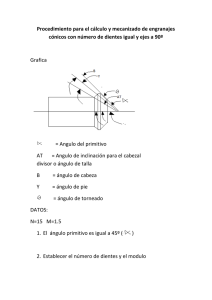
El Angulo Sólido y algunas de sus aplicaciones
Anuncio

El Angulo Sólido y algunas de sus aplicaciones 2016 Actualización # 14 (02/05/16). Desde el 2015 (EN REDACCION Y REVISION) Colección Soldovieri de textos de Ciencia NUEVO SOLDOVIERI Un texto bastante completo sobre un tema poco documentado para cátedra. VILORIA LA UNIVERSIDAD DEL ZULIA ADVERTENCIA TEXTO EN REDACCION Y REVISION ACTUALIZACIONES PERIODICAS EN www.cmc.org.ve/tsweb DEJA TUS COMENTARIOS EN EL LIBRO DE VISITAS DE ESTA WEB SOLDOVIERI C., Terenzio - Tony Viloria Avila. Por Terenzio Soldovieri C. fecha 13:56 , 02/05/2016 ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES 1era edición (preprint) (EN REDACCION Y REVISION) Comenzado en el 2015 - Actualización # 14 (02/05/2016) Escrito usando LATEX Copyright c 2016 Terenzio Soldovieri C. & Tony Viloria Avila. ? ? ? ? ? ? ?? Soldovieri C., Terenzio Profesor Agregado Centro de Modelado Científico (CMC) Departamento de Física Facultad Experimental de Ciencias (FEC) La Universidad del Zulia (LUZ) Maracaibo, Estado Zulia República Bolivariana de Venezuela [email protected] - [email protected] PIN: 568EEB0F www.cmc.org.ve/tsweb +584124271575 Deja tus comentarios en el libro de visitas de mi web! VILORIA AVILA, Tony Profesor Titular Laboratorio Teórico Experimental de Ciencias Cuánticas (LabTECC) Departamento de Física Facultad Experimental de Ciencias (FEC) La Universidad del Zulia (LUZ) Maracaibo, Estado Zulia República Bolivariana de Venezuela [email protected] Colección Soldovieri de textos de Ciencia. Copyright c 2016 Soldovieri C., Terenzio & Viloria Avila, Tony. Todos los derechos reservados. Editorial: (por establecer) ISBN: (por establecer) República Bolivariana de Venezuela. Gráficos: Soldovieri C., Terenzio. Portadas: Soldovieri C., Terenzio. Escritura electrónica: Soldovieri C., Terenzio. Procesador: este libro fue elaborado usando LATEX. Web de Soldovieri C., Terenzio: www.cmc.org.ve/tsweb Colección Soldovieri de textos de Ciencia Física General - Una introducción a los Fluidos, Vibraciones y Termodinámica. Introducción a la Mecánica de Lagrange y Hamilton. Introducción a la Mecánica de Lagrange y Hamilton - Solucionario. El Angulo Sólido y algunas de sus aplicaciones. (Coautor) La Transformación de Legendre para Estudiantes de Ciencias. Coordenadas Generalizadas para estudiantes de Física. Cálculo Variacional con fronteras fijas. ? ? ? ? ? ? ?? DEDICATORIAS El presente texto que he logrado (en la parte que me corresponde) con gran esfuerzo, tenacidad y luchando contra todas las adversidades que he tenido que enfrentar en mi vida académica y, especialmente, personal se lo dedico de todo corazón, al igual que todos mis otros textos: A mi difunto padre Raffaele Soldovieri Mastursi y a mi madre Rita Elena Carmona. A a mis hijos Terenzio José Soldovieri Martínez y Marchello Soldovieri Carmona. A mi compañera de vida Yeldri Yolaura Chourio Herrera. Mi hermosa, tierna y muy tropical negra-novia. La persona que, con su amor y atención desinteresada, ha hecho de mi una nueva persona. Se lo dedico también a todos los que fueron mis estudiantes en la Licenciatura de Física de nuestra muy ilustre Universidad del Zulia, nuestra indudable Alma Máter, a todos aquellos estudiantes que no lo fueron y aquellos de otras universidades de nuestro país y del extranjero que estudian Física y carreras afines que, con esfuerzo y sacrificio, liberan obtáculos tras obtáculos para conseguir sus sueños. A todos ellos, especialmente, me debo y son la razón de todo el presente esfuerzo académico. Terenzio Soldovieri C. i DEDICATORIAS . Al autor de esta obra, el gran YO SOY. A Aura y Devis. A Mary, Vero, Vale y Viki. Tony Viloria Avila. SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: ii AGRADECIMIENTOS A quí van los agradecimientos. iii INDICE GENERAL PREFACIO xiii 1 CONOCIMIENTOS BASICOS 1 1.1 Angulo plano . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.2 Angulo diedro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.3 Angulo poliedro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.3.1 Definición . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.3.2 Tipos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.3.3 Intersección de un ángulo poliedro con la superficie de una esfera . 1.4 Superficie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.4.1 Definición y clasificación de una superficie . . . . . . . . . . . . . . . . 1.4.2 Tipos de superficies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.4.2.1 Superficie abierta . . . . . . . . . . . . . . . . . . . . . . . . . . 1.4.2.2 Superficie Cerrada . . . . . . . . . . . . . . . . . . . . . . . . . . 1.4.3 Representacion vectorial de una superficie . . . . . . . . . . . . . . . . 1.5 Triángulos esféricos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.5.1 Definiciones básicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.5.2 Definición de triángulo esférico . . . . . . . . . . . . . . . . . . . . . . . 1.5.3 Exceso esférico y superficie de un triángulo esférico . . . . . . . . . . 1.5.4 Teoremas trigonométricos fundamentales para la resolución de triángulos esféricos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.5.4.1 Teorema del Seno . . . . . . . . . . . . . . . . . . . . . . . . . . iv 2 7 8 8 8 9 10 10 11 11 11 12 15 15 16 18 19 19 INDICE GENERAL 1.5.4.2 Teorema del Coseno para los lados . . . . . . . . . . . . . . . 1.5.4.3 Teorema del Coseno para los ángulos internos . . . . . . . . 1.5.4.4 Teorema de la Cotangente . . . . . . . . . . . . . . . . . . . . 1.5.5 Algunas relaciones trigonométricas derivadas . . . . . . . . . . . . . . 1.5.5.1 Relación trigonométrica entre los lados de un triángulo esférico y sus alturas esféricas . . . . . . . . . . . . . . . . . . . . 1.5.5.2 Funciones trigonométricas de los semiángulos . . . . . . . . . 1.5.5.3 Relación trigonométrica entre el exceso de un triángulo esférico y sus lados . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 ANGULO SOLIDO 2.1 2.2 2.3 2.4 20 20 21 22 Definición . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Unidades de ángulo sólido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Expresión diferencial e integral del Angulo Sólido . . . . . . . . . . . . . . . . Propiedades del ángulo sólido . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.4.1 Propiedad 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.4.2 Propiedad 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.4.3 Propiedad 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.4.4 Propiedad 4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.4.5 Propiedad 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.4.6 Propiedad 6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.4.7 Propiedad 7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.4.8 Propiedad 8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.5 Diferenciales notables de ángulo sólido . . . . . . . . . . . . . . . . . . . . . . 2.5.1 Diferencial de ángulo sólido subtendido por un elemento de superficie Cartesiano . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.5.2 Diferencial de ángulo sólido subtendido por un elemento de superficie cilíndrico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.5.3 Diferencial de ángulo sólido subtendido por un elemento de superficie esférico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.6 Diferencial de superficie y diferencial de volumen en función del ángulo sólido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.6.1 Diferencial de superficie dS . . . . . . . . . . . . . . . . . . . . . . . . . . 2.6.2 Diferencial de volumen dV . . . . . . . . . . . . . . . . . . . . . . . . . . 2.7 Ecuación para el cálculo del ángulo sólido subtendido por un triángulo utilizando trigonometría esférica y cálculo vectorial . . . . . . . . . . . . . . . 2.7.1 Primer enfoque . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. 19 19 19 20 22 25 26 30 30 31 33 33 34 36 36 37 38 38 39 40 42 42 42 43 44 Pág.: v INDICE GENERAL 2.7.2 Segundo enfoque . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47 3 ALGUNOS EJEMPLOS DE CALCULO DE ANGULOS SOLIDOS 50 3.1 Angulo sólido subtendido por una superficie plana pequeña . . . . . . . . . 3.2 Angulo sólido subtendido por una superficie pequeña que está sobre una esfera . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.3 Angulo sólido subtendido por un casquete esférico . . . . . . . . . . . . . . . 3.3.1 Conociendo de antemano la superficie del casquete . . . . . . . . . 3.3.2 Sin tener de antemano la superficie del casquete . . . . . . . . . . . . 3.3.3 Usando la propiedad 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.4 Angulo sólido subtendido por un disco con respecto a un punto que se encuentra en su eje de simetría . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.4.1 Usando coordenadas cilíndricas . . . . . . . . . . . . . . . . . . . . . . 3.4.2 Usando coordenadas esféricas . . . . . . . . . . . . . . . . . . . . . . . 3.5 Angulo sólido subtendido por un disco con respecto a un punto que se encuentra fuera de su eje de simetría . . . . . . . . . . . . . . . . . . . . . . . 3.6 Diferencial de ángulo sólido subtendido por el diferencial de superficie comprendido entre dos meridianos de una esfera con respecto al centro de la misma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.7 Diferencial de ángulo sólido subtendido por el diferencial de superficie comprendido entre dos paralelos de una esfera con respecto al centro de la misma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.8 Angulo sólido de la superficie formada por la intersección de dos meridianos con dos paralelos de una esfera con respecto al centro de la misma . 3.9 Angulo sólido subtendido por una esfera y un hemisferio con respecto a su centro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.9.1 Esfera . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.9.2 Hemisferio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.10 Angulo sólido según el cual se ve el espacio comprendido en el interior de un diedro de ángulo desde un punto P de su arista . . . . . . . . . . . . . . 3.11 Angulo sólido subtendido por una de las caras de un cubo con respecto a un punto situado en el centro del mismo . . . . . . . . . . . . . . . . . . . . 3.11.1 En coordenadas Cartesianas . . . . . . . . . . . . . . . . . . . . . . . . 3.11.2 En coordenadas cilíndricas . . . . . . . . . . . . . . . . . . . . . . . . . . 3.11.3 Utilizando la expresión vectorial (primer enfoque) . . . . . . . . . . . . 3.11.4 Utilizando la expresión vectorial (segundo enfoque) . . . . . . . . . . SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. 51 52 53 53 54 55 55 55 57 58 59 60 61 62 62 63 63 64 64 66 68 70 Pág.: vi INDICE GENERAL 3.12 Angulo sólido subtendido por una placa rectangular con respecto a punto situado en su eje de simetría . . . . . . . . . . . . . . . . . . . . . . 3.13 Angulo sólido subtendido por una placa rectangular con respecto a punto situado directamente sobre uno de sus vértices . . . . . . . . . . un . . . 73 un . . . 79 4 ALGUNAS APLICACIONES DE LA DEFINICION DE ANGULO SOLIDO 83 4.1 4.2 4.3 4.4 4.5 En Electrofisiología Cardíaca . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84 En Magnetismo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89 En Electricidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93 En Gravitación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96 En Radiación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96 4.5.1 Intensidad de Radiación . . . . . . . . . . . . . . . . . . . . . . . . . . . 97 4.5.2 Intensidad de radiación medida a una distancia de la superficie de un cuerpo negro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99 4.6 En Telecomunicaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101 4.6.1 Area efectiva de una antena . . . . . . . . . . . . . . . . . . . . . . . . 101 4.6.2 Temperatura de una antena . . . . . . . . . . . . . . . . . . . . . . . . . 103 4.7 En Dispersión de Partículas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105 4.8 En Detección de Radiación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109 4.8.1 Factores que afectan la eficiencia de un detector . . . . . . . . . . . 109 4.8.2 Tipos de eficiencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111 4.8.2.1 Eficiencia geométrica "G . . . . . . . . . . . . . . . . . . . . . . 111 4.8.2.2 Eficiencia intrínseca insidente "i (E) . . . . . . . . . . . . . . . 111 4.8.2.3 Eficiencia intrínseca de la fuente " (E) . . . . . . . . . . . . . 111 4.8.2.4 Eficiencia de pico de energía completo para la fuente " (E) R (E) y eficiencia de pico de energía completo " (E) R (E) . . . . 112 BIBLIOGRAFIA SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. 113 Pág.: vii INDICE DE FIGURAS 1.1 Angulo plano subtendido por una figura plana en el plano, con respecto a un punto P de referencia situado en el mismo plano. . . . . . . . . . . . . 1.2 Medición del ángulo plano subtendido por una figura plana con respecto a un punto P . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . sn . Por esta 1.3 Cada ángulo plano tiene la propiedad de que = Rs11 = Rs22 Rn razón sirve para identificar cada ángulo plano. . . . . . . . . . . . . . . . . 1.4 Definición de 1 radián. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.5 Angulo diedro de tamaño . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.6 Angulo poliedro. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.7 Angulo poliedro formado por infinitas semirrectas que parten del punto V (vértice) y se apoyan sobre la curva cerrada C. . . . . . . . . . . . . . . . . . 1.8 La intersección de un ángulo poliedro con dos esferas de radios R1 y R2 centradas en su vértice V generan respectivamente dos superficies S1 y S2 que son homotéticas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.9 Cinta de Möbius. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.10 Botella de Klein. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.11 Representación vectorial de una superficie abierta S de dos caras. . . . . . 1.12 Representación vectorial de la superficie abierta de dos caras S y la definición del vector unitario n b. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.13 Representación vectorial de una superficie dS diferencial, abierta y de dos caras. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.14 Orientación de n b en una superficie cerrada S de dos caras. Cada trozo dibujado sobre S representa un diferencial de la misma. . . . . . . . . . . . . 1.15 Caras de S. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . viii 2 3 3 5 7 8 9 10 11 12 13 13 14 14 15 INDICE DE FIGURAS 1.16 1.17 1.18 1.19 Intersección de un plano con una esfera. . . . . . . Angulo esférico . . . . . . . . . . . . . . . . . . . . . (a) Triángulo esférico. (b) Alturas esféricas ha , hb y hc Triángulo esférico y el ángulo triedro asociado. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . de un triángulo esférico. . . . . . . . . . . . . . . . 2.1 Cono formado de manera tal que las semirrectas que surgen del punto P tocan el cuerpo sin pasar nunca por su interior, es decir, lo bordean. . . . . 2.2 Angulo sólido subtendido por un cuerpo con respecto a un punto de referencia P . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.3 (a) Definición de 1 estereorradián y (b) otras unidades para expresar ángulos sólidos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.4 Angulo sólido subtendido por una supeficie diferencial dS con respecto a un punto P . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.5 Diferencial de angulo sólido d subtendido por una superficie infinitesimal dS con respecto a un punto de referencia P . . . . . . . . . . . . . . . . . . . . 2.6 Corte transversal del cono elemental de la figura 2.5. . . . . . . . . . . . . . . 2.7 Angulo sólido cuando P no está en el origen del sistema de coordenadas escogido. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Sn 2.8 Se cumple que RS12 = RS22 sirve para identificar cada 2 . Por esta razón Rn 1 2 ángulo sólido. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.9 Proyección de la superficie S sobre la superficie de la esfera auxiliar de radio R = 1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.10 Superficies que subtienden un mismo ángulo sólido con respecto a un punto de referencia P . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.11 Intersección de una superficie abierta S2 con el cono generado por una superficie abierta S con respecto a un punto P , en la que se obtiene una superficie S1 : (a) intersección entre P y S, (b) intersección más allá de S. . 2.12 Dos superficies S1 y S2 que poseen el mismo perímetro C con respecto al punto P y que juntas forman la superficie cerrada S. . . . . . . . . . . . . . . 2.13 Angulo sólido subtendido por una superficie cerrada S con respecto a un punto P externo a la misma. . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.14 (a) Superficie cerrada S con un punto P en su interior, respecto del cual se desea calcular el ángulo sólido subtendido por la misma. (b) La superficie de la esfera auxiliar quedará completamente cubierta al proyectar S sobre la misma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.15 Angulos sólidos 1 y 2 opuestos por el vértice. . . . . . . . . . . . . . . . . . . 2.16 Diferencial de ángulo sólido d subtendido por un diferencial de superficie Cartesiano . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. 15 16 16 17 23 23 25 27 27 28 29 30 31 33 34 34 36 37 38 38 Pág.: ix INDICE DE FIGURAS 2.17 Diferencial de ángulo sólido d subtendido por un diferencial de superficie cilíndrico. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.18 Diferencial de ángulo sólido d subtendido por un diferencial de superficie dS esférico. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.19 Diferencial de volumen dV en coordenadas esféricas. . . . . . . . . . . . . . 2.20 Triángulo escaleno A0 B 0 C 0 cuyo ángulo sólido subtendido con respecto al punto P se desea calcular. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.21 (a) Angulo sólido subtendido por el triángulo escaleno A0 B 0 C 0 con respecto al punto P . (b) Vista ampliada del triángulo esférico resultante ABC. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.22 (a) Vectores de posición de los vértices del triángulo plano A0 B 0 C 0 con respecto al punto P . (b) Vectores de posición de los vértices del triángulo plano A0 B 0 C 0 y de su centroide C, todos con respecto al punto P . Se muestra, además, el vector unitario n b perpendicular a la superficie del mencionado triángulo. Se ha girado con respecto al de la figura 2.21, para poder observar mejor los detalles. . . . . . . . . . . . . . . . . . . . . . . 2.23 (a) Retángulo subdividido en dos triángulos. (b) Pentágono subdividido en tres triángulos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.24 (a) Superficie S de forma compleja representada mediante un gran número de pequeños triángulos cuyos vértices están sobre la misma. Figura tomada de la referencia [Ref. 23]. (b) Malla basada en icosaédrica con 1280 triángulos proyectados sobre una esfera. Figura tomada de la referencia [Ref. 24]. (c) Triangulación de un torso humano. Figura tomada de la referencia [Ref. 25]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.1 Angulo sólido subtendido por una superficie S plana y pequeña con respecto a un punto P situado a una distancia R de la misma. . . . . . . . . 3.2 Superficie pequeña S sobre una esfera de radio R y centro P . . . . . . . . . 3.3 (a) Casquete esférico y (b) Cálculo del ángulo sólido subtendido por un casquete esférico con respecto a un punto P situado en el centro de la esfera que lo genera. Se utilizan coordenadas esféricas con origen 0 en P . 3.4 (a) Disco de radio b que se encuentra a una distancia h de un punto P ubicado sobre su eje de simetría y (b) Cálculo del ángulo sólido subtendido por el disco con respecto a P usando coordenadas cilíndricas. . . . . . . . 3.5 Cálculo del ángulo sólido subtendido por el disco con respecto a P , usando coordenadas esféricas. . . . . . . . . . . . . . . . . . . . . . . . . . . . SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. 40 41 42 43 44 47 48 49 52 52 53 55 57 Pág.: x INDICE DE FIGURAS 3.6 Cálculo del ángulo sólido para un disco de superficie S y de radio b que se encuentra a una distancia h de un punto P ubicado fuera de su eje de simetría. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.7 Diferencial de superficie dS entre dos meridianos ' y ' + d' de una esfera de radio R. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.8 Diferencial de superficie dS entre dos paralelos y + d de una esfera de radio R.. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.9 (a) Esfera de radio R. (b) Hemisferio de radio R. . . . . . . . . . . . . . . . . . 3.10 Angulo diedro de tamaño . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.11 Cubo de lado ` en cuyo centro se ha colocado el origen de un sistema de coordenadas Cartesianas y con respecto al cual se desea calcular el ángulo sólido subtendido por la cara ABCD. . . . . . . . . . . . . . . . . . 3.12 Cálculo del ángulo sólido , en coordenadas Cartesianas, subtendido por la cara ABCD con respecto al punto P ubicado en el centro del cubo. 3.13 (a) Cálculo en coordenadas cilíndricas del ángulo sólido 4 subtendido por la porción ABP 0 de la cara BDF H del cubo con respecto al punto P . (b) Vista de la mencionada cara sobre el plano xy con la finalidad de obtener el límite superior para r en la integral (3.61). . . . . . . . . . . . . . . 3.14 Pirámide de base cuadrada. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.15 (a) Placa rectangular de largo `1 y ancho `2 , a la cual se le calcula el ángulo sólido subtendido por ella con respecto al punto P . (b) Placa vista desde +z. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.16 (a) Placa rectangular de superficie S y dimensiones a, b. (b) Para llevar a cabo el cálculo del ángulo sólido subtendido por S con respecto al punto P , se posiciona un sistema de coordenadas Cartesianas de manera que su origen coincida con el vértice que está justo debajo de dicho punto. . . 3.17 (a) Placa rectangular dividida en dos triángulos AB0 y BC0. (b) Establecimiento de los límites de integración para el cálculo del ángulo sólido subtendido por la placa rectangular con respecto al punto P . . . . 4.1 Electrocardiograma (ECG). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.2 Componentes de un ECG. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.3 Angulo sólido subtendido por la zona explorada con respecto al electrodo considerado como un punto P . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.4 Influencia espacial: el ángulo sólido subtendido por la frontera se incrementa después de incrementar la superficie isquémica, aumentando también la desviación del segmento ST. . . . . . . . . . . . . . . . . . . . . . . . . SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. 