Funciones en Rn
Conceptos métricos y topológicos
Lı́mites y continuidad en R2
Funciones en Rn : nociones topológicas
Funciones en Rn
Conceptos métricos y topológicos
1
Funciones en Rn
2
Conceptos métricos y topológicos
3
Lı́mites y continuidad en R2
Lı́mites y continuidad en R2
Funciones en Rn
Conceptos métricos y topológicos
Lı́mites y continuidad en R2
Definición
Definición
Llamaremos función escalar real de n variables reales, o
campo escalar, a cualquier f : X ⊆ Rn −→ R tal que a cada
(x1 , x2 , ..., xn ) ∈ X le asocie f (x1 , x2 , ..., xn ) ∈ R. Al conjunto X
sobre el que está definida se le llama dominio de f .
Por ejemplo, consideremos la función f : R2 → R dada por
f (x, y ) = x 2 + y 2 .
Funciones en Rn
Conceptos métricos y topológicos
Lı́mites y continuidad en R2
Funciones en Rn
Conceptos métricos y topológicos
Lı́mites y continuidad en R2
Funciones en Rn
Conceptos métricos y topológicos
Lı́mites y continuidad en R2
Ejercicio
Estudia el dominio de la función f (x, y ) =
sen (xy)
xy
Funciones en Rn
Conceptos métricos y topológicos
1
Funciones en Rn
2
Conceptos métricos y topológicos
3
Lı́mites y continuidad en R2
Lı́mites y continuidad en R2
Funciones en Rn
Conceptos métricos y topológicos
Lı́mites y continuidad en R2
Normas
Definición
Llamamos norma en Rn a cualquier k.k : Rn −→ R+ ∪ {0} que
cumpla:
(a) kxk = 0 ⇔ x = 0
(b) kλxk = |λ| kxk ∀x ∈ Rn , ∀λ ∈ R
(c) kx + yk ≤ kxk + kyk ∀x, y ∈ Rn
Funciones en Rn
Lı́mites y continuidad en R2
Conceptos métricos y topológicos
Ejemplos de normas
Ejemplos: Sea x ∈ Rn , x = (x1 , x2 , ..., xn ). Las siguientes son
normas en Rn :
n
P
|xi |
kxk1 = |x1 | + |x2 | + ... + |xn | =
i=1
s
q
n
P
kxk2 = |x1 |2 + |x2 |2 + ... + |xn |2 =
xi2 , esta es la
i=1
llamada norma euclı́dea.
s
q
n
P
p
p
p
p
kxkp = |x1 | + |x2 | + ... + |xn | = p
|xi |p , para
i=1
cualquier natural p.
kxk∞ = máx (|x1 | , |x2 | , ..., |xn |)
Funciones en Rn
Conceptos métricos y topológicos
Lı́mites y continuidad en R2
Ejemplo
Calcula los distintos valores de las normas para el vector
x = (−1, 3, 4, −7) ∈ R4 :
kxk1 = |x1 | + |x2 | + ... + |xn | = |−1| + |3| + |4| + |−7| = 15
q
p
kxk2 = x12 + x22 + ... + xn2 = (−1)2 + (3)2 + (4)2 + (−7)2 =
√
75
kxk∞ = máx (|x1 | , |x2 | , ..., |xn |) = máx (|−1| , |3| , |4| , |−7|) = 7
Funciones en Rn
Conceptos métricos y topológicos
Lı́mites y continuidad en R2
Ejemplo
Calcula los distintos valores de las normas para el vector
x = (−1, 3, 4, −7) ∈ R4 :
kxk1 = |x1 | + |x2 | + ... + |xn | = |−1| + |3| + |4| + |−7| = 15
q
p
kxk2 = x12 + x22 + ... + xn2 = (−1)2 + (3)2 + (4)2 + (−7)2 =
√
75
kxk∞ = máx (|x1 | , |x2 | , ..., |xn |) = máx (|−1| , |3| , |4| , |−7|) = 7
Funciones en Rn
Conceptos métricos y topológicos
Lı́mites y continuidad en R2
Ejemplo
Calcula los distintos valores de las normas para el vector
x = (−1, 3, 4, −7) ∈ R4 :
kxk1 = |x1 | + |x2 | + ... + |xn | = |−1| + |3| + |4| + |−7| = 15
q
p
kxk2 = x12 + x22 + ... + xn2 = (−1)2 + (3)2 + (4)2 + (−7)2 =
√
75
