Sistemas articulados. Teorema de Kempe
Anuncio

Rev. Semin. Iberoam. Mat. 4 fasc. II (2013) 19–53
Sistemas articulados. Teorema de Kempe
J.M. Aroca
Desde un punto de vista intuitivo un sistema articulado es un mecanismo
compuesto por barras rı́gidas unidas por sus extremos mediante articulaciones.
Como nuestro estudio es puramente geométrico y nos limitaremos a sistemas
articulados planos, suponemos que las barras son unidimensionales y que las
articulaciones les permiten girar con completa libertad en el plano. Si llamamos
vértices a los extremos de las barras, es claro que cada posición del sistema queda determinada por las posiciones de sus vértices, y como el sistema es plano,
es decir que todas las barras están situadas en un plano y están forzadas a
moverse en él, el conjunto de posiciones del sistema está parametrizado por un
subconjunto de R2n , siendo n el número de vértices del sistema, este conjunto se conoce por espacio de configuraciones del sistema articulado. De modo
inmediato se plantean dos preguntas sobre estos sistemas.
1. ¿Cuál es la geometrı́a del espacio de configuraciones de un sistema articulado?
2. ¿Cómo son las trayectorias de los vértices del sistema?
En este trabajo, puramente de revisión y sin pretensiones de originalidad, intentaremos analizar algunas de las respuestas que se han dado en los últimos
dos mil años a esas dos preguntas.
1.
Un poco de historia
Los primeros sistemas articulados, diferentes de la regla y el compás, de los
que se tienen noticias, se deben a los geómetras griegos del siglo V antes de
Cristo y estaban destinados a resolver algunos problemas relativos a cónicas y
otros asociados a ecuaciones de tercer grado insolubles con regla y compás. La
primera referencia clásica a un sistema dinámico de construcción de curvas es
la del sistema destinado a la construcción de la cuadratriz atribuido a Hippias
(460 − 400 a.C.). La cuadratriz es el lugar geométrico descrito por un punto
que gira en torno al origen con velocidad angular constante a la vez que se
mueve paralelamente al eje y, con velocidad constante (ver [13]). No existen
datos sobre un sistema articulado capaz de dibujar esta curva que se puede usar
para resolver los problemas de la cuadratura del cı́rculo y de la trisección del
ángulo. Parece ser que se dibujaba trazando una cantidad suficiente de puntos
de ella, ya que es fácil dar un método elemental para dibujar una familia densa
numerable de puntos de dicha curva.
19
20
Hay una interesante controversia entre los historiadores de la matemática
sobre la admisión en la geometrı́a griega de construcciones usando instrumentos
distintos de la regla y el compás, el lector interesado puede consultar el capı́tulo 8,2 Neusis- Constructions in Greek Geometry de la obra de Fowler [15], el
artı́culo de Zeuthen [41] y para el punto de vista opuesto el texto de Allman [3].
En este último se hace referencia a dos citas de Platón hechas por Plutarco:
We learn from Plutarch (Quaest. Conviv. lib. viii q. 2, I; Plut. Opera, ed Didot vol. iv p. 876) that “Plato blamed Eudoxus, Archytas, and Menaechmus, and
their School for endeavouring to reduce the duplication of the cube to instrumental and mechanical contrivances; for in this way the whole good of geometry is
destroyed and perverted, since it backslides into the things of sense, and does not
soar and try to grasp eternal and incorporeal images; through the contemplation
of which God is ever God”
La segunda cita, contenida en la Vida de Marcelo, está hecha esencialmente
en los mismos términos, pero añade que “aplican ciertos instrumentos para
calcular medias proporcionales a partir de lı́neas curvas y secciones”de este
modo, y eso es de la cosecha de Plutarco, substituyen lo que hay en la geometrı́a
de incorpóreo y sensible por una vulgar herramienta. De este modo, y vuelve
a ser opinión de Plutarco, Platón diferencia la mecánica de la geometrı́a y la
expulsa de ella, de este modo y al ser considerada durante mucho tiempo por
debajo de la filosofı́a, la mecánica se transforma en una de las artes de la guerra.
Sin embargo Fowler ([15] pp 286) dice no querer describir: Cómo de tenue
es la evidencia sobre la crı́tica que se dice hace Platón al uso de construcciones
mecánicas en geometrı́a y termina diciendo que todos los comentaristas modernos aceptan que en la geometrı́a griega se admitı́an construcciones mas generales
que las efectuadas con regla y compás. También pone en duda la autorı́a de un
aparato para duplicar el cubo atribuido por Eutocio (siglo IV después de Cristo)
a Platón, y la existencia de una misteriosa regla - cuerno citada por Diocles.
No se conocen con precisión los instrumentos de que disponı́an los griegos
para dibujar cónicas, Allman aventura la hipótesis, contradicha por otros autores, de que las pintaban por aproximación dibujando muchos de sus puntos.
Según cita Allman, tanto Bretschnaider como Cantor no consideraban improbable que Menaechmo dispusiera de algún instrumento para dibujar parábolas,
imprescindible para su solución del problema de duplicación del cubo por medio
de la intersección de dos parábolas. Sin embargo no hay referencias de sistemas
articulados capaces de dibujar cónicas hasta épocas muy posteriores. La primera
está en Proclo (418 - 485 d. C.) que habla de un compás para dibujar parábolas
de Isidoro de Mileto. Sı́ hay referencias en Eutocio y Proclo de dos aparatos, uno
de ellos el ya citado atribuido a Platón, y otro atribuido a Nicomedes (siglo III
a.C.) que son esencialmente sistemas mecánicos para el cálculo de raı́ces cúbicas
y tienen aplicación directa tanto a resolver el problema Deliano (la duplicación
del cubo), como el problema de la trisección del ángulo. Esos aparatos son los
que describimos a continuación.
1 Aparato atribuido a Platón
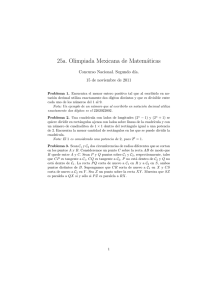
El aparato de la figura está descrito en [5, 3] y consiste en tres barras, dos
Rev. Semin. Iberoam. Mat. 4 fasc. II (2013) 19–53
21
J.M. Aroca
Figura 1: Aparato para resolver el problema Deliano, atribuido a Platón
de las cuales, α y β, están rı́gidamente unidas por un extremo formando
un ángulo recto, con vértice B, y la tercera γ se puede desplazar a lo
largo de β, a la que está unida por uno de sus extremos C, manteniéndose
paralela a α (ver figura 1). En cierto sentido es similar al compás y podrı́a
usarse, como este, para dibujar circunferencias.
En la figura citada se puede apreciar cómo se usa. Si queremos calcular la
raı́z cubica de d/a, es decir de la medida del segmento d tomando a como
unidad, en un sistema cartesiano se hace pasar la barra α por el punto
(−a, 0), y la barra γ por el punto (0, −d) y a continuación se desplaza la
barra β hasta que se colocan, el vértice C en el eje x (punto (c, 0)) y el B
alcanza el eje y (punto (0, b)).
La aplicación del teorema de la altura a los triángulos rectángulos ABC
y BCD establece que:
b2 = a.c
⇒ b4 = a2 .c2 = a2 .b.d ⇒ (b/a)3 = d/a
c2 = b.d
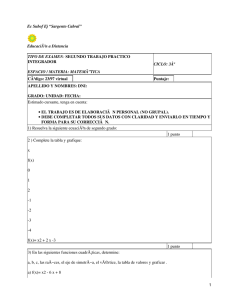
2 La conchoide de Nicomedes
Rev. Semin. Iberoam. Mat. 4 fasc. II (2013) 19–53
22
Figura 2: Aparato atribuido a Nicomedes
El sistema (ver figura 2) consta de tres barras, la barra β esta rı́gidamente
unida a la barra α en su punto medio formando con ella un ángulo de 90
grados y en ella hay un pivote fijo B, a distancia b de la intersección con la
barra α sobre el que desliza la barra γ, esta a su vez tiene otro pivote P a
distancia a de su extremo que encaja en una ranura de la barra α. De este
modo el extremo X de la barra γ está situado en una recta variable por
B, de modo que la longitud del segmento de dicha recta contenido entre
X y la barra α es de longitud constante igual a a.
