P, t) + qi pi − Qi Pi
Derivativas
pi = ∂F1 /∂qi
Pi = −∂F1 /∂Qi
pi = ∂F2 /∂qi
Qi = ∂F2 /∂Pi
qi = −∂F3 /∂pi Pi = −∂F3 /∂Qi
qi = −∂F4 /∂pi Qi = ∂F4 /∂Pi
6
Omar De la Peña-Seaman | IFUAP
Mecánica Clásica − M.C. Física
/43
6/43
Def. de transformaciones canónicas y función generatriz
Tipos de transformaciones canónicas
Finalmente, cabe mencionar que una función generatriz no tiene por
que ser una de las básicas anteriores para todos los grados de libertad
del sistema, por ejemplo,
F 0 (q1 , p2 , P1 , Q2 , t),
en donde,
F = F 0 (q1 , p2 , P1 , Q2 , t) − Q1 P1 + q2 p2 ,
dando como resultado las siguientes relaciones para las ecuaciones de
transformación,
∂F 0
,
∂q1
∂F 0
q2 = −
,
∂p2
p1 =
∂F 0
,
∂P1
∂F 0
P2 = −
,
∂Q2
Q1 =
K=H+
∂F 0
.
∂t
7
Omar De la Peña-Seaman | IFUAP
Mecánica Clásica − M.C. Física
/43
7/43
Def. de transformaciones canónicas y función generatriz
Ejemplo: oscilador armónico
Consideremos el oscilador armónico en una dimensión,
H=
kq 2
1 2
k
p2
+
=
(p + m2 ω 2 q 2 ), ∀
= ω2.
2m
2
2m
m
si pudieramos encontrar una transformación caónica de la siguiente
forma,
f (P )
p = f (P )Cos Q, q =
Sen Q,
mω
⇒ podríamos expresar al Hamiltoniano de la siguiente manera,
K=H=
f 2 (P ) f 2 (P )
Cos2 Q + Sen2 Q =
,
2m
2m
de tal manera que Q sea una coordenada cíclica.
8
Omar De la Peña-Seaman | IFUAP
Mecánica Clásica − M.C. Física
/43
8/43
Def. de transformaciones canónicas y función generatriz
Ejemplo: oscilador armónico (cnt.)
Proponiendo la siguiente función generatriz para obtener tal transf.,
mωq 2
Ctg Q,
2
donde las ecuaciones de transformación vienen dadas como,
F1 =
p=
∂F1
= mωqCtg Q,
∂q
P =−
∂F1
mωq 2
=
,
∂Q
2Sen2 Q
resolviendo para q(P, Q) y p(P, Q),
2P 1/2
q=
Sen Q, p = (2P mω)1/2 Cos Q,
mω
∴ encontramos la expresión para f (P ), de la propuesta original
f (P ) = (2P mω)1/2
lo cual nos arroja como Hamiltoniano,
K = H = f 2 (P )/2m = ωP
9
Omar De la Peña-Seaman | IFUAP
Mecánica Clásica − M.C. Física
/43
9/43
Def. de transformaciones canónicas y función generatriz
Ejemplo: oscilador armónico (cnt.)
Del Hamiltoniano H = ωP en el sistema (P, Q) observamos
• Q es una coordenada cíclica,
• ∴ P es constante: P = E/ω.
Hallando la ecuación de movimiento 2 ,
Q̇ =
∂H
= ω, ⇒ Q = ωt + α
∂P
Con la ecuación anterior podemos hallar las soluciones para q y p
q =
2P
mω
1/2
Sen Q =
2E
mω 2
1/2
Sen (ωt + α),
p = (2P mω)1/2 Cos Q = (2Em)1/2 Cos (ωt + α).
2
la segunda ecuación es Ṗ = −∂H/∂Q
Omar De la Peña-Seaman | IFUAP
Mecánica Clásica − M.C. Física
10
/43
10/43
Def. de transformaciones canónicas y función generatriz
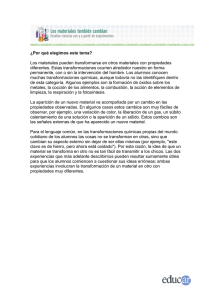
Ejemplo: oscilador armónico (cnt.)