58 59 61 62 64 65 67 68 72 74 79 80 84 84 86 88 Pág.: xi INDICE DE FIGURAS 4.5 Influencia no espacial: la posición del electrodo, el tamaño de la superfície isquémica y el ángulo sólido se mantienen invariantes. Sin embargo, la diferencia de potencial entre los voltajes transmembrana se ha ampliado y se ha intensificado el flujo de corriente (flechas). Como resultado, aumenta la desviación del segmento ST. . . . . . . . . . . . . . . . . . . . . . ! 4.6 Campo B originado por una corriente I que en un circuito C, calculado en el punto P . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.7 (a) Mover P una cantidad d! r manteniendo fija la posición del circuito, es equivalente a mover todo el circuito (o cada uno de sus puntos) una cantidad d! r manteniendo P fijo, de aquí que se genere una superficie semejante a una cinta como la indicada por la zona rayada. (b) Pequeña ! superficie d S en forma de cinta mostrada por la zona sombreada. . . . . . 4.8 Angulo sólido d subtendido por la superficie dS con respecto al punto ! P donde es calculado el campo B . . . . . . . . . . . . . . . . . . . . . . . . . 4.9 Carga q encerrada en una superficie S. . . . . . . . . . . . . . . . . . . . . . . 4.10 Carga q fuera de la superficie S. . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.11 Intensidad de radiación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.12 La densidad de flujo f es la medida de la potencia radiante que pasa por la superficie S desde todo el espacio circundante. Aquí se supone que debajo de S no hay fuentes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.13 (a) Angulo sólido subtendido por la superficie receptora Sr con respecto a la superficie emisora Se (b) Angulo sólido subtendido por la superficie emisora Se con respecto a la superficie receptora Sr . . . . . . . . . . . . . . . 4.14 (a) Emisión de potencia desde la resistencia al espacio y (b) el radiador captura potencia desde el espacio debido a su intensidad de radiación. . 4.15 (a) Diagrama real de radiación de la antena y (b) diagrama simplificado. . 4.16 Un conmutador conecta alternativamente la antena y la resistencia R ruidosa (Nyquist). La resistencia está adaptada a la impedancia de entrada del amplificador. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.17 La Temperatura de Antena. Su respuesta a la potencia entregada a la antena por una fuente extendida a través de su lóbulo principal. . . . . . . 4.18 Dispersión de una partícula de masa m por el campo de fuerza repulsivo originado por la masa M . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.19 Haz de partículas idénticas que incide sobre un blanco situado en 0. . . . . 4.20 Dispersión de un haz de partículas incidentes por un centro de fuerzas 0. . . 4.21 Ejemplos de detectores y fuentes de radiación. . . . . . . . . . . . . . . . . . SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. 88 89 90 92 94 96 98 99 100 102 103 104 105 106 107 107 111 Pág.: xii PREFACIO A quí va el Prefacio. Terenzio Soldovieri C. - Tony Viloria Avila. xiii PREFACIO Albert Einstein 1879 - 1955 “Todos somos muy ignorantes. Lo que ocurre es que no todos ignoramos las mismas cosas”. “Lo más incomprensible del Universo, es que sea comprensible”. “Lo importante es no dejar de hacerse preguntas”. “Nunca consideres el estudio como una obligación, sino como una oportunidad para penetrar en el bello y maravilloso mundo del saber”. “La alegría de ver y entender es el más perfecto don de la naturaleza”. SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: xiv CAPITULO 1 CONOCIMIENTOS BASICOS Contenido 1.1 Angulo plano . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 1.2 Angulo diedro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 1.3 Angulo poliedro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 1.4 1.5 1.3.1 De…nición . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 1.3.2 Tipos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 1.3.3 Intersección de un ángulo poliedro con la super…cie de una esfera . . . . . 9 Super…cie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10 1.4.1 De…nición y clasi…cación de una super…cie . . . . . . . . . . . . . . . . . . 10 1.4.2 Tipos de super…cies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11 1.4.3 Representacion vectorial de una super…cie . . . . . . . . . . . . . . . . . . 12 Triángulos esféricos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 1.5.1 De…niciones básicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 1.5.2 De…nición de triángulo esférico . . . . . . . . . . . . . . . . . . . . . . . . 16 1.5.3 Exceso esférico y super…cie de un triángulo esférico . . . . . . . . . . . . . 18 1.5.4 Teoremas trigonométricos fundamentales para la resolución de triángulos esféricos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19 Algunas relaciones trigonométricas derivadas . . . . . . . . . . . . . . . . 20 1.5.5 1 CAPITULO 1. CONOCIMIENTOS BASICOS 1.1 Angulo plano Como se verá más adelante, el ángulo sólido es la medida de un ángulo en el espacio, por lo que es conveniente recordar y entender primeramente cómo se miden ángulos en el plano. Un ángulo plano es una medida de la abertura entre dos rectas que se intersectan en un punto. Figura 1.1: Angulo plano subtendido por una figura plana en el plano, con respecto a un punto P de referencia situado en el mismo plano. Supóngase que el ángulo es aquél subtendido por una figura plana en el plano, por ejemplo un rectángulo, con respecto a un punto P en el mismo plano. Este ángulo se obtiene geométricamente trazando desde P dos rectas L1 y L2 que tocan el perímetro del cuadrado sin pasar nunca por su interior, como se muestra en la figura 1.1. Para medirlo se procede como sigue: 1. Sobre las rectas L1 y L2 se superpone una circunferencia, que suele denominarse Circunferencia Auxiliar, de tal manera que su centro coincida con el punto P , como se muestra en la figura 1.2. 2. Se mide la logitud s del arco que queda limitado por las dos rectas y se mide el radio R. Del lat. subtendĕre. Tr. Geom. Unir con una línea recta los extremos de un arco de curva o de una línea quebrada [Ref. 1] También puede hacer referencia al arco de circunferencia comprendido entre los lados de un ángulo. En el caso de un ángulo sólido es la parte de esfera abarcada (casquete esférico). SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 2 CAPITULO 1. CONOCIMIENTOS BASICOS Figura 1.2: Medición del ángulo plano 3. La medida del ángulo subtendido por una figura plana con respecto a un punto P . subtendido por las dos rectas vendrá dado por, Angulo plano= Longitud del arco Radio del arco ! = s R (1.1) A las porciones de recta que limitan al ángulo se le denominan lados del ángulo y al punto de intersección P se le denomina vértice. Figura 1.3: Cada ángulo plano tiene la propiedad de que identificar cada ángulo plano. = s1 R1 = s2 R2 sn Rn . Por esta razón sirve para Si con centro en el vértice de un ángulo tal como el ángulo mostrado en la figura 1.3 se traza una circunferencia auxiliar de radio R1 , se obtiene un arco de longitud s1 de manera que su cociente da como resultado la medida de como fue descrito antes. Si SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 3 CAPITULO 1. CONOCIMIENTOS BASICOS para el mismo ángulo se traza una nueva circunferencia auxiliar de radio R2 con centro en su vértice se obtiene un arco de logitud s2 , dando su cociente como resultado la misma medida y así sucesivamente, es decir, = s2 s1 = R1 R2 sn Rn (1.2) Esta propiedad es la que hace posible tomar a (1.1) como medida del ángulo . De esta manera, Cualquiera que sea el tamaño de la circunferencia auxiliar, la relación (1.1) se mantendrá constante para la misma abertura entre las rectas. Sin embargo, al observar la figura 1.2, se puede deducir fácilmente que el ángulo disminuirá si dicho cuerpo se aleja del punto P . El ángulo tal como es definido en (1.1) es adimensional, pues es el cociente entre dos longitudes. Sin embargo, resultaría algo incómodo medir ángulos de esta manera por eso el Sistema Internacional de Unidades utiliza el Radián como unidad de ángulo. El radián se denota por rad. En concreto, Un radián (rad) es la medida de aquél ángulo subtendido por dos rectas de tal manera que = 1 rad, es decir, s = R, es decir, 1 rad = R R como se muestra en la figura 1.4. La adopción del nombre “radián” como unidad de ángulo plano es notablemente artificial, pues no surge como la mayor parte de las unidades derivadas del Sistema Internacional, que son conjuntos de otras unidades relacionadas por operaciones. Por eso el Sistema Internacional dice del radián lo siguiente: “El radián es un nombre especial dado al número uno que puede usarse para aportar información acerca de la cantidad a la que califica. En la práctica, el símbolo rad se usa cuando conviene, pero el símbolo de la unidad derivada uno se suele omitir al especificar valores de cantidades adimensionales”. SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 4 CAPITULO 1. CONOCIMIENTOS BASICOS Figura 1.4: Definición de 1 radián. Lo mismo dice para el estereorradián que es la unidad de medida de un ángulo sólido como se verá más adelante. Además de en radianes, los ángulos planos también suelen medirse en grados sexagecimales y en grados centesimales. Un grado sexagesimal es el ángulo central subtendido por un arco cuya longitud es igual a 1=360 de la circunferencia. Es la nonagésima 1=90 parte de un ángulo recto. El grado sexagesimal, como unidad del sistema de medida de ángulos sexagesimales, está definido partiendo de que un ángulo recto tiene 900 (90 grados sexagesimales) y de que sus divisores, el minuto sexagesimal y el segundo sexagesimal, están definidos del siguiente modo: 1 ángulo recto = 900 (grados sexagesimales) (1.3) 1 grado sexagesimal = 600 (minutos sexagesimales) 1 minuto sexagesimal = 6000 (segundos sexagesimales). Es posible expresar una cantidad en grados, minutos y segundos. Las partes de grado inferiores al segundo se expresan como parte decimal de segundo. Por ejemplo: 120 340 3400 ; 130 30 23; 800 ; 1240 450 34; 7000 ; 20 340 1000 . También es posible representar en forma decimal la medida de un ángulo en representación sexagesimal teniendo en cuenta que: 10 = (1=60)0 = 0; 016666670 (redondeando a ocho dígitos) 100 = (1=60)0 = (1=3600)0 = 0; 000277780 Así 120 150 2300 = 120 + 15(1=60)0 + 23(1=3600)0 (1.4) 12; 256390 . Es posible obtener una equivalencia entre los radianes y la medida de ángulo en grados sexagesimales planteándose una simple regla de tres: 3600 equivalen a la logitud de una circunferencia completa 2 R, entonces grados sexagesimales equivaldrán a SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 5 CAPITULO 1. CONOCIMIENTOS BASICOS una longitud de arco s, 3600 de aquí que, ! 2 R ! s 2 R R = 3600 1800 Ahora, al sustituir este resultado en (1.1) se obtiene, s= = o también, = 1800 (1.5) (1.6) radianes (1.7) grados sexagesimales (1.8) 1800 entonces, 10 = 0; 01745329 rad (1.9) 1 rad = 57; 295780 (1.10) o, El grado centesimal o gon, también llamado gradián (plural: gradianes), es una unidad de medida de ángulos planos, alternativa al grado sexagesimal y, como éste, no perteneciente al Sistema Internacional de Unidades, cuyo valor se define como el ángulo central subtendido por un arco cuya longitud es igual a 1=400 de la circunferencia. La circunferencia se divide, por tanto, en 400 gon y un ángulo recto en 100 gon, lo que permite determinar que un grado centesimal equivale a nueve décimas partes del grado sexagesimal, 9 1g = 10 = 0; 90 (1.11) 10 Su símbolo es una "g" minúscula en superíndice colocada tras la cifra, por ejemplo: 12; 4574g ). La denominación de gon suele restringirse a los ámbitos especializados de la topografía y la ingeniería civil, donde es muy utilizada esta unidad de medida para definir el valor de los ángulos. La denominación de gradián se emplea en las calculadoras, en las que suele representarse con la abreviatura grad. Sus divisores son: 1 grado centesimal = 100 minutos centesimales (100m o 100c ) 1 minuto centesimal = 100 segundos centesimales (100s o 100cc ) (1.12) Por ejemplo, las siguientes cantidades representan el mismo ángulo: 230 470 3500 (grados sexagesimales) 23; 79310 (grados sexagesimales con fracción decimal) 26g 43c 67cc (gon con minutos y segundos centesimales) 26; 4367g (gon o grados centesimales) SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. (1.13) Pág.: 6 CAPITULO 1. CONOCIMIENTOS BASICOS Los minutos y segundos de gon se corresponden con la fracción decimal de gon, cosa que no ocurre con los grados sexagesimales. No deben confundirse los grados centesimales con el uso de fracciones decimales para expresar ángulos en grados sexagesimales. La definición de ángulo plano (1.1) puede modificarse para crear un concepto más útil para la ciencia y la ingeniería. Ese concepto es el de Angulo Plano Orientado. Si en la figura 1.2 para medir el arco s se va desde la recta L1 a la L2 , es decir, en sentido contrario al avance de las agujas de un reloj, la medida s se considera positiva y, como el radio R se considera siempre positivo, el ángulo resulta positivo. Por otro lado, si para medir el arco s se va desde L2 a la L1 , es decir, en el sentido del avance de las agujas de un reloj, la medida s se considera negativa y así el ángulo resulta negativo. Esto suele expresarse diciendo que los ángulos que se describen en sentido contrario al del movimiento de las agujas del reloj son positivos, y los que se describen en el mismo sentido al del movimiento de las agujas de un reloj son negativos. 1.2 Angulo diedro Un ángulo diedro [Ref. 2, 3, 4, 5] es aquél formado por dos planos que se cortan, como se muestra en la figura 1.5. Figura 1.5: Angulo diedro de tamaño . El tamaño del ángulo diedro se define como el tamaño del ángulo (en la figura es ) formado entre dos líneas que se cortan (una en cada plano) que son ambas perpendiculares a la arista a lo largo de la cual se cortan los dos planos. El valor de un ángulo diedro es la amplitud del menor ángulo posible que conforman dos semirrectas SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 7 CAPITULO 1. CONOCIMIENTOS BASICOS pertenecientes una a cada semiplano. Se obtiene tomando un plano auxiliar perpendicular a la recta común, siendo la apertura de las semirrectas intersección la medida del ángulo diedro. 1.3 Angulo poliedro 1.3.1 Definición Un ángulo poliedro [Ref. 2, 3, 4, 5] es la parte del espacio limitada por varios ángulos planos no coplanarios, con vértice V común y lados compartidos (cada lado es común a dos ángulos) como, por ejemplo, se muestra en la figura 1.6. A los ángulos se les llaman caras, a los lados se les llaman aristas y al vértice de los ángulos se le llama vértice del ángulo poliedro. Dos caras consecutivas forman un ángulo diedro. El ángulo poliedro más sencillo es un ángulo triedro, que es el formado por tres caras. Figura 1.6: Angulo poliedro. Se considera también como ángulo poliedro al formado por infinitas semirrectas de extremo común que se apoyan sobre una curva cerrada C, es decir, una superficie cónica (ver figura 1.7). Equivale a un ángulo poliedro de infinitas caras. 1.3.2 Tipos Los ángulos poliedros pueden ser convexos y cóncavos: SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 8 CAPITULO 1. CONOCIMIENTOS BASICOS Figura 1.7: Angulo poliedro formado por infinitas semirrectas que parten del punto V (vértice) y se apoyan sobre la curva cerrada C. 1. El convexo es el ángulo poliedro que queda en el mismo semiespacio respecto a los planos de cada una de sus caras. 2. El cóncavo es el ángulo poliedro en el que al prolongar el plano de alguna de las caras, una parte de él queda en un semiespacio y el resto en el otro. 1.3.3 Intersección de un ángulo poliedro con la superficie de una esfera Si un ángulo poliedro se corta por la superficie de una esfera con centro en su vértice y radio R, la superficie intersección es proporcional a R2 (ver figura 1.8). Si se corta el ángulo poliedro por dos esferas de radios R1 y R2 , las superficies S1 y S2 son homotéticas; por tanto son proporcionales al cuadrado de su razón de homoteciay [Ref. 6], S2 R2 = 22 (1.14) S1 R1 Es posible hallar la superficie S1 en función de únicamente la superficie S2 y el radio R2 de la esfera que define a esta última superficie. En efecto, al hacer R1 = 1u (u =una | {z } Esfera unitaria unidad de longitud) en (1.14) resulta que, S1 S2 = ) S1 = 1u2 R22 y S2 R22 u2 (1.15) La homotecia es la transformación que hace corresponder a todo punto A de una figura otro punto A0 0 (homólogo de A) alineado con A y con centro de homotecia 0 dado que forma que: OA OA = k. Aquí k es una constante no nula, llamada razón de homotecia. SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 9 CAPITULO 1. CONOCIMIENTOS BASICOS Figura 1.8: La intersección de un ángulo poliedro con dos esferas de radios R1 y R2 centradas en su vértice V generan respectivamente dos superficies S1 y S2 que son homotéticas. y como esta relación es general para cualquier esfera de radio R2 = R entonces, Se = S R2 u2 (1.16) donde Se es la superficie determinada por el ángulo poliedro sobre la superficie de la esfera unitaria y S es la superficie determinada por el mismo ángulo sobre la esfera de Se radio R. Nótese que la cantidad 1u 2 es adimensional y numéricamente igual a Se . Si a esta cantidad se le denomina entonces, = S R2 (1.17) que es clave para la definición matemática de ángulo sólido. En el caso de que se usen más de dos esferas, relaciones como las (1.14) se seguirán cumpliendo. En vista de esto, ahora es posible escribir que, S1 S2 = 2 = 2 R1 R2 = Sn = Rn2 = constante (1.18) con n = 1; 2; 3; : : : ;hasta el número total de esferas. 1.4 Superficie 1.4.1 Definición y clasificación de una superficie Antes de ver cómo es posible representar vectorialmente una superficie, es oportuno repasar un poco de teoría sobre las mismas. SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 10 CAPITULO 1. CONOCIMIENTOS BASICOS Se entiende como superficie al objeto geométrico que posee dos dimensiones, es decir, cada uno de sus puntos espaciales de tres coordenadas se puede definir usando sólo dos parámetros. También es posible definirla como el lugar geométrico de las posiciones sucesivas de una línea (generatriz) que se mueve en el espacio siguiendo una ley determinada y continua. 1.4.2 Tipos de superficies Una superficie puede ser abierta o cerrada [Ref. 7]: 1.4.2.1 Superficie abierta Es aquella superficie limitada por una curva cerrada. Puede ser de dos caras o de una cara. Se dice que es de dos caras cuando dado un punto sobre una de sus caras no puede situarse en igual posición sobre la otra cara, sin cruzar su contorno. Se puede visualizar esto imaginando que se quiere colorear la superficie frotando un creyón sobre ella y al hacerlo, sin levantar el creyon ni cruzar el contorno, queda una cara sin colorear. Será de una cara cuando no ocurre lo anterior. Como ejemplo de una superficie abierta de este tipo está la cinta de Möbius (ver figura 1.9). Se obtiene fácilmente pegando los extremos de una cinta de papel, después de haber girado media vuelta uno de los lados menores del rectángulo, con respecto al otro. Se ve que la superficie abierta así obtenida es de una sola cara. Figura 1.9: Cinta de Möbius. 1.4.2.2 Superficie Cerrada Es la superficie exterior de un objeto con volumen. SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 11 CAPITULO 1. CONOCIMIENTOS BASICOS Es la superficie exterior de un objeto con volumen. También pueden ser de dos caras y de una cara. Se dice que es de dos caras cuando divide al espacio en dos regiones, una interior a la superficie y otra exterior, de manera que un punto no puede pasar de la una a la otra sin atravesar la superficie. Será de una cara cuando no se cumple lo anterior, es decir, no separa al espacio en dos regiones. Por lo tanto, no puede decirse que un punto sea interior o exterior porque dos cualesquiera se pueden unir por una linea que no atraviesa la superficie. Como ejemplo de una superficie cerrada de una cara está la botella de Klein (ver figura 1.10), que se forma extendiendo el área lateral de un cilindro y llevando a empalmarla con la base inferior, después de atravesar la superficie lateral del mismo, y suprimir la parte atravesada de la superficie lateral. Esta superficie se penetra a sí misma, y puede observarse que no divide al espacio en dos partes, una interior y otra exterior. Figura 1.10: Botella de Klein. De aquí en adelante sólo serán consideradas superficies abiertas y cerradas de dos caras. 1.4.3 Representacion vectorial de una superficie ! ! Como se sabe, la magnitud del producto vectorial de dos vectores A y B es igual a la superficie del paralelogramo cuyos lados son definidos por dichos vectores [Ref. 8]. Lo anterior sugiere que es posible representar vectorialmente una superficie. La representación vectorial de una superficie abierta cualquiera se hace por convención. En efecto, considérese una superficie abierta S de dos caras como una de las mostradas en la figura 1.11, cuyo contorno C está orientado de la forma señala por la flecha. Por convención, SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 12 CAPITULO 1. CONOCIMIENTOS BASICOS Figura 1.11: Representación vectorial de una superficie abierta S de dos caras. ! La superficie S se representará mediante un vector S de forma tal que: 1. su magnitud sea igual a la medida de S. 2. su dirección sea perpendicular S. 3. y su sentido sea el mismo del avance de un tornillo de rosca derecha cuando se hace girar en el sentido de orientación del contorno C de S. Suele utilizarse también la regla de la mano derecha y la llamada regla del sacacorchos. Figura 1.12: Representación vectorial de la superficie abierta de dos caras S y la definición del vector unitario n b. Por lo anterior, también es posible escribir, ! S = Sb n (1.19) ! donde n b es un vector normal a S , como se muestra en la figura 1.12. Obviamente, la ! orientación de n b sigue el mismo convenio que el usado para S . SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 13 CAPITULO 1. CONOCIMIENTOS BASICOS Figura 1.13: Representación vectorial de una superficie dS diferencial, abierta y de dos caras. Para el caso de una superficie diferencial dS se cumple igualmente todo lo anterior, sólo que su representación vectorial será, Figura 1.14: Orientación de n b en una superficie cerrada S de dos caras. Cada trozo dibujado sobre S representa un diferencial de la misma. ! dS = n bdS como se muestra en la figura 1.13, siendo la superficie total, Z ! ! S = dS (1.20) (1.21) S ! ! Para una superficie cerrada se tendrá que S = 0 . En el caso de una superficie cerrada, es conveniente orientar n b de tal manera que siempre apunte hacia el exterior de la misma, como se muestra en la figura 1.14. En una superficie S abierta de dos caras se puede hablar de una “cara negativa” y una “cara positiva”. Se denomina cara negativa (también cara sur) de S, aquella por donde penetra n b y cara positiva (también norte) aquella por donde sale el mismo, como es mostrado en la figura 1.15. SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 14 CAPITULO 1. CONOCIMIENTOS BASICOS Figura 1.15: Caras de S. 1.5 Triángulos esféricos 1.5.1 Definiciones básicas La intersección de una esfera con un plano genera una circunferencia (ver figura 1.16). Se generará la mayor circunferencia posible, denominada Circunferencia Máxima, cuando el plano se hace pasar por el centro de la esfera. Al resto de las circunferencias, es decir, aquellas que se generan por la intersección de planos que no pasan por el centro, se les denominan Circunferencias Menores. Una circunferencia máxima divide a la esfera en dos hemisferios iguales.Dadas dos circunferencias máximas de una Figura 1.16: Intersección de un plano con una esfera. superficie esférica, éstas siempre se cortan en dos puntos que son los extremos de un diámetro de la esfera; en efecto, los planos que determinan las dos circunferencias máximas se cortan en una recta que pasa por el centro de la esfera, es decir, en un diámetro, luego los extremos del mismo son los puntos en que se cortan las circunferencias máximas. SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 15 CAPITULO 1. CONOCIMIENTOS BASICOS Se denomina Angulo Esférico entre dos circunferencias máximas, como se muestra en la figura 1.17, a aquél formado por las semitangentes a dichas circunferencias en uno de sus puntos de contacto. También se puede definir como el ángulo diedro que forman los planos que determinan a las circunferencias máximas. Figura 1.17: Angulo esférico . 