Tomando una referencia cartesiana centrada en B con eje de ordenadas
sobre β, la ecuación en polares de la conchoide, tomando ángulos a partir
del semieje x negativo es
b
+ a.
ρ=
sin ϑ
La ecuación cartesiana en la referencia fijada de la conchoide, que es una
cuártica, es
x2 (y − b)2 = y 2 (a2 − (y − b)2 .
La conchoide se puede usar en la resolución del problema de la duplicación
del cubo y en el de la trisección del ángulo, veamos como ejemplo la
resolución de este segundo problema.
Tomamos el ángulo θ a trisecar (ver figura 3) - supuesto que es agudo
\ para AC = 1 - tomamos una recta r ortogonal a AB por C y la
θ = BAC
conchoide γ de r respecto de A para a = 2. Tomamos por C la paralela a
AB que cortará a γ en E; AE corta a r en F y F E = 2. Si D es el punto
\
medio de EF , es ED = DF = 1. Como F
CE = π/2, EF es diagonal de
\
\ = α. Dado que α
un rectángulo y DC = 1; como AC = 1, ADC = DAC
Rev. Semin. Iberoam. Mat. 4 fasc. II (2013) 19–53
23
J.M. Aroca
r
2
F
C
β
1
α
A
β
F
B
β
γ
E
2
γ
Figura 3: Uso de la conchoide en la trisección del ángulo
es un ángulo exterior al triángulo CDE, es α = 2β y como θ = α + β, es
θ = 3β, luego hemos trisecado el ángulo θ. Los griegos, a esta técnica de
mover inclinaciones la llamaron vergeris.
La cisoide, atribuida a Diocles, es una curva cúbica de construcción similar
a la conchoide y con las mismas aplicaciones, y resulta fácil diseñar un aparato
que la dibuja, pero no hay referencias históricas de un aparato de este tipo hasta
el siglo XVII, como veremos en la sección siguiente.
2.
De las cónicas a las transformaciones cuadráticas
Hay referencias a un elipsógrafo atribuido por Chasles a Proclus (ver Blake
[4]), este mismo aparato ha sido atribuido a Leonardo de Vinci por diversos
autores (Braunmühl [5] o Rouse Ball [31], por ejemplo) y consiste en dos barras
rı́gidamente unidas con dos ranuras por las que deslizan dos pivotes de una
tercera barra. Cualquier punto rı́gidamente unido a esta tercera barra describe
una elipse. Un cálculo elemental con coordenadas prueba que se dibuja la elipse
centrada en O con semiejes BC y AC (ver figura 4).
Tanto Leonardo como Durero diseñaron aparatos para ayudarse en el trazado
de óvalos, por ejemplo el de la figura 5, pero estos aparatos, desde nuestro punto
Rev. Semin. Iberoam. Mat. 4 fasc. II (2013) 19–53
24
Figura 4: Elipsógrafo atribuido a Proclus y Leonardo de Vinci
de vista de sistemas articulados, son sistemas libres que recorren toda una región
del plano.
Figura 5: Aparato diseñado por Durero
Nos remontaremos ahora al siglo XVII, en el que la publicación de la Geometrı́a de Descartes [12], en la que se describe la construcción de varias curvas
algebraicas, vuelve a dar interés a los aparatos para la construcción de curvas. Pese a describir numerosas curvas como lugares geométricos, Descartes solo
menciona dos aparatos, uno de ellos destinado a la construcción de elipses usando una cuerda y otro con un doble propósito que es el que aparece en la figura 6.
Consiste en dos barras Y Z, Y X que se articulan en Y el punto B está fijo pero
todos los demás son móviles, manteniéndose únicamente la ortogonalidad de las
barras transversales bien a Y Z, bien a Y X. Como el propio Descartes señala en
dos puntos diferentes de su obra, el aparato tiene una doble aplicación:
Rev. Semin. Iberoam. Mat. 4 fasc. II (2013) 19–53
25
J.M. Aroca
Figura 6: Aparato diseñado por Descartes
1. Los triángulos ABC, ACD, ADE, AEF, AF G, AGH son semejantes y
en consecuencia se tiene la proporción continua:
CD
DE
EF
FG
BC
=
=
=
=
.
CD
DE
EF
FG
GH
Por tanto este aparato proporciona raı́ces cúbicas y se puede usar para la
duplicación del cubo y la trisección del ángulo.
2. El punto B describe una circunferencia pero los puntos D, F y H describen
\
curvas progresivamente más complicadas. Si llamamos θ al ángulo ZY
X
y a = Y B, la ecuación en polares de la curva descrita por D es:
Y D = a + BD = a + BC tan θ = a + a tan2 θ
Es decir es la curva cuártica, muy parecida a la cuadratriz:
y 4 = a2 (x2 + y 2 ).
Un seguidor de Descartes, Franz von Schooten el joven (1615 - 1668), presenta numerosos aparatos para dibujar cónicas en su tratado “De organica conicarum sectionum in piano descriptione tractatus”publicado en 1675, el primero
de ellos (ver figura 7), aunque es aparentemente diferente del de Proclus - Leonardo de Vinci, está basado en el mismo principio. Si tomamos dos barras de la
misma longitud OP y P Q articuladas en P y sujetas por O a una barra fija por
la que desliza Q, cualquier punto X de la barra P Q, diferente de sus extremos,
describe una elipse. En efecto, si situamos una barra virtual ortogonal a la OP
en 0 y añadimos otra barra virtual idéntica a la P Q a partir de P , tenemos el
primer elipsógrafo, la barra de longitud fija 2a que se apoya en dos barras fijas.
También se debe a von Schooten un hiperbológrafo que ya está basado en la
descripción de la hipérbola como lugar geométrico de los puntos cuya diferencia
Rev. Semin. Iberoam. Mat. 4 fasc. II (2013) 19–53
26
Figura 7: Primer elipsógrafo de von Schooten basado en el mismo principio del
de Proclus-Leonardo
Figura 8: Hiperbológrafo de von Schooten basado ya en la definición habitual de
hipérbola
Rev. Semin. Iberoam. Mat. 4 fasc. II (2013) 19–53
27
J.M. Aroca
Figura 9: Casos no degenerados del teorema de von Schooten
de distancias a dos fijos es constante. En el aparato (ver figura 8) los puntos A
y B son fijos, la distancia AB coincide con P Q y AP = P Q, entonces M es el
punto medio de los dos segmentos AB y P Q, en consecuencia:
XP = XQ
y
XA − XB = XA − XP = AP
y el punto X traza una hipérbola.
Von Schooten construye también tres tipos de compases deslizantes basados
en el siguiente resultado elemental:
Teorema 1.– Von Schooten. Si un rombo articulado ABCD tiene fijo el
punto A y el punto C se mueve en una circunferencia de radio r centrada en
otro punto fijo O, el punto de corte de la recta OC con la diagonal del rombo
BD describe una cónica. Esa cónica es una elipse si r < OA, es una hipérbola
si r > OA y degenera en un punto si r = OA. Si C describe una recta (que
se puede considerar como una circunferencia de radio infinito), P describe una
parábola.
Al estar situado P sobre la diagonal BD del rombo P C = P A se pueden
dar tres casos (ver figura 9);
1. Si r > OA, P está siempre entre O y C y:
P O + P A = P O + P C = OC = r,
por tanto P describe una elipse.
2. Si r < OA, C está siempre entre O y P y:
P O − P A = P O − P C = OC = r,
por tanto P describe una hipérbola.
Rev. Semin. Iberoam. Mat. 4 fasc. II (2013) 19–53
28
Figura 10: Compases deslizantes (conicógrafos) de von Schooten
3. Si r = OA, OA = OC ⇒ O ∈ BD ⇒ P = OC ∩ BD = O y P no se
mueve.