Graficando en ambos sistemas (q, p) y (Q, P ),
p = (2Em)1/2 Cos (ωt + α)
q=
2E
mω 2
1/2
Sen (ωt + α)
q2
2E/mω 2
+
p2
2mE
=1
P
P = E/ω
Q = ωt + α
P = E/ω
11
Omar De la Peña-Seaman | IFUAP
Mecánica Clásica − M.C. Física
/43
11/43
Enfoque simpléctico y transformaciones infinitesimales
Formulación simpléctica o matricial
Otro método para estudiar las transformaciones canónicas distinto al
de funciones generatrices es la formulación simpléctica o matricial.
Consideremos una transformación canónica restringida,
Qi = Qi (q, p),
3
Pi = Pi (q, p), ⇒ K = H.
Ahora, calculando la derivada temporal de Qi de las ecs. anteriores,
Q̇i =
∂Qi
∂Qi ∂H
∂Qi ∂H
∂Qi
q̇j +
ṗj =
−
.
∂qj
∂pj
∂qj ∂pj
∂pj ∂qj
Ahora, por otro lado, si invertimos las transformaciones puntuales,
qj = qj (Q, P ),
pj = pj (Q, P ),
∴ podemos considerar H(q, p) = H(Q, P ), por tanto, calculando
∂H
∂H ∂pj
∂H ∂qj
=
+
∂Pi
∂pj ∂Pi
∂qj ∂Pi
3
es decir, que no depende del tiempo.
Omar De la Peña-Seaman | IFUAP
Mecánica Clásica − M.C. Física
12
/43
12/43
Enfoque simpléctico y transformaciones infinitesimales
Formulación simpléctica o matricial
Comparando los resultados de Q̇i y ∂H/∂Pi , tenemos que si se cumple
∂Qi
∂qj
!
=
q,p
∂pj
∂Pi
∂Qi
∂pj
,
Q,P
!
∂qj
∂Pi
=−
q,p
⇒ Q̇i =
Q,P
∂H
.
∂Pi
es decir, la transformación es canónica.
Realizando un procedimiento similar en Pi ,
Ṗi =
∂H
∂Qi
=
∂H
⇒ Ṗi = −
⇔
∂Qi
∂Pi
∂Pi
∂Pi ∂H
∂Pi ∂H
q̇j +
ṗj =
−
,
∂qj
∂pj
∂qj ∂pj
∂pj ∂qj
∂H ∂pj
∂H ∂qj
+
∂pj ∂Qi
∂qj ∂Qi
∂Pi
∂qj
!
q,p
∂pj
=−
∂Qi
,
Q,P
∂Pi
∂qj
!
=
q,p
∂qj
∂Qi
Q,P
13
Omar De la Peña-Seaman | IFUAP
Mecánica Clásica − M.C. Física
/43
13/43
Enfoque simpléctico y transformaciones infinitesimales
Formulación simpléctica o matricial
Para expresar lo anterior en forma matricial, recordemos que η contiene
los 2n elementos qj , pj y las ecs. de Hamilton vienen dadas como
"
#
∂H
0 1
, ∀ J=
.
η̇ = J
−1 0
∂η
De manera similar podemos expresar un vector de 2n entradas Qi , Pi
para una transformación cańonica,
ζ = ζ(η),
Usando de igual manera las derivadas temporales para hallar las ecs.
de movimiento para Qi y Pi ,
∂ζi
ζ̇i =
η̇j , ∀ i, j = 1, 2, . . . , 2n.
∂ηj
expresando de forma matricial lo anterior,
∂H
∂ζi
ζ̇ = Mη̇ = MJ
, ∀ Mij =
.
∂η
∂ηj
14
Omar De la Peña-Seaman | IFUAP
Mecánica Clásica − M.C. Física
/43
14/43
Enfoque simpléctico y transformaciones infinitesimales
Formulación simpléctica o matricial
Ahora, siguiendo con el procedimiento, podemos considerar H(η) =
H(ζ) gracias a la transformación inversa, por tanto
∂H
∂H
∂H
∂H ∂ζj
= M̃
,
=
, ⇒
∂η
∂ζ
∂ηi
∂ζj δηi
relacionando el resultado anterior con el de ζ̇,
∂H
∂H
ζ̇ = MJ
= MJM̃
.
∂η
∂ζ
Por otro lado, como ya se ha demostrado con el enfoque de funciones
generatrices, la transformación canónica dada por ζ = ζ(η) mantiene
H, por tanto
∂H
∂H
η̇ = J
, ⇒ ζ̇ = J
∂η
∂ζ
lo cual comparado con el resultado anterior nos arroja
MJM̃ = J
tal que la transformación ζ = ζ(η) sea canónica.