1.5.2 Definición de triángulo esférico Si tres puntos de una superficie esférica A, B y C son unidos por arcos de circunferencia máxima se obtiene una figura triangular denominada Triángulo Esférico, como se muestra en la figura 1.18a. Cada uno de esos arcos son sus lados y subtienden ángulos planos a, b, y c con respecto al centro 0 de la esfera, los cuales deben ser menores a rad.Los lados de un triángulo esférico se miden, por conveniencia, mediante el án- Figura 1.18: (a) Triángulo esférico. (b) Alturas esféricas ha , hb y hc de un triángulo esférico. SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 16 CAPITULO 1. CONOCIMIENTOS BASICOS gulo plano que subtienden y no por su longitud. En caso de que se desee conocer la medida de longitud del arco, sólo habrá que multiplicar por el radio de la esfera. Como se muestra en la figura 1.18b, al arco de circunferencia máxima perpendicular al arco BC y que pasa por A se le llama Altura Esférica AD del triángulo y se designa por ha ; al que pasa por B perpendicularmente al arco AC se le llama altura esférica BF del triángulo y se designa por hb ; y finalmente al que pasa C perpendicularmente al arco AB se le llama altura esférica CG del triángulo y se designa por hc . Como puede notarse, las alturas esféricas también se miden por el ángulo plano que subtienden y no por su longitud. Cuando se unen mediante rectas, véase la figura 1.19, el centro 0 de la esfera con los vértices de un triángulo esférico ABC se forma un ángulo triedro 0A0B0C0 que se denomina ángulo triedro asociado al triángulo esférico. Los lados a, b y c del triángulo esférico son precisamente los ángulos de las caras del mismo y los ángulos internos , y de dicho triángulo esférico, son sus ángulos diedros. Figura 1.19: Triángulo esférico y el ángulo triedro asociado. Ahora, en vista de lo anterior, es posible decir que, Un Triángulo Esférico es aquella figura obtenida mediante la intersección de un ángulo triedro con una superficie esférica cuyo centro esté en su vértice. Es evidente que las medidas de los ángulos de las caras del ángulo triedro así como las de sus ángulos diedros son independientes del radio de la esfera, por lo tanto, las relaciones entre los lados y los ángulos de un trángulo esférico también lo son, por esta SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 17 CAPITULO 1. CONOCIMIENTOS BASICOS razón suele considerarse en general la esfera unitaria para el estudio de este tipo de triángulos. 1.5.3 Exceso esférico y superficie de un triángulo esférico Como se sabe, la suma de los ángulos internos de un triángulo plano (Geometría Euclídea) suman rad. En en caso de un triángulo esférico la suma de estos ángulo es siempre superior a dicha cantidad. En verdad se puede demostrar que en un triángulo esférico los ángulos internos , y cumplen que, < + + (1.22) <3 Se llama Exceso Esférico " de un triángulo esférico a la la suma de sus ángulos internos disminuida por dos ángulos rectos, es decir, disminuida en rad. Es siempre positivo. Matemáticamente se obtiene mediante, "= + (1.23) + Por otro lado, la superficie de un triángulo esférico viene dada por el llamado Teorema de Girard, cuyo enunciado es el siguiente: Si R es el radio de una esfera y , y son los ángulos internos de un triángulo esférico (medidos en radianes) cuyos lados son arcos de circunferencias máximas de dicha esfera, entonces la superficie S de dicho triángulo vendrá dada por la expresión, S=( + + ) R2 (1.24) Al usar (1.23) la expresión (1.24) puede escribirse también como, S = "R2 (1.25) El anterior teorema es bastante sencillo de demostrar. Demostraciones de este teorema se pueden encontrar en las referencias [Ref. 9, 10, 11]. En el caso de que la esfera sea unitaria resulta, S=" (1.26) resultado que será útil más adelante para calcular el ángulo sólido subtendido por un triángulo esférico con respecto a un punto. SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 18 CAPITULO 1. CONOCIMIENTOS BASICOS 1.5.4 Teoremas trigonométricos fundamentales para la resolución de triángulos esféricos Las demostraciones de las relaciones aquí presentadas pueden verse en las referencias [Ref. 9, 11, 12]. 1.5.4.1 Teorema del Seno En todo triángulo esférico, los senos de los lados son proporcionales a los senos de los ángulos opuestos, Sen a Sen b Sen c = Sen = Sen (1.27) Sen Esta relación permite calcular un lado o un ángulo, conocido su lado o ángulo opuesto y otro par de elementos opuestos 1.5.4.2 Teorema del Coseno para los lados En todo triángulo esférico, el coseno de un lado es igual al producto de los cosenos de los otros dos lados, más el producto de los senos de dichos lados por el coseno del ángulo comprendido entre ellos, 8 > < Cos a = Cos b Cos c + Sen b Sen c Cos Cos b = Cos a Cos c + Sen a Sen c Cos > : Cos c = Cos a Cos b + Sen a Sen b Cos 1.5.4.3 (1.28) Teorema del Coseno para los ángulos internos En todo triángulo esférico el coseno de un ángulo interno es igual a menos el producto de los cosenos de los otros dos ángulos, más el producto de los senos de los mismos ángulos por el coseno del lado adyacente a ambos, 8 > < Cos Cos > : Cos 1.5.4.4 = = = Cos Cos + Sen Sen Cos a Cos Cos + Sen Sen Cos b Cos Cos + Sen Sen Cos c (1.29) Teorema de la Cotangente En todo triángulo esférico la cotangente de un lado por el seno del otro es igual al coseno de éste por el coseno del ángulo comprendido entre ambos lados, más el seno de este ángulo por la cotangente del ángulo opuesto al primer lado, SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 19 CAPITULO 1. CONOCIMIENTOS BASICOS 8 Ctg a Sen b = Cos b Cos > > > > > Ctg a Sen c = Cos c Cos > > > < Ctg b Sen a = Cos a Cos > Ctg b Sen c = Cos c Cos > > > > > Ctg c Sen a = Cos a Cos > > : Ctg c Sen b = Cos b Cos + Sen + Sen + Sen + Sen + Sen + Sen Ctg Ctg Ctg Ctg Ctg Ctg (1.30) Los cuatro teoremas anteriores son las únicas relaciones independientes en triángulos esféricos y, por consiguiente, bastan para resolver todos los problemas solubles. 1.5.5 Algunas relaciones trigonométricas derivadas Para comodidad de operación se han derivado, de los anteriores teoremas, una gran variedad de relaciones trigonométricas. En lo siguiente, se presentan algunas que serán de utilidad más adelante. 1.5.5.1 Relación trigonométrica entre los lados de un triángulo esférico y sus alturas esféricas Sen a Sen ha = Sen b Sen hb = Sen c Sen hc p = 1 Cos2 a Cos2 b Cos2 c + 2 Cos a Cos b Cos c (1.31) que proviene, por ejemplo, de combinar las expresiones 44 y 57 (páginas 24 y 26) de la referencia [Ref. 11], cuyas demostraciones aparecen como ejercicio. 1.5.5.2 Funciones trigonométricas de los semiángulos 8 Sen p Sen(p a) 2 > > < Cos 2 = Sen b Sen c c) Sen2 2 = Sen(pSenb)b Sen(p Sen c 2 > > : Tg2 = Sen2 2 = Sen(p b) Sen(p 2 donde, Cos 2 (1.32) c) Sen p(p a) 1 (a + b + c) (1.33) 2 es el semiperímetro del triángulo esférico. Estas relaciones permiten calcular los ángulos internos de un triángulo esférico, conocidos los tres lados o el semiperímetro y dos lados. p= SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 20 CAPITULO 1. CONOCIMIENTOS BASICOS 1.5.5.3 Relación trigonométrica entre el exceso de un triángulo esférico y sus lados p 8 1 Cos2 a Cos2 b Cos2 c+2 Cos a Cos b Cos c " > Sen 2 = , Teorema de Cagnoli. > > 4 Cos a2 Cos 2b Cos 2c < 1+Cos a+Cos b+Cos c " Cos 2 = 4 Cos a Cos b Cos c 2 p 2 2 > > > : Tg " = Sen 2" = 1 Cos2 a Cos2 b Cos2 c+2 Cos a Cos b Cos c 2 Cos " 1+Cos a+Cos b+Cos c (1.34) 2 que provienen, por ejemplo, de las expresiones 351 y 359 (páginas 86 y 87) de la referencia [Ref. 11], cuyas demostraciones están presentes. SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 21 CAPITULO 2 ANGULO SOLIDO Como para toda definición matemática y su posible uso en otras ciencias, por ejemplo en la Física, es necesario entenderla lo mejor posible para así poder comprender a profundidad todas aquellas cantidades en las cuales están involucradas. En el presente capítulo se tratará la definición matemática conocida como El Angulo Sólido, que tiene numerosas aplicaciones en el campo de la Física, algunas de las cuales serán abordadas más adelante. Esta definición suele ser tratada con poca generosidad en los textos en los cuales está involucrada. En general, se le dedican pequeñas secciones y a lo más un capítulo muy resumido [Ref. 8, 13, 14, 15]. Por esta razón esta definición se intentará presentar con la mayor claridad posible para que así el lector logre entenderla y tener una idea bien clara al respecto. 2.1 Definición De la misma manera como se puede definir un ángulo plano como la relación entre la logitud del arco que se origina entre dos semirrectas que se interceptan y el radio de la circunferencia auxiliar usada, también existe una definición similar para un ángulo en tres dimensiones. Supóngase ahora que se tiene una superficie abierta en el espacio y un punto P externo a la misma. Entonces al trazar semirrectas que partan desde el punto P y toquen sin pasar a través de la misma (se pueden dibujar infinitas semirrectas), se genera un ángulo poliedro de infinitas caras, es decir, una superficie cónica como se 22 CAPITULO 2. ANGULO SOLIDO Figura 2.1: Cono formado de manera tal que las semirrectas que surgen del punto P tocan el cuerpo sin pasar nunca por su interior, es decir, lo bordean. muestra en la figura 2.1. De aquí en adelante a este ángulo poliedro se le dará el nombre de Angulo Sólido , siendo el subtendido por con respecto al punto P . Figura 2.2: Angulo sólido subtendido por un cuerpo con respecto a un punto de referencia P . Siguiendo operaciones semejantes a las del caso plano, si se dibuja una esfera auxiliar de radio R con centro en el punto P , ésta intercepta a la superficie cónica generando un sector esférico de superficie S como se muestra en la figura 2.2. La superficie S así obtenida y son homotéticas entonces, en base a lo estudiado en la sección 1.3.3, debe cumplirse la relación (1.17). La cantidad ahora tiene un significado particular pues es la medida del ángulo sólido antes mecionado. De esta manera, Angulo Sólido= Superficie del sector esférico cortado sobre la esfera auxiliar Radio de la esfera auxiliar ! = S R2 (2.1) En realidad a todos los ángulos poliedros se les denominan también ángulos sólidos. SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 23 CAPITULO 2. ANGULO SOLIDO Obviamente, aquí se cumplirá la propiedad (1.18), siendo ésta la que justifica el usar (2.1) cómo medida del ángulo sólido. En palabras: El ángulo sólido es un concepto geométrico que da una idea cuantitativa de la apertura con que se ve desde un punto una superficie determinada. Puede considerarse como el análogo tridimensional de lo que representa un ángulo en el plano, de allí su nombre. Es la cantidad que permite especificar el rango de direcciones en el espacio que pueden ser tomadas desde un punto del mismo hasta una superficie dada [Ref. 16]. Es el ángulo espacial que abarca un objeto visto desde un punto dado, que se corresponde con la zona del espacio limitada por una superficie cónica. Mide el tamaño aparente de ese objeto. En referencia a la figura 2.2, el ángulo sólido también se puede entender como la superficie mínima de un obstáculo situado sobre la esfera de radio unidad dispuesto de tal manera que un foco luminoso puntual situado en P no ilumine ningún punto de la superficie S. Es la fracción de la superficie de una esfera que cubre un objeto en particular cuando es visto por un observador situado en el centro de la misma. SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 24 CAPITULO 2. ANGULO SOLIDO 2.2 Unidades de ángulo sólido También el número real en (2.1) es adimensional al igual que en (1.1) pero, debido a que sirve para identificar un ángulo sólido, el Sistema Internacional de Unidades le atribuye la unidad Estereoradiány , el cual se simboliza como sr. De forma análoga a la definición de 1 radián, Un estereorradián (sr) es el ángulo sólido subtendido por un cuerpo con respecto al centro de una esfera auxiliar de radio R, de manera que el área interceptada por el cono sobre la superficie de la misma vale R2 , es decir, R2 1 sr = 2 R como se muestra en la figura 2.3a. Figura 2.3: (a) Definición de 1 estereorradián y (b) otras unidades para expresar ángulos sólidos. Esta unidad derivada del Sistema Internacional de Unidades (conocido por las siglas SI) no proviene del nombre propio de una persona, por lo cual su nombre (estereorradián) y su símbolo (sr), se escriben con minúscula salvo en el caso de que inicie una frase o un título. Es fácil deducir, a partir de (2.1), que una esfera completa abarcará un ángulo sólido, 4 R2 = 4 sr (2.2) = R2 Al igual que se pueden convertir radianes a grados, también puede convertir de estereorradianes a “grados cuadrados”. Si se tiene un cuadrado sobre la superficie de una esfera cuyos lados son arcos s de circunferencia correspondientes cada uno y El nombre se deriva del griego stereos para “sólida” y el radio en latín significa “rayo”. SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 25 CAPITULO 2. ANGULO SOLIDO a un ángulo plano , como se muestra en la figura 2.3b, entonces la superficie S del cuadrado viene dada por, S = s2 (2.3) entonces al sustituir aquí (1.1) para s resulta, S = R2 2 (2.4) y al sustituir este resultado en (2.1) se obtiene finalmente el ángulo sólido, = 2 radianes cuadrados (2.5) que relaciona el radián con el estereorradián. De aquí se deduce que, 1 sr = 1 rad2 (2.6) o si se usa (1.10), 1 sr = 57; 295780 2 = 3282; 80 grados cuadrados (2.7) Al igual que para los ángulos planos, se puede hablar de orientación con respecto a los ángulos sólidos. Por convenio, se dice que el ángulo sólido es positivo si desde el punto P se divisa la cara negativa (cóncava) de la superficie que subtiende el mismo. El ángulo sólido será negativo si desde P se divisa la cara positiva (convexa) de la superficie. 2.3 Expresión diferencial e integral del Angulo Sólido Supóngase ahora que se tiene una superficie plana muy pequeña dS, represen! tada vectorialmente por el vector d S perpendicular a ella, que está situada a una ! b con distancia R de un punto fijo P y que está posicionada mediante el vector R = RR ! b es un vector unitario en la dirección de R , es decir, respecto al mismo. El vector R ! b = R. R R Gráficamente, igual que antes, el ángulo sólido subtendido por dS con respecto al punto P se obtiene al trazar semirrectas desde este punto tocando dS sin pasar por su interior, como se muestra en la figura 2.4. De esta manera se obtiene una superficie cónica cuya abertura interior representa el ángulo sólido buscado, superficie que suele llamársele cono elemental, por ser dS una superficie elemental o diferencial. Por la misma razón, el ángulo sólido subtendido es también elemental o diferencial y será denotado como d . SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 26 CAPITULO 2. ANGULO SOLIDO Figura 2.4: Angulo sólido subtendido por una supeficie diferencial dS con respecto a un punto P . Figura 2.5: Diferencial de angulo sólido d un punto de referencia P . subtendido por una superficie infinitesimal dS con respecto a Para encontrar el valor numérico de d es necesario usar la definición (2.1) y, como ya se sabe de la seción antes mencionada, debe emplearse el procedimiento representado en la figura 2.5. Es decir, se dibuja una esfera unitaria auxiliar con centro en P , sobre la cual el cono intercepta una superficie dS 00 y otra esfera con centro en el mismo punto pero con radio igual a la distancia R entre P y dS, sobre la cual el cono intercepta una superficie dS 0 . Estas dos superficies son homotéticas, siendo la segunda numéricamente igual al ángulo sólido buscado y la primera, aquella que debe ser sustituida en (2.1). Entonces, dS 0 d = 2 (2.8) R Ahora para encontrar d es necesario conocer el valor de dS 0 , que (al igual que dS 00 ) ! es un sector esférico diferencial. Obviamente, R un vector normal al mismo. Es posible aproximar, como se muestra en la figura 2.6, el valor de la superficie de SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 27 CAPITULO 2. ANGULO SOLIDO Figura 2.6: Corte transversal del cono elemental de la figura 2.5. este sector esférico (por su condición diferencial) mediante una superficie diferencial ! plana dSp perpedicular a R y, por ende, tangente a dicho sector, dS 0 (2.9) dSp ! En generalz la superficie dS formará un ángulo 6= 0 con R y, por lo tanto, con la dSp . Entonces, ! ! ! R b dSp ' R d S = d S = Cos dS (2.10) R de manera que, en vista de este resultado y de (2.9), la expresión (2.8) puede ser escrita finalmente como, 8 b ! R dS > < !R2 ! 0 R dS d ' dS = (2.11) R2 R3 > : Cos dS R2 que es la expresión diferencial buscada. Para determinar el ángulo sólido subtendido por una superficie S es necesario integrar sobre toda ella (2.11) resultando, 8 R > < RS = > : RS b d! R S R2 ! ! R dS R3 Cos dS R2 S (2.12) siendo la expresión integral buscada y que puede tomarse como definición formal del ! ángulo sólido bajo el cual se ve la superficie S desde un punto de referencia P . Aquí R es cada vector con origen en P y extremo en un punto de cada dS. z La superficie dS puede ser considerada esencialmente plana debido a que es muy pequeña y, por ende, es suficiente un único ángulo para indicar su orientación. SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 28 CAPITULO 2. ANGULO SOLIDO Figura 2.7: Angulo sólido cuando P no está en el origen del sistema de coordenadas escogido. En el caso de que el punto P no se encuentre en el origen del sistema de coordenadas escogido sino que se encuentra a una posición ! r 0 de éste (ver figura 2.7), el ángulo sólido vendrá dado por la expresión, R (! r (! r 0 ; S) = S ! que en función del vector R = ! r que es la misma definición (2.12). ! ! r 0 ) d S (! r) 3 ! ! r r j 0 j (2.13) ! r 0 se puede escribir como, Z b ! R dS = R2 S (2.14) El factor R12 en el integrando de (2.14) permite relacionar a la superficie proyectada b d! R S con una superficie definida en la esfera de radio unidad (esfera auxiliar) mediante una homotecia con centro en ! r 0 , es decir, con centro en el centro de la mecionada esfera. SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 29 CAPITULO 2. ANGULO SOLIDO Figura 2.8: Se cumple que 2.4 S1 R12 = S2 R22 Sn 2 . Rn Por esta razón sirve para identificar cada ángulo sólido. Propiedades del ángulo sólido 2.4.1 Propiedad 1 Cualquiera que sea el tamaño de la esfera auxiliar, el ángulo sólido subtendido por una superficie abierta S con respecto a un punto P y, por ende la relación (2.1), se mantendrá constante si se mantiene también costante la distancia entre ambos. Esta propiedad es debida a la homotecia vista en la sección 1.3.3. Al igual como ocurre con los ángulos planos, si con centro en el punto P de la figura 2.2 se traza una esfera auxiliar de radio R1 , se obtiene una superficie S1 de manera que su cociente da como resultado la medida del ángulo sólido subtendido por el rectángulo con respecto a dicho punto. Si para la misma disposición se traza una nueva esfera auxiliar de radio R2 con centro en P se obtiene una superficie S2 dando su cociente como resultado la misma medida y así sucesivamente, es decir, = S1 S2 = 2 = 2 R1 R2 = Sn Rn2 SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. (2.15) Pág.: 30 CAPITULO 2. ANGULO SOLIDO 2.4.2 Propiedad 2 El ángulo sólido subtendido por una superficie abierta S con respecto a un punto P , es igual a la superficie que resulta sobre la superficie de una esfera unitaria centrada en P , debido a la intersección de las líneas rectas que van desde P (que en conjunto forman un cono) hasta el perímetro de S. Considérese la figura 2.9. En esta figura S es una superficie abierta cuyo ángulo sólido subtendido con respecto a P se desea calcular. Para hacer esto, como ya se vio antes, se posiciona una esfera auxiliar de radio R de tal manera que su centro coincida con P y luego se trazan líneas rectas desde P hasta el perímetro C de S, generándose así un cono con vértice en el mecionado punto. La intersección de las líneas rectas con la superficie de la esfera origina el perímetro C1 que da forma a la superficie S1 sobre la superficie de la misma. La superficie S3 (representada por la zona con entramado) es la formada por la superficie S1 más la superficie S2 de la pared del cono que se encuentra entre el perímetro C1 de S1 y el perímetro C de S, es decir, S 3 = S 1 + S2 (2.16) Figura 2.9: Proyección de la superficie S sobre la superficie de la esfera auxiliar de radio R = 1. Las superficies S y S3 poseen el mismo perímetro C con respecto a P , así mediante la propiedad anterior es posible escribir que, S = S3 SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. (2.17) Pág.: 31 CAPITULO 2. ANGULO SOLIDO y además, las superficies S3 y S1 poseen el mismo perímetro C1 con respecto a P pudiéndose escribir, (2.18) S3 = S1 entonces de este resultado y del (2.18) se puede concluir que, = S El ángulo sólido S1 (2.19) S1 se obtiene a partir de la definición de ángulo sólido (2.12) como, S1 = Z S1 ! ! r dS 1 r3 (2.20) pero aquí r = R por estar dS1 sobre la esfera auxiliar. Supóngase ahora que la esfera es unitaria, es decir, R = 1. Entonces, ! r es un vector unitario para S1 perpendicular a dS1 ! y, por ende, paralelo a d S 1 . Por lo tanto, ! ! r dS 1 = dS1 r3 resultando a partir de (2.20) que, S1 = Z (2.21) dS1 S1 o, S1 (2.22) = S1 Finalmente al sustituir el resultado (2.22) en (2.19) se obtiene, S = S1 como se quería mostrar. Por el anterior resultado se puede decir que, Se define el Angulo Sólido bajo el cual se ve una superficie desde el punto P como el área de la proyección cónica de dicha superficie sobre una esfera de radio unidad centrada en P . SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 32 CAPITULO 2. ANGULO SOLIDO Figura 2.10: Superficies que subtienden un mismo ángulo sólido P. con respecto a un punto de referencia 2.4.3 Propiedad 3 Dado un cono correspondiente a un ángulo sólido subtendido con respecto a un punto dado P , todas las superficies abiertas que estén inscritas en él subtenderán el mismo ángulo sólido con respecto a dicho punto. En la figura 2.10, las superficies abiertas S1 ; S2 ; S3 ; : : : ; Sn tienen todas curvas perimetrales inscritas en un cono común que tiene vértice en P , por lo que todas subtenderán un mismo ángulo sólido con respecto a dicho punto. Es decir, S1 = S2 = S3 = = (2.23) Sn 2.4.4 Propiedad 4 Si se tiene una superficie abierta S que genera un cono con vértice en P , subtendiendo así un ángulo sólido respecto al mismo, entonces toda superficie abierta S1 que resulte de la intersección de una superficie abierta S2 con dicho cono y de tal manera que quede inscrita éste, subtenderá el mismo ángulo sólido que S con respecto al mismo punto. Lo anterior se representa gráficamente en la figura 2.11a, para el caso en que la intersección se dé entre P y la superficie S y en la figura 2.11b, para el caso en que la intersección se dé más allá de S. Como la superficie S1 resultante de la intersección está inscrita en el cono generado por S con respecto a P , entonces por la propiedad 3 resulta que, S = S1 SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. (2.24) Pág.: 33 CAPITULO 2. ANGULO SOLIDO Figura 2.11: Intersección de una superficie abierta S2 con el cono generado por una superficie abierta S con respecto a un punto P , en la que se obtiene una superficie S1 : (a) intersección entre P y S, (b) intersección más allá de S. 2.4.5 Propiedad 5 Los ángulos sólidos subtendidos por dos superficies S1 y S2 , que comparten el mismo perímetro C con respecto a un punto P externo a ambas, subtienden ángulos sólidos iguales y opuestos en signo respecto a dicho punto. Considérese la figura 2.12. En dicha figura se muestran dos superficies S1 y S2 que poseen el mismo perímetro C con respecto al punto P y que juntas forman la superficie cerrada S. El perímetro C está determinado por todos los puntos de tangencia de la superficie cónica sobre la superficie cerrada S. Figura 2.12: Dos superficies S1 y S2 que poseen el mismo perímetro C con respecto al punto P y que juntas forman la superficie cerrada S. SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 34 CAPITULO 2. ANGULO SOLIDO ! En el caso de la superficie S1 , su diferencial de superficie d S 1 apunta hacia adentro ! de S y en el caso de S2 , su diferencial de superficie d S 2 apunta hacia afuera de la ! misma. Si el diferencial de superficie d S de S es definido de tal manera que apunte siempre hacia afuera de la misma entonces el ángulo sólido total vendrá dado por, Z ! ! Z ! ! Z ! ! r dS 2 r dS r dS 1 + (2.25) = = 3 3 r r r3 S2 S1 S {z } | {z } | 1 2 donde se ha usado la definición de ángulo sólido (2.12). Pero a partir de Teorema de Divergencia Gauss [Ref. 17], Z ! ! Z ! ! r r dS r dV (2.26) = r3 r3 V S donde V es el volumen encerrado por S con P fuera del mismo. Para resolver la integral de la derecha, se desarrollará primero su integrando. En efectox , ! ! ! ! ! r @ r @ r @ r r = e b + e b + e b (2.27) x y z 3 3 3 r @x r @y r @z r3 ! @ @ @ puesto que r = ebx @x + eby @y + ebz @z . Pero, " # " # ! xb ex + yb ey + zb ez r x y = ebx + eby 3 = 3 3 r3 (x2 + y 2 + z 2 ) 2 (x2 + y 2 + z 2 ) 2 (x2 + y 2 + z 2 ) 2 " # z (2.28) + ebz 3 (x2 + y 2 + z 2 ) 2 ya que ! r = xb ex + yb ey + zb ez y r2 = x2 + y 2 + z 2 . Entonces, al sustituir (2.28) en (2.27) resulta, # # # " " " ! ! @ @ r @ x y z r = + + r3 @x (x2 + y 2 + z 2 ) 23 @y (x2 + y 2 + z 2 ) 23 @z (x2 + y 2 + z 2 ) 32 = 2x2 + y 2 + z 2 5 (x2 + y 2 + z 2 ) 2 + x2 2y 2 + z 2 5 (x2 + y 2 + z 2 ) 2 o, ! r ! r r3 + x2 + y 2 2z 2 5 (x2 + y 2 + z 2 ) 2 =0 Ahora, si se sustituye este resultado en (2.26) se obtiene, Z ! ! r dS = =0 r3 S x (2.29) (2.30) ! @ Estos cálculos son menos tediosos si se utiliza notación indicial, mediante la cual r = ebi @x ,! r = ebi xi y i r2 = x2i (por el convenio de suma de Einstein y donde i = 1 : : : 3, x1 = x, x2 = y, x3 = z). SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 35 CAPITULO 2. ANGULO SOLIDO que al ser sutuida en (2.25) da como resultado final que, Z ! ! Z ! ! r dS 1 r dS 2 = 3 r r3 S1 S2 o, 1 = (2.31) 2 2.4.6 Propiedad 6 El ángulo sólido subtendido por una superficie cerrada S con respecto a un punto P externo a la misma, es nulo. Esta propiedad es consecuencia de la propiedad 5 y está demostrada por la expresión (2.30). La situación descrita se muestra en la figura 2.13, donde la curva perimetral C está formada por todos los puntos tangentes sobre S de las semirrectas que parten de P y pasan por los bordes de la misma. Nótese que, nuevamente, se tiene la situación representada en la figura (2.12) por lo que, S Figura 2.13: Angulo sólido a la misma. (2.32) =0 subtendido por una superficie cerrada S con respecto a un punto P externo 2.4.7 Propiedad 7 El ángulo sólido subtendido por una superficie cerrada S con respecto a un punto P interno a la misma es 4 sr. SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 36 CAPITULO 2. ANGULO SOLIDO Se tiene una superficie cerrada S como la mostrada en la figura 2.14a y se desea calcular el ángulo sólido por ella subtendido con respecto al punto P que se encuentra en su interior. Figura 2.14: (a) Superficie cerrada S con un punto P en su interior, respecto del cual se desea calcular el ángulo sólido subtendido por la misma. (b) La superficie de la esfera auxiliar quedará completamente cubierta al proyectar S sobre la misma Procediendo de la forma ya descrita, se dibuja una esfera unitaria (R = 1) auxiliar en su interior con centro en P y se procede a proyectar S sobre la superficie de la misma, como se muestra en la figura 2.14b. Obviamente esta proyección da como resultado toda la superficie S1 de la esfera auxiliar. Estonces por la propiedad 5 se tiene que, S = S1 (2.33) pero, S1 = 4 R = 4 (2.34) por ser unitaria. Entonces al sustituir este resultado en (2.36) se obtiene finalmente, = 4 sr (2.35) como se quería mostrar. 2.4.8 Propiedad 8 Si se tienen dos conos opuestos por su vértice P , los ángulos sólidos a los que corresponden ambos son iguales. A partir de la figura 2.15 es realmente obvio llegar a la conclusión de que, 1 = 2 SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. (2.36) Pág.: 37 CAPITULO 2. ANGULO SOLIDO Figura 2.15: Angulos sólidos 2.5 1 y 2 opuestos por el vértice. Diferenciales notables de ángulo sólido 2.5.1 Diferencial de ángulo sólido subtendido por un elemento de superficie Cartesiano En la figura 2.16 se observa una superficie diferencial dS que está sobre la superficie plana S. En coordenadas Cartesianas se tiene que, dS = dxdy (2.37) como se puede determinar fácilmente de la mencionada figura. Figura 2.16: Diferencial de ángulo sólido d subtendido por un diferencial de superficie Cartesiano Ahora bien, a partir de la definición de ángulo sólido (2.11) se tiene que el ángulo sólido diferencial d subtendido por la superficie diferencial dS con respecto al punto P viene dado por, Cos dS d = (2.38) R2 SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 38 CAPITULO 2. ANGULO SOLIDO o al sustituir (2.38), d = Cos dxdy R2 (2.39) pero de la figura es fácil determinar que, Cos = z R (2.40) R 2 = x2 + y 2 + z 2 (2.41) entonces al sustituir estas expresiones en (2.39) resulta finalmente, d = zdxdy (2.42) 3 (x2 +y 2 +z 2 ) 2 que es el ángulo sólido diferencial buscado. Hay que tener presente que, La expresión (2.42) es más útil cuando se desea determinar el ángulo sólido de una superficie rectangular, aunque las integrales tienden a ser difíciles de resolver. 2.5.2 Diferencial de ángulo sólido subtendido por un elemento de superficie cilíndrico En la figura 2.18 se observa una superficie diferencial dS que está sobre la superficie de una esfera de radio r = R. En coordenadas esféricas se tiene que, dS = (rd') (dr) = rdrd' (2.43) como se puede determinar fácilmente de la mencionada figura. A partir de la definición de ángulo sólido (2.11) se tiene que el ángulo sólido diferencial d subtendido por la superficie diferencial dS con respecto al punto P viene dado por, Cos dS d = (2.44) R2 entonces al sustituir (2.43) en esta expresión se obtiene, d = Cos rdrd' R2 (2.45) pero de la figura 2.18 también es fácil determinar que, Cos = z R SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. (2.46) Pág.: 39 CAPITULO 2. ANGULO SOLIDO Figura 2.17: Diferencial de ángulo sólido d subtendido por un diferencial de superficie cilíndrico. R2 = r 2 + z 2 (2.47) que al ser sustituidas en (2.45) producen el resultado final, d = zrdrd' (2.48) 3 (r 2 +z 2 ) 2 que es el ángulo sólido diferencial buscado. También puede ser escrito como, d = zdRd' R2 (2.49) Hay que tener presente que, La expresines (2.48) y (2.49) es más útil cuando se desea determinar el ángulo sólido de superficies planas que son secciones de discos. 2.5.3 Diferencial de ángulo sólido subtendido por un elemento de superficie esférico En la figura 2.18 se observa una superficie diferencial dS que está sobre la superficie de una esfera de radio r = R. En coordenadas esféricas se tiene que, dS = (r Sen d') (rd ) = r2 Sen d d' (2.50) como se puede determinar fácilmente de la figura.Para una esfera de radio R se tendrá SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 40 CAPITULO 2. ANGULO SOLIDO Figura 2.18: Diferencial de ángulo sólido d subtendido por un diferencial de superficie dS esférico. que, dS = R2 Sen d d' (2.51) Ahora bien, a partir de la definición de ángulo sólido (2.11) se tiene que el ángulo sólido diferencial d subtendido por la superficie diferencial dS con respecto al punto P viene dado por, Cos dS d = (2.52) R2 o al sustituir (2.51), d = Cos Sen d d' (2.53) ! observándose que es independiente del radio de la esfera. Por último, como d S es ! paralelo a R (puesto que aquí R es siempre perpendicular a dS) entonces = 0 resultando finalmente, d = Sen d d' (2.54) que es el ángulo sólido diferencial buscado. Hay que tener presente que, La expresión (2.54) es más útil para situaciones en las cuales es necesario determinar el ángulo sólido asociado con una sección de la superficie de una esfera, especialmente para secciones bordeadas por líneas ' constantes y constantes. SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 41 CAPITULO 2. ANGULO SOLIDO 2.6 Diferencial de superficie y diferencial de volumen en función del ángulo sólido 2.6.1 Diferencial de superficie dS El diferencial de superficie dS en coordenadas esféricas viene dado por, dS = r2 Sen d d' (2.55) como se vio en la sección anterior con referencia a la figura 2.18. Entonces, al sustituir (2.54) en esta expresión resulta, dS = r2 d (2.56) como era de esperarse por la definición de ángulo sólido (2.11). 2.6.2 Diferencial de volumen dV En la figura 2.19 se muestra un diferencial de volumen dV en coordenadas esféricas. Es fácil determinar a partir de la misma que, Figura 2.19: Diferencial de volumen dV en coordenadas esféricas. dV = (rd ) (r Sen d') (dr) = r2 Sen drd d' (2.57) entonces, al sustituir (2.54) en esta expresión resulta, dV = r2 drd SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. (2.58) Pág.: 42 CAPITULO 2. ANGULO SOLIDO que es la expresión buscada. 2.7 Ecuación para el cálculo del ángulo sólido subtendido por un triángulo utilizando trigonometría esférica y cálculo vectorial Se tiene un triángulo escaleno A0 B 0 C 0 que subtiende un ángulo sólido con respecto al punto P , como se muestra en la figura 2.20.Si ahora se dibuja una esfera Figura 2.20: Triángulo escaleno desea calcular. A0 B 0 C 0 cuyo ángulo sólido subtendido con respecto al punto P se unitaria auxiliar con centro en P , entonces se genera un triángulo esférico ABC sobre la superficie de la misma, como puede observarse en la figura 2.21. Este triángulo resulta de la intecepción del cono generado por el triángulo A0 B 0 C 0 con la superficie de la esfera unitaria auxiliar. Como se sabe de antes, debido a que la esfera auxiliar es unitaria entonces el ángulo sólido es numéricamente igual a la superficie S ABC del triángulo ABC , =S ABC (2.59) y además, a partir de (1.26), por la misma razón se cumple también que, S ABC =" (2.60) entonces, al combinar ambas expresiones resulta, =" SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. (2.61) Pág.: 43 CAPITULO 2. ANGULO SOLIDO Figura 2.21: (a) Angulo sólido subtendido por el triángulo escaleno A0 B 0 C 0 con respecto al punto P . (b) Vista ampliada del triángulo esférico resultante ABC. 2.7.1 Primer enfoque A continuación se presentará el cálculo de utilizando trigonometría esférica y cálculo vectorial [Ref. 18, 19]. Por la segunda de las relaciones trigonométricas (1.34) se tiene que, " 1 + Cos a + Cos b + Cos c Cos = (2.62) 2 4 Cos a2 Cos 2b Cos 2c la cual, debido al resultado (2.61), puede ser escrita como, Cos 2 = 1 + Cos a + Cos b + Cos c 4 Cos a2 Cos 2b Cos 2c (2.63) Esta expresión puede ser fácilmente reescrita de una forma más compacta utilizando sumatorias y productorias. En efecto, 1+ Cos 2 = 4 3 P i=1 3 Q Cos i=1 donde 1 = a, 2 =by 3 = c. Cos i (2.64) i 2 Por otro lado, de la trigonometría plana se tiene que para un ángulo que, Cos2 se cumple 1 (1 + Cos ) 2 2 1 = Sec2 Tg2 = SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. (2.65) (2.66) Pág.: 44 CAPITULO 2. ANGULO SOLIDO entonces es posible escribir, Cos2 Tg2 = 2 1 (1 + Cos ) 2 = Sec2 2 1= 2 (2.67) 1 Cos2 (2.68) 1 2 Ahora bien, al elevar al cuadrado (2.64) resulta, Cos2 2 2 3 P 1+ Cos 4 3 Q 2 Cos i=1 o, 3 P 1+ 2 Cos 2 i i=1 = = 16 i 2 2 Cos i 2 i i=1 3 Q (2.69) Cos i=1 ya que, 3 Q i=1 2 Cos i 2 = 3 Q 2 Cos2 i=1 i (2.70) 2 por las propiedades de las productorias [Ref. 20]. Entonces, al sustituir (2.67) en (2.69) se obtiene, 2 3 P 1+ Cos i i=1 2 = (2.71) Cos 3 Q 2 2 (1 + Cos i ) i=1 donde se ha tenido presente que, 3 3 1 Q 1Q (1 + Cos i ) = (1 + Cos i ) 8 i=1 i=1 2 (2.72) nuevamente, debido a las propiedades de las productorias. Al sustituir (2.71) en (2.68) resulta que, 3 Q 2 (1 + Cos i ) 1 Tg2 = i=1 2 3 2 P 1+ Cos i i=1 o, Tg 2 = " 2 3 Q (1 + Cos i ) 1+ i=1 3 P i=1 1+ 3 P Cos 2 Cos i # 12 (2.73) i i=1 SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 45 CAPITULO 2. ANGULO SOLIDO Desarrollando los términos entre corchetes se obtiene, 8 2 2 3 3 3 > P P P > > 1+ Cos i = 1 + 2 Cos i + Cos i > > > i=1 i=1 i=1 > < 2 3 3 P P 2 Cos = (Cos + Cos + Cos ) = Cos2 i + 2W i 1 2 3 > > i=1 i=1 > > 3 3 > Q Q > > (1 + Cos i ) = (1 + Cos 1 ) (1 + Cos 2 ) (1 + Cos 3 ) = Cos : i=1 i + i=1 3 P Cos i +W +1 i=1 (2.74) donde, W = Cos 1 Cos 2 + Cos 1 Cos 3 + Cos 2 Cos (2.75) 3 En vista de los anteriores resultados, la expresión (2.73) puede ser escrita ahora como, s 3 3 P Q 1 Cos2 i + 2 Cos i Tg 2 = i=1 1+ i=1 3 P Cos (2.76) i i=1 donde se ha dejado inalterado el denominador. Obsérvese ahora que el numerador de la anterior expresión es, debido a la relación trigonométrica (1.31), igual al producto Sen a Sen ha . Entonces, Sen a Sen ha Tg = (2.77) 3 P 2 1+ Cos i i=1 Considérense ahora los vectores ! r 1, ! r2 y! r 3 que posicionan respectivamente los 0 0 0 0 0 0 vértices A , B y C del triángulo A B C con respecto al punto P , como se puede ver en la figura 2.22a. Al multiplicar numerador y denominador de (2.77) por el producto de los módulos de estos tres vectores resulta, Tg 2 = r1 r2 r3 Sen a Sen ha r1 r2 r3 + r1 r2 r3 Cos a + r1 r2 r3 Cos b + r1 r2 r3 Cos c (2.78) pero, r1 r2 r3 Sen a Sen ha = r1 (r2 r3 Sen a) Cos | {z } | {z } 2 ! ! =Cos( 2 ha ) =j r 2 r 3 j siendo 2 ha el ángulo entre el vector ! r1y! r2 producto escalar resulta, r1 r2 r3 Sen a Sen ha = ! r 1 (! r2 ha = r1 j! r2 ! r 3 j Cos 2 ha (2.79) ! r 3 , por lo que al usar la definición de ! r 3 ) = [! r 1! r 2! r 3 ] , producto escalar triple SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. (2.80) Pág.: 46 CAPITULO 2. ANGULO SOLIDO Figura 2.22: (a) Vectores de posición de los vértices del triángulo plano A0 B 0 C 0 con respecto al punto P . (b) Vectores de posición de los vértices del triángulo plano A0 B 0 C 0 y de su centroide C, todos con respecto al punto P . Se muestra, además, el vector unitario n b perpendicular a la superficie del mencionado triángulo. Se ha girado con respecto al de la figura 2.21, para poder observar mejor los detalles. y además, al usar nuevamente la definición de producto escalar, 8 > r2 ! r 3) r1 r2 r3 Cos a = r1 (r2 r3 Cos a) = r1 (! > > | {z } > > > =! r2 ! r3 > > < r1 r2 r3 Cos b = r2 (r1 r3 Cos b) = r2 (! r1 ! r 3) | {z } > =! r1 ! r3 > > > > > r1 ! r 2) r1 r2 r3 Cos c = r3 (r1 r2 Cos c) = r3 (! > > | {z } : ! ! =r 1 r (2.81) 2 por lo que finalmente, = 2 Tg 1 r 1! r 2! r 3] [! ! ! r1 r2 r3 +r1 ( r 2 r 3 )+r2 (! r1 ! r 3 )+r3 (! r1 ! r 2) (2.82) que es la expresión mostrada en la referencia mencionada al principio de la presente sección. 2.7.2 Segundo enfoque Otro posible enfoque del mismo problema es el que se presenta en las referencias [Ref. 21, 22]. SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 47 CAPITULO 2. ANGULO SOLIDO Los ángulos internos , y pueden ser hallados a partir de, = Tg 1 j(! r3 ! r 1 ) (! r1 ! r 2 )j ! ! ! (r3 r 1) ( r 1 ! r 2) (2.83) Los ángulos y se hallan a partir de esta misma expresión permutando cíclicamente los índices de los vectores, es decir, = Tg 1 j(! r2 ! r 3 ) (! r3 ! r 1 )j ! ! ! (r2 r 3) ( r 3 ! r 1) (2.84) = Tg 1 j(! r1 ! r 2 ) (! r2 ! r 3 )j ! ! ! (r1 r 2) ( r 2 ! r 3) (2.85) Se debe dibujar un vector ! r c desde P hasta el centroide del triángulo plano A0 B 0 C 0 y un vector unitario n b en la dirección normal hacia afuera del mismo, como se muestra en la figura 2.22b. Bajo las anteriores condiciones se puede mostrar que el ángulo sólido por, " ! = ! rc n b jrc n bj o, + )! = ( +! rc n b j r c nbj vendrá dado (2.86) (2.87) donde se ha usado (1.24). Figura 2.23: (a) Retángulo subdividido en dos triángulos. (b) Pentágono subdividido en tres triángulos. Las expresiones (2.82) y (2.87) son muy útiles ya que pueden facilitar el cálculo del ángulo sólido subtendido por una superficie S cualquiera, pues siempre se la podrá subdividir en triángulos cuyos vértices estén sobre la misma. En los casos en que S sea un polígono, por ejemplo, puede ser subdividido en unos pocos triángulos, siendo el ángulo sólido subtendido por el mismo la suma de los ángulos sólidos de cada uno SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 48 CAPITULO 2. ANGULO SOLIDO Figura 2.24: (a) Superficie S de forma compleja representada mediante un gran número de pequeños triángulos cuyos vértices están sobre la misma. Figura tomada de la referencia [Ref. 23]. (b) Malla basada en icosaédrica con 1280 triángulos proyectados sobre una esfera. Figura tomada de la referencia [Ref. 24]. (c) Triangulación de un torso humano. Figura tomada de la referencia [Ref. 25]. de estos triángulos, como se muestra en la figura 2.23 para el caso de un tetrágono (cuadrilátero) y un pentágono. En el caso de que S sea compleja se puede subdividir en una gran cantidad de pequeños triángulos, como las mostradas en la figura 2.24 por ejemplo, empleándose luego el cálculo numérico computacional para determinar la suma de los ángulos sólidos de cada uno de ellos [Ref. 26, 21, 22, 27, 28, 24, 29]. SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 49 CAPITULO 3 ALGUNOS EJEMPLOS DE CALCULO DE ANGULOS SOLIDOS Contenido 3.1 Angulo sólido subtendido por una super…cie plana pequeña . . . . . . 51 3.2 Angulo sólido subtendido por una super…cie pequeña que está sobre una esfera . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52 Angulo sólido subtendido por un casquete esférico . . . . . . . . . . . 53 3.3 3.4 3.5 3.6 3.7 3.3.1 Conociendo de antemano la super…cie del casquete . . . . . . . . . . . . . 53 3.3.2 Sin tener de antemano la super…cie del casquete . . . . . . . . . . . . . . 54 3.3.3 Usando la propiedad 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55 Angulo sólido subtendido por un disco con respecto a un punto que se encuentra en su eje de simetría . . . . . . . . . . . . . . . . . . . . . 55 3.4.1 Usando coordenadas cilíndricas . . . . . . . . . . . . . . . . . . . . . . . . 55 3.4.2 Usando coordenadas esféricas . . . . . . . . . . . . . . . . . . . . . . . . . 57 Angulo sólido subtendido por un disco con respecto a un punto que se encuentra fuera de su eje de simetría . . . . . . . . . . . . . . . . . . 58 Diferencial de ángulo sólido subtendido por el diferencial de super…cie comprendido entre dos meridianos de una esfera con respecto al centro de la misma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59 Diferencial de ángulo sólido subtendido por el diferencial de super…cie comprendido entre dos paralelos de una esfera con respecto al centro de la misma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60 50 CAPITULO 3. ALGUNOS EJEMPLOS DE CALCULO DE ANGULOS SOLIDOS 3.8 3.9 Angulo sólido de la super…cie formada por la intersección de dos meridianos con dos paralelos de una esfera con respecto al centro de la misma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61 Angulo sólido subtendido por una esfera y un hemisferio con respecto a su centro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62 3.9.1 Esfera . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62 3.9.2 Hemisferio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63 3.10 Angulo sólido según el cual se ve el espacio comprendido en el interior de un diedro de ángulo desde un punto P de su arista . . . . . . . . 63 3.11 Angulo sólido subtendido por una de las caras de un cubo con respecto a un punto situado en el centro del mismo . . . . . . . . . . . . . . . . 64 3.11.1 En coordenadas Cartesianas . . . . . . . . . . . . . . . . . . . . . . . . . . 64 3.11.2 En coordenadas cilíndricas . . . . . . . . . . . . . . . . . . . . . . . . . . 66 3.11.3 Utilizando la expresión vectorial (primer enfoque) . . . . . . . . . . . . . 68 3.11.4 Utilizando la expresión vectorial (segundo enfoque) . . . . . . . . . . . . . 70 3.12 Angulo sólido subtendido por una placa rectangular con respecto a un punto situado en su eje de simetría . . . . . . . . . . . . . . . . . . . 73 3.13 Angulo sólido subtendido por una placa rectangular con respecto a un punto situado directamente sobre uno de sus vértices . . . . . . . 79 En general, el cálculo de ángulos sólidos para distintas situaciones resulta en expresiones integrales que deben resolverse aplicando métodos numéricos. En el presente capítulo se mostrarán algunos ejemplos ilustrativos de la forma cómo se calculan ángulos sólidos, para así familiarizar al lector al respecto. 