En el caso en que C describa una recta Γ, que se puede considerar una circunferencia de radio infinito con centro en el punto del infinito de la perpendicular a
Γ por A, la recta OC es la perpendicular a Γ por C y si P es el punto de corte
de OC con la diagonal BD, como P está en la diagonal BD es P C = P A y
como P C es perpendicular a Γ, es:
dist(P, Γ) = P C = P A
y en consecuencia P describe una parábola.
En la figura 10 se pueden ver los conicógrafos construidos por van Schooten
aplicando el teorema anterior.
Isaac Newton (1642 - 1727) describe en su Enumeratio Linearum Tertii Ordinis [28] setenta y dos tipos de curvas de tercer grado, de entre ellas destacaremos
la estrofoide por sus conexiones con la cisoide de Diocles a la que ya hemos hecho referencia. Según R. Clare Archibald [6], el primero que estudió esta curva
fue Isaac Barrow (1630 - 1677), maestro de Newton, aunque el nombre se debe a
Montucci ya en el siglo XIX. Barrow describe la estrofoide de la forma siguiente:
Dados un punto O y una recta r que no pasa por O, una recta variable s
por O corta a r en un punto Os , si O′ es el pie de la perpendicular a r por
O, se toman los puntos Xs , Ys sobre s tales que Os Xs = Os Ys = Os O′ . El
lugar descrito por los puntos Xs e Ys es la estrofoide (ver figura 11).
La ecuación de la estrofoide es fácil de obtener, en coordenadas polares con polo
O, semieje positivo OO′ y unidad de longitud OO′ son:
ρ = OYs = OOs − Os Ys = OOs − Os O′ =
1
− tan α.
cos α
Rev. Semin. Iberoam. Mat. 4 fasc. II (2013) 19–53
29
J.M. Aroca
Figura 11: Cisoide, estrofoide y fundamentación del sistema articulado de Newton que las dibuja
Al pasar a implı́citas, teniendo en cuenta los dos puntos Xs , Ys se obtiene:
y
x = ρ cos α = 1 ± sin α = 1 ± ⇒ ρ(x − 1) = ±y ⇒ (x2 + y 2 )(x − 1)2 = y 2 .
ρ
La ecuación es divisible por x y llevando el origen a O′ resulta:
y 2 (1 + x) − x2 (1 − x) = 0.
La cisoide de Diocles tiene también una descripción clásica (ver figura 11):
Dado un punto R en una circunferencia Γ, se toma la recta r tangente a Γ
en el punto diametralmente opuesto a R, una recta variable s por R corta
a r en un punto Bs y a Γ en un segundo punto As , el lugar de los puntos
−−−→ −−→
Xs tales que As Bs = RXs .
De nuevo en polares, con origen en R semieje positivo RP y unidad RP , la
ecuación de la cisoide es:
1
ρ = RXs = As Bs = RBs − RAs =
− cos α.
cos α
Rev. Semin. Iberoam. Mat. 4 fasc. II (2013) 19–53
30
Figura 12: Reproducción del sistema articulado de Sturm y de su fundamento
teórico
y en la referencia cartesiana con origen en R y la orientación usual, la ecuación
implı́cita es:
x3 + y 2 (x + 1) = 0.
En 1689 J.Ch. Sturm (1635 - 1703), en su Mathesis Enucleata [37], describe
un sistema articulado para dibujar la cisoide (ver la figura 12). Manteniendo su
−−→
−−→
notación, el punto H está en las cisoide de vértice D si y solo si DH = F P ,
por proyección sobre el eje x, esto sucede si y solo si DG = KC y por simetrı́a
de la circunferencia, esto es equivalente a GE = KF . Entonces, en el sistema
articulado de Sturm, las barras [DF ] y [CE] están forzadas a cortarse en el eje
y, el punto E está forzado a moverse en la circunferencia y la barra [EG] se
mantiene perpendicular al eje x, de este modo el punto H de corte de las barras
[EG] y [DF ] describe la cisoide.
Newton citó la cisoide en su Arithmetica Universalis [28], como un ejemplo
del uso de curvas, por parte de los matemáticos clásicos griegos, para resolver
problemas de tercer grado. De nuevo la citó junto con la estrofoide en su Enumeratio Linearum Tertii Ordinis [26] y diseñó un aparato muy simple para dibujar
ambas curvas (ver figura 13).
El sistema de referencia [EF GH] está formado por dos barras fijas ortogonales [EF ] y [GH]. La parte móvil está formada por dos barras rı́gidas formando
ángulo recto, [AB] y [BC], este sistema se mueve de modo que el vértice A
recorre el eje [EF ] y la barra [BC] pasa por un punto fijo D de la barra [GH]
tal que HD = AB, entonces el punto B describe la estrofoide y el punto medio
M de la barra [AB] describe la cisoide. Algunos autores llaman estrofoides a
todas las curvas descritas por los puntos de la barra [AB].
El fundamento del sistema está en la parte izquierda de la figura 11, en lugar
de una prueba usando geometrı́a clásica, fácil pero más larga, podemos deducir
directamente las ecuaciones:
Rev. Semin. Iberoam. Mat. 4 fasc. II (2013) 19–53
31
J.M. Aroca
Figura 13: Sistema articulado de Newton y dibujos de la cisoide y la estrofoide
Para la curva trazada por Q (parte superior de la figura 11), tomando
OA = P Q = 1 es:
x
x =
sin θ
⇒ y = (1 − x) √
⇒ y 2 (1 + x) = x2 (1 − x)
y = (1 − x) tan θ
1 − x2
y la curva es la estrofoide.
Para la curva trazada por Q en la parte inferior de la figura 11. Los
triángulos (P OS) y (AT S) son iguales, luego OS = ST y al ser Q y R los
puntos medios de los segmentos de longitud 1, [P T ] y [OA], SQ = SR y
[ = SRQ
[ y llamando α a este ángulo, es OSP
[ = 2α,
en consecuencia SQR
y en consecuencia θ = π/2 − 2α. Entonces las ecuaciones de la curva
ası́ construida son:
)
x = 21 − 12 . sin θ = 21 (1 − cos(2α)) = sin2 α
⇒ y 2 (1−x) = x3
y =
x tan α
=
x √sin α
1−sin2
y la curva es la cisoide.
Newton en sus Principia [27] dio una descripción orgánica de una cónica,
que es lo mismo que un sistema articulado para trazarla (ver la figura 14):
Dos ángulos de magnitud fija giran sobre dos pivotes situados en sus vértices.
Uno de los brazos del primer ángulo corta a uno de los brazos del segundo en
Rev. Semin. Iberoam. Mat. 4 fasc. II (2013) 19–53
32
Figura 14: Reconstrucción de un conicógrafo de Newton, junto al dibujo original
del texto de los Principia de 1687
un punto que traza una lı́nea recta, entonces el lugar de la intersección de los
otros dos brazos traza una cónica. (Libro I, Lema 21)
Desde la óptica de la geometrı́a proyectiva, el fundamento teórico de la construcción es simple (figura 14). Dentro de un haz plano de rectas de vértice P
la correspondencia gP,θ que asocia a cada recta la que forma con ella un ángulo
orientado fijo θ es una proyectividad, entonces, si los ángulos dados con vértices C y B son respectivamente α y β y si la recta descrita por el punto de
intersección de los dos primeros brazos es r, la composición de proyectividades:
gB,β πr gC,α , donde πr es la composición de la sección por r y la proyección desde
B, es una proyectividad entre los haces de vértices C y B, y los puntos de corte
de rayos homólogos forman una cónica.
Este lema tiene como consecuencia inmediata que por cinco puntos del plano
en posición general pasa una única cónica, resultado conocido, en la matemática
inglesa, por Teorema de Braikenridge - McLaurin. Tanto C. McLaurin (1698 1746) como W. Braikenridge (1700 - 1768) se adjudicaron este resultado y su
generalización en una agria polémica bien narrada en [35].