Omar De la Peña-Seaman | IFUAP
Mecánica Clásica − M.C. Física
15
/43
15/43
Enfoque simpléctico y transformaciones infinitesimales
Formulación simpléctica: propiedades y ejemplo
Algunas de las propiedades de la condición simpléctica para una transformación canónica son,
MJM̃ = J ⇒ MJ = JM̃−1 ⇒ JM = M̃−1 J
4
⇒ M̃JM = J,
en donde M es conocida como la matriz simpléctica.
Como ejemplo analicemos el caso de la función generatriz F = F2 (q1 , P1 )−
Q1 P1 + F1 (q2 , Q2 ), donde F2 (q1 , P1 ) = q1 P1 y F1 (q2 , Q2 ) = q2 Q2 ,
dF
dt
d
∂F
∂F
∂F
∂F
pi q̇i − H + K + Pi Q̇i =
(Q1 P1 ) +
ṗi +
q̇i +
Ṗi +
Q̇i
dt
∂pi
∂qi
∂Pi
∂Qi
p1 q̇1 + p2 q̇2 − H = −P1 Q̇1 − P2 Q̇2 − K + P1 Q̇1 + Q1 Ṗ1 + . . .
∂F2
∂F1
∂F2
∂F1
... +
Ṗ1 +
Q̇2
q̇1 +
q̇2 +
∂q1
∂q2
∂P1
∂Q2
pi q̇i − H = −Pi Q̇i − K +
4 2
J = −J.
Omar De la Peña-Seaman | IFUAP
16
Mecánica Clásica − M.C. Física
/43
16/43
Enfoque simpléctico y transformaciones infinitesimales
Formulación simpléctica: propiedades y ejemplo
Relacionando término a término tenemos,
p1 q̇1 + p2 q̇2 − H = −P1 Q̇1 − P2 Q̇2 − K + P1 Q̇1 + Q1 Ṗ1 + . . .
∂F2
∂F1
∂F2
∂F1
... +
q̇1 +
q̇2 +
Ṗ1 +
Q̇2
∂q1
∂q2
∂P1
∂Q2
∂F2
∂F1
= P1 ,
= Q2 ,
p1 =
p2 =
∂q1
∂q2
∂F1
∂F2
P2 = −
= −q2 ,
Q1 =
= q1 ,
∂Q2
∂P1
en donde F2 (q1 , P1 ) = q1 P1 y F1 (q2 , Q2 ) = q2 Q2 .
Ahora, expresando lo obtenido anteriormente en términos de la formulación simpléctica tenemos,
q1
q
η = 2 ,
p1
p2
Omar De la Peña-Seaman | IFUAP
Q1
Q
ζ = 2 ,
P1
P2
Mecánica Clásica − M.C. Física
17
/43
17/43
Enfoque simpléctico y transformaciones infinitesimales
Formulación simpléctica: propiedades y ejemplo
Por tanto, la transformación ζ̇ = Mη̇ queda como
Q̇1
1 0
Q̇ 0 0
2
=
Ṗ1 0 0
0 −1
Ṗ2
0
0
1
0
0 q̇1
q̇1
1 q̇2 ṗ2
=
0 ṗ1 ṗ1
0 ṗ2
−q̇2
dando como resultado la transf. original deseada. 5
Ahora, obteniendo las ecs. de Hamilton para las variables transformadas, ζ̇ = J∂H/∂ζ (independiente de la transformación F )
Q̇1
0
0
Q̇ 0
0
2
=
Ṗ1 −1 0
0 −1
Ṗ2
1
0
0
0
0 −Ṗ1
1
−Ṗ2
0 Q̇1
0
Q̇2
donde −Ṗi = ∂H/∂ζi para i = 1, 2 y Q̇i = ∂H/∂ζi para i = 3, 4.
5
el par 1 sin cambios y en el 2 intercambiados con signo opuesto.
Omar De la Peña-Seaman | IFUAP
Mecánica Clásica − M.C. Física
18
/43
18/43
Enfoque simpléctico y transformaciones infinitesimales
Transformaciones infinitesimales
Para el caso de transformaciones canónicas ζ = ζ(η, t) se sigue manteniendo que MJM̃ = J, 6 aunque el procedimiento anterior para
demostrarlo no.