3.1 Angulo sólido subtendido por una superficie plana pequeña Dada la superficie S plana y pequeña (ver figura 3.1) situada a una distancia R con respecto a un punto P , se quiere calcular el ángulo sólido subtendido por ella con respecto a dicho punto. Se supondrá que las dimensiones de S mucho menores que R. El ángulo sólido según (2.12) viene dado por, Z Cos dS = (3.1) R2 S SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 51 CAPITULO 3. ALGUNOS EJEMPLOS DE CALCULO DE ANGULOS SOLIDOS Figura 3.1: Angulo sólido subtendido por una superficie S plana y pequeña con respecto a un punto P situado a una distancia R de la misma. En este caso la distancia desde P a cualquier parte de la superficie S es prácticamente la misma, por lo tanto R es efectivamente constante sobre dicha superficie. Como consecuencia de lo anterior el ángulo es constante resultando, Z Cos = dS R2 S o, = 3.2 S R2 Cos (3.2) Angulo sólido subtendido por una superficie pequeña que está sobre una esfera Se tiene una pequeña superficie sobre una esfera de radio R y centro P como se muestra en la figura 3.2. Para esta sencilla situación se desea calcular el ángulo sólido que subtiende S con respecto al centro P de la esfera. Figura 3.2: Superficie pequeña S sobre una esfera de radio R y centro P . A partir de la definición para el ángulo sólido (2.12) se tiene que, Z Cos dS = R2 S SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. (3.3) Pág.: 52 CAPITULO 3. ALGUNOS EJEMPLOS DE CALCULO DE ANGULOS SOLIDOS Figura 3.3: (a) Casquete esférico y (b) Cálculo del ángulo sólido subtendido por un casquete esférico con respecto a un punto P situado en el centro de la esfera que lo genera. Se utilizan coordenadas esféricas con origen 0 en P . En este caso Entonces, = 0 y R es igual al radio de la esfera para cualquer punto sobre S. 1 = 2 R o, = 3.3 Z dS S S R2 (3.4) Angulo sólido subtendido por un casquete esférico Un casquete esférico es la parte de una esfera cortada por un plano, como se muestra en la figura 3.3a. Se calculará el ángulo sólido subtendido por el mismo con respecto a un punto P situado en el centro de la esfera que lo genera, empleando coordenadas esféricas con origen 0 situado en P . En este caso es posible hacerlo de dos formas: 3.3.1 Conociendo de antemano la superficie del casquete Con las dimensiones indicadas en la figura 3.3b la superficie S del casquete esférico viene dada por, S = 2 rh (3.5) como es fácil encontrar en la bibliografía relacionada. Por otro lado, del triángulo 40AB es fácil determinar que, r h Cos = r SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 53 CAPITULO 3. ALGUNOS EJEMPLOS DE CALCULO DE ANGULOS SOLIDOS o, h = r (1 Cos ) (3.6) que al ser sustituida en (3.5) resulta en, S = 2 r2 (1 Cos ) (3.7) Finalmente, al sustituir el resultado (3.7) en la definición para el ángulo sólido (2.1) se obtiene, S = 2 R o, = 2 (1 Cos ) (3.8) donde se ha tenido presente que R = r. 3.3.2 Sin tener de antemano la superficie del casquete Utilizando coordenadas esféricas como se indica en la figura 3.3b se tiene que el elemento de superficie dS viene dado por, dS = r2 Sen d d' que al ser sustituida en la definición para el ángulo sólido (2.12) resulta en, Z Cos Sen d d' = (3.9) (3.10) S Como la superficie del casquete está contenida completamente en la esfera se tiene que = 0 de manera que, Z 2 Z Sen eded' (3.11) = 0 0 donde se ha usado una tilde para distinguir entre la variable y el límite de integración . Se pudo haber usado directamente la integración de la expresión (2.54). Finalmente al integrar la anterior expresión se obtiene, = 2 (1 Cos ) (3.12) que, como era de esperarse, es idéntico al resultado (3.8). SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 54 CAPITULO 3. ALGUNOS EJEMPLOS DE CALCULO DE ANGULOS SOLIDOS 3.3.3 Usando la propiedad 3 Mediante el uso de la propiedad 3 (ver 2.4.3), el ángulo sólido subtendido por el casquete esférico con respecto a 0 es igual al águlo sólido subtendido por el cículo en la base del casquete con respecto al mismo punto. Este cálculo se hace en el ejemplo siguiente (donde está representado por ), obteniéndose el mismo resultado como era de esperarse. 3.4 Angulo sólido subtendido por un disco con respecto a un punto que se encuentra en su eje de simetría En la figura 3.4a se muestra un disco de superficie S y de radio b que se encuentra a una distancia h de un punto P ubicado sobre su eje de simetría. Se calculará el ángulo sólido subtendido por el disco con respecto al punto P [Ref. 13]. Figura 3.4: (a) Disco de radio b que se encuentra a una distancia h de un punto P ubicado sobre su eje de simetría y (b) Cálculo del ángulo sólido subtendido por el disco con respecto a P usando coordenadas cilíndricas. 3.4.1 Usando coordenadas cilíndricas Con la finalidad de usar (2.12) para calcular , se recubrirá toda S mediante una serie de coronas circulares concéntricas como el mostrado en la figura 3.4b. El radio interno de cada una de estas superficies es r y el radio externo es r + dr, de manera SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 55 CAPITULO 3. ALGUNOS EJEMPLOS DE CALCULO DE ANGULOS SOLIDOS que la superficie de cada corona circular viene dada por, dS = (r + dr)2 r2 = 2 rdr (3.13) donde se ha despreciado el término de segundo orden de dr0 ya que éste es infinitesimalmente pequeño. Es fácil determinar a partir del triángulo 4AP C que cada punto sobre la corona circular está a una distancia de P dada por, p R = h2 + r2 (3.14) y además, h R entonces, a partir de (2.12) el ángulo sólido buscado vendrá dado por, Z cos dS = R2 S Ahora bien, al sustituir los resultados (3.14) a (3.15) en (3.16) resulta, Z b rdr =2 h 3=2 0 (h2 + r 2 ) Cos = (3.15) (3.16) (3.17) que al ser integrada resulta finalmente en, =2 1 p h h2 +b2 (3.18) que es el ángulo sólido buscado. El resultado (3.18) pudo haberse obtenido directamente a partir de, Z 2 Z b rdrd' =h 3=2 2 0 0 (h + r 2 ) (3.19) que es la integración de (2.48). Este ángulo sólido es posible escribirlo en función del semiángulo . En efecto, a partir del triángulo 4ABP es fácil determinar que, b Tan = h o, b = h Tan (3.20) que al ser sustituida en (3.18) resulta en, = 2 (1 Por último, si es pequeño entonces Cos puede escribirse como, = (3.21) Cos ) ' 1 1 2 2 por lo que el resultado (3.21) 2 SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. (3.22) Pág.: 56 CAPITULO 3. ALGUNOS EJEMPLOS DE CALCULO DE ANGULOS SOLIDOS Figura 3.5: Cálculo del ángulo sólido esféricas. subtendido por el disco con respecto a P , usando coordenadas 3.4.2 Usando coordenadas esféricas Al usar coordenadas esféricas (ver figura 3.5), el diferencial de ángulo sólido vendrá dado a partir de (2.54), d = Sen d d' (3.23) entonces, = Z 0 2 Z Sen d d' (3.24) 0 donde es el valor que toma en el borde del disco, es decir, es el semiángulo subtendido por el disco con respecto a P . Al integrar resulta, = 2 (1 Cos ) (3.25) h + b2 (3.26) que es idéntico al resultado (3.21). Y como, Cos = p h2 que al ser sustituida en (3.25) da como resultado, =2 1 p h h2 + b2 (3.27) que es idéntico al resultado (3.18). SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 57 CAPITULO 3. ALGUNOS EJEMPLOS DE CALCULO DE ANGULOS SOLIDOS 3.5 Angulo sólido subtendido por un disco con respecto a un punto que se encuentra fuera de su eje de simetría En la figura 3.6 se muestra un disco de superficie S y de radio b que se encuentra a una distancia h de un punto P ubicado fuera de su eje de simetría. Se calculará el ángulo sólido subtendido por el disco con respecto al punto P . Figura 3.6: Cálculo del ángulo sólido para un disco de superficie S y de radio b que se encuentra a una distancia h de un punto P ubicado fuera de su eje de simetría. Del triángulo 4A0P , usando el Teorema del Coseno, es posible determinar que, R02 = r2 + d2 2rd Cos ('o ') (3.28) y usando el Teorema de Pitágoras en el triángulo 4A0P que, R02 = R2 h2 (3.29) por lo tanto, al sustituir (3.29) en (3.28) y despejando q 2 , se obtiene, R2 = h2 + r2 + d2 Además, ( 2rd Cos ('o ') Cos = Rh dS = rdrd' Ahora, a partir de (2.12) el ángulo sólido buscado Z Cos dS = R2 S (3.30) (3.31) vendrá dado por, SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. (3.32) Pág.: 58 CAPITULO 3. ALGUNOS EJEMPLOS DE CALCULO DE ANGULOS SOLIDOS Entonces, al sustituir los resultados (3.30) y (3.31) en (3.32) resulta finalmente, =h R2 Rb 0 r drd' 0 [h2 +r2 +d2 2rd Cos('o ')]3=2 (3.33) Nótese aquí que al hacer d = 0 (P está en el eje de simetría) se obtiene (3.19) como debería esperarse ya que, al hacer esto, el presente caso se reduce al estudiado en la sección anterior. Para resolver la integral (3.33) suelen aplicarse métodos numéricos, métodos semianalíticos y aproximaciones, como en las referencias [Ref. 30, 31, 32, 33, 34, 35, 36, 37, 38, 39, 40]. 3.6 Diferencial de ángulo sólido subtendido por el diferencial de superficie comprendido entre dos meridianos de una esfera con respecto al centro de la misma La figura 3.7 muestra el diferencial de superficie dS que se forma entre dos meridianos ' y ' + d' de una esfera de radio R. Se desea calcular el ángulo sólido d subtendido por este diferencial de superficie con respecto al centro de la esfera [Ref. 13]. Figura 3.7: Diferencial de superficie dS entre dos meridianos ' y ' + d' de una esfera de radio R. En coordenadas esféricas el elemento de superficie dS viene dado por, dS = R2 Sen d d' SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. (3.34) Pág.: 59 CAPITULO 3. ALGUNOS EJEMPLOS DE CALCULO DE ANGULOS SOLIDOS puesto que r = R. A partir de (2.11) el ángulo sólido d viene dado por, d = pero para el presente caso Cos dS R2 (3.35) = 0 entonces, d = dS R2 (3.36) Ahora, al sustituir (3.34) en este último resultado se obtiene, d = Sen d d' (3.37) por lo tanto el ángulo sólido d buscado vendrá dado por, Z Sen d d = d' 0 o, d = 2d' (3.38) que es el diferencial de ángulo sólido buscado. 3.7 Diferencial de ángulo sólido subtendido por el diferencial de superficie comprendido entre dos paralelos de una esfera con respecto al centro de la misma La figura 3.8 muestra el diferencial de superficie dS que se forma entre dos paralelos y + d de una esfera de radio R. Se desea calcular el diferencial de ángulo sólido d subtendido por este diferencial de superficie con respecto al centro de la esfera [Ref. 13]. Partiendo del resultado (3.37) del ejemplo anterior se puede escribir que, Z 2 d = Sen d d' (3.39) 0 resultando, d = 2 Sen d (3.40) que es el diferencial de ángulo sólido buscado. SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 60 CAPITULO 3. ALGUNOS EJEMPLOS DE CALCULO DE ANGULOS SOLIDOS Figura 3.8: Diferencial de superficie dS entre dos paralelos 3.8 y + d de una esfera de radio R.. Angulo sólido de la superficie formada por la intersección de dos meridianos con dos paralelos de una esfera con respecto al centro de la misma La figura 3.8 muestra la superficie S que se forma por la intersección de los meridianos '1 y '2 con los paralelos 1 y 2 . Calcular el ángulo sólido subtendido por S con respecto al centro de la esfera es SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 61 CAPITULO 3. ALGUNOS EJEMPLOS DE CALCULO DE ANGULOS SOLIDOS Figura 3.9: (a) Esfera de radio R. (b) Hemisferio de radio R. realmente sencillo. El diferencial de ángulo sólido d viene dado por (2.54), (3.41) d = Sen d d' entonces, = Z '2 '1 Z 2 (3.42) Sen d d' 1 que al ser integrada resulta en, = ('2 '1 ) (Cos 1 Cos 2) (3.43) que es el ángulo sólido buscado. 3.9 Angulo sólido subtendido por una esfera y un hemisferio con respecto a su centro En la figura 3.9 se muestran una esfera y un hemisferio cuyo ángulo sólido dido con respecto a su centro se desea calcular. Para ambos casos se usará la expresión (2.54), d = Sen d d' subten- (3.44) 3.9.1 Esfera Para la esfera se tiene que, = Z 0 2 Z Sen d d' 0 SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 62 CAPITULO 3. ALGUNOS EJEMPLOS DE CALCULO DE ANGULOS SOLIDOS o, (3.45) = 4 sr resultado que ya se había mencionado antes. 3.9.2 Hemisferio Para el hemisferio se tiene en cambio que, Z 2 Z 2 Sen d d' = 0 0 o, (3.46) = 2 sr como era de esperarse, pues debe ser la mitad del valor para la esfera. 3.10 Angulo sólido según el cual se ve el espacio comprendido en el interior de un diedro de ángulo desde un punto P de su arista Se desea calcular el ángulo sólido según el cual se ve el espacio comprendido en el interior de un diedro de tamaño [Ref. 13] como el de la figura 3.10. Para tal fin, obsérvese que para ver todo el espacio basta que = 2 rad, el cual como ya se sabe corresponde a un ángulo sólido de = 4 sr. Ahora bien, si para = 2 rad corresponde = 4 sr, entonces para un cualquiera corresponderá un ángulo sólido , planteamiento que define la regla de tres directa, 2 rad cuya solución para ! 4 sr ! (3.47) es, =2 (3.48) que es el ángulo sólido pedido. También es posible obtener este resultado mediante integración. El ángulo entre dos meridianos de una esfera (véase figura 3.7) también es un ángulo diedro como el mostrado en la figura 3.10. Por lo tanto, a partir (3.38) se tiene que, d = 2d' SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. (3.49) Pág.: 63 CAPITULO 3. ALGUNOS EJEMPLOS DE CALCULO DE ANGULOS SOLIDOS Figura 3.10: Angulo diedro de tamaño . Ahora, al integrar ambos miembros con ' inicial igual a 0 y ' final igual al tamaño ángulo diedro resulta, Z del d' =2 0 o, =2 (3.50) que es igual al resultado (3.48) como era de esperarse. 3.11 Angulo sólido subtendido por una de las caras de un cubo con respecto a un punto situado en el centro del mismo La figura 3.11 muestra un cubo de lado ` en cuyo centro se ha colocado el origen 0 de un sistema de coordenadas Cartesianas. Se desea calcular el ángulo sólido subtendido por una de sus caras, en este caso la cara ABCD, con respecto a un punto P situado en su centro [Ref. 41]. El cálculo se hará usando coordenadas Cartesianas y coordenadas cilíndricas. 3.11.1 En coordenadas Cartesianas El ángulo sólido viene dado a partir de la definición (2.12) por, Z Cos dS = R2 S SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. (3.51) Pág.: 64 CAPITULO 3. ALGUNOS EJEMPLOS DE CALCULO DE ANGULOS SOLIDOS Figura 3.11: Cubo de lado ` en cuyo centro se ha colocado el origen de un sistema de coordenadas Cartesianas y con respecto al cual se desea calcular el ángulo sólido subtendido por la cara ABCD. Si se usan coordenadas Cartesianas, como se muestra en la figura 3.12, es fácil encontrar al observar el triángulo 40P 0 P 00 que se cumplen las expresiones, Cos = ` 2R (3.52) `2 4 Al sustituir primero (3.52) y después (3.53) en (3.51) se obtiene, Z ` dS = 2 S x2 + y 2 + `2 32 4 R 2 = x2 + y 2 + (3.53) (3.54) pero en coordenadas Cartesianas, (3.55) dS = dxdy entonces, ` = 2 Z ` 2 ` 2 Z ` 2 ` 2 dxdy x2 + y2 + `2 4 3 2 (3.56) donde se han tenido presentes los límites de integración para x y y en concordancia con lo mostrado en la figura 3.12. También se pudo haber usado directamente la integración de la expresión (2.42) para llegar a (3.56). SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 65 CAPITULO 3. ALGUNOS EJEMPLOS DE CALCULO DE ANGULOS SOLIDOS Será realizada primero la integración con respecto a y. Utilizando 1.2.43.-17 (página 92) de la referencia [Ref. 42], Z dx x 3 = 1 (x2 A2 ) 2 A2 (x2 A2 ) 2 con A2 = x2 + `2 4 resulta, `2 = 2 Z ` 2 ` 2 x2 + `2 4 dx q (3.57) x2 + `2 2 Si ahora se utiliza 1.2.45-10 (página 94) de la referencia [Ref. 42], p Z dx 1 x A2 B 2 p = p Tg 1 p , si A2 > B 2 B A2 B 2 (x2 + B 2 ) x2 + A2 B x 2 + A2 con B 2 = `2 4 y A2 = `2 2 resulta, ` 2 1 = 2 Tg o, = q 2 3 x x2 + `2 2 ` 2 sr (3.58) Este resultado era de esperarse. En efecto, el ángulo sólido subtedido por las 6 caras del cubo con respecto al punto P es de 4 sr por cubrir todo el espacio (como ocurre para una esfera), entoces el subtendido por una de sus caras es 16 de este valor, es decir, 1 2 = (4 ) sr = sr 6 3 3.11.2 En coordenadas cilíndricas Para facilitar los cálculos, se encontrará primero el ángulo sólido subtendido por la octava parte de la cara del cubo, el triángulo rectángulo 4ABP 0 . En la figura 3.13a se muestra lo anterior en coordenadas cilíndricas r, ', z. De esta figura y a partir del triángulo 4P P 0 P 00 es fácil encontrar que, R2 = `2 + r2 4 SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. (3.59) Pág.: 66 CAPITULO 3. ALGUNOS EJEMPLOS DE CALCULO DE ANGULOS SOLIDOS Figura 3.12: Cálculo del ángulo sólido , en coordenadas Cartesianas, subtendido por la cara ABCD con respecto al punto P ubicado en el centro del cubo. manteniéndose la expresión (3.52). Entonces, al sustituir primero (3.52) y luego (3.59) en (3.51) resulta, Z ` dS (3.60) 4 = 2 S r2 + `2 32 4 pero en coordenadas cilíndricas, (3.61) dS = rdrd' entonces, 4 ` = 2 Z S rdrd' r2 + `2 4 3 2 (3.62) Se pudo haber usado directamente la integración de la expresión (2.48). El problema ahora aquí es establecer los límites de integración. Las variables r y ' están relacionadas por la ecuación de la recta que contiene al segmento AB que condiciona el límite superior para r como se puede observar en la figura 3.13b (el inferior es 0 como fácilmente se puede observar). En efecto, a partir del triángulo 4ABP 0 se puede escribir, ` Cos ' = (3.63) 2r o, ` r = Sec ' (3.64) 2 que es la ecuación de la recta que contiene al segmento AB, proporcionando el límite superior de la variable r. Ahora bien, en vista del anterior resultado (3.62) se puede SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 67 CAPITULO 3. ALGUNOS EJEMPLOS DE CALCULO DE ANGULOS SOLIDOS Figura 3.13: (a) Cálculo en coordenadas cilíndricas del ángulo sólido 4 subtendido por la porción ABP 0 de la cara BDF H del cubo con respecto al punto P . (b) Vista de la mencionada cara sobre el plano xy con la finalidad de obtener el límite superior para r en la integral (3.61). escribir ahora como, 4 ` = 2 Z 0 4 Z ` 2 Sec ' rdrde ' r2 0 + `2 4 3 2 (3.65) donde se ha usado la tilde para distinguir entre variables y límites de integración. Los límites para ' son fácilmente determinados a partir de la figura 3.13b. Ahora, al integrar (3.65) se obtiene, 1 sr (3.66) 4 = 12 Finalmente, el ángulo sólido subtendido por la cara BDF H es, =8 4 o, = 2 3 sr (3.67) como se había obtenido a partir de coordenadas Cartesianas. 3.11.3 Utilizando la expresión vectorial (primer enfoque) Al considerar nuevamente el triángulo 4ABP 0 de la figura 3.13, es fácil encontrar que los vectores de posición de sus vértices A, B y P 0 con respecto al punto P vienen SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 68 CAPITULO 3. ALGUNOS EJEMPLOS DE CALCULO DE ANGULOS SOLIDOS dados por, 8 ! ` ` > < r A = 2 ebx + 2 ebz ! r B = 2` ebx + 2` eby + 2` ebz > : ! r P 0 = 2` ebz entonces, 8 p p! ! 2 > ` r = r r = A A A > 2 > p p > ! ! 3 > > rB = r r = 2` > > p!B !B > > > r P 0 r P 0 = 2` < rP 0 = 2 ! rA ! r B = `2 > 2 > ! > rA ! r P 0 = `4 > > > 2 > ! > rB ! r P 0 = `4 > > > : [! r A! r B! r P0] = ! r A (! rB (3.68) (3.69) ! r P0) = `3 8 Ahora, a partir de (2.82) se tiene que, 4ABP 0 = 2 Tg 1 rA rB rP 0 + rA (! rB [! r A! r B! r P0] ! ! r P 0 ) + rB ( r A ! r P 0 ) + rP 0 (! rA ! r B) (3.70) donde ! rA = ! r 1, ! rB = ! r2 y! r P0 = ! r 3 , de manera que al sustituir aquí los resultados (3.69) se obtiene que, 2 3 4ABP 0 = 2 Tg 4ABP 0 = 2 Tg 4ABP 0 = 12 1 1 4 p 2+ 2 ` 2 p p 3 ` 2 ` 2 + p 2 ` 2 `3 8 `2 4 + p 3 ` 2 `2 4 + 1 p p 3+ 2+ 6 ` 2 `2 2 5 sr de manera que, =8 4ABP 0 o, = 2 3 sr (3.71) que es idéntico a los resultados (3.58) y (3.67) como era de esperarse. Para obtener el anterior resultado, también se pudo haber tomado el triángulo BDH de manera que, 8 ! ` ` ` > < r B = 2 ebx + 2 eby + 2 ebz ! (3.72) r D = 2` ebx + 2` eby + 2` ebz > : ! ` ` ` r H = 2 ebx 2 eby + 2 ebz SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 69 CAPITULO 3. ALGUNOS EJEMPLOS DE CALCULO DE ANGULOS SOLIDOS entonces, 8 p p! ! 3 > ` r = r r = B B B > 2 > p p > ! ! 3 > > rD = r r = 2` > p > p!D !D > > > r H r H = 23 ` < rH = 2 ! rB ! r D = `4 > 2 > ! > rB ! r H = `4 > > > > ! ! `2 > r r = > D H 4 > > : [! ! ! r B r D r H] = ! r B (! rD (3.73) ! r H) = `3 4 Ahora, a partir de (2.82) se tiene que, 4BDH = 2 Tg 1 [! r B! r D! r H] ! ! r H ) + rD ( r B ! r H ) + rH (! rB rB rD rH + rB (! rD (3.74) ! r D) donde ! rB = ! r 1, ! rD = ! r2 y! rH = ! r 3 , de manera que al sustituir aquí los resultados (3.73) se obtiene que, 2 3 4BDH 4BDH 4BDH = 2 Tg = 2 Tg = 3 1 1 4 p p 3 ` 2 p 3 3 3 ` 2 p p 3 ` 2 + p 3 ` 2 `3 2 `2 4 + p 3 ` 2 `2 4 + p 3 ` 2 `2 4 4 p p 3+ 3+ 3 5 sr de manera que, =2 4BDH o, = 2 3 sr (3.75) que es idéntico al resultado (3.71), como era de esperarse. 3.11.4 Utilizando la expresión vectorial (segundo enfoque) Al considerar nuevamente el triángulo 4ABP 0 de la figura 3.13, es fácil determinar que, 8 ! > r A = 2` ebx + 2` ebz > > > ! ` ` ` > > < r B = 2 ebx + 2 eby + 2 ebz ! (3.76) r P 0 = 2` ebz > > ! ` ` ` > r C = 3 ebx + 6 eby + 2 ebz > > > : n b = ebz SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 70 CAPITULO 3. ALGUNOS EJEMPLOS DE CALCULO DE ANGULOS SOLIDOS donde ! r A, ! rB y ! r P 0 son los mismos encontrados para el primer enfoque, ! r C es el vector de posición de su centroide C con respecto a P y n b es un vector unitario perpendicular a su superficie. Entonces, 8 2 2 ! ! > r B = `4 ebx + `4 ebz < rA 2 2 ! (3.77) rB ! r P 0 = `4 ebx `4 eby > : ! ! `2 r P0 r A = 4 eby a partir de los cuales, 8 > > > > > > > > < > > > > > > > > : (! r P0 ! ( r P0 (! rB (! rB ! (rA (! rA ! r A) ! r A) ! r P0) ! r P0) ! r B) ! r ) (! rA ! (rA (! r P0 (! r P0 ! (rB (! rB B ! `4 `4 ebx + 16 ebz r B ) = 16 ! r B) = 0 ! `4 r A ) = 16 ebz ! `4 r A ) = 16 ! `4 `4 ebx + 16 eby + r P 0 ) = 16 ! `4 r 0) = P 16 (3.78) `4 eb 16 z Ahora, al sustituir los resultados (3.78) en (2.83) a (2.85) se obtiene que, = Tg 1 = Tg 1 = rad 2 = Tg = Tg = 4 = Tg 3 1 `4 eb 16 x + 0 `4 eb 16 z =1 (3.79) j(! rB ! r P 0 ) (! r P0 ! r A )j ! ! ! (rB r P0) ( r P0 ! r A) 1 `4 eb 16 z `4 16 rad = Tg = j(! r P0 ! r A ) (! rA ! r B )j ! ! ! ( r P0 r A) ( r A ! r B) 1 (3.80) j(! rA ! r B ) (! rB ! r P 0 )j ! ! ! (rA r B) ( r B ! r P0) 1 rad `4 eb 16 x + `4 eb 16 y + `4 16 `4 eb 16 z SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. (3.81) Pág.: 71 CAPITULO 3. ALGUNOS EJEMPLOS DE CALCULO DE ANGULOS SOLIDOS que al ser sustituidos junto con los dos últimos resultados de (3.76) en la expresión (2.87), da como resultado, 4ABP 0 ( + + )! rC n b ! jrC n bj +4+3 2 = ` eb + 6` eby + 2` ebz ebz 3 x = = = ` 2 1 12 ` 2 ` ` ` ebx + eby + ebz 3 6 2 ebz 1 sr 12 (3.82) entonces finalmente, =8 4ABP 0 o, = 2 3 sr (3.83) resultado que es idéntico a los anteriores, como era de esperarse. Figura 3.14: Pirámide de base cuadrada. Se puede mostrar que partiendo del triángulo BDH se llega al mismo resultado siguiendo este enfoque, lo cual se deja al lector como ejercicio. Los resultados anteriores también corresponden al del ángulo sólido subtendido por una pirámide de base cuadrada con respecto al mismo punto P , cuya base tiene las dimensiones de la cara del cubo estudiado y altura igual a la distancia de ésta al mencionado punto, como se puede visualizar en la figura 3.14. Es decir, tanto la cara del cubo como la pirámide de base cuadrada subtienden el mismo ángulo sólido con SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 72 CAPITULO 3. ALGUNOS EJEMPLOS DE CALCULO DE ANGULOS SOLIDOS respecto a P bajo las condiciones antes mencionadas. En la referencia [Ref. 43] se muestra el cálculo del ángulo sólido subtendido por una pirámide de altura h y base cuadrada de lado 2b y altura h, con respecto a un punto situado en el vértice opuesto a la base y utilizando la expresión vectorial (2.82). 