McLaurin (ver figura 12) considera un caso particular de la construcción de
Newton, con los ángulos α = β = π/2, con lo cual su construcción sigue siendo
métrica, pero prueba que si el punto de intersección de dos de los brazos recorre
una curva de grado d, el de los otros dos recorre una curva de grado 2d, es decir,
técnicamente se da cuenta de que está manejando una transformación cuadrática. Además observa que las cónicas transformadas de rectas son exactamente
las que pasan por tres puntos y que si transforma una cónica que pasa por los
vértices de los ángulos, el transformado es otra cónica más una recta doble.
Se pueden obtener las ecuaciones de la transformación. Si los ángulos tienen
como vértices O y P y elegimos una referencia métrica con origen en O y con
Rev. Semin. Iberoam. Mat. 4 fasc. II (2013) 19–53
33
J.M. Aroca
Figura 15: Sistema articulado de McLaurin, el transformado de una elipse es
claramente una curva de cuarto grado
−−→
OP de coordenadas (1, 0), X tiene de coordenadas (x1 , x2 ) y su transformado
Y , (y1 , y2 ), es:
−−→ −−→
−−→ −−→
OX ⊥ OY ⇒ OX.OY = 0
−−→ −−→
−−→ −−→
P X ⊥ P Y ⇒ P X.P Y = 0
En consecuencia se obtiene:
⇒ (x1 , x2 ).(y1 , y2 ) = 0 ⇒ x1 y1 + x2 y2 = 0,
⇒ (x1 − 1, x2 )(y1 − 1, y2 ) = 0 ⇒ x1 + y1 = 1.
y1
y2
=
=
1 − x1
x1 x2
x1 −1 ,
que corresponde a la transformación proyectiva involutiva:
β0 = α0 (α1 − α0 )
β1 = −(α1 − α0 )2
β2 =
α1 α2 .
Por el contrario, la construcción de Braikenridge (ver figura 16) es puramente
proyectiva. Por tres puntos fijos no alineados del plano B1 , B2 , B3 se hacen pasar
tres rectas variables r1 por B1 , r2 por B2 y r3 por B3 , llamamos A1 = r2 ∩ r3 ,
A2 = r1 ∩ r3 y A3 = r2 ∩ r1 y forzamos a A1 a recorrer una recta fija r que no
pasa por ninguno de los puntos fijos. Braikenridge prueba que si A2 recorre una
curva de grado d, A3 describe una curva de grado 2d
La prueba del resultado es también proyectiva, es claro que si A2 recorre una
recta s, tenemos una proyectividad del haz de vértice B1 en el haz de vértice B2
por sección con r proyección desde B3 , sección por s y proyección desde B2 y
los puntos A2 son las intersecciones de rayos homólogos en esta proyectividad,
luego describen una cónica. La transformación es pues cuadrática.
En términos analı́ticos, si elegimos una referencia de rectas:
R = {B2 + B3 , B1 + B3 , B1 + B2 , r}
Rev. Semin. Iberoam. Mat. 4 fasc. II (2013) 19–53
34
Figura 16: Transformación de Braikenridge
las coordenadas proyectivas de B1 , B2 , B3 son respectivamente [1, 0, 0], [0, 1, 0],
[0, 0, 1] y la recta r tiene la ecuación x0 + x1 + x2 = 0. Entonces. si A2 tiene
coordenadas [α0 , α1 , α2 ], r3 = B3 +A2 tiene por ecuación α1 x0 −α0 x1 = 0, A1 =
r3 ∩ r, tiene por coordenadas [−α0 , −α1 , α0 + α1 ], r2 = A1 + B2 tiene la ecuación
(α0 + α1 )x0 + α0 x2 = 0, y como r1 = A2 + B1 tiene la ecuación α2 x1 − α1 x2 = 0,
el punto A3 = r1 ∩ r2 tiene coordenadas [α0 α2 , −α1 (α0 + α1 ), −α2 (α0 + α1 )].
Luego las ecuaciones de la transformación son:
α0 α2
β0 =
β1 = −α1 (α0 + α1 )
β2 = −α2 (α0 + α1 ).
La transformación de McLaurin es la base para una nueva construcción
métrica de Victor Poncelet (1788 - 1867), que posteriormente generaliza a una
construcción puramente proyectiva de las transformaciones cuadráticas involutivas. La primera construcción de Poncelet (ver figura 17) parte de dos circunferencia exteriores una a la otra y asocia a cada punto X el punto de corte de
sus polares respecto a las dos circunferencias. Su construcción generaliza la de
McLaurin, que corresponde al caso particular de dos circunferencias de radio
cero, reducidas por tanto a sus centros. Posteriormente Poncelet substituye las
circunferencias por dos cónicas, y por la linealidad de la polar observa que la
correspondencia se puede asociar al haz de cónicas que generan dichas dos cónicas, de modo que define la correspondencia asociada a un haz de cónicas que
asigna a cada punto del plano la intersección de sus polares respecto a todas las
cónicas del haz, pero esta ya es otra historia.
Rev. Semin. Iberoam. Mat. 4 fasc. II (2013) 19–53
35
J.M. Aroca
Figura 17: Transformación de Poncelet
Figura 18: Mecanismo de Watt, en las proximidades de su centro traza aproximadamente una lı́nea recta
3.
¿Como dibujar una recta?
A.B. Kempe (1849 - 1922) publicó en 1877 un curioso libro, de cuyo tı́tulo
hemos sacado el de esta sección, en el que hace un estudio sistemático de algunos tipos de sistemas articulados. Observa en primer lugar que con sistemas
compuestos por una o dos barras, con solo un grado de libertad, solo se pueden dibujar cı́rculos y que los sistemas interesantes son ya los de tres barras, y
el primero de ellos el de Watt. El ingeniero J. Watt (1736 - 1819) patentó su
sistema articulado (ver figura 18) en 1784 como un mecanismo para producir
un movimiento paralelo a una dirección de referencia, esencial para controlar
el movimiento en lı́nea recta de un pistón. En su ancianidad lo consideraba su
invento más interesante:
Although I am not over anxious after fame, yet I am more proud of the
Rev. Semin. Iberoam. Mat. 4 fasc. II (2013) 19–53
36
Figura 19: Mecanismo de Evans, a la izquierda el transformado de una recta por
E, a la derecha el de una circunferencia
parallel motion than of any other invention I have ever made. (Carta de Watt
a su colega M. Boulton)
Y aunque se considera el primer método de dibujar aproximadamente un
segmento de recta, Watt nunca consideró que su invención, con enormes aplicaciones prácticas, estuviese destinada a ese fin.
En la misma lı́nea de simplicidad del mecanismo de Watt se encuentra un
mecanismo que genera un movimiento conocido por saltamontes, hay dudas
sobre la primera vez que se utilizó y sobre su autor, Ferguson [14] lo atribuye al
ingeniero inventor de la máquina de vapor de alta presión Oliver Evans (17651819).
El sistema articulado [EHN F ] (ver figura 19), está compuesto por dos barras, EH y N F articuladas en el punto medio H de N F y tales que EH =
−−→
−−→
N H = HF . Entonces HF = −HN y se verifica que:
−−→ −−→
−−→ −−→ −−→ −−→
−−→
−−→
EF .EN = (EH + HF ).(EH − HF ) = (EH)2 − (HF )2 = 0.
En consecuencia si F se mueve en una lı́nea recta que llega a E, N describe
la recta ortogonal a ella por E. Y es fácil ver que si F describe una circunferencia
de centro E, también lo hace N . Sin embargo la transformación que lleva F a
N no es lineal, un cálculo elemental en coordenadas lo demuestra, pero también
hemos incluido en la figura 19 la curva trazada por N cuando F recorre una
circunferencia que pasa por E.