Por ello, podemos implicar
if η → ζ(t), then η → ζ(t0 ) ∴ ζ(t0 ) → ζ(t)
es también una transformación canónica, siendo t0 una constante fija.
Por tanto, si podemos demostrar que ζ(t0 ) → ζ(t) es una transf.
canónica, entonces llegaremos a que η → ζ(t) también lo es.
Para ello introducimos el concepto de transformación canónica infinitesimal, en donde solamente términos de primer órden de los infinitesimales son retenidos en el cálculo,
Qi = qi + δqi , Pi = pi + δpi , ⇒ ζ = η + δη.
6
conocida como condición simpléctica.
Omar De la Peña-Seaman | IFUAP
Mecánica Clásica − M.C. Física
19
/43
19/43
Enfoque simpléctico y transformaciones infinitesimales
Transformaciones infinitesimales
En el formalismo de las funciones generatrices, una transf. canónica
infinitesimal podria ser expresada como
F2 = qi Pi + G(q, P, t),
obteniendo las funciones de transformación para F2 ,
∂F2
∂G
= Pj + ∂qj
∂qj
∂F2
∂G
Qj =
= qj + ∂Pj
∂Pj
pj =
∂G
∂qj
∂G
⇒ δqj = Qj − qj = ∂Pj
⇒ δpj = Pj − pj = −
En la ec. para δqj tenemos que es lineal en , además de que P
y p difieren por un infinitesimal, ⇒ a primer orden podemos hacer
Pj → p j ,
∂G
∂G
δqj = , ∴ δη = J
.
∂pj
∂η
en donde G(q, p) es la función generatriz de la transformación canónica
infinitesimal.
20
Omar De la Peña-Seaman | IFUAP
Mecánica Clásica − M.C. Física
/43
20/43
Enfoque simpléctico y transformaciones infinitesimales
Transformaciones infinitesimales
Para demostrar que la transf. infinitesimal ζ = η + δη es canónica,
calculemos el Jacobiano,
M=
∂(δη)
∂2G
∂ζ
=1+
= 1 + J
∂η
∂η
∂η∂η
∀ δη = J
∂G
∂η
en donde la segunda derivada representa una matriz cuadrada simétrica,
∂2G
∂η∂η
!
=
i,j
∂2G
.
∂ηi ∂ηj
Debido a J̃ = −J, M̃ viene dada como
M̃ = 1 − ∂2G
J.
∂η∂η
21
Omar De la Peña-Seaman | IFUAP
Mecánica Clásica − M.C. Física
/43
21/43
Enfoque simpléctico y transformaciones infinitesimales
Transformaciones infinitesimales
Calculando la condición simpléctica,
!
MJM̃ =
∂2G
1 + J
∂η∂η
∂2G
J 1−
J
∂η∂η
!
=
∂2G
1 + J
∂η∂η
∂2G
J − J
J
∂η∂η
= J − J
!
!
∂2G
∂2G
J + J
J + O(2)
∂η∂η
∂η∂η
MJM̃ = 1.
Por tanto, la condición simpléctica se mantiene para cualquier transformación canónica, ya sea que involucre al tiempo o no.
22
Omar De la Peña-Seaman | IFUAP
Mecánica Clásica − M.C. Física
/43
22/43
Corchetes de Poisson y de Lagrange e invariantes canónicos
Definición y fundamentos
Consideremos a f = f (p, q, t), ⇒ su derivada total viene dada como
df
=
dt
df
=
dt
en donde hemos
∂f
∂f
∂f
+
q̇k +
ṗk ,
∂t
∂qk
∂pk
∂f ∂H
∂f ∂H
∂f
∂f
+
−
+ [f, H]
=
∂t
∂qk ∂pk
∂pk ∂qk
∂t
definido al corchete de Poisson de f y H como
∂f ∂H
∂f ∂H
[f, H] =
−
∂qk ∂pk
∂pk ∂qk
para el caso de que f sea una integral de movimiento,
∂f
+ [f, H] = 0
∂t
Si además la integral de movimiento f 6= f (t),
7
tenemos
[f, H] = 0.