kxk∞ = máx (|x1 | , |x2 | , ..., |xn |) = máx (|−1| , |3| , |4| , |−7|) = 7
Funciones en Rn
Conceptos métricos y topológicos
Lı́mites y continuidad en R2
Bolas
Se define bola abierta centrada en a ∈ Rn de radio δ > 0 al
conjunto:
n
o
Bp (a, δ) = x ∈ Rn : kx − akp < δ
Análogamente, se define bola cerrada centrada en a ∈ Rn de
radio δ > 0 al conjunto:
n
o
x ∈ Rn : kx − akp ≤ δ
Funciones en Rn
Conceptos métricos y topológicos
Lı́mites y continuidad en R2
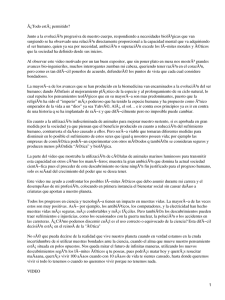
Bola centrada en (0, 0) y de radio 1 (norma kk1 )
Bola centrada en (0, 0) y de radio 1 (norma kk2 )
Funciones en Rn
Conceptos métricos y topológicos
Lı́mites y continuidad en R2
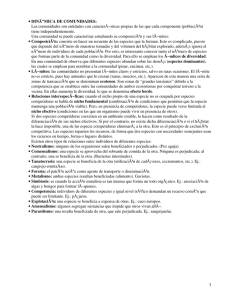
Bola centrada en (0, 0) y de radio 1 (norma kk∞ )
Funciones en Rn
Conceptos métricos y topológicos
Lı́mites y continuidad en R2
Definición
Sea X ⊂ Rn y sea a ∈ X . Diremos que a es un punto interior de
X , o bien que X es un entorno de a, si:
existe un δ > 0 tal que B(a, δ) ⊆ X
Diremos que X ⊆ Rn es un conjunto abierto si todos sus
puntos son interiores. Diremos que X ⊆ Rn es un conjunto
cerrado su complementario (Rn \ X ) es un conjunto abierto.
Es fácil ver que el concepto de punto interior no depende de la
norma utilizada. Por lo tanto, tampoco dependen los conceptos
de conjunto abierto y conjunto cerrado.
Funciones en Rn
Conceptos métricos y topológicos
Lı́mites y continuidad en R2
Sucesiones en Rn
n
o∞
x (k)
≡ x (1) , x (2) , x (3) , x (4) , . . .
k=1
es decir, es una sucesión de puntos x (k) en Rn , luego cada uno
tiene n componentes:
(k) (k)
(k)
x (k) = x1 , x2 , . . . , xn
Definición
Diremos que la sucesión
x ∈ Rn si:
∀ε > 0 ∃N ∈ N :
x (k)
∞
k=1
es convergente al punto
n ≥ N ⇒ kxn − xkp < ε.
Puede probarse que la convergencia no depende de la norma utilizada.
Funciones en Rn
Conceptos métricos y topológicos
Lı́mites y continuidad en R2
Convergencia ≡ convergencia componente a
componente
Teorema
∞
Una sucesión x (k) k=1 en Rn es convergente a x ∈ Rn si, y
sólo si, converge componente a componente.
Por ejemplo:
La sucesión en R3 ,
n
1
n,
√
n
1
n, e n
o+∞
n=1
, es convergente a
(0, 1, 1) .
1 √
+∞
n
n
La sucesión en R3 ,
es divergente ya que la
n , n, e
n=1
sucesión {en } es divergente.
Funciones en Rn
Conceptos métricos y topológicos
1
Funciones en Rn
2
Conceptos métricos y topológicos
3
Lı́mites y continuidad en R2
Lı́mites y continuidad en R2
Funciones en Rn
Conceptos métricos y topológicos
Lı́mites y continuidad en R2
Continuidad
Definición
Sea una función f : X ⊆ Rn → R y sea a un punto interior de
X . Diremos que f es continua en a si
lı́m f (x) = f (a),
x→a
es decir, si
i) ∀ x (k) → a, x (k) ∈ X =⇒ {f x (k) } → f (a)
ii) ∀ ε > 0 ∃ δ > 0 : si kx − ak < δ =⇒ |f (x) − f (a)| < ε
Si f es continua ∀a ∈ X se dice que f es continua en X .
La continuidad no depende de la norma escogida.
Funciones en Rn
Conceptos métricos y topológicos
Lı́mites y continuidad en R2
Teorema de Weierstrass
Un conjunto X ⊆ Rn es cerrado si su complementario (es
decir, Rn \ X ) es abierto.