Hay toda una serie de modificaciones y mejoras del invento de Watt, todas
aplicables a las máquinas de vapor, pero aparte hay otros que trazan exactamente una lı́nea recta, pero a los que se pueden poner objeciones prácticas:
Un ingeniero inglés, J. White [40], usa en 1798 las propiedades de la hipocicloide (ver la figura 20). Si una rueda de radio r gira sin deslizar dentro
de una circunferencia de radio 2r, el punto de la rueda que al iniciar el
movimiento está en contacto con la circunferencia exterior se mueve en
lı́nea recta. En efecto, al ser el radio de la circunferencia exterior doble del
Rev. Semin. Iberoam. Mat. 4 fasc. II (2013) 19–53
37
J.M. Aroca
Figura 20: Mecanismo de White, el punto X recorre el diámetro OA
d que coincide con la del arco XB
d
de la interior, la longitud del arco AB,
d
porque la rueda gira sin deslizar, corresponde a un ángulo α, y la del XB
a un ángulo de 2α, entonces:
−−→ −−→ −−→
OX = OC + CX = (r cos α, r sin α) + (r cos α, −r sin α) = (2r cos α, 0).
White recibió en 1801 un premio por su invento concedido por Napoleón
Bonaparte.
La segunda construcción permite trazar una recta pero en el espacio de
dimensión tres. Se debe a P.- F. Sarrus (1798 - 1861), que describe en
un artı́culo de los Comptes Rendues [32] un sistema articulado compuesto
por dos triángulos rectángulos isósceles rı́gidos de lados paralelos ABC,
A′ B ′ C ′ , unidos por dos pares de cuadrados rı́gidos [ABP ′ P ], [A′ B ′ P ′ P ],
y [BCQ′ Q], [B ′ C ′ Q′ Q], la figura está articulada a modo de bisagras en
AB, P P ′ , A′ B ′ , BC, QQ′ , B ′ C ′ , de este modo se garantiza que:
−→ −−→′ −−→′ −−′−→′ −−→ −−→′ −−→′ −−′−→′
AP = BP , P A = P B , BQ = CQ , QB = Q C ,
−−→ −−→′ −−′−→′ −−→ −−→′ −−′−→′
AB = P P = A B , BC = QQ = B C .
−−→
−−→ −−→′
−→
−−→ −−→
Además: AB = P P es ortogonal a AP y a P ′ A′ y lo mismo BC = QQ′
−−→
−−→
es ortogonal a BQ y a QB ′ . Entonces:
−−→′ −→ −−→′ −−→′ −−′−→′ −−→′
AA = AP + P A = BP + P B = BB
−−→
y ambos son ortogonales a AB, por la misma razón:
−−→′ −−→′ −−→
BB = CC ⊥ BC.
−−→′
Luego AA es siempre ortogonal al plano ABC y A′ se desplaza en lı́nea
recta.
Rev. Semin. Iberoam. Mat. 4 fasc. II (2013) 19–53
38
Figura 21: Mecanismo de Sarrus, el punto A recorre la recta AA′ ortogonal al
plano del triángulo
El principal protagonista de la búsqueda de la lı́nea recta durante el siglo
XIX fue el matemático ruso P.L. Chebishev (1821 - 1894), quien comenzó a
interesarse en el problema en 1853 tras un viaje a Francia y trabajó en el mismo
durante treinta años. Al parecer llegó a pensar que era imposible construir un
mecanismo que trazase exactamente una recta:
There is a persistent rumor that Professor Chebyshev sought to demonstrate
the impossibility of constructing any linkage, regardless of the number of links,
that would generate a straight line; but I have found only a dubious statement in
the Grande Encyclopédie of the late 19th century and a report of a conversation
with the Russian by an Englishman, James Sylvester, to the effect that Chebyshev
had “succeeded in proving the nonexistence of a five-bar link-work capable of
producing a perfect parallel motion...” (Ferguson [14])
La idea de Chebyshev era refinar el mecanismo de Watt para aproximar mejor la lı́nea recta, y el sistema a seguir fue combinar varios mecanismos de forma
que se compensaran los errores llegando a alcanzar desviaciones del orden de
10−13 . En la figura 22 se presenta una modificación de Chebishev del mecanismo
de Watt y una combinación de este mecanismo con el mecanismo de Evans. El
punto M recorre aproximadamente un segmento de recta, pero realmente es un
arco de una curva de grado cuatro, el punto Q transformado de M por el mecanismo de Evans recorre un arco de curva de grado ocho mucho mas próximo
a un segmento de recta.
El primer sistema articulado capaz de dibujar en el plano una lı́nea recta se
debe a C.N. Peaucellier (1832 - 1913) capitán de ingenieros del ejército francés
y antiguo alumno de la École Polytechnique. En una carta al editor de los
Nouvelles Annales de Mathématiques [29] define el compas composé, en esencia
el sistema articulado, y propone construir uno capaz de dibujar circunferencias
de gran diámetro, rectas y cónicas. De las últimas frases de su carta parece
deducirse que ya disponı́a del citado compás. Sin embargo no publica en la
Rev. Semin. Iberoam. Mat. 4 fasc. II (2013) 19–53
39
J.M. Aroca
Figura 22: Mecanismo de Chebyshev, lo mismo que el de Watt aproxima una
recta en una pequeña región
revista citada su modelo y la justificación geométrica del mismo hasta 1873 [30],
esto hace que algunos autores den la autorı́a del aparato a Y.T.L. Lipkin (1843
- 1875), pero los datos de Lemoine [24] zanjan la cuestión de modo definitivo:
Cette question a été communiquée, au nom du commandant Peaucellier, par
M. Mannheim, à la séance de la Société Philomathique de Paris du 20 juillet
1867. M. Peaucellier l’avait déjà posée dans les Nouvelles Annales de Mathématique, 2e série, t. III, p. 414, 1864; il en a, de plus, appliqué le principe à un
appareil pour mesurer les distances, qui se trouve décrit dans le Mémorial de
l’Officier du Génie, no 18, année 1868. Ces détails historiques sont nécessaires,
parce que M. Lipkin donne, en août 1871, le même théorème dans la Revue Universelle des Mines et de la Métallurgie de Liège, vol. XXX. (E. Lemoine [24]).
Ambos obtuvieron premios en su tiempo por el invento. Kempe [20] asegura
que:
His discovery (de Peaucellier) was not at first estimated at its true value, fell
almost into oblivion, and was rediscovered by a Russian student named Lipkin,
who got a substantial reward from the Russian Government for his supposed
originality. However, M. Peaucellier’s merit has at last been recognized, and he
has been awarded the great mechanical prize of the Institute of France, the “Prix
Montyon.”
El compas composé de Peaucellier, del que se presentan dos versiones en la
figura 23, es un aparato que reproduce la transformación geométrica llamada
inversión. Está formado por un rombo articulado con lados de longitud r en
los vértices [ACBD] con dos barras de igual longitud R articuladas entre si por
uno de sus extremos O y articuladas por el otro a vértices opuestos del rombo
C y D. De este modo el producto de distancias desde O a los vértices A y B es
la potencia de O respecto a la circunferencia de centro C y radio r y por tanto:
d = OA.OB = OE.OF = R2 − r2 .
Rev. Semin. Iberoam. Mat. 4 fasc. II (2013) 19–53
40
Figura 23: Dos formas del inversor de Peaucellier, la superior es un modelo del
Conservatoire National des Arts et Métiers y la inferior es una ilustración del
libro de Kempe
En consecuencia la transformación del plano que lleva el punto A al B es la
inversión de polo O y razón d y transforma las circunferencias que pasan por
O en rectas, luego añadiendo una nueva barra de longitud l con un extremo
articulado en un punto fijo a distancia l del punto O, también fijo, y con el otro
extremo articulado en A, se fuerza a A a recorrer una circunferencia por O y su
inverso B se desplazará a lo largo de una recta.
J.J. Sylvester (1814 - 1897) se entusiasmó con el inversor del que afirmaba
[38]:
The perfect parallel motion of Peaucellier looks so simple, and moves so easily
that people who see it at work almost universally express astonishment that it
waited so long to be discovered. But I wonder the more that it was ever found
out, and can see no reason why it should have been discovered for a hundred
years to come.