7
df /dt = 0
Omar De la Peña-Seaman | IFUAP
23
Mecánica Clásica − M.C. Física
/43
23/43
Corchetes de Poisson y de Lagrange e invariantes canónicos
Propiedades
En general, para cualquiera dos cantidades f y g, el corchete de Poisson
se define como
∂f ∂g
∂f ∂g
[f, g] =
−
.
∂qk ∂pk
∂pk ∂qk
Algunas propiedades de los corchetes de Poisson son las siguientes,
[f, g] = − [g, f ] ,
[f, c] = 0, ∀ c = cte.
[f1 + f2 , g] = [f1 , g] + [f2 , g] ,
[f1 f2 , g] = f1 [f2 , g] + f2 [f1 , g] ,
∂
∂f
∂g
[f, g] =
, g + f,
.
∂t
∂t
∂t
Si f o g corresponde a pk o qk , entonces,
[f, qk ] = −
∂f
,
∂pk
[f, pk ] =
∂f
.
∂qk
24
Omar De la Peña-Seaman | IFUAP
Mecánica Clásica − M.C. Física
/43
24/43
Corchetes de Poisson y de Lagrange e invariantes canónicos
Propiedades
De la propiedad anterior se sigue que,
[qj , qk ] = 0, [pj , pk ] = 0, [qj , pk ] = δjk .
Además, si consideramos que f sea una variable canónica y g = H,
[qk , H] = q̇k ,
[pk , H] = ṗk .
De igual manera describimos las relaciones de L = r × p,
[Li , Lj ] = ijk Lk , 8 & [pi , Lj ] = ijk pk .
Otra propiedad importante es el teorema de Poisson,
df
dg
[f, g] = cte. ⇔
=
= 0. (f y g ctes. de movimiento)
dt
dt
También tenemos a la conocida como identidad de Jacobi,
[f, [g, h]] + [g, [h, f ]] + [h, [f, g]] = 0,
8
en donde ijk es +1 si tenemos una permutación cíclica, −1 si es no-cíclica y
0 si se tienen indices repetidos.
25
Omar De la Peña-Seaman | IFUAP
Mecánica Clásica − M.C. Física
/43
25/43
Corchetes de Poisson y de Lagrange e invariantes canónicos
Transfomaciones canónicas
Si tenemos una transformación entre las coordenadas (q, p) y (Q, P )
tal que se mantenga
[f, g]q,p = [f, g]Q,P
∂f ∂g
∂f ∂g
∀ [f, g]q,p =
−
∂qk ∂pk
∂pk ∂qk
∂f ∂g
∂f ∂g
y [f, g]Q,P =
−
∂Qk ∂Pk
∂Pk ∂Qk
entonces se tiene que la transformación es canónica. En otras palabras,
el corchete de Poisson es invariante antes transf. canónicas.
Entonces, tenemos que para transformaciones canónicas se cumple,
[Qj , Qk ]q,p = 0, [Pj , Pk ]q,p = 0, [Qj , Pk ]q,p = δjk .
26
Omar De la Peña-Seaman | IFUAP
Mecánica Clásica − M.C. Física
/43
26/43
Corchetes de Poisson y de Lagrange e invariantes canónicos
Corchetes de Lagrange
Otro invariante canónico es el llamado corchete de Lagrange, definido
como,
∂qk ∂pk
∂pk ∂qk
{f, g}q,p =
−
,
∂u ∂v
∂u ∂v
en donde si f y g corresponden a dos miembros del set (q, p), ⇒
{qj , qk }q,p = 0, {pj , pk }q,p = 0, {qj , pk }q,p = δjk .
IMP: Muchas de las propiedades de los corchetes de Poisson se
cumplen también en los corchetes de Lagrange, excepto la identidad
de Jacobi. 9
9
[f, [g, h]] + [g, [h, f ]] + [h, [f, g]] = 0
Omar De la Peña-Seaman | IFUAP
Mecánica Clásica − M.C. Física
27
/43
27/43
Teoremas de Liouville y Noether
Fundamentos: espacio fase
En el formalismo Hamiltoniano el estado del movimiento de un sistema
mecánico con n grados de libertad está caracterizado por
• n coordenadas q1 , q2 , . . . , qn , y
• n momentos p1 , p2 , . . . , pn generalizados,
en donde las 2n coord. y momentos son independientes.
Las coord. y momentos generalizados forman espacios particulares,
• (qi , pi ): espacio 2n-dimensional cartesiano llamado espacio fase.
• qi : subespacio n-dimensional llamado espacio de configuración.