3.12 Angulo sólido subtendido por una placa rectangular con respecto a un punto situado en su eje de simetría Se calculará el ángulo sólido subtendido por una placa rectangular [Ref. 44, 45] de largo `1 y ancho `2 con respecto a un punto P situado en su eje de simetría a una distancia d. Se usarán coordenadas esféricas, de tal manera que su origen coincida con la posición de P y el plano que contiene a la placa sea paralelo al plano xy, como se muestra en la figura 3.15a. Este caso es, en esencia, el de la cara del cubo realizado en la sección anterior. Como se sabe de (2.54) el ángulo sólido en coordenadas esféricas viene dado por, Z Sen d d' (3.84) = S Para hallar el ángulo sólido pedido se dividirá la placa en cuatro secciones iguales como se muestra en la figura 3.15a y b, por lo tanto el ángulo sólido subtendido por la placa será 4 veces el ángulo sólido subtendido por una de ellas. Se escogerá la sección ABCP 0 , la cual se dividirá en dos secciones triangulares ABP 0 y BCP 0 . Esto se hace debido a que en la trayectoria ABC existe una discontinuidad en B que afecta a los límites de integración, como se verá en lo que sigue. Los intervalos de variación de x y y en la sección ABCP 0 son, ( 0 6 x 6 21 `2 0 6 y 6 12 `1 (3.85) El problema ahora es determinar los intervalos de variación de ' y . En coordenadas esféricas se tiene que, 8 > < x = r Sen Cos ' (3.86) y = r Sen Sen ' > : z = r Cos a partir de las cuales es muy fácil determinar que, ( ' = Tan 1 xy = Cos 1 p z (3.87) x2 +y 2 +z 2 SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 73 CAPITULO 3. ALGUNOS EJEMPLOS DE CALCULO DE ANGULOS SOLIDOS Figura 3.15: (a) Placa rectangular de largo `1 y ancho `2 , a la cual se le calcula el ángulo sólido subtendido por ella con respecto al punto P . (b) Placa vista desde +z. Intervalos de variación de ' y para la sección ABP 0 : a partir de los intervalos (3.85), la primera de las expresiones (3.87) y al observar a partir de la figura 3.15b que ' comienza en 0 resulta, `1 0 6 ' 6 Tan 1 (3.88) `2 Por otro lado, a partir de la figura 3.15b se puede determinar que el punto P 00 que barre toda la sección ABP 0 tiene como coordenadas Cartesianas, P 00 = (x; y; z) = (x; x Tan '; d) (3.89) En esta sección P 00 tiene como límite la recta x = 21 `2 en la cual está contenido el segmento AB, por lo que los puntos P 00 sobre este segmento vendrán dados mediante, P 00 = 1 1 `2 ; `2 Tan '; d 2 2 Teniendo presente este resultado y el hecho de que en esta sección se tiene a partir de (3.87) que, 06 donde Sec ' = `2 1 = 2d , 1 . Cos ' 6 Cos 1 p (3.90) comienza en 0 Cos ' 2 1 + Cos2 ' habiéndose usado la identidad trigonométrica Sec2 ' Tan2 ' = 1 y que SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 74 CAPITULO 3. ALGUNOS EJEMPLOS DE CALCULO DE ANGULOS SOLIDOS Finalmente, en la sección ABP 0 los intervalos de variación para ' y Para la sección ABP 0 ( 0 6 ' 6 Tan 1 ``12 0 6 6 Cos 1 p son, (3.91) Cos ' 2 +Cos2 1 ' Intervalos de variación de ' y para la sección BCP 0 : es obvio que en esta sección ' partirá del límite superior del intervalo para ' en (3.91) y tendrá como límite superior por lo que, 2 `1 (3.92) Tan 1 6 ' 6 `2 2 Por otro lado, a partir de la figura 3.15b se puede determinar que el punto P 00 que barre toda la sección BCP 0 tiene como coordenadas Cartesianas, y ; y; d Tan ' P 00 = (x; y; z) = (3.93) En esta sección P 00 tiene como límite la recta y = 12 `1 en la cual está contenido el segmento BC, por lo que los puntos P 00 sobre este segmento vendrán dados mediante, P 00 = `1 1 ; `1 ; d 2 Tan ' 2 (3.94) Teniendo presente este resultado y el hecho de que en esta sección se tiene a partir de (3.87) que, 06 donde Csc ' = `1 2 = 2d , 1 . Sen ' 6 Cos 1 p Sen ' 2 2 + Sen2 ' habiéndose usado la identidad trigonométrica Csc 2 ' Finalmente, en la sección BCP 0 los intervalos de variación para ' y Para la sección ABP 0 ( comienza en 0 Ctg 2 ' = 1 y que son, Tan 1 ``21 6 ' 6 2 0 6 6 Cos 1 p 2Sen ' (3.95) 2 2 +Sen ' Evaluación de la integral (3.84) en la sección ABCP 0 : en vista de la información sobre los límites de integración para ' y aportada por (3.91) y (3.95), a partir de la integral (3.84) se tiene que el ángulo sólido subtendido por la sección ABCP 0 con respecto al punto de referencia P puede ser escrita como, Z Z Sen d d' + Sen d d' ABCP 0 = ABP 0 BCP 0 SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 75 CAPITULO 3. ALGUNOS EJEMPLOS DE CALCULO DE ANGULOS SOLIDOS ABCP 0 = Z Tan Z 1 `1 `2 0 1 Cos p Cos ' 2 +Cos2 ' 1 Z Sen d d' + 0 2 Tan 1 `1 `2 Z Cos 1 p Sen ' 2 +Sen2 ' 2 (3.96) Sen d d' 0 Ahora el problema se reduce a efectuar las integraciones. Si en las integrales con respecto a se hace el cambio de variables, 8 u = Cos > > > > > du = Sen d > > < Cuando = 0 ) u = 1 (3.97) Cos ' > 1 p Cos ' > p Cuando = Cos )u= > 2 +Cos2 ' 2 +Cos2 ' > > 1 1 > > Sen ' Sen ' 1 : Cuando = Cos p )u= p 2 +Sen2 2 resulta, ABCP 0 Z = 1 `1 `2 Tan Z p Cos ' 2 +Cos2 ' 1 2 +Sen2 2 ' Z dud' 1 0 Z p 2 Tan 1 `1 `2 ' Sen ' 2 +Sen2 ' 2 dud' 1 o al integrar con respecto a u, ABCP 0 = Z 1 `1 `2 Tan 1 0 = 2 Z Tan 1 `1 `2 0 Cos ' p p 2 1 + Cos2 ' Cos 'd' 2 1 2 + Cos ' ! d' + Z 2 Tan Z 2 Tan 1 `1 `2 1 1 `1 `2 p Sen 'd' 2 2 p Sen ' 2 2 + Sen2 ' ! d' + Sen2 ' (3.98) En este momento se puede hacer que las dos integrales anteriores tengan la misma forma. En efecto, al hacer el cambio ' = 2 '0 en la segunda integral se obtiene, ABCP 0 ya que, = 2 Z 0 Tan 1 `1 `2 p Cos 'd' 2 1 + Cos2 ' Z Tan 1 `2 `1 0 8 ' = 2 '0 ) '0 = 2 ' > > > < d' = d'0 > Cuando ' = 2 ) '0 = 0 > > : Cuando ' = Tan 1 ``12 ) '0 = Tan p Cos '0 d'0 2 2 + Cos2 '0 (3.99) (3.100) 1 `2 `1 y donde se han intercambiado sus límites de integración. Se puede observar fácilmente que ambas integrales tienen ahora la misma forma. Ambas integrales en (3.99) tienen ahora la forma, Z Cos d p 2 + Cos2 SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. (3.101) Pág.: 76 CAPITULO 3. ALGUNOS EJEMPLOS DE CALCULO DE ANGULOS SOLIDOS donde es constante. Si en esta integral se efectúa el cambio de variables, 8 < u = pSen 1+ 2 pCos : du = resulta, Z p Cos d 2 2 + Cos = Z p p 1+ 2 +1 1+ 2 du 2 ) u2 (1 + d 2 = Z p du = Sen 1 u2 1 (3.102) (3.103) u+C donde C es una constante de integración y se ha usado la identidad trigonométrica Cos2 + Sen2 = 1 para encontrar que Cos2 = 1 (1 + 2 ) u2 . Esta última integral es sencilla resultando la expresión, ! Z Sen Cos d p = Sen 1 u + C = Sen 1 p +C (3.104) 2 + Cos2 1+ 2 por lo que (3.99) se puede escribir ahora como, ABCP 0 = = Sen 2 1 2 Sen ' p 1 + 21 ! Sen Tan 14 p Sen 1+ 2 Tan 1 `1 `2 Sen 0 1 `1 `2 2 1 3 5 Sen '0 p 1 + 22 1 2 Sen Tan 14 p Sen 1+ ! 1 `2 `1 2 2 Tan 0 1 `2 `1 3 5 (3.105) Ahora, según la columna correspondiente a Tan x = a en la tabla 4.3.45 (página 73) de la referencia [Ref. 46], Sen Tan 1 Sen Tan 1 `1 `2 = `2 `1 = entonces, ABCP 0 = 2 Sen 1 " ` q1 `2 1 + ` q2 `1 1 + p `1 (`21 + `22 ) (1 + 2 1) # `21 `22 `22 `21 Sen `1 =p (3.106) `21 + `22 `2 =p `21 1 " (3.107) + `22 `2 p (`21 + `22 ) (1 + y como a partir de 4.4.32 (página 80) de la referencia [Ref. 46], h 1 1 1 1 Sen z1 Sen z2 = Sen z1 1 z22 2 z2 1 z12 1 2 2 2) # i SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. (3.108) (3.109) Pág.: 77 CAPITULO 3. ALGUNOS EJEMPLOS DE CALCULO DE ANGULOS SOLIDOS resulta que, ABCP 0 = Sen 2 " p `21 + 1 `1 p 2 2 2 `22 + 21 (`21 2 (`1 + `2 ) + `2 p (`21 + `22 ) (1 + 21 ) (1 + 22 ) + `22 ) # Pero, a partir de 4.4.35 (página 80) de la referencia [Ref. 46], 8 n o 1 < Sen 1 z1 z2 [(1 z12 ) (1 z22 )] 2 o n Sen 1 z1 Cos 1 z2 = 1 1 : Cos 1 z2 (1 z12 ) 2 z1 (1 z22 ) 2 (3.110) (3.111) entonces, 1 Sen y además, debido a que como, z + Cos 1 = `2 , 2d 1 2 = Cos ABCP 0 Sen 1 z (3.112) 2 `1 = 2d , la expresión (3.110) puede escribirse ahora z= 1 2 ) Cos " s 2d 1 z= 4d2 + `21 + `22 (4d2 + `21 ) (4d2 + `22 ) # (3.113) Entonces, finalmente, el ángulo sólido buscado vedrá dado por, =4 o, = 4 Cos 1 ABCP 0 r 2d 4d2 +`21 +`22 2 2 2 +`2 4d ( 1 )(4d +`2 ) (3.114) Si en el anterior resultado se hace d = 21 `, `1 = `2 = ` (placa cuadrada), lo cual reproduciría el ejemplo estudiado en la sección anterior, se obtiene, 8 9 v u > > 2 < = 4 2` + (`)2 + (`)2 ` u u 1 h i h i = 4 Cos 2 t 2 2 > : 2 ; 4 ` + (`)2 4 ` + (`)2 > 2 = 4 Cos 1 2 p ! 3 2 o, 2 sr (3.115) 3 coincidiendo con el resultado obtenido en el mencionado ejemplo, como era de esperarse. = SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 78 CAPITULO 3. ALGUNOS EJEMPLOS DE CALCULO DE ANGULOS SOLIDOS 3.13 Angulo sólido subtendido por una placa rectangular con respecto a un punto situado directamente sobre uno de sus vértices Se desea calcular el ángulo sólido subtendido, con respecto al punto P , por una placa rectangular de dimensiones a y b [Ref. 47], como se muestra en la figura 3.16a. El punto de referencia P está situado a una distancia h directamente arriba de uno de sus vértices .Para esto, se empleará un sistema de coordenadas Cartesianas con el origen posicionado en el el vértice que está debajo de P , como se puede ver en la figura 3.16b. Figura 3.16: (a) Placa rectangular de superficie S y dimensiones a, b. (b) Para llevar a cabo el cálculo del ángulo sólido subtendido por S con respecto al punto P , se posiciona un sistema de coordenadas Cartesianas de manera que su origen coincida con el vértice que está justo debajo de dicho punto. A partir del diferencial de ángulo sólido subtendido por un elemento de superficie Cartesiano (2.42) se tiene que, d = ya que z = h. Entonces, =h hdxdy Z bZ 0 (3.116) 3 (x2 + y 2 + h2 ) 2 0 a dxdy 3 (3.117) (x2 + y 2 + h2 ) 2 SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 79 CAPITULO 3. ALGUNOS EJEMPLOS DE CALCULO DE ANGULOS SOLIDOS Al integrar primero con respecto a y, utilizando 1.2.43.-17 (página 92) de la referencia [Ref. 42], Z dx x (3.118) 3 = 1 (x2 A2 ) 2 A2 (x2 A2 ) 2 con A2 = x2 + h2 resulta de forma muy sencilla, Z a dx = hb 1 0 (x2 + h2 ) (x2 + b2 + h2 ) 2 Si ahora se utiliza 1.2.45-10 (página 94) de la referencia [Ref. 42], p Z dx 1 x A2 B 2 p = p Tg 1 p , si A2 > B 2 B A2 B 2 (x2 + B 2 ) x2 + A2 B x 2 + A2 (3.119) (3.120) con B 2 = h2 y A2 = b2 + h2 resulta, = Tg 1 bx p 2 h x + b2 + h2 a 0 o, = Tg 1 ab 1 h(a2 +b2 +h2 ) 2 (3.121) El anterior cálculo pudo haberse llevado a cabo dividiendo el rectángulo en dos triángulos, como se puede ver en la figura 3.17a. En efecto, Figura 3.17: (a) Placa rectangular dividida en dos triángulos AB0 y BC0. (b) Establecimiento de los límites de integración para el cálculo del ángulo sólido subtendido por la placa rectangular con respecto al punto P . SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 80 CAPITULO 3. ALGUNOS EJEMPLOS DE CALCULO DE ANGULOS SOLIDOS Triángulo escribir que, AB0: para este caso, según lo mostrado en la figura 3.17b, se puede AB0 =h Z a 0 Z b x a dydx 3 (3.122) (x2 + y 2 + h2 ) 2 0 a partir de la cual, realizando la integración con respecto a y, se obtiene fácilmente la expresión, Z hb a xdx q (3.123) AB0 = a 0 (x2 + h2 ) b2 2 2 1+ x +h a2 habiéndose utilizado (3.118) con A2 = x2 + h2 . Si en esta integral se hace el cambio de variable, 8 b2 2 > u = 1 + x2 + h2 2 > a > > > < 2udu = 2 1 + b2 xdx ) xdx = udu 2 a2 1+ b 2 (3.124) a > > > Cuando x = 0 ) u = h > > p : Cuando x = a ) u = a2 + b2 + h2 resulta que, AB0 hb = a Z p a2 +b2 +h2 h du 2 2 u2 + ha2b Al utilizar 1.2.10.-14 (página 41) de la referencia [Ref. 42], Z dx 1 x = Tg 1 2 2 x A A A con A2 = h2 b2 , a2 (3.126) para integrar la anterior expresión se obtiene que, AB0 o, (3.125) = Tg 1 au hb p a2 +b2 +h2 h p a a2 + b2 + h2 a Tg 1 AB0 = Tg hb b Ahora, al utilizar 4.4.34. (página 80) de la referencia [Ref. 46], 1 Tg 1 con, z1 Tg ( z1 = z2 = resulta, AB0 1 = Tg 1 z2 = Tg 1 z1 z2 1 z1 z2 p a a2 +b2 +h2 hb a b p ab a2 + b2 + h2 abh p b2 h + a2 a2 + b2 + h2 SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. (3.127) (3.128) (3.129) (3.130) Pág.: 81 CAPITULO 3. ALGUNOS EJEMPLOS DE CALCULO DE ANGULOS SOLIDOS Triángulo escribir que, BC0: para este caso, según lo mostrado en la figura 3.17b, se puede BC0 =h Z bZ 0 a y b 0 dxdy (3.131) 3 (x2 + y 2 + h2 ) 2 a partir de la cual, mediante un procedimiento análogo al seguido para el cálculo de AB0 , se obtiene el resultado, p 2 2 2 abh 1 ab a + b + h p (3.132) BC0 = Tg 2 2 2 2 a h + b a + b + h2 Nótese que AB0 6= BC0 , contrario a lo que se podría haber pensado de antemano. Esto es debido a que P está sobre un vértice que es distinto en cada triángulo. Si la placa fuese un cuadrado, es decir a = b, entonces ambos ángulos sólidos resultan idénticos. El ángulo sólido dado por, subtendido por la placa rectancular con respecto a P vendrá = AB0 + que en vista de (3.130) y (3.132) resulta en, p 2 2 2 abh 1 ab a + b + h p = Tg + Tg b2 h + a2 a2 + b2 + h2 Al utilizar aquí (3.128) con, se obtiene finalmente que, 8 > < z1 = > : z2 = = Tg 1 (3.133) BC0 1 p ab a2 + b2 + h2 abh p a2 h + b2 a2 + b2 + h2 (3.134) p 2 2 ab a2 +b p +h abh 2 b h+a2 a2 +b2 +h2 (3.135) p 2 2 ab a2 +b p +h abh 2 a h+b2 a2 +b2 +h2 " ab 1 h (a2 + b2 + h2 ) 2 # (3.136) resultado idéntico al resultado (3.121), como era de esperarse. SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 82 CAPITULO 4 ALGUNAS APLICACIONES DE LA DEFINICION DE ANGULO SOLIDO Contenido 4.1 En Electro…siología Cardíaca . . . . . . . . . . . . . . . . . . . . . . . . 84 4.2 En Magnetismo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89 4.3 En Electricidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93 4.4 En Gravitación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96 4.5 En Radiación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96 4.6 4.5.1 Intensidad de Radiación . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97 4.5.2 Intensidad de radiación medida a una distancia de la super…cie de un cuerpo negro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99 En Telecomunicaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101 4.6.1 Area efectiva de una antena . . . . . . . . . . . . . . . . . . . . . . . . . . 101 4.6.2 Temperatura de una antena . . . . . . . . . . . . . . . . . . . . . . . . . . 103 4.7 En Dispersión de Partículas . . . . . . . . . . . . . . . . . . . . . . . . . 105 4.8 En Detección de Radiación . . . . . . . . . . . . . . . . . . . . . . . . . . 109 4.8.1 Factores que afectan la e…ciencia de un detector . . . . . . . . . . . . . . 109 4.8.2 Tipos de e…ciencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111 Existe una basta cantidad de aplicaciones de la definición de ángulo sólido. En las siguientes secciones se presentará un pequeño grupo de ellas. 83 CAPITULO 4. ALGUNAS APLICACIONES DE LA DEFINICION DE ANGULO SOLIDO 4.1 En Electrofisiología Cardíaca En medicina es útil la definición de ángulo sólido, por ejemplo, en Electrofisiología Cardíaca [Ref. 48, 49, 50, 51, 52]. Figura 4.1: Electrocardiograma (ECG). Si hay alguna técnica de diagnóstico médico que conozca gran parte de la población, esa es la electrocardiográfica. Todo el mundo tiene en mente una pantalla donde se monitorizan ondas ininteligibles, asociadas en ocasiones a sonidos característicos. El electrocardiograma (ECG/EKG, del alemán Elektrokardiogramm) es la representación gráfica de la actividad eléctrica del corazón, que se obtiene con un electrocardiógrafo en forma de cinta continua, como se muestra en la figura 4.1. Es el instrumento principal de la electrofisiología cardíaca y tiene una función relevante en el cribado y diagnóstico de las enfermedades cardiovasculares, alteraciones metabólicas y la predisposición a una muerte súbita cardíaca. También es útil para saber la duración del ciclo cardíaco. Figura 4.2: Componentes de un ECG. SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 84 CAPITULO 4. ALGUNAS APLICACIONES DE LA DEFINICION DE ANGULO SOLIDO El médico evalúa el electrocardiograma en función de los valores absolutos de cada tensión, el intervalo de tiempo transcurrido entre ellas, así como su “pendiente” y duración. A partir de estos valores se pueden diagnosticar muchas alteraciones patológicas del corazón. Para interpretar un ECG, el médico se ayuda de un gráfico normalizado. Las características deflexiones hacia arriba y hacia abajo de la tensión presentes en las curvas del corazón que registra el ECG se identifican con letras (ver figura 4.2): Onda P: se caracteriza por ser la primera onda pequeña semicircular y positiva situada por encima del 0. Representa la activación auricular. Onda Q: suele ser pequeña, es decir, ni extensa ni profunda y representa la primera curva negativa después de la onda P y el final del intervalo QT. La onda Q representa el comiendo de la activación ventricular. Onda R: siempre es corta y alta. Es la primera onda positiva después de la onda Q, así como la primera onda positiva después de la onda P si no hay onda Q. La onda R representa la activación ventricular. Onda S: suele ser pequeña, al igual que la onda Q. Es la primera onda negativa después de la onda R y también representa la activación ventricular. Complejo QRS: representa la propagación del estímulo, es decir, la denominada despolarización de los ventrículos. La despolarización supone la alteración del estado eléctrico (potencial) de las células cardíacas de los ventrículos. Esto se hace perceptible en el ECG mediante el complejo QRS. De modo paralelo a la despolarización de los ventrículos tiene lugar la repolarización de las aurículas. Para ello, se produce la normalización del potencial de las aurículas después del estímulo, aunque “desaparece” el impulso de la corriente en el complejo QRS y con ello, deja de aparecer en el ECG. Onda T: es relativamente amplia, gruesa y semicircular y representa la primera deflexión positiva después del complejo QRS. Corresponde a la formación del impulso, es decir, la repolarización de los ventrículos. Tras el final de una onda T, se termina la acción eléctrica del corazón. Después de una pausa de duración determinada, comienza el siguiente ciclo. Cuanto mayor sea la frecuencia cardíaca, menor será este intervalo de tiempo. Onda U: es una onda muy pequeña, positiva, semicircular que aparece justo después de la onda T y no siempre está presente. Corresponde a la oscilación de la repolarización de los ventrículos. SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 85 CAPITULO 4. ALGUNAS APLICACIONES DE LA DEFINICION DE ANGULO SOLIDO Además de la interpretación de cada onda del ECG, también se interpretan los intervalos de tiempo entre las ondas: Segmento PQ: abarca desde el comienzo de la onda P hasta el comienzo de las ondas Q o R (cuando la onda Q no está presente). Representa el periodo de unión atrio-ventricular. Tras este término se esconde el periodo de unión del estímulo, es decir, el periodo en el que transcurre el estímulo eléctrico de las aurículas a los ventrículos. Segmento ST: abarca desde el final de la onda S o la onda R (cuando la onda S no está presente) hasta el comienzo de la onda T. Muestra el comienzo de la repolarización ventricular. Anormalidades en este segmento pueden indicar serios problemas. Intervalo QT: (segmento) abarca el complejo QRS, el segmento ST y la onda T. El intervalo que transcurre entre el comienzo de la propagación del estímulo hasta el final de la repolarización ventricular comprende la contracción de los ventrículos (sístole ventricular) eléctrica. El corazón en un momento determinado tiene un número de células que se encuentran en una situación eléctrica diferente de las demás, lo que define unos límites de activación y cada uno de ellos genera un número infinito de dipolos. Para determinar determinar la magnitud del potencial registrado en un electrodo cualquiera, es necesario sumar la contribución de todos los dipolos que hacen parte de cada límite de activación. El equivalente de esta suma será un Angulo Sólido. Figura 4.3: Angulo sólido subtendido por la zona explorada con respecto al electrodo considerado como un punto P . SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 86 CAPITULO 4. ALGUNAS APLICACIONES DE LA DEFINICION DE ANGULO SOLIDO El límite de la superficie (límite de activación), lamada superficie isquémica , está definido por las zonas del corazón con diferentes potenciales de transmembrana Vm1 y Vm2 (ver figura 4.3). El punto P observador corresponde a cualquiera de los electrodos que se colocan en la superficie corporal para registrar el ECG. La magnitud del ángulo sólido es directamente proporcional al radio de los límites de activación e inversamente proporcional a la distancia entre el corazón y el electrodo observador. Es decir, mientras más grande sea la superficie explorada (zonas con diferentes potenciales de transmembrana) mayor será el ángulo sólido y mientras más lejos se encuentre el electrodo observador de la superficie a explorar menor será el ángulo sólido, esto se puede observar en la figura 2.11 mostrada en el capítulo 1 donde los observadores son los electrodos y la pantella es la zona explorada. Lo anterior explica el por qué a los pacientes con enfisema pulmonar se observa un trazo electrocardiográfico característicamente de bajo voltaje (aumenta la distancia entre el electrodo del pecho y el corazón, es decir, magnitud inversamente proporcional a la distancia). Así mismo, los potenciales registrados en el ECG son directamente proporcionales al ángulo sólido y a la diferencia de potencial entre los límites de la superficie que en un momento determinado esté siendo explorada. Existen dos formas de influir sobre el potencial obtenido en el electrodo observador: 1. Modificando el tamaño de la superficie a explorar (límites de activación): si se aumenta el tamaño de la superficie isquémica se aumenta la magnitud del potencial registrado en el electrodo observador (ver figura 4.4). Esto es lo que se conoce con el nombre de “influencia espacial”. Es una influencia netamente geométrica e independiente del potencial de acción de las células cardíacas. 2. Modificando la diferencia de potencial en los límites de la superficie a explorar: sin necesidad de aumentar el tamaño de la superficie isquémica, se puede aumentar la magnitud del potencial registrado con el sólo hecho de aumentar la diferencia entre los voltajes de transmembrana (Vm1 Vm2 ) de la zona a explorar, como se muestr en la figura 4.5. A este fenómeno se le llama “influencia no espacial”, porque es independiente de la geometría cardíaca y sólo tiene que ver con el potencial de acción. En medicina, se denomina isquemia al estrés celular causado por la disminución transitoria o permanente del riego sanguíneo y consecuente disminución del aporte de oxígeno (hipoxia), de nutrientes y la eliminación de productos del metabolismo de un tejido biológico. Este sufrimiento celular puede ser suficientemente intenso como para causar la muerte celular y del tejido al que pertenece (necrosis). Una de las funciones principales de la sangre es hacer que el oxígeno tomado por los pulmones y nutrientes circulen por el organismo y lleguen a todos los tejidos del cuerpo. SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 87 CAPITULO 4. ALGUNAS APLICACIONES DE LA DEFINICION DE ANGULO SOLIDO Figura 4.4: Influencia espacial: el ángulo sólido subtendido por la frontera se incrementa después de incrementar la superficie isquémica, aumentando también la desviación del segmento ST. Figura 4.5: Influencia no espacial: la posición del electrodo, el tamaño de la superfície isquémica y el ángulo sólido se mantienen invariantes. Sin embargo, la diferencia de potencial entre los voltajes transmembrana se ha ampliado y se ha intensificado el flujo de corriente (flechas). Como resultado, aumenta la desviación del segmento ST. De acuerdo con lo anterior: La magnitud de la elevación del segmento ST registrada en un electrodo durante un proceso coronario agudo, es funcion de: el ángulo sólido que se crea entre los límites de la superficie isquémica y la localización del electrodo (influencias espaciales) y de la diferencia de potenciales de transmembrana de la zona enferma con respecto a la normal (influencias no espaciales). SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 88 CAPITULO 4. ALGUNAS APLICACIONES DE LA DEFINICION DE ANGULO SOLIDO 4.2 En Magnetismo El concepto de potencial es muy útil en la Física. Particularmente en electrostática este concepto tiene dos propiedades bastante diferentes: 1. La diferencia entre los potenciales de dos puntos es igual al trabajo necesario para mover una unidad de carga entre ellos. 