Un conjunto X ⊆ Rn es acotado si existe una bola que lo
contiene.
Teorema de Weierstrass
Sea X ⊆ Rn un conjunto cerrado y acotado y sea f una función
continua en X . Entonces f alcanza su máximo y su mı́nimo en
X.
Funciones en Rn
Conceptos métricos y topológicos
Lı́mites y continuidad en R2
Lı́mites reiterados
Teorema 1
Si existe el lı́mite L =
lı́m
f (x, y) entonces existen los
(x,y)→(x0 ,y0 )
lı́mites reiterados y son iguales a L:
lı́m lı́m f (x, y) = L
x→x0
y→y0
lı́m
y→y0
lı́m f (x, y) = L
x→x0
Ejercicio: Deduce que el lı́mite siguiente no existe:
lı́m
(x,y)→(0,0)
x2 − y2
.
x2 + y2
Funciones en Rn
Conceptos métricos y topológicos
Desearı́amos calcular el lı́mite
lı́m
(x,y)→(0,0)
Lı́mites y continuidad en R2
x2 − y2
p
o
x 2 + y 2.
determinar que no existe.
Los lı́mites reiterados existen y ambos son iguales a 0
(comprobar). Sin embargo esta condición NO ES SUFICIENTE
para asegurar que el lı́mite existe y vale 0.
Lı́mites direccionales
Consideremos una dirección dada por un vector ~v = (v1 , v2 )
“¿A qué tiende una función f (x, y ) cuando (x, y ) se acerca a
~a = (a1 , a2 ) por la dirección de ~v ?”
lı́m
(x, y) → (a1 , a2 )
(x, y ) = (a1 , a2 ) + λ(v1 , v2 )
f (x, y) := lı́m f (a1 + λv1 , a2 + λv2 )
λ→0
Funciones en Rn
Conceptos métricos y topológicos
Lı́mites y continuidad en R2
Lı́mites direccionales
Ejercicio: Calcula los lı́mites direccionales correspondiente al
lı́mite anterior y comprueba que son todos nulos.
Proposición
Si existe el lı́mite
lı́m
(x,y)→(a1 ,a2 )
f (x, y ) entonces existen todos los
lı́mites direccionales y son iguales.
Sin embargo... El recı́proco no es cierto.
Por tanto, lo realizado en el ejercicio anterior no es suficiente
como para afirmar que el lı́mite buscado es igual a 0.
Funciones en Rn
Conceptos métricos y topológicos
Lı́mites y continuidad en R2
Lı́mites direccionales
Ejercicio: Calcula los lı́mites direccionales correspondiente al
lı́mite anterior y comprueba que son todos nulos.
Proposición
Si existe el lı́mite
lı́m
(x,y)→(a1 ,a2 )
f (x, y ) entonces existen todos los
lı́mites direccionales y son iguales.
Sin embargo... El recı́proco no es cierto.
Por tanto, lo realizado en el ejercicio anterior no es suficiente
como para afirmar que el lı́mite buscado es igual a 0.
Funciones en Rn
Conceptos métricos y topológicos
Lı́mites y continuidad en R2
Paso a coordenadas polares
Teorema
Sea f : R2 \ {(0, 0)} −→ R y sea la función definida como
F (ρ, θ) = f (ρ cos θ, ρ sin θ) con ρ > 0 i 0 < θ ≤ 2π. Entonces,
lı́m(x,y)→(0,0) f (x, y ) = λ si, y sólo si,
lı́mρ→0 F (ρ, θ) = λ uniformemente en θ es decir, si dado > 0
existe ρ0 > 0 tal que si 0 < ρ < ρ0 entonces |F (ρ, θ) − λ| < ,
para todo θ.
Resultado útil
Si F (ρ, θ) − λ = G(ρ)H(ρ, θ) con lı́mρ→0 G(ρ) = 0 y H(ρ, θ) una
función acotada, entonces lı́mρ→0 F (ρ, θ) = λ uniformemente
en θ.
Ejercicio: Demuestra que el lı́mite del ejemplo anterior es igual
a 0.
Funciones en Rn
Conceptos métricos y topológicos
Lı́mites y continuidad en R2
Ejercicio
¿Es contı́nua la función f (x, y) tal que f (x, y ) =
f (x, y ) 6= (0, 0) y f (0, 0) = 1?
sin(x 2 +y 2 )
x 2 +y 2
si
 0
0