• pi : subespacio n-dimensional llamado espacio de momentos.
Para el caso del espacio fase, el curso del movimiento de un punto
(qi , pi ) es conocido como la trayectoria de fase dada por la representación paramétrica qk (t), pk (t).
28
Omar De la Peña-Seaman | IFUAP
Mecánica Clásica − M.C. Física
/43
28/43
Teoremas de Liouville y Noether
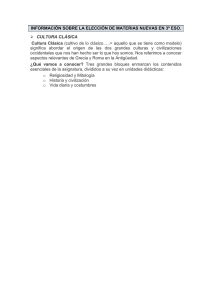
Espacio fase del péndulo planar
Consideremos al péndulo planar
V =0
y
ϕ
Construyendo el Hamiltoniano,
H = T + V = ml2 ϕ̇2 − mglCos ϕ
= p2ϕ /2ml2 − mglCos ϕ = E
l
Por tanto, la trayectoria de fase
pϕ = pϕ (ϕ) es
m
(x, y)
q
pϕ = ± 2ml2 (E + mglCos ϕ)
x
Si tomamos a ϕ como la coordenada generalizada,
⇒ L = ml2 ϕ̇2 + mglCos ϕ
∴ pϕ = ∂L/∂ ϕ̇ = ml2 ϕ̇
29
Omar De la Peña-Seaman | IFUAP
Mecánica Clásica − M.C. Física
/43
29/43
Teoremas de Liouville y Noether
Espacio fase del péndulo planar
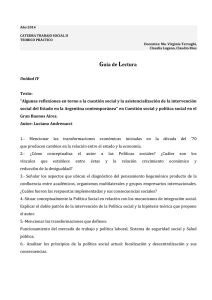
Al ser E un parámetro en la trayectoria de fase tendremos dos casos:
• E < mgl: las trayectorias son curvas cerradas (tipo elipse) ⇒ el
péndulo oscila ∴ el movimiento es de vibración.
• E > mgl: las trayectorias son curvas abiertas ⇒ el péndulo
continúa su mov. ∴ el movimiento es de rotación.
Omar De la Peña-Seaman | IFUAP
Mecánica Clásica − M.C. Física
30
/43
30/43
Teoremas de Liouville y Noether
Teorema de Liouville
Consideremos un gran número N de puntos independientes idénticos
entre sí, ⇒ son descritos por el mismo H, ∴ si todos los puntos a un
tiempo t1 son distribuidos en un espacio fase 2n-dimensional G1 con
volumen,
∆V = ∆q1 ∆q2 . . . ∆qn · ∆p1 ∆p2 . . . ∆pn ,
entonces podemos definir la densidad como ρ = ∆N/∆V y donde con
el curso del movimiento G1 → G2 deacuerdo a las ecs. de Hamilton,
31
Omar De la Peña-Seaman | IFUAP
Mecánica Clásica − M.C. Física
/43
31/43
Teoremas de Liouville y Noether
Teorema de Liouville
Teorema de Liouville
• El volumen de una región arbitraria del espacio fase se conserva si
los puntos de la frontera se mueven de acuerdo a las ecuaciones
canónicas.
• La densidad de puntos en el espacio fase en la vecindad de un
punto que se mueve con el fluido es constante.
32
Omar De la Peña-Seaman | IFUAP
Mecánica Clásica − M.C. Física
/43
32/43
Teoremas de Liouville y Noether
Teorema de Liouville
El segundo enunciado del teorema de Liouville establece una ecuación
de continuidad,
0 = ∇(ρṙ) +
∂ρ
∂t
∂
∂
∂ρ
(ρq̇k ) +
(ρṗk ) +
∂qk
∂pk
∂t
∂ρ
∂ρ
∂ q̇k
=
+
q̇k + ρ
+ ...