2. Simplifica los cálculos relacionados con los campos de tal manera que es posible plantearse sólo una suma de potenciales para luego derivarlo, en lugar de tener que hacer una suma separada para cada componente del campo. En magnetostática existe, bajo ciertas circunstancias, una función escalar que presenta la segunda propiedad antes mencionada: su gradiente proporciona el campo ! B . Sin embargo, no posee una propiedad análoga a la primera debido a que dicha función escalar no es univaluada, siendo esto de poca importancia en la práctica debido a que no existen cargas magnéticas libres y raramente es necesario calcular el trabajo requerido para mover una desde un punto a otro. ! Figura 4.6: Campo B originado por una corriente I que en un circuito C, calculado en el punto P . La función escalar antes mencionada recibe el nombre Potencial Escalar Magnético M . Para el caso de un circuito de corriente, el potencial M es proporcional al ángulo sólido subtendido por el mismo con respecto al punto P donde se desea calcular M . Antes de mostrar esto es necesario conocer la Ley de Biot-Savart [Ref. 53, 54, 55], SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 89 CAPITULO 4. ALGUNAS APLICACIONES DE LA DEFINICION DE ANGULO SOLIDO En el caso de una corriente que circula por un circuito filiforme cer! rado C (ver figura 4.6), un elemento infinitesimal de longitud d ` del circuito recorrido por una corriente I, crea una contribución elemental de ! campo magnético d B en un punto P situado en la posición que apunta ! el vector ! r a una distancia r respecto de d ` , quien apunta en la dirección de la corriente I, ! ! rb 0I d l dB = (4.1) 2 4 r donde 0 = 4 :10 7 AN2 (en el SI) es la permeabilidad magnética del vacío. Esta ley, que data de 1820 y es llamada así en honor de los físicos franceses Jean! Baptiste Biot y Felix Savart. Puesto que la corriente I y, en consecuencia, el campo B no son funciones del tiempo, este último es llamado Campo Magnetostático. Es una de las leyes fundamentales de la magnetostática, tanto como la Ley de Coulomb lo es en electrostática. Figura 4.7: (a) Mover P una cantidad d! r manteniendo fija la posición del circuito, es equivalente a mover todo el circuito (o cada uno de sus puntos) una cantidad d! r manteniendo P fijo, de aquí que se genere una superficie semejante a una cinta como la indicada por la zona rayada. ! (b) Pequeña superficie d S en forma de cinta mostrada por la zona sombreada. Ahora bien, considérese nuevamente un circuito de corriente de cargas como el mostrado en la figura 4.6. Para definir la normal positiva a la superficie que encierra el circuito se hace que la dirección de la corriente lleve la misma que indica un tornillo de rosca derecha en su avance. Si se desplaza P una distancia infinitesimal d! r , a partir de la forma integrada de (4.1) es posible escribir [Ref. 56], ! Z ! ! I d l r b 0 d! r B = d! r (4.2) 4 r2 SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 90 CAPITULO 4. ALGUNAS APLICACIONES DE LA DEFINICION DE ANGULO SOLIDO Mover P una cantidad d! r manteniendo fija la posición del circuito, es equivalente a mover todo el circuito (o cada uno de sus puntos) una cantidad d! r manteniendo P fijo, de aquí que se genere una superficie semejante a una cinta como la indicada por la zona rayada en la figura 4.7a. El valor del miembro derecho de (4.2) permanece constante si primero se evalúa la integral y después se efectúa el producto escalar ! r y con d! r o al efectuar primeramente el producto escalar del integrando d lr2 rb con d! después evaluar la integral alrededor de todo el circuito, por lo que es posible escribir (4.2) ahora como, Z d! l rb d! r ! I d! r B = 0 (4.3) 4 r2 ! Póngase atención en el producto escalar d l rb d! r . Como es sabido, la regla del producto escalar triple establece que, ! A entonces, y como, resulta que, ! B ! ! C = B ! dl ! A ! dl rb ! B = rb ! C ! ! A = C ! dl d! r = d! r ! B ! ! A =B h ! d! r = dl ! A ! A ! B rb i ( d! r ) rb (4.4) (4.5) (4.6) (4.7) entonces ahora (4.3) se puede escribir como, h i ! Z d! l ( d r ) rb ! I d! r B = 0 (4.8) 4 r2 ! ! La expresión d l ( d! r ) es un vector que representa la pequeña superficiey d S en forma de cinta mostrada por la zona sombreada en la figura 4.7b, ! ! dS = d l y ( d! r) (4.9) ! ! ! siendo d l ( d! r ) rb = d S rb la proyección de d S sobre un plano perpendicular a ! r. Entonces es posible escribir ahora el integrando de (4.8) como, h ! i dl ( d! r ) rb d! S rb = =d (4.10) 2 r r2 Recuérdese que la magnitud del producto vectorial es igual a la superficie del paralelogramo formado por los vectores que están como factores del producto, por lo tanto el vector resultante representaría vectorialmente dicha superficie. SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 91 CAPITULO 4. ALGUNAS APLICACIONES DE LA DEFINICION DE ANGULO SOLIDO donde se ha usado la definición de ángulo sólido (2.11). Aquí d representa el ángulo sólido subtendido por la superficie dS con respecto al punto P . Por lo tanto, la integral sobre el circuito cerrado C proporciona el ángulo sólido completo subtendido por la cinta. Figura 4.8: Angulo sólido d subtendido por la superficie dS con respecto al punto P donde es calcu! lado el campo B . La interpretación de (4.10) es clara: cuando P es desplazado d! r , el ángulo sólido subtendido por todo el circuito con respecto a P cambia d . Equivalentemente, si se mantiene P fijo y se mueve cada punto del circuito d! r (esto es desplazar el circuito entero) entonces el cambio en el ángulo sólido es igualmente d . El ángulo sólido d es mostrado en la figura 4.8, donde representa la disminución del ángulo sólido completo subtendido con respecto a P , lo cual ocurre cuando P se mueve una distancia d! r con respecto al circuito o cuando el circuito se mueve d! r con respecto a P . Por lo tanto es posible escribir, h i Z d! l ( d! r ) rb = d (4.11) r2 pero como es una función escalar, por lo que, Z h ! dl que al ser sustituido en (4.8) resulta, ! d =r d! r i ( d! r ) rb = r2 ! d! r B = 0I ! 4 r (4.12) ! r d! r (4.13) d! r SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 92 CAPITULO 4. ALGUNAS APLICACIONES DE LA DEFINICION DE ANGULO SOLIDO o, ! B = 0I 4 ! r (4.14) que representa la forma de ángulo sólido de la Ley de Biot-Savart o la Ley de Amperez . Esta expresión también puede ser escrita como, ! ! B =r M (4.15) con, M = 0I 4 (4.16) ! ! ! el potencial escalar magnético. La dirección de B es la de r de modo que B apunta hacia afuera del circuito a lo largo de su normal positiva. Si dos circuitos de corriente idénticos están muy cercanos el uno del otro, pero transportan corrientes en direcciones opuestas, es claro que los campos que producen se cancelarán mútuamente. Con la convención para los signos de los ángulos sólidos mencionada en el capítulo 1, la matemática reproduce este obvio resultado físico. 4.3 En Electricidad En electrostática, por ejemplo, la definición de ángulo sólido es útil a la hora de ! estudiar el campo elétrico E originado por una carga, grupo de cargas o una distribución continua de cargas que se encuentran en el interior o en el exterior de una superficie cerrada S. Su aplicación da origen a la Ley de Gauss [Ref. 57, 55, 58, 59]. (1) Cuando la carga se encuentra en el interior: supóngase que se tiene una carga puntual q en el interior de una superficie cerrada S como se muestra en la figura 4.9. ! Se sabe de los cursos de Física General que el campo eléctrico E originado por esta carga es, ! 1 q rb (4.17) E = 4 "0 r 2 2 donde "0 = 8; 85:10 12 NCm2 es la permitividad del vacío Al multiplicar escalarmente am! bos miembros de la anterior expresión por el vector diferencial de superficie d S de S resulta, ! ! ! q rb d S E dS = (4.18) 4 "0 r 2 donde el producto escalar que aparece en el segundo miembro, se interpreta como la proyección del elemento diferencial de superficie sobre un plano perpendicular al z ! Esta expresión es análoga a la electrostática E = ! rV . SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 93 CAPITULO 4. ALGUNAS APLICACIONES DE LA DEFINICION DE ANGULO SOLIDO Figura 4.9: Carga q encerrada en una superficie S. vector, es decir, ! dS 0 = rb d S (4.19) de manera que (4.18) se puede escribir ahora como, ! ! E dS = q dS 0 4 "0 r 2 (4.20) ! En este punto el campo eléctrico E originado por la carga q puede ser relacionado con la definición de ángulo sólido. En efecto, a partir de (2.11) se tiene que, dS 0 = r2 d (4.21) puesto que para el presente estudio R = r. Aquí d representa el ángulo sólido subtendido por dS con respecto al punto donde se encuentra ubicada q en el interior de S. Entonces, al sustituir (4.21) en (4.20) se obtiene, ! ! E dS = q d 4 "0 (4.22) que al ser integrada sobre toda la superficie S resulta en, Z Z ! ! q E dS = d (4.23) 4 "0 S S R Pero S d es el ángulo sólido subtendido por la superficie S con respecto al punto donde se encuentra la carga q y como ésta se encuentra en el interior de S entonces, Z d =4 (4.24) S Finalmente, al sustituir el resultado (4.24) en (4.23) se obtiene, R ! ! E dS = S q "0 SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. (4.25) Pág.: 94 CAPITULO 4. ALGUNAS APLICACIONES DE LA DEFINICION DE ANGULO SOLIDO Esta expresión es la que se conoce como forma integral de la Ley de Gauss. La misma puede enunciarse como: ! El flujo saliente del campo eléctrico E a través de cualquier superficie cerrada S es igual a la carga q contenida dentro de la superficie, dividida por la constante "0 . Aquí a S suele llamársele Superficie Gaussiana. La ley de Gauss es una de las ecuaciones de Maxwell, y está relacionada con el teorema de la divergencia, conocido también como teorema de Gauss. Fue formulado por Carl Friedrich Gauss en 1835. Para aplicar la ley de Gauss es necesario conocer previamente la dirección y el sentido de las líneas de campo generadas por la distribución de carga. La elección de la superficie gaussiana S dependerá de cómo sean estas líneas. El razonamiento anterior puede extenderse para una distribución discreta o continua de cargas, de manera que en el segundo miembro aparecerá la totalidad de las cargas encerradas por S. (b) Cuando la carga se encuentra en el exterior: se estudiará ahora qué sucede con el campo elétrico producido por cargas que se encuentren fuera de la superficie cerrada S. Para este caso, como se muestra en la figura 4.10, se pueden escribir el siguente par de expresiones, ! ! ! q rb d S a (4.26) Ea dS a = 4 "0 ra2 ! ! ! q rb d S b Eb dS b = (4.27) 4 "0 rb2 Análogamente a como se hizo en (a), estas dos expresiones pueden ser escritas en función del ángulo sólido como, ! ! Ea dS a = ! ! Eb dS b puesto que dSa0 = q d 4 "0 q = d b 4 "0 ! ! rb d S a y dSb0 = rb d S b . Como d a (4.28) a =d (4.29) a = d entonces, ! ! Ea dS a = (4.30) ! ! Eb dS b (4.31) q d 4 "0 q = d 4 "0 SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 95 CAPITULO 4. ALGUNAS APLICACIONES DE LA DEFINICION DE ANGULO SOLIDO Figura 4.10: Carga q fuera de la superficie S. El signo negativo en (4.30) indica que se trata de un flujo de campo entrante. En las expresiones (4.30) y (4.31) se observa como las contribuciones al flujo total se anulan, esto es, el flujo debido a una carga externa, atraviesa dos veces a la superficie S, una vez entrando y otra vez saliendo. También aquí es posible extender el razonamiento para una distribución discreta o continua de cargas externa a S. La contribución será en todo caso nula. 4.4 En Gravitación Empleando un razonamiento análogo al anterior, partiendo de la expresión para el cálculo del vector de campo gravitacional ! g, ! g = G m rb r2 (4.32) del campo originado por una masa m que se encuentra en algún lugar en el interior de la superficie cerrada S, es posible encontrar la expresión de la forma integral de la Ley de Gauss para el campo gravitacional [Ref. 60,61]. En este caso se llega a la expresión, R ! ! g dS = S 4.5 4 Gm (4.33) En Radiación La definición de ángulo sólido es fundamental en el estudio de la radiación pues es útil para definir algunas magnitudes que se emplean para el estudio de la misma. SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 96 CAPITULO 4. ALGUNAS APLICACIONES DE LA DEFINICION DE ANGULO SOLIDO 4.5.1 Intensidad de Radiación Antes de definir la intensidad de radiación es necesario definir: Potencia de radiación y la densidad de flujo radiante. (a) Flujo de Radiación o Potencia de Radiación P : es la cantidad de energía radiante E emitida en el espacio por una fuente luminosa por unidad de tiempo, P = E t (4.34) cuya unidad de medida es el watt (W ), [P ] = [E] J = =W [t] s (4.35) (b) Densidad de flujo luminoso f : es la potencia por unidad de superficie, f= P S (4.36) y es la parte de la potencia de radiación total emitida por una fuente de luz que es capaz de afectar el sentido de la vista. Su unidad de medida es, [f ] = [P ] W = 2 [S] m (4.37) La intensidad de radiación I (brillo), véase la figura 4.11, es una magnitud que define la cantidad de energía por unidad de tiempo (potencia) que llega desde una dirección dada, desde una fuente extendida (no puntual). Esta magnitud se determina mediante, E I= (4.38) tS donde, S es la superficie colectora de energía, perpendicular a la dirección de medición(metros cuadrados). es el elemento de ángulo sólido (estereorradian). E es la energía que entra en el cono proveniente de la dirección seleccionada (joule). En esta expresión se observa claramente la importancia que tiene el concepto de ángulo sólido en la definición de la intensidad de radiación, dotándola de direccionalidad. La unidad de intesidad de radiación es: [I] = [E] W = 2 [t] [S] [ ] m sr SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. (4.39) Pág.: 97 CAPITULO 4. ALGUNAS APLICACIONES DE LA DEFINICION DE ANGULO SOLIDO Figura 4.11: Intensidad de radiación La intensidad de radiación, al usar (4.34) también puede ser obtenida mediante, I= P S (4.40) definiéndola como la potencia óptica P emitida por unidad de ángulo sólido unidad de superficie de la superficie emisora S. Y al usar (4.36) mediante, I= f , por (4.41) Para tener una idea gráfica de como se puede medir la intensidad de radiación proveniente de varias direcciones, se puede pensar que cuando se observa una fotografía, las áreas más brillantes de la figura corresponden a las direcciones de mayor Intensidad de radiación y viceversa para las oscuras. Con esto, queda claro que la intensidad de radiación es lo que normalmente se denomina “brillo superficial”. La Intensidad de radiación sólo tiene sentido para superficies radiantes. Cuando se trata de fuentes puntuales la definición carece de sentido pues el angulo sólido subtendido por la fuente tiende a cero (en I este ángulo está en el denominador). La potencia radiante proviene desde distintas fuentes que presentan sus propias intensidades de radiación, como se muestra en la figura 4.12. Si las fuentes poseen tamaños aparentes (ángulos sólidos) pequeños, se puede evaluar la densidad de flujo como, f = I1 1 Cos 1 + I2 2 Cos 2 + + In n Cos n (4.42) Cada fuente individual contribuye con su densidad de flujo parcial. El factor Cos n tiene ! en cuenta la inclinación de la fuente radiante respecto a la normal N a la superficie colectora. SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. Pág.: 98 CAPITULO 4. ALGUNAS APLICACIONES DE LA DEFINICION DE ANGULO SOLIDO Figura 4.12: La densidad de flujo f es la medida de la potencia radiante que pasa por la superficie S desde todo el espacio circundante. Aquí se supone que debajo de S no hay fuentes. Si una fuente de gran intensidad de radiación (I grande) se aleja mucho del observador como para hacer que su ángulo sólido ! 0, pero el producto I no se hace cero, se está ante lo que llama “Fuente Puntual”. Un ejemplo lo puede proveer una estrella, ya que su tamaño no es apreciable ( ! 0), ni con telescopios y sin embargo su brillo superficial (intensidad de radiación) I es suficientemente grande para que el producto I sea el adecuado para que la pueda ser vista. 4.5.2 Intensidad de radiación medida a una distancia de la superficie de un cuerpo negro En un experimento se coloca una superficie emisora Se de un cuerpo negro a una distancia d de una superficie receptora Sr paralelas entre sí, a fin de medir la intensidad de radiación y el brillo b, como se muestra en la figura 4.13a. Se utilizará el subíndice r para indicar la superficie receptora y e para indicar la emisora. La potencia Pr que llega a la superficie receptora Sr desde la superficie emisora Se , según (4.40), es obtenida mediante, Pr = I S e 1 (4.43) pero de la definición de ángulo sólido (2.1), 1 = Sr d2 SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. (4.44) Pág.: 99 CAPITULO 4. ALGUNAS APLICACIONES DE LA DEFINICION DE ANGULO SOLIDO Figura 4.13: (a) Angulo sólido subtendido por la superficie receptora Sr con respecto a la superficie emisora Se (b) Angulo sólido subtendido por la superficie emisora Se con respecto a la superficie receptora Sr . que es el ángulo sólido subtendido por Sr visto desde Se , como se muestra en la figura 4.13a. Entonces al sustituir (4.44) en (4.45) resulta, Se d2 Pr = I S r (4.45) pero aplicando nuevamente la definición de ángulo sólido (2.1), 2 = Se d2 (4.46) en correspondencia con la figura 4.13b. Entonces al sustituir esta expresión en (4.45) se puede escribir, Pr = I S r 2 (4.47) Ahora, al sustituir (4.47) en (4.36) da como resultado, f= Pr =I Sr (4.48) 2 de aquí que la intensidad de radiación percibida por Sr (el brillo) es, I= f (4.49) 2 significando que, El brillo percibido desde un emisor de superficie extendida es independiente a la distancia d a ella. Pág.: 100 SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. CAPITULO 4. ALGUNAS APLICACIONES DE LA DEFINICION DE ANGULO SOLIDO 4.6 En Telecomunicaciones Una antena es un dispositivo (conductor metálico) diseñado con el objetivo de emitir o recibir ondas electromagnéticas hacia el espacio libre. Una antena transmisora transforma energía eléctrica en ondas electromagnéticas, y una receptora realiza la función inversa. Existe una gran diversidad de tipos de antenas. En unos casos deben expandir en lo posible la potencia radiada, es decir, no deben ser directivas (ejemplo: una emisora de radio comercial o una estación base de teléfonos móviles), otras veces deben serlo para canalizar la potencia en una dirección y no interferir a otros servicios (antenas entre estaciones de radioenlaces). Las características de las antenas dependen de la relación entre sus dimensiones y la longitud de onda de la señal de radiofrecuencia transmitida o recibida. Si las dimensiones de la antena son mucho más pequeñas que la longitud de onda las antenas se denominan elementales, si tienen dimensiones del orden de media longitud de onda se llaman resonantes, y si su tamaño es mucho mayor que la longitud de onda son directivas. 4.6.1 Area efectiva de una antena Para determinar la superficie efectiva de una antena es necesario hallar primeramente la superficie efectiva de un radiador isótropo. Un radiador isótropo es un dispositivo que puede irradiar al espacio uniformemente para todas las direcciones toda la energía que entra en él desde un generador. El sol puede ser considerado un radiador isótropo. Por otro lado, una resistencia R cualquiera a una temperatura absoluta T mayor a 0 0 K, es un generador de ruido blanco que puede transmitir esa potencia a un circuito al que esté conectada. En el caso mostrado en la figura 4.14, la resistencia que hace de carga para la que genera el ruido está a 00 Kelvin (no produce ruido). Si el valor de la resistencia de carga es el mismo que el de la emisora de ruido (existe adaptación de impedancias), la transferencia de potencia será máxima, siendo su valor dado por, (4.50) Pr = kT independiente del valor de la resistencia. Aquí Pr es la potencia de ruido, k es la constante de Boltzmann 1; 38:10 23 0JK y T temperatura absoluta de R (0 K). El descubrimiento Pág.: 101 SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. CAPITULO 4. ALGUNAS APLICACIONES DE LA DEFINICION DE ANGULO SOLIDO Figura 4.14: (a) Emisión de potencia desde la resistencia al espacio y (b) el radiador captura potencia desde el espacio debido a su intensidad de radiación. de este fenómeno fué realizado por Nyquist y estableció que el espectro de esta potencia es plano (independiente de la frecuencia), por lo menos dentro del rango de frecuencias de interés. Combinando las propiedades de emisión del radiador isótropo con las generadoras de potencia de una resistencia a temperatura TR , es posible conectarlos y hacer que se establezca un equilibrio termodinámico entre la emisión de la potencia generada por la resistencia desde el radiador al espacio y la recibida por el radiador desde el espacio, que tiene una temperatura de brillo Te (ver figura 4.14), Emisión Pr = kTr Recepción Pe = Si If (4.51) e observándose la aplicación de la definición de ángulo sólido. Aquí Si es la superficie efectiva del radiador isótropo, Pr es la potencia de ruido irradiada por el radiador isótropo, Pe es la potencia capturada por el radiador isótropo e If es la intensidd de radiación (brillo) del espacio. El ángulo sólido e es el de todo el espacio que, como se sabe, es de 4 sr. El brillo del espacio B viene dado por, Rayleigh-Jeans, B = If = kTe (4.52) 2 Igualando las potencias Pr y Pe de (4.51) por estar en equilibrio termodinámico (Tr = Te ) resulta, Si = 2 (4.53) 4 que es la superficie efectiva buscada para un radiador isótropo, que será tomada como referencia para encontrar la superficie efectiva de una antena. La superficie efectiva de una antena cualquiera Sant resulta ser el producto de la superficie efectiva de un radiador isótropo por la ganancia G de la antena, (4.54) Sant = Si G Pág.: 102 SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. CAPITULO 4. ALGUNAS APLICACIONES DE LA DEFINICION DE ANGULO SOLIDO o al usar (4.53), Sant = 2 4 (4.55) G 4.6.2 Temperatura de una antena Con frecuencia se determina la potencia en función de la temperatura absoluta, lo cual es posible a través de la ecuación de Nyquist (4.50) vista en la sección anterior. Supóngase que se tiene una antena de la que se conoce su diagrama de radiación. En la figura 4.15, con el diagrama real (a) se puede estimar cuál es la ganancia media G de los lóbulos laterales. Si la antena actúa como emisora el valor de G dará una idea de la potencia que se desperdiciará en direcciones no deseadas. La ganancia máxima Gmax corresponde al lóbulo principal de ángulo sólido 0 . El diagrama (b) se muestra una simplificación del diagrama de radiación que permite estimar su performance. Se debe tener en cuenta que existe una relación entre la ganancia y el ancho del haz (ángulo sólido del lóbulo principal), Z Gd = 4 (4.56) S debido a que la integración se realiza sobre toda la esfera. Llevada al diagrama simplificado significa que, Figura 4.15: (a) Diagrama real de radiación de la antena y (b) diagrama simplificado. G0 0 + G(4 0) (4.57) =4 Aquí, G0 = 2 (4.58) 0 Pág.: 103 SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. CAPITULO 4. ALGUNAS APLICACIONES DE LA DEFINICION DE ANGULO SOLIDO El el valor de G para un reflector parabólico es aproximadamente G = 0; 5 de modo que para valores de G0 1 será 200. La expresión (4.59) es muy valiosa para conocer rápidamente la Gmax de una antena en función del ancho del haz (o viceversa). Figura 4.16: Un conmutador conecta alternativamente la antena y la resistencia R ruidosa (Nyquist). La resistencia está adaptada a la impedancia de entrada del amplificador. Cuando el conmutador está conectando la antena (ver figura 4.16), en el amplificador entra una potencia de señal Ps . Con el conmutador abajo, entra la potencia de ruido Pr desde la resistencia. Si se varía la temperatura de la resistencia para igualar la señal que viene de la antena se tendrá, (4.59) Pr = kTr y la potencia de señal desde el cielo, Z Z X X Ps = ISant d + f Sant = IGSi d + f GSi S (4.60) S El primer término incluye las fuentes extendidas caracterizadas por su intensidad de radiación I, y el segundo toma en cuenta las fuentes puntuales con su densidad de flujo f que las caracteriza. Entonces, Z X kTf G Ps = d + f GSi (4.61) S 4 donde Tf es la temperatura de brillo de las fuentes extendidas (0 K). Igualando ahora (4.59) con (4.61) resulta, Z X kTf G kTr = d + f GSi (4.62) S 4 A la temperatura Tr a la que se debe someter la resistencia para que su potencia iguale a la proveniente de la antena, se le llama Temperatura de Antena Tant de manera que, R TG P f Si G Tant = S 4f d + (4.63) k Pág.: 104 SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. CAPITULO 4. ALGUNAS APLICACIONES DE LA DEFINICION DE ANGULO SOLIDO observándose en esta expresión la importancia de la definición de ángulo sólido en su determinación. La evaluación del primer término correspondiente a fuentes distribuidas implica dos aspectos. Uno es el que tiene en cuenta la señal no deseada que, de todos modos, entra por la antena por los lóbulos laterales, como la proveniente del piso a 3000 K. El suelo abarca un angulo sólido de 2 sr y proporciona un valor elevado a la Tant . El otro aspecto tiene en cuenta la evaluación de la contribución a la Tant desde las radiofuentes extendidas. Figura 4.17: La Temperatura de Antena. Su respuesta a la potencia entregada a la antena por una fuente extendida a través de su lóbulo principal. La Tant será el indicador de toda la potencia que entra en la antena. En la figura 4.17, una fuente extendida entra su potencia en la antena por su lóbulo principal (cículos graduales). La Tant responderá a la integración de toda la superficie. 