Además, y para poner de manifiesto las aplicaciones prácticas del aparato,
Sylvester señalaba que el célebre arquitecto Penrose habı́a fabricado una bomba
doméstica con un pistón controlado por un inversor y cuyo movimiento era
en perfecta lı́nea recta, y que del mismo modo se puede diseñar una cisterna
perfecta para el inodoro. También se usaba un inversor en:
certain machinery connected with some new apparatus for the ventilation
and filtration of the air of the Houses of Parliament. In due course, Mr. Prim,
Rev. Semin. Iberoam. Mat. 4 fasc. II (2013) 19–53
41
J.M. Aroca
Figura 24: Ventilador de la Cámara de los Comunes
(engineer to the Houses) was pleased to show his adaptation of the Peaucellier
linkage to his new blowing engines, which proved to be exceptionally quiet in
their operation. (Sylvester [38])
En los últimos años del XIX se inventan numerosas mejoras y variantes del
inversor, algunas tan complejas como un sistema articulado de Sylvester compuesto por 78 barras y capaz de trazar el segmento que une dos puntos dados.
Pero resulta especialmente interesante, sobre todo por sus aplicaciones integrado
en mecanismos más complejos, el inversor inventado por H. Hart (1848-1920).
El inversor de Hart es simplemente un antiparalelogramo (ver figura 25),
consta de 4 barras iguales dos a dos, de longitudes L y l < L, articuladas
en sus extremos formando un cuadrilátero no convexo [ABCD], los triángulos
[ADB] y [CBD] son iguales por tener los tres lados iguales, y en consecuencia
\ = DCB,
\ ABC
\ = ADC
\ y [ADE] = [CBE], [ADC] = [CBA]. Además los
DAB
triángulos [ODY ] y [ADC] son semejantes, como lo son los [OAX] y [DAB].
En consecuencia:
OY
OD OX
OA
OY OX
OD OA
=
,
=
⇒
=
.
AC
AD DB
AD
AC DB
AD AD
Los cocientes
OD
AD
=λy
OA
AD
= 1 − λ son fijos en el aparato. Y por el teorema
Figura 25: Inversor de Hart
Rev. Semin. Iberoam. Mat. 4 fasc. II (2013) 19–53
42
de Pitágoras:
2
2
2
2
2
2
l2 = BC = BP + P C , L2 = AB = AP + BP ,
luego
2
2
L2 − l2 = AP − P C = AC.DB
y por lo tanto
OX.OY = λ(1 − λ)(L2 − l2 ) = cte
y la transformación que lleva X a Y es una inversión.
En su artı́culo ya citado de los Nouvelles Annales [30], Peaucellier emplea
un argumento heurı́stico que abre la puerta, como conjetura, al impresionante
teorema de Kempe que será objeto de la próxima sección:
La ligne que parcourt un point quelconque guidé par une combinaison de
pièces articuleés est nécessairement algébrique. On conçoit que, réciproquement,
toute courbe algébrique puisse être engendrée à l’aide d’un systéme articulé convenablement choisi.
4.
El teorema de Kempe (Clásico)
A. B. Kempe (1849 - 1922) dio en 1875 una primera prueba (ver [19]),
con un error leve en la construcción de dos de los aparatos, de la conjetura
de Peaucellier. Su demostración es, como veremos a continuación, muy simple
desde el punto de vista conceptual pero enormemente complicada de llevar a
cabo en la práctica para representar curvas concretas. Kempe era consciente de
este hecho, hablando de su prueba escribı́a [19]:
... there is a way of drawing any given case; and the variety of methods of
expressing particular functions that have already been discovered renders it in
the highest degree probable that in every case a simpler method can be found.
There is still, therefore, a wide field open to the mathematical artist to discover
the simplest link-works that will describe particular curves
El enunciado del teorema es el siguiente:
Teorema 2.– Kempe. Dada una curva algebraica real plana f (x, y) = 0 y un
punto P de ella, existen un entorno Ep de P y un sistema articulado S tal que
mientras un punto de S recorre un segmento de lı́nea recta, otro punto de S
describe la intersección de la curva con EP .
La prueba del teorema se hace partiendo de la ecuación de la curva:
f (x, y) =
i+j=d
X
fij xi y j = 0,
i+j=0
haciendo un cambio de variables:
x =
y =
a cos ϕ + b cos ψ
a sin ϕ + b sin ψ,
Rev. Semin. Iberoam. Mat. 4 fasc. II (2013) 19–53
43
J.M. Aroca
donde las variables son ϕ y ψ y a y b son parámetros a fijar posteriormente, se
tiene:
0 = f (x, y) =
i+j=d
X
fij (a cos ϕ + b cos ψ)i (a sin ϕ + b sin ψ)j
i+j=0
=
i+j=d
X
fij
=
r
r=0
i+j=0
i+j=d
X
i X
i
fij
i+j=0
ar bi−r cosr ϕ cosi−r ψ
!
j X
j
s=0
s
as bj−s sins ϕ sinj−s ψ
!
i
j r+s i+j−r−s
s
j−s
r
i−r
a b
cos ϕ cos
ψ sin ϕ sin
ψ .
s
r
r=0,s=0
r=i,s=j
X
!
Podemos transformar esta fórmula usando las relaciones trigonométricas:
sin α = cos( π2 − α).
cos α cos β = 21 (cos(α + β) + cos(α − β)).
Para n impar:
n−1
2
2 X
n
cos α = n
cos ((n − 2k)α).
2
k
n
k=0
Para n par:
n
2 −1 2 X
1 n
n
cos α = n n + n
cos ((n − 2k)α).
2
2
k
2
n
k=0
Con ellas transformamos todas las funciones trigonométricas en cosenos y reducimos las potencias a cosenos de combinaciones lineales con coeficientes enteros
de ϕ, ψ y π/2 y reduciendo módulo π se obtiene una expresión del tipo:
f (x, y) = E +
X
1≤r+s≤d
Ars cos(rϕ + sψ) + Brs cos(rϕ − sψ)
π
π
+ Crs cos rϕ + sψ −
+ Drs cos rϕ − sψ −
2
2
= 0,
donde los coeficientes E, Ars , Brs Crs son polinomios en a y b. Se tata ahora de
construir un punto K cuya primera coordenada sea:
X
1≤r+s≤d
Ars cos(rϕ + sψ) + Brs cos(rϕ − sψ)
π
π
+ Drs cos rϕ − sψ −
= f (x, y) − E.
+ Crs cos rϕ + sψ −
2
2
Rev. Semin. Iberoam. Mat. 4 fasc. II (2013) 19–53
44
Figura 26: El transformador de coordenadas, transforma las coordenadas cartesianas en trigonométricas
Figura 27: Cuatro juegos de coordenadas trigonométricas del mismo punto
Recordemos que partı́amos de un punto C de coordenadas:
(x, y) = (a cos ϕ + b cos ψ, a sin ϕ + b sin ψ).
Entonces si el punto C recorre la curva f (x, y) = 0, la abscisa de K será E,
es decir al recorrer K la recta x = E, C recorrerá la curva f (x, y) = 0, y solo
queda explicar cómo construir K y cómo determinar los valores adecuados de a
y b.
Veamos en primer lugar los aparatos necesarios para construir K:
El transformador de coordenadas: Consiste en un paralelogramo articulado
[OACB] (ver figura 26) con un vértice fijo en el origen O y lados de longitudes
\ = ϕ, BOD
\ = ψ, las coordenadas de C
a = OA y b = OB, es claro que si AOD
son:
x
y
=
=
OE
EC
=
=
OD + DE
EF + F C
=
=
OA cos ϕ + AB cos ψ
OA sin ϕ + AB sin ψ
=
=
a cos ϕ + b cos ψ
a sin ϕ + b sin ψ
El problema es la no unicidad global de las coordenadas trigonométricas, en
la figura 27 se muestran cuatro juegos de coordenadas distintos para un mismo
Rev. Semin. Iberoam. Mat. 4 fasc. II (2013) 19–53
45
J.M. Aroca
Figura 28: El trasladador lleva el vector de origen A y extremo C a la posición
con origen en G
punto C. Es fácil apreciar que estas coordenadas corresponden a un cambio de
configuración del paralelogramo, y para cambiar de configuración el paralelogramo debe pasar por el alineamiento de sus cuatro vértices. Las situaciones de
alineamiento se producen cuando la distancia de C a O es a + b, o cuando es
b − a. Suponemos b ≥ a porque en caso contrario las coordenadas trigonométricas están definidas solamente si C está en una corona circular centrada el origen
O. Entonces el problema es únicamente elegir a y b para que el punto C, en
cuyo entorno queremos dibujar la curva, esté en el cı́rculo abierto de centro en
O y radio a + b y no esté sobre la circunferencia de centro en O y radio b − a,
estas lı́neas limitarán también el entorno del punto C en que podremos dibujar
la curva.
El trasladador: Es el sistema articulado que permite trasladar vectores, consta
de cuatro paralelogramos [ABED], [DEHG], [BCF E], [EF HI], cada dos de
ellos con un lado común, y tales que AB = BC (ver figura 28). Con ellos
está garantizado que:
−−→ −−→ −−→ −−→ −−→ −→
AB = DE = GH, BC = EF = HI
y, en consecuencia:
−→ −−→ −−→ −−→ −−→ −−→ −−→ −→ −→
AC = AB + BC = DE + EF = DF = GH + HI = GI.
De este modo, si queremos trasladar un vector v, basta colocar A en el origen
del vector y C en su extremo, lo cual es posible si |v| < 2AB. A continuación
llevamos G al nuevo origen, que debe estar situado a distancia menor que 2AD
−→
de A y el vector GI es el trasladado de v al punto G.
El problema, no previsto por Kempe, de esta construcción es que los paralelogramos pueden cambiar de configuración tal como señalamos al hablar del
transformador de coordenadas, pero se puede evitar este problema colocando
una barra intermedia en la forma representada en la figura 29.
El girador: El girador es un paralelogramo [ABCD] (ver figura 30) con dos de
Rev. Semin. Iberoam. Mat. 4 fasc. II (2013) 19–53
46
Figura 29: La colocación de una barra intermedia evita el cambio de configuración del paralelogramo
Figura 30: Girador
sus lados [AB] y [AD] ranurados, y una diagonal [AC] ranurada y fija en A, por
las ranuras de los lados deslizan cuatro barras con un punto común I forzado a
deslizar por la barra [AC], las barras [IE] e [IG], con los extremos E y G en el
lado [AB] y las barras [IF ] e [IH] con sus extremos F y H en la barra [AD],
verificando además que:
IE = IF , IG = IH.
Por simetrı́a
AG = AH, EG = F H,
por tanto el girador permite girar un vector con origen en A de módulo menor
o igual que AB cualquier ángulo, sin más que desplazar el vértice I hasta que
\ sea el
H se sitúe en el extremo del vector y luego desplazar C hasta que DAB
Rev. Semin. Iberoam. Mat. 4 fasc. II (2013) 19–53
47
J.M. Aroca
Figura 31: Duplicador o reversor de ángulos y triplicador
−→
ángulo deseado, ası́ AG será el vector girado. Del mismo modo se puede girar
\
cualquier segmento [F H] el ángulo DAB.
Los multiplicadores de ángulos: Los procesos de sumar ángulos y multiplicarlos por enteros se pueden efectuar por medio de giradores, pero hay otra
construcción por medio de antiparalelogramos que detallamos a continuación.
Los multiplicadores son cadenas de inversores de Hart semejantes, en la
figura 31 se representan un aparato para duplicar ángulos y otro que los triplica,
expliquemos el fundamento del primero:
Los antiparalelogramos [ABCD] y [ADEF ] (ver figura 31) están enlazados
de modo que el vértice D es común y el lado [DC] del primero está sobre el
lado [DE] del segundo. Se han construido además para que sean semejantes, es
decir:
AB
AD
=
,
AD
DE
en consecuencia los triángulos [ABC] y [CDA] son iguales y semejantes a los
triángulos, también iguales, [ADE] y [EF A]. En consecuencia:
\ = ACB
\ = AED
\ = EAF
[
β = CAD
y por ser ángulos exteriores de triángulos
\ = AHD
\
2β = AGB
luego:
\ = DAF
\.
α = BAD
\
Y esta relación se mantiene para cualquier ángulo que se coloque en BAD
siempre que no varı́e la configuración del antiparalelogramo. Veremos luego cómo
evitarlo.
Rev. Semin. Iberoam. Mat. 4 fasc. II (2013) 19–53
48
Figura 32: El sumador de ángulos es un sistema de dos duplicadores con un lado
común
El triplicador sigue el mismo principio, basta enlazar al segundo antiparalelogramo un tercero en la misma forma en que enlazamos el segundo al primero.
Ası́ sucesivamente se pueden enlazar cualquier número de antiparalelogramos y
construir nα para cualquier ángulo α y cualquier entero n.
El sumador de ángulos: El sumador de ángulos es un sistema compuesto por
dos duplicadores: [AKLD], [AN M D] y [ABCD], [ADEF ] con un lado [AD]
común (ver figura 32). De esta forma:
\
\
\
β=N
MD = N
AD = DAK
\
\
\
α=F
ED = F
AD = DAB
y se obtiene:
\
\
\
\
α+β =F
AK = N
AB, α − β = F
AN = KAB.
El funcionamiento correcto de los sistemas que operan con ángulos requiere
evitar los cambios de configuración de los antiparalelogramos, para evitarlos hay
que añadirles cuatro barras articuladas en un vértice O y en los puntos medios
de los lados [OP ], [OQ], [OR], [OS] (ver figura 33), tales que:
OP = OS = r, OQ = OR = s.
En virtud del resultado probado al hablar del inversor de Hart, teniendo en
cuenta que P y S son ahora los puntos medios de los lados, la razón de la
inversión asociada con centro P (o con centro S) es
ρ=
1 2
(L − l2 ), l = AB, L = BC.
4
Rev. Semin. Iberoam. Mat. 4 fasc. II (2013) 19–53
49
J.M. Aroca
Figura 33: Se puede evitar que el antiparalelogramo cambie de configuración
Además por ser rectángulos los triángulos [OT Q], [OT P ] es:
2
2
2
2
2
2
r2 = OP = OT + T P , s2 = OQ = OT + T Q ,
restando ambas igualdades:
2
2
r2 − s2 = T P − T Q = (T P + T Q)(T P − T Q) = P R.P Q = ρ
P, Q, R, S están siempre alineados
P QP R = SRSQ =
L2 −l2
4
= r 2 − s2
La posición lı́mite, que no se puede sobrepasar sin que se tenga la posibilidad de
cambiar de configuración, se alcanza cuando los cuatro vértices están alineados,
esta posición es accesible si:
2r ≥ L + l, 2s ≥ L − l.
Por tanto para que no sea accesible esta posición limite:
2r < L + l, 2s < L − l.
Entonces basta con construir las barras con esta propiedad (de hecho basta con
la condición sobre s para que no haya problemas).
Una vez construidos estos sistemas articulados la construcción de Kempe
resulta evidente. Se trata de construir un vector, a partir del punto dado P de
la curva cuya abscisa sea:
(∗)
X
1≤r+s≤d
Ars cos(rϕ + sψ) + Brs cos(rϕ − sψ)
π
π
+ Drs cos rϕ − sψ −
.
+ Crs cos rϕ + sψ −
2
2
Procedemos en las etapas siguientes:
Rev. Semin. Iberoam. Mat. 4 fasc. II (2013) 19–53
50
Construimos un transformador de coordenadas [OAP B] con origen en O
y extremo en P , si E es un punto del semieje positivo de abscisas, los
ángulos de partida son:
\ = ϕ, EOB
\ = ψ,
EOA
a y b se eligen, como dijimos antes, en función del entorno de P en que se
quiere dibujar la curva.
Construimos multiplicadores de ángulos para ϕ, partiendo de [OA] para
todos los múltiplos de ϕ que aparecen efectivamente (es decir con coeficiente distinto de cero) en (∗), y lo mismo para [OB] y ψ, hay que tener en
cuenta que si los dos lados iniciales de un multiplicador tienen longitudes
u y v y u/v = t > 1, la longitud del lado del n-ésimo antiparalelogramo
es tn−1 v.