∂t
∂qk
∂qk
∂ρ
∂ ṗk
... +
ṗk + ρ
∂pk
∂pk
de las ecuaciones de Hamilton tenemos,
=
∂ q̇k
∂2H
∂ ṗk
∂2H
=
&
=−
∂qk
∂pk ∂qk
∂pk
∂qk ∂pk
⇒
Omar De la Peña-Seaman | IFUAP
∂ q̇k
∂ ṗk
+
=0
∂qk
∂pk
Mecánica Clásica − M.C. Física
33
/43
33/43
Teoremas de Liouville y Noether
Teorema de Liouville
Sustituyendo en la ec. de continuidad, tenemos
∂ρ
∂ρ
∂ q̇k
∂ρ
∂ ṗk
+
q̇k + ρ
+
ṗk + ρ
∂t
∂qk
∂qk
∂pk
∂pk
∂ρ
∂ρ
∂ρ
⇒
+
q̇k +
ṗk
∂t
∂qk
∂pk
∂ρ
∂ρ ∂H
∂ρ ∂H
+
−
∂t
∂qk ∂pk
∂pk ∂qk
∂ρ
+ [ρ, H]
∂t
dρ
dt
= 0
= 0
= 0
= 0
= 0
por tanto,
ρ = cte.
lo que demuestra el teorema de Liouville.
34
Omar De la Peña-Seaman | IFUAP
Mecánica Clásica − M.C. Física
/43
34/43
Teoremas de Liouville y Noether
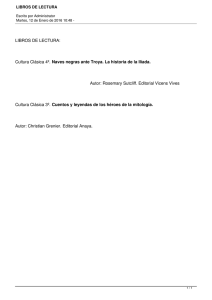
Ejemplo: densidad en el espacio fase para partículas en el campo gravitatorio
El sistema consiste de partículas de masa m en un campo gravitacional
constante, por tanto el Hamiltoniano viene dado como
H=E=
p2
mq̇ 2
− mgq, donde: T =
, V = mgq.
2m
2
donde por tener H 6= H(t) el sistema se conservativo: E = cte.
Construyendo las trayectorias de
fase p(q) de la ec. anterior,
p=
q
2m(E + mgq),
Consideramos que las partículas
en t = 0 tienen de límites
p1 ≤ p ≤ p2 , E1 ≤ E ≤ E2 ,
en un área F del espacio fase.
Omar De la Peña-Seaman | IFUAP
Mecánica Clásica − M.C. Física
35
/43
35/43
Teoremas de Liouville y Noether
Ejemplo: densidad en el espacio fase para partículas en el campo gravitatorio
Para un t > 0 el momento será
p0 = p + mgt,
con un área F 0 limitada por,
p1 + mgt ≤ p0 ≤ p2 + mgt,
(p2 /2m) − E
con q =
.
mg
Calculando el área F ,
Z p2
F
p1
=
Z q1
dp
=
q2
E2 − E1
mg
Z [(p2 /2m)−E1 ]/mg
Z p2
dq =
dp
p1
Z p2
dp =
p1
dq
[(p2 /2m)−E2 ]/mg
E2 − E1
(p2 − p1 ).
mg
36
Omar De la Peña-Seaman | IFUAP
Mecánica Clásica − M.C. Física
/43
36/43
Teoremas de Liouville y Noether
Ejemplo: densidad en el espacio fase para partículas en el campo gravitatorio
De manera análoga para el área F 0 ,
F
0
=
Z p0
2
p01
dp
0
Z q0
1
q20
dq 0
E2 − E1 0
(p2 − p01 )
mg
pero p0 = p + mgt.
E2 − E1
⇒ F0 =
(p2 − p1 ).
mg
El resultado anterior no es otra cosa que el teorema de Liuoville:
=
F = F 0,
lo cual significa que la densidad del sistema de puntos en el espacio
fase permanece constante si (q, p) obedecen las ecuaciones canónicas.
37
Omar De la Peña-Seaman | IFUAP
Mecánica Clásica − M.C. Física
/43
37/43
Teoremas de Liouville y Noether
Teorema de Noether y transformaciones puntuales
La conexión entre invariancia y conservación en sistemas coordenados
puede ocurrir en casos en donde no existan coordenadas cíclicas o
ignorables.
Teorema de Noether
Si el Lagrangiano es invariante ante una familia de transformaciones,
entonces su sistema dinámico posee una constante de movimiento, la
cual puede ser hallada conociendo el Lagrangiano y la transformación.
Las transformaciones que se mencionan son del tipo puntuales,
∂ψα
= q̇α .
∂t
en donde representa a la familia de transformaciones.