4.7 En Dispersión de Partículas Es posible estudiar, empleando la Mecánica Clásica, la dispersión de partículas mediante campos de fuerzas centrales [Ref. 62, 63]. Desde luego, si el tamaño de las partículas es del orden atómico, es de esperarse que los resultados específicos de un tratamiento clásico sean a menudo incorrectos desde un punto de vista físico, ya que en tales regiones suelen ser importantes los efectos cuánticos. En reacciones nucleares, sobre todo a altas energías y en el caso de iones pesados, las fórmulas clásicas, y en particular las aproximaciones semiclásicas, dan resultados similares a los cuánticos. En su formulación para un cuerpo, el problema de la dispersión se ocupa de la desviación de partículas por un centro de fuerzas atractivo o repulsivo. En la figura 4.18 se muestra la dispersión de una partícula de masa m que incide en el campo de Pág.: 105 SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. CAPITULO 4. ALGUNAS APLICACIONES DE LA DEFINICION DE ANGULO SOLIDO fuerza repulsivo originado por una partícula de masa M (M m). La partícula m se acerca desde el infinito, es dispersada por el campo de fuerza siguiendo una trayectoria hiperbólica y luego se aleja al infinito, de manera que M se encuentra en el foco de la misma. Al interaccionar con el centro de fuerza la partícula cambia la dirección de su Figura 4.18: Dispersión de una partícula de masa m por el campo de fuerza repulsivo originado por la masa M . velocidad ! v , siendo el ángulo entre la velocidad inicial ! v 0 y la velocidad ! v f final el denominado ángulo de dispersión, el cual será denotado mediante . Se denominará parámetro de impacto b a la distancia perpendicular entre la dirección de la velocidad inicial ! v 0 de la partícula incidente y la asíntota (a la trayectoria) adyacente. Los datos iniciales que se emplean generalmente en problemas de dispersión en campos centrales son b y la energía E. Considérese ahora un haz uniforme de partículas (da igual que sean electrones, protones o planetas) todas de igual masa y energíax que inciden sobre un centro de fuerza y supóngase que la fuerza disminuye tendiendo a cero para grandes distancias. Las diferentes partículas en el haz tienen distintos parámetros de impacto con respecto al centro de fuerza y, por lo tanto, son dispersadas con diferentes ángulos .Se define la intensidad del flujo I ver (figura 4.19), también llamada densidad de flujo, como el número de partículas N que atraviesan en cada unidad de tiempo t una unidad de superficie S colocada normalmente a la dirección del haz, I= N St (4.64) Obsérvese ahora la figura 4.20. Aquellas partículas del haz incidente que poseen el mismo parámetro de impacto b son dispersadas en un cono con vértice en 0 y semix Generalmente se emplea un haz de partículas idénticas en experimentos de dispersión. Pág.: 106 SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. CAPITULO 4. ALGUNAS APLICACIONES DE LA DEFINICION DE ANGULO SOLIDO Figura 4.19: Haz de partículas idénticas que incide sobre un blanco situado en 0. ángulo , puesto que el sistema posee simetría axial, el cual encierra un ángulo sólido . Al usar el resultado (3.40) el diferencial de ángulo sólido d viene dado por, (4.65) d = 2 Sen d ya que aquí es igual a la coordenada . Si n ( ) es el número partículas que son desviadas dentro del ángulo sólido por unidad de tiempo t, entonces se define la sección eficaz de dispersión ( ) como la fracción de partículas incidentes que son desviadas dentro del ángulo sólido , Figura 4.20: Dispersión de un haz de partículas incidentes por un centro de fuerzas 0. ( )= n( ) I (4.66) Pág.: 107 SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. CAPITULO 4. ALGUNAS APLICACIONES DE LA DEFINICION DE ANGULO SOLIDO notándose que ( ) tiene unidades de superficie. Por diferenciación, d ( )= (4.67) ( )d que representa la fracción de partículas dispersadas en un ángulo sólido d , es decir, representa la probabilidad de dispersión en un diferencial de ángulo sólido d . Ahora bien, por conservación del número de partículas por unidad de tiempo se tiene que, Número de partículas dispersadas Número de partículas incidentes entre b y b+db en un ángulo sólido d = t (4.68) t que puede ser escrito como, IdS1 = Id o, dS1 = d (4.69) dS1 = d (4.70) o también, donde se ha usado (4.67). Pero como, (4.71) dS1 = 2 bdb entonces, al sustituir este resultado y el (4.65) en (4.70) se obtiene que, 2 bdb = 2 Sen d de aquí que, = b Sen db d (4.72) que es la sección eficaz en función del ángulo de dispersión . El valor absoluto en la derivada es para garantizar que sea positiva, puesto que representa una probabilidad. Esta expresión también puede ser escrita como, d d = b Sen db d (4.73) mediante el uso de (4.67), que es encontrada muy frecuentemente en la literatura y es la denominada sección eficaz diferencial. El parámetro de impacto b se determina a partir de la ley de fuerza que gobierna el caso particular que se esté estudiando. Uno puede darse cuenta que el conocimiento de la sección eficaz diferencial permite determinar el potencial de interacción entre el proyectil y la partícula que sirve de blanco. Pág.: 108 SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. CAPITULO 4. ALGUNAS APLICACIONES DE LA DEFINICION DE ANGULO SOLIDO 4.8 En Detección de Radiación Se denomina Sistema Espectrométrico a aquél formado por una fuente de radiación y el detector que se utiliza para medir su actividad. Tanto las fuentes de radiación como los detectores empleados pueden ser de variados tamaños, aspectos y materiales, además de poder estar geométricamente dispuestos el uno respecto al otro en variedad de formas. Dada una fuente de radiación, siempre se intenta buscar el mejor detector para el tipo de radiación a estudiar y la mejor disposición geométrica de uno con respecto al otro para lograr la mayor detección de radiación posible, es decir, lograr la mayor eficiencia [Ref. 64, 65]. 4.8.1 Factores que afectan la eficiencia de un detector No todas las radiaciones que llegan a un detector producen un pulso. La eficiencia de un detector está dada por la relación entre el número de radiaciones que cuenta y el número que le llegó. Una eficiencia de 100% implica que todas las radiaciones que llegan son detectadas. En cambio una eficiencia de 1%, por ejemplo, significa que de cada 100 radiaciones que recibe, cuenta sólo una. Es importante conocer la eficiencia de cualquier detector (calibrarlo) para tomarla en cuenta al calcular la dosis recibida. Hay varias circunstancias que afectan la eficiencia de un detector. Una de ellas es el tipo y la energía de la radiación. Las eficiencias relativas de un detector para alfas, betas, gammas o neutrones son muy diferentes, debido a los diferentes mecanismos de interacción de cada uno de ellos con materia (ya sea el material del detector o de su envoltura). Considérese la eficiencia de un contador Geiger para radiación externa. Las partículas alfa no logran traspasar las paredes del recipiente, así que su eficiencia es cero. Las betas, en cambio, serán contadas en la medida en que puedan atravesar las paredes del recipiente; si éstas son delgadas podrá detectar la mayoría que le lleguen. Los rayos X y gamma en general pueden atravesar las paredes, pero la probabilidad de que ionicen el gas es pequeña por su baja densidad; sin embargo, esto no impide su uso en términos generales. Para detectar neutrones los contadores Geiger convencionales no sirven. La energía de las radiaciones incidentes es otro parámetro que afecta la eficiencia de un detector. Para empezar, la energía de partículas alfa o beta determina si éstas son capaces de cruzar la envoltura y ser contadas. En el caso de rayos X o gamma, el poder de ionización depende del coeficiente de absorción para cada uno de los tres efectos (fotoeléctrico, Compton o pares). Como ya se vio, éste depende de la energía Pág.: 109 SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. CAPITULO 4. ALGUNAS APLICACIONES DE LA DEFINICION DE ANGULO SOLIDO de los fotones, y en general es muy grande para bajas energías, así que es de esperarse que los contadores en general tengan mayor eficiencia con bajas energías de rayos X o gamma. El material del detector afecta su eficiencia, principalmente por su densidad. Los detectores sólidos son más eficientes que los gaseosos porque hay más materia que ionizar. Además, en los gaseosos la presión del gas determina la eficiencia. También el tamaño de un detector es determinante para su eficiencia, porque en un detector grande hay más materia que ionizar, además de que es más difícil que la radiación se escape. El efecto producido en el detector y la manera como éste se pone en evidencia son importantes para su eficiencia. El efecto puede ser ionización (como en los detectores gaseosos), producción de luz, excitación atómica o reacción química. Cualquiera que sea el efecto en un detector dado, éste se tiene que medir de alguna manera. Si es ionización, se puede medir con un circuito electrónico apropiado. Si es destello luminoso, se necesita una celda fotoeléctrica sensible. Si es reacción química, se identifica el nuevo compuesto, por ejemplo, por su cambio de color. Finalmente, el aparato asociado desempeña un papel importante, por ejemplo, el circuito electrónico y el indicador de corriente en los detectores gaseosos. El acoplamiento eléctrico del detector al circuito, el nivel de discriminación para eliminar ruido electrónico, los valores y la precisión de los voltajes empleados, la magnitud de amplificación de los pulsos, la sensibilidad del indicador de carátula, la precisión de las escalas del indicador, son factores que afectan la eficiencia de conteo. Además, es importante señalar que la eficiencia debe referirse a la combinación detector-circuitoindicador, y no sólo a una parte. Los monitores de radiación y los dosímetros dan lecturas en unidades de exposición, de dosis absorbida o de dosis equivalente. Los pulsos que produce el detector se tienen que transformar a estas unidades. Lo mismo puede decirse del ennegrecimiento de una película o del cambio de color de una solución. Siempre hay lugar a error en las lecturas debido a los procesos descritos. Los fabricantes generalmente calibran sus aparatos por comparación con fuentes de características conocidas (patrones), y recomiendan cómo se deben usar y cómo se pueden garantizar lecturas correctas. Además, algunas de sus características van cambiando con el tiempo, así que se deben verificar de cuando en cuando. Pág.: 110 SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. CAPITULO 4. ALGUNAS APLICACIONES DE LA DEFINICION DE ANGULO SOLIDO 4.8.2 Tipos de eficiencia Es posible calcular, para las distintas disposiciones geométricas fuente-detector, distintos tipos de eficiencia [Ref. 64]: 4.8.2.1 Eficiencia geométrica "G Para una fuente puntual, ésta es la fracción de la radiación total que incide sobre la cara del cristal del detector. En otras palabras, la eficiencia geométrica de una fuente puntual es la fracción del ángulo sólido total 4 que el cristal subtiende en la fuente. Matemáticamente, "G = 4 dependiendo sólo de la geometría fuente-detector. Véase como ejemplo la figura 4.21. Figura 4.21: Ejemplos de detectores y fuentes de radiación. 4.8.2.2 Eficiencia intrínseca insidente "i (E) Es la fracción de la radiación monocromática isótropa con energía fotónica E incidente sobre la cara del cristal del detector, que interactúa para producir centelleo mesurable. 4.8.2.3 Eficiencia intrínseca de la fuente " (E) Es la fracción de la radiación monocromática isótropa de una fuente con energía fotónica E que incide sobre la cara del cristal del detector, que interactúa para proPág.: 111 SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. CAPITULO 4. ALGUNAS APLICACIONES DE LA DEFINICION DE ANGULO SOLIDO ducir un centelleo mesurable. 4.8.2.4 Eficiencia de pico de energía completo para la fuente " (E) R (E) y eficiencia de pico de energía completo " (E) R (E) Los términos y " (E)fueron definidos antes. El término R(E) es la razón del área del pico completo de energía{ con respecto al área del espectro total de un rayo de fotones monocromático de energía E y es llamado frecuentemente la razón pico-total o la fotofracción. Como puede observarse de todo lo anterior, la eficiencia en los sistemas espectrométricos es fuertemente dependiente de la definición de ángulo . Por lo tanto en este tipo de estudios es fundamental su aplicación. Este tipo de problemas, la eficiencia en los sistemas expectrométricos, es de muy vieja data y sigue siendo un duro tema de investigación, aún en la actualidad. { Pico de energía completo: es la altura del pulso de distribución (usualmente Gaussiana) que resulta de la disipación de la enegía de rayo gamma total en el cristal. El pulso completo de energía existente puede consiguirse mediante una única interacción, o múltiples interacciones incidentes que involucran el efecto fotoeléctrico, efecto Compton y la producción de pares. Pág.: 112 SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. BIBLIOGRAFIA [1] Real Academia Española. http://www.rae.es/ Diccionario de la Lengua Española. Versión electrónica que permite acceder al contenido de la 22a. edición y las enmiendas incorporadas hasta 2012. Revisado el 15/03/2015. [2] Moya de la T. D., A. PRINCIPIOS DE GEOMETRIA. Imprenta de D. Alejandro Gómez Fuentenebro, 2da edition, 1864. pp. 67. [3] Alvarez C., E. ELEMENTOS DE GEOMETRIA, CON NUMEROSOS EJERCICIOS Y GEOMETRIA DEL COMPAS. Editorial Universidad de Medellín, 2003. pp. 368 - 370. [4] Izquierdo A., F. GEOMETRIA DESCRIPTIVA. Editorial Paraninfo, 24a edition, 1998. pp. 68 - 76. [5] Zuñiga P., M. L. POLIEDROS ARQUIMEDIANOS. Revista del Profesor de Matemáticas, (6):49 – 57, 1998. [6] Puig A., P. CURSO DE GEOMETRIA METRICA - FUNDAMENTOS, volume 1. Biblioteca Matemática S. L., Madrid - España, 11a edition, 1973. pp. 117 - 128. [7] Scala E., J. J. ANALISIS VECTORIAL - CAMPOS, volume II. Editorial Reverté, S.A., 1990. pp. 11 - 14. [8] Alonso, M. & Finn, E. J. FISICA - MECANICA, volume 1. Fondo Educativo Interamericano, S.A., 1970. pp. 21 - 23 51 - 53. [9] Barrero, M.; Casado, M.; Castejón, M. & Lorente, L. TRIGONOMETRIA ESFERICA FUNDAMENTOS. Impreso en E.T.S.I. en Topografía, Geodésia y Cartografía, Madrid, Septiembre 2008. 113 BIBLIOGRAFIA [10] Hull, G. W. ELEMENTS OF GEOMETRY. E. H. Butler & Co., Philadelphia, 1897. pp. 364. [11] Casey, J. A TREATISE ON SPHERICAL TRIGONOMETRY, AND ITS APPLICATION TO GEODESY AND ASTRONOMY, WITH NUMEROUS EXAMPLES. Hodges, Figgis & Co., Dublin, 2nd edition, 1889. pp. 24 - 26, 87. [12] Cortázar, J. TRATADO DE TRIGONOMETRIA RECTILINEA Y ESFERICA, Y DE TOPOGRAFIA, volume 10ma. Imprenta de A. Peñuelas, 1865. [13] Faget, J. & Mazzaschi, J. TEMAS PROGRAMADOS DE FISICA - GENERALIDADES, volume 1. Editorial Reverté, S.A., 1976. pp. 121 - 135. [14] Kaufman, A. A. GEOPHYSICAL FIELD THEORY AND METHOD - GRAVITATIONAL, ELECTRIC AND MAGNETIC FIELDS, volume A. Academic Press, INC., 1992. pp. 12 - 22. [15] Eyges, L. THE CLASSICAL ELECTROMAGNETIC FIELDS. Dover Publications, 1972. pp. 12 - 22. [16] Boreman, G. D. BASIC ELECTRO OPTICS FOR ELECTRICAL ENGINEERS. SPIE Optical Ingineering Press, 1998. pp. 32-33. [17] Marder, L. CAMPOS VECTORIALES - SELECCION DE PROBLEMAS RESUELTOS, volume 7. Editorial LIMUSA, 1974. pp. 38-39 63-65. [18] Van Oosterom, A. & Strackee, J. THE SOLID ANGLE OF A PLANE TRIANGLE. IEEE Transactions on Biomedical Engineering, BME-30(2):125 – 126, February 1983. [19] Friston, K. J.; Ashburner, J. T.; Kiebel, S. J.; Nichols, T. E. & Penny, W. D. STATISTICAL PARAMETRIC MAPPING: THE ANALYSIS OF FUNCTIONAL BRAIN IMAGES. Academic Press, INC., 2006. [20] Thonon, H. C. DINAMICA DISCRETA. Fundación Universitaria Andaluza Inca Garcilaso para eumed.net, Agosto 2013. pp. 18 - 23 31 - 35 http://www.eumed.net/libros-gratis/2013a/1335/1335.pdf. [21] Barnard, A. C. L.; Duck, I. M.; Lynn M. S. & Timlake W. P. THE APPLICATION OF ELECTROMAGNETIC THEORY TOELECTROCARDIOLOGY II. NUMERICAL SOLUTION OF THE INTEGRAL EQUATIONS. Biophysical Journal, 7:463 – 491, 1967. [22] Barr, R. C.; Ramsey, M. & Spach, M. S. RELATING EPICARDIAL TO BODY SURFACE POTENTIAL DISTRIBUTIONS BY MEANS OF TRANSFER COEFFICIENTS BASED ON GEOMETRY MEASUREMENTS. IEEE Transactions on Biomedical Engineering, BME-24(1):1 – 11, January 1977. Pág.: 114 SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. BIBLIOGRAFIA [23] Wischmann, H.-A.; Drenckhahn, R.; Wagner, M. & Fuchs, M. SYSTEMATIC DISTRIBUTION OF THE AUTO SOTID ANGLE AND RELATED INTEGRALS ONTO THE ADJACENT TRIANGLES FOR THE NODE BASED BOUNDARY ELEMENT METHOD. Medical & Biological Engineering & Computing, 4:245 – 246, 1996. [24] Schlitt, H. A.; Heller, L.; Aaron, R.; Best, E. & Ranken, D. M. EVALUATION OF BOUNDARY ELEMENT METHODS FOR THE EEG FORWARD PROBLEM: EFFECT OF LINEAR INTERPOLATION. IEEE Transactions on Biomedical Engineering, 41(1):52 – 58, January 1995. [25] Van Oosterom, A. TRIANGULATING THE HUMAN TORSO. The Computer Journal, 21(3):253 – 258, 1978. [26] Barr, R. C.; Pilkington, T. C.; Boineau, J. P. & Spach, M. S. DETERMINING SURFACE POTENTIALS FROM CURRENT DIPOLES, WITH APPLICATION TO ELECTROCARDIOGRAPHY. IEEE Transactions on Biomedical Engineering, BME- 13(2):88 – 92, April 1966. [27] De Munck, J. C. A LINEAR DISCRETIZATION OF THE VOLUME CONDUCTOR BOUNDARY INTEGRAL EQUATION USING ANALYTICALLY INTEGRATED ELEMENTS. IEEE Transactions on Biomedical Engineering, 39(9):986 – 990, September 1992. [28] Ferguson, A. S..; Zhang, X. & Stroink, G. A COMPLETE LINEAR DISCRETIZATION FOR CALCULATING THE MAGNETIC FIELD USING THE BOUNDARY ELEMENT METHOD. IEEE Transactions on Biomedical Engineering, 41(5):455 – 460, May 1994. [29] He, B.; Wang, Y. & Wu, D. ESTIMATING CORTICAL POTENTIALS FROM SCALP EEGŠS IN A REALISTICALLY SHAPED INHOMOGENEOUS HEAD MODEL BY MEANS OF THE BOUNDARY ELEMENT METHOD. IEEE Transactions on Biomedical Engineering, 46(10):1264 – 1268, October 1999. [30] Berne, E. THE CALCULATION OF THE GEOMETRICAL EFFICIENCY OF ENDWINDOW GEIGER-MÜLLER TUBES. Review of Scientific Instruments, 22(7):pp. 509 – 512, July 1951. [31] Garrett, M. W. SOLID ANGLE SUBTENDED BY A CIRCULAR APERTURE. Review of Scientific Instruments, 25(12):pp. 1208 – 1211, December 1954. [32] Jaffy, H. SOLID ANGLE SUBTENDED BY A CIRCULAR APERTURE AT POINT AND SPREAD SOURCES: FORMULAS AND SOME TABLES. Review of Scientific Instruments, 25(4):pp. 349 – 354, 1954. [33] Smith, J. H. & Storm, M. L. GENERALIZED OFF-AXIS DISTRIBUTIONS FROM DISK SOURCES OF RADIATION. Journal of Applied Physics, 25(4):pp. 519 – 527, April 1954. Pág.: 115 SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. BIBLIOGRAFIA [34] Naito, M. A METHOD OF CALCULATING THE SOLID ANGLE SUBTENDED BY A CIRCULAR APERTURE. Journal of the Physical Society of Japan, 12(10):pp. 1122 – 1129, October 1957. [35] Paxton, F. SOLID ANGLE CALCULATION FOR A CIRCULAR DISK. The Review of Scientific Instruments, 30(4):pp. 254 – 258, April 1959. [36] Masket, A. V. SOLID ANGLE SUBTENDED BY A CIRCULAR DISKSOLID ANGLE SUBTENDED BY A CIRCULAR DISK - LETTERS TO THE EDITOR. Review of Scientific Instruments, 30(10):pp. 950, October 1959. [37] Rowlands, G. SOLID ANGLE CALCULATIONS. The International Journal of Applied Radiation and Isotopes, 10(2 - 3):pp. 86 – 93, 1961. [38] Rothe, R. E. THE SOLID ANGLE AT A POINT SUBTENDED BY A CIRCLE. Journal of the Franklin Institute, 287(6):pp. 515 – 521, June 1969. [39] Gardner, R. P. & Verghesse, K. ON THE SOLID ANGLE SUBTENDED BY A CIRCULAR DISC. Nuclear Instruments and Methods, 93:pp. 163 – 167, 1971. [40] Jones, I. S. THE SOLID ANGLE SUBTENDED BY A CIRCULAR DISC WITH APPLICATION TO ROADSIGNS. International Journal of Mathematical Education in Science and Technology, 27(5):pp. 667 – 674, 1996. [41] Weisstein, E. W. SOLID ANGLE. MathWorldA Wolfram Web Resource. http://mathworld.wolfram.com/SolidAngle.html. [42] Prudnikov, A. P.; Brychkov, Y. A. & Marichev, O. I. INTEGRALS AND SERIES: ELEMENTARY FUNCTIONS, volume 1. Taylor & Francis, 1998. pp. 41, 92, 94. [43] Gossman,M. S.; Jussi Pahikkala, A.; Rising, M. B. & McGinley, P. H. PROVIDING SOLID ANGLE FORMALISM FOR SKYSHINE CALCULATIONS. Journal of Applied Clinical Medical Physics, 11(4):278 – 282, 2010. [44] Khadjavi, A. CALCULATION OF SOLID ANGLE SUBTENDED BY RECTANGULAR APERTURES. Journal of the Optical Society of America, 58(10):1417 – 1418, 1968. [45] Mathar, R. J. SOLID ANGLE OF A RECTANGULAR PLATE. MaxPlanck Institute of Astronomy, May 2015. pp. 1 - 9 Online paper http://www.mpia.de/ mathar/public/mathar20051002.pdf. [46] Abramowitz, M. & Stegun, I. A. HANDBOOK OF MATHEMATICAL FUNCTIONS. Dover Publications, New York, 10th edition, 1972. pp. 73, 80. Pág.: 116 SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. BIBLIOGRAFIA [47] Crawford, F. S. SOLID ANGLE SUBTENDED BY A FINITE RECTANGULAR COUNTER. Review of Scientific Instruments, 24:552 – 553, 1953. [48] Holland, R. P. & Arnsdorf, M. F. SOLID ANGLE THEORY AND THE ELECTROCