Ejemulo 2: C(s) Kp R(s) s(s+lXs+5)+Kp
Anuncio
 Kp R(s) s(s+lXs+5)+Kp")
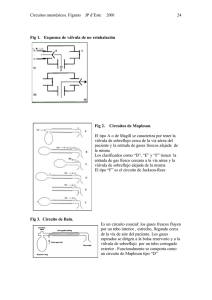
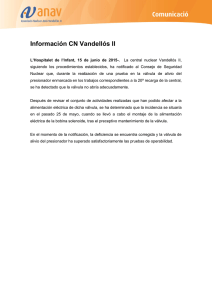
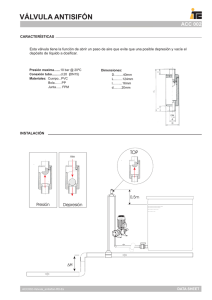
Ejemulo 2: Considereel sistemamostradoa continuación: t C(s) .1("+ IX" + S) PID Como la plantatiene un integrador, seempleael siguientemétodo Haciendo Ti C(s) -= R(s) = 00 y Td = O, seobtienela FTLC : Kp s(s+lXs+5)+Kp Fig 2.1 Respuestatemporaldel sistemacon Kp=1 ante un escalónunitario . -. Cálculo de Kcr criterio de Routh La ecuac SJ 1 52 6 SJ+6S2+5s+Kp=O Kcr 30 - Kp Si SO JD 6 Kp 2 1.8 .. 1.4 12 , 1 0.8 o.e O." 02 O O 5 10 tiempo 15 20 Fig 2.2 Respuestatemporal del sistemacon Kp=30 anteun escalónunitario SistemaCríticamenteestable. . Cálculo de la frecuencia de oscilación sostenida Sereemplazas = jw en la ecuación característica (jw)J + 6(jW)2+ S(jw) + 30 = O de donde: W2= 5 ... ~ w - 2/r - 21r = 2,81 Pcr=-W""¡:J "s =.,f5 6(5-w2) + jW(5-W2) = o . Cálculo de Kp,Ti, Td.(Ziegler - Kp Ti Td 0,6 Kcr 0,5 Pcr O,125Pcr - Nichols) - 18 1,405 0,35124 :. Gc = 1 ~1+ 1,~5.S +0,35124,5) . Cálculo de la FfLC y respuestatemporal e = 8. R 6.3223.5% + 18.8+12,811 +11,3223.8% +18.5+12,111 +6.13 1~ ~ 1.8 1.4 1.2 1 ~0.8 r(t) 0.8 0.4 0.2 O O 5 10 15 20 tiempo Fig 2.3 Respuestatemporaldel sistemacontroladocon un PID anteun escalónunitario. Representaciónen variables de estado(facilitala respuestatemporalcomputacional) Xt=C X2= X4=X3 '+ = 19t9338 o o o XI . , XJ = X2 , u=r o XI O Xl 1 -6 XI Y = [1 O O O X2 X3 x. -6,3223u . ~ o 6,3223 + -19,9338 u x3 x. t 60,8308 y = e = Xl [¡emulo 3 : Considereal sistemamostradoen la figura 1, dondeun motor DC mueveuna válvula de control lo cual supleun flujo a una máquinahidráulica, corrienteabajode la válvula Figura 1 : Control de flujo En estadoestacionarioVR=6mAparaun requerimientode 20 gaVrnin f: 5%. Cuandoel requerimientoes de 100gal/min ::t2%, VR=14mA. El escalónde 6-14 mA es muy rápido, lo que implica una respuestarápidadel sistema Las características de la válvula puedenasumirselinealesen la medidaque la rata de flujo a travésde ella varía directamentecon el desplazamiento del vastago. 100% abierta ~ 150gpm. La carreradel vástagoes de 1,5". Para el amolificador/controlador: Este Este maneja señalesestandaren un rango de 4~v. CuandoVM la salidadel controlador VSC = +48V, y Medidor de nuio: es un transductor e l1entaa 20 mA VSC = -48V raíz .r Este produce: 4 mA si el flujo es de O ~ valor nuncase alcanzaporqueel máximo Válvula de Control: La válvula abre vástagoa una velocidadde 1 pulglseg. moviendoseel respuestaeu en lieR.1f)O tieJD4i>O lteslJuestade la velocidad del motor de la válv..la. La respuesla .c6d - . ~ del del equipo equipo es es de de trtr = 5S! 5500 conjunto ptOlor-válvula, obtenida de las especificaciones 550 niseg. v - 9OK - ----tr= tiempo tomado por el vástago para tr= tiempo tomadopor el vástagop..a - pasardel del10% 10% - 90% 90%de desu sumáx. máx. pasar velocidad. velocidad.=55Omseg =550mseg 11M O t t;;z figura :2 Velocidaddel vástago Velocidaddel vástago 550 mIes. -trEsuecificacionesde control I-Se deseaque el sistemapasede 20gpma lOOgpm, (80gpl11=8mA). La válvula deberá permitir a lo mástardar de I seBoun nujo de 100gpm ,lo que implica que t. es llteIIOro igual que 1seB. 22- t,:s 7oom.reg 3- Mp(%):S10% 4- fJ :S200m.feg. 5- A1F~ 60° Donde tcl: tiempo para alcanzarel 50% del valor en estadoestacionario. t...: lien~popara alcanzarel 100% de1' valorenestadoestacionario. ts: tiempo de estalJlecimielllo. . .11 /. . /' /1 10 . . I ': J 1. 41 . / 20 10 - . / / . ' I f I :0.1 ~td . . I . I 00 . . I i1 1.5 2 U ..:~ -,.r ~ . t. tt If*,~ U!*'~ tt\~ \~ c.,.tu~ e..~ ("~t4nto SOLUC~ Figura 3: Diagramade bloquesde control de flujo Los pasossiguientesseavocanal cálculo de cadauna de las funcionesde transferencia del diagramade bloquesde la figura 3. Ganancia Kc.Kl del amplificador- controlador (span) E\~fI'plificador/controlador serepresentapor el producto de gananciasKc.KI. La ganada del amplificador Kc, secalculasegúnla ecuaciónque se muestraa continuación: 48 Kc o = 16mA 48V -- 3V/ /mA 4 La gananciadel controladorK 1, sedejaigual a K 1 = 1 por los momentos. Parámetros del motor . Ganancia del motor Kmv - . lpulgl ses o 020833pulg/ 48V l/V 48V' 7V. .seg Cálculo de Tm : seobtienea partir de la fig ura 2 dondetr = 550 mseg. En h la respuestadel sistemaes : para90% En tila respuestadel sistemaes: para 10% 1- e-11//T.. 1- e-11;' i'r.. Relacionandoa ambas 1/9= e-(11-11)I Tm O 111 = e~U.sITm , entonces Tm=O,25seg. Parámetros de la válvula . Cálculo de Kr : serelacionael desplazamientodel vastagocon la rata de flujo de salida. Kr= 150gpm =.100 1,5plllg gpm/pulg Parámetros del transductor diferencial de presión . Cálculo de KT : gananciadel medidorde flujo 16mA = 0,1 mA/gpm KT= 160gpm Sustituyendotodos los parámetrsoencontrados,seconstruyeel diagramade bloquesde control mostrado en la figura 4. Q(I) Figura 4. Diagrama de bloques de control Función de transferencia de lazo abierto (FILA) .. 0,624 FTLA: G(jw) H(jw)= jw(O,25jw + 1) (1) Función de transferencia de lazo cerrado (FfLC) 25 FTLC: Q(s) (2) Respuestatemporal a lazo cerrado R(s) =8/s por)o que 200 Q(s)= = S(S2+4s+2,5) 200 ~~s+O,775)(s+3,225) q.(t)= 80+25,31e-3,22St-lO5,3e.o.77s (3) (4) . q(t)= q (t)+ 20gpm. Step (5) Auto-Scale Graph Figura 6 : Respuestatemporaldel sistemaa lazo cerradocon KI = 1 Situaciónde los parámetros, obtenidos de las figuras 5 y 6. DISEÑO DE CONTROLADORES Se debedecidir qué tipo de controlador se emplearáde manerade alcanzarlas especificaciones: P? PI? PD? PID? Análisis: - EliminamosPI porque el sistemaen estudio es del Tipo 1 y excitamoscon un escalón, por lo que ess=O - Empezamoscon control Proporcional (P) De los datosanterioresse deduceque tenemosa un sistemalento, por lo tanto aumentandola gananciaaumentamosla velocidadde respuestadel sistema. Retornandolas ecuacionesdel sistemaen estudio: R(s)=8/s O,(;z,tpK, FTLC= o 2512 + S + 200K. :. Q(s) = s(S2 +4s+2,SK.) O,624K, , w. =.J2,SK. rarseg y 4 ~= .JlOKt -DebemosevaluarK¡:. paravarios valoresde KI calculamosWn y -Sabemosque ~ optimos estánen el rango 0,4< ~ <0,8 ~ Figura 7. Respuestatemporalparavarios valoresde Kl. De la figura 7 se extraeque si aumenta Kl disminuye tr yaumenta Mp. -ts se excededel valor especificado. Si se construye el Bode de la FTLA= 6~S se encuentra que el jw(O,2Sjw+ 1) MF ==42° lo cual incumple con las especificaciones,entoncesnecesitamosun control adicional al P paraalcanzarespecificaciones. Se seleccionael P+D. Sedejaa K,=10 ya que el efecto derivativo D tiende a estabilizarel sistema. Figura 9: Diagrama de bloques de control con PD Recalculandolas correspondientesfuncionesde transferenciade lazo abierto y cerrado correspondientes, se obtiene: (6) FTLA GHc= O,832k](s+ 3kt / k) s(5+4) (7) FfLC= 1 8,32k)(S+ 3k1/ k]) s + (4 + 8,32k3)5+ 2,5k, (8) Wn= ..j23k.-5 (9) ~= 4 + O,833K) 2~2,5k1 Queremoscalcular kJ=T,¡/ / Paraello decimosque el cero de FTLA es s=a donde a= -3kdk3 => a=-30/k] :. ~= 4-2,5k,/a -- 4-2.Sk,/a . "2~2.Sk, .JlOO :O.4-2,5/a (11) Si suponemos ~=O,704 e igualamosa (11) encontramosque a ~ -.8,14 Y kJ ~ 3,7 Si graficamosla respuestaen tiempo con estosresultadosencontramos: una escalónde magnitud8 Y Kl=lO. De la figura 10 seextraenlos parámetros: t~O,2seg tr<O,7seg Mp<lO% . ts>lseg. Se intenta mejorar la respuestatemporal,de manerade ajustarsea las especificaciones, de maneraque los parámetrosquedancomo: Td=K3=5.5 td = 0.12 seg. tr= 0.59 seg. ts = 1 seg. Mp = 1.8470 a = - 5.45 rad/seg. ~ = 0.86 120 100 p E O- ,960 :S- u. 40 Sistema Original 20 O O 1 2 3 4 5 6 Tiempo Fig 11. Comparacióndel sistemasin compensar,con controladorP y controladorPD