Asumimos que L es invariante ante la familia de transformaciones,
ψα = qα + ηα , ∀
L (q, q̇, t) = L ψ(q),
∂
ψ(q), t
∂t
38
Omar De la Peña-Seaman | IFUAP
Mecánica Clásica − M.C. Física
/43
38/43
Teoremas de Liouville y Noether
Teorema de Noether
Calculando la derivada respecto ,
∂L
∂
=
=
∂L ∂ψα
∂L ∂ ψ̇α
+
∂ψα ∂
∂ ψ̇α ∂
∂L ∂ q̇α 10
∂L
ηα +
∂ψα
∂ ψ̇α ∂
evaluando cuando → 0, entonces ψ0 (q) = q, y
∂L
∂L
∂L = δL =
δqα +
δ q̇α 11
∂ =0
∂qα
∂ q̇α
pero recordemos,
d
dt
10
11
∂L
δqα =
∂ q̇α
d ∂L
∂L
δqα +
δ q̇α
dt ∂ q̇α
∂ q̇α
ψα = qα + ηα , ψ̇α = q̇α
ηα → δqα
Omar De la Peña-Seaman | IFUAP
39
Mecánica Clásica − M.C. Física
/43
39/43
Teoremas de Liouville y Noether
Teorema de Noether
Sustituyendo en δL,
δL =
d ∂L
d
∂L
−
δqα +
∂qα dt ∂ q̇α
dt
∂L
δqα
∂ q̇α
el primer término son las ecs. de Lagrange, e invocando ahora la
invariancia de L, tenemos
δL = 0, ⇒
d
dt
∂L
∂L
δqα
δqα = 0 ∴ Γ ≡
∂ q̇α
∂ q̇α
es una constante de movimiento, lo cual representa al teorema de
Noether: a cada simetría de q descubierta en L corresponde una constante de movimiento.
40
Omar De la Peña-Seaman | IFUAP
Mecánica Clásica − M.C. Física
/43
40/43
Teoremas de Liouville y Noether
Teorema de Noether: ejemplo
Consideremos el caso del potencial central en coordenadas cartesianas,
1 L = m ẋ2 + ẏ 2 + V (r), ∀ r2 = x2 + y 2 .
2
ahora, el Lagrangiano anterior es invariante ante rotaciones del tipo,
x0 = xCos − ySen , y 0 = xSen + yCos .
Para hacer uso del teorema de Noether, calculamos las δq’s
12
∂x0
= −xSen − yCos ⇒ δx0 = δx = −y,
∂
∂y 0
= xCos − ySen ⇒ δy 0 = δy = x,
∂
∂L
∂L
∂L
δqα =
δy +
δx = m (xẏ − y ẋ) .
∂ q̇α
∂ ẏ
∂ ẋ
lo cual representa el momento angular.
⇒ tenemos Γ =
12
recordemos que δ ≡ ∂/∂|=0
Omar De la Peña-Seaman | IFUAP
41
Mecánica Clásica − M.C. Física
/43
41/43
Teoremas de Liouville y Noether
Teorema de Noether: generalización
Podemos generalizar el teorema de Noether, en el sentido de que L no
tiene por que ser estrictameente invariante ante una transformación, si
no que puede cambiar como sigue,
L = L + Φ̇(q, t, ).
Ahora, como sabemos
13
que una transformación del tipo
L→L+
d
Φ(q, t)
dt
deja las ecuaciones de movimiento y de Lagrange invariantes, el teorema
de Noether especifica que tal transformación dará una constante de
movimiento, en ese caso
δL =
13
d
δΦ,
dt
demostrar!!
Omar De la Peña-Seaman | IFUAP
42
Mecánica Clásica − M.C. Física
/43
42/43
Teoremas de Liouville y Noether
Teorema de Noether: generalización
Combinando el resultado anterior con la ec. siguiente,
∂L
d ∂L
d
−
δqα +
∂qα dt ∂ q̇α
dt
d ∂L
δqα
dt ∂ q̇α
d ∂L
δqα − δΦ
dt ∂ q̇α
δL =
⇒
d
δΦ =
dt
∴ 0 =
∂L
δqα
∂ q̇α
por tanto, llegamos a que la función
Γ=
∂L
δqα − δΦ
∂ q̇α
es una constante de movimiento.
La transformación L → L + dΦ(q, t)/dt se le conoce como transformación de norma, por tanto el teorema de Noether establece que
una cte. de movimiento se asocia con toda invariancia de norma del
Lagrangiano bajo una familia de transformaciones dada.
43
Omar De la Peña-Seaman | IFUAP
Mecánica Clásica − M.C. Física
/43
43/43