Con los sumadores construimos para cada par (r, s) con coeficiente Ars ,
Brs , Crs , Drs no nulo vectores
ars , brs , crs , drs
respectivamente, sobre las rectas por el origen que formen ángulos:
rϕ + sψ, rϕ − sψ, rϕ + sψ −
π
π
, rϕ − sψ −
2
2
respectivamente con el semieje positivo de abscisas, si el coeficiente es
−−→
positivo de modo que el ángulo orientado con el vector OE sea el dado y
si es negativo que el ángulo sea el dado más π.
Construimos en la dirección de esos vectores barras de longitudes |Ars |,
|Brs |, |Crs |, |Drs |.
Con trasladadores vamos llevando las barras una a continuación de otra y
el extremo final es el punto buscado.
El proceso es enormemente complicado, en [33] se puede ver la construcción detallada del sistema articulado que dibuja una cónica, de modo que se
comprende la frase ya citada de Kempe:
... renders it in the highest degree probable that in every case a simpler method can be found
que deja abierto un interesante problema.
Referencias
[1] Abbot M.T. Generalizations of Kempe’s universality theorem. M.I.T. 2008.
Rev. Semin. Iberoam. Mat. 4 fasc.˜II (2013) 19–53
51
J.M. Aroca
[2] Artobolevskii I.I. Mechanisms for the generation of plane curves Pergamon.
Oxford 1964 (Traducción de un original ruso de 1959).
[3] Allman G.J. On Greek Geometry from Thales to Euclid. Dublin Univ. Press,
Dublin 1887.
[4] Blake E.M. The ellipsograph of Proclus. American Journal of Maths. 22,
1900 pp 146-153.
[5] Braunmühl A. Historische Studie über die organische Erzeugung ebener
Curven von den altesten Zeiten bis zum Ende des achtzehnten Jahrhunderts. in Dyck W. Katalog.... pp 54 - 88.
[6] Clare Archibald R. Outline of the History of Mathematics. The Lancaster
Press, 1932.
[7] Coolidge J.L. A History of Geometrical methods. Dover, New York 1963
(Reimpresión de un texto de Clarendon, Oxford 1940).
[8] Darboux G. Recherches sur un système articulé. Bull. Sci. Mathem. et Astr.
Tome III, n.1 1879.
[9] Darboux G. Sur un nouvel appareil á ligne droite de M. Hart. Bull. Sci.
Mathem. et Astr. Tome III, n.1 1879.
[10] Darboux G. De l’emploi des fonctions elliptiques dans la theorié du cuadrilatère plan. Bull. Sci. Mathem. et Astr. Tome III, n.1 1879.
[11] Demaine D., O’Rourke J. Geometric folding algorithms. Cambridge Univ.
Press, Cambridge 2007.
[12] Descartes R. La Géométrie (1637). Edición de A. Hermann Paris 1886 (ebook Proyecto Gutenberg 2008).
[13] Dyck W. Katalog mathematischer und mathematisch-physikalischer Modelle, Apparate und Instrumente. Deutsche Mathematiker -Vereinigung, M K.
Hof Universitatsbuchdruckerei von Dr. C. Wolf und Sohn. München 1892.
[14] Ferguson F. Kinematik of mechanisms from the time of Watt. Contributions from the Museum of History and Technology. Paper 27. Smithsonian
Institution, Washington D.C. 1952.
[15] Fowler D. The Mathematics of Plato´s Academy. Clarendon Press, Oxford
(1999).
[16] Gao X.-S., Zhu G.-C., Chou S.-C., Ge J.-X. Automatic generation of Kempe
linkages for algebraic curves and surfaces. Mechanism and Machine Theory
36 (2001).
[17] Kapovich M., Millson JJ. Universality theorems for configuration spaces of
planar linkages. Topology 41 (6) 2002.
Rev. Semin. Iberoam. Mat. 4 fasc.˜II (2013) 19–53
52
[18] Heath T.L. A History of Greek Mathematics. Vol I, vol. II. Oxford Univ.
press. Reprinted by Dover New York 1921.
[19] Kempe A.B. On a General Method of describing Plane Curves of the nth
degree by Linkwork. Proc. London Math. Soc. (1875) s1-7(1): 213-216.
[20] Kempe A.B. How to draw a straigth line. Mac Millan London 1877 (Proyecto Gutemberg [EBook num. 25155]).
[21] King H.C. Planar linkages and algebraic sets. Turkish J. Math. 23 (1) 1999.
[22] Koenigs G. Leçons de Cinematique. Hermann Paris 1897.
[23] Lebesgue H. Leçons sur les constructions géométriques. Gauthier Villars,
Paris 1950 (reimpreso J. Gabay, Paris 1987).
[24] Lemoine E. Note sur le losange articulé du Commandant du Génie Peaucellier destiné a remplacer le Parallélogramme de Watt. Journal de Physique 1873. Article published online by EDP Sciences and available at
http://dx.doi.org/10.1051/jphystap:018730020013001.
[25] Liguine V. Liste des travaux sur les Systèmes Articulés. Bulletin des sciences mathématiques, vol. 7, 1883.
[26] Newton I. Arithmetica Universalis (1707). Traducción inglesa de W. Whiston Universal Arithmetik. London 1778.
[27] Newton I. Philosophiae Naturalis Principia Mathematica. S. PEPYS, Reg.
Soc. Cambridge 1686 (Proyecto Gutemnberg 2008). Trad. española Principios matemáticos de la Filosofı́a natural. Ediciones Altaya, Barcelona, 1993
[Estudio preliminar y traducción Antonio Escohotado].
[28] Newton I. Enumeratio Linearum Tertii Ordinis. H.G. Bohn London 1870
(digitalizado por Google).
[29] Peaucellier C.- N. Correspondance. Lettre de M. Peaucellier, capitaine de
Génie. Nouvelles Annales de Mathématiques, 2a série, vol. 3, 1884.
[30] Peaucellier C. - N. Note sur une question de geométrie de compas. Nouvelles
Annales de mathématiques, vol. 12, série2, 1873.
[31] Rouse Ball W.W. A short account of the History of Mathematics. Dover
Pub. New York (1960).
[32] Sarrus J. P. C.R. Acad. Sci. Paris Vol36, 1853, pp 1036 - 1038.
[33] Saxena A. Kempe’s Linkages and the Universality Theorem. Resonance,
Marzo 2011.
[34] Snyder V. et al. Selected topics in Algebraic Geometry. (Informe del Comité de Transformaciones racionales (1928) del National Research Council
de Estados Unidos) Chelsea, New York 1970.
Rev. Semin. Iberoam. Mat. 4 fasc.˜II (2013) 19–53
53
J.M. Aroca
[35] St.
Andrews
University
webpage
andrews.ac.uk/Biographies/Braikenridge.html.
www-history.mcs.st-
[36] Smith D.E. History of Mathematics. Vol 2. Dover New York 1958 (Reimpresión de un original de 1925).
[37] Sturm J.C. Mathesis Enucleata. W. Mauriti 1711. (Libros Google).
[38] Sylvester J.J. Recent Discoveries in Mechanical Conversion of Motion. Notices of the Proceedings of the Royal Institution of Great Britain, 1873-1875,
vol. 7.
[39] Taimina
D.
Historical
Mechanisms
for
Drawing
Curves.
http://dspace.library.cornell.edu/bitstream/1813/2718/1/2004-9.pdf.
[40] White J. A new Century of Inventions. Manchester 1822.
[41] Zeuthen H.G. Die geometrische Construction als Existenzbeweis in der antiken Geometrie. Math. Annalen 47 1896 pp 222-228.
[42] Zeuthen H.G. Histoire des Mathématiques dans l’Antiquité et le moyen Age.
Gauthier-Villars Paris 1902.
Rev. Semin. Iberoam. Mat. 4 fasc. II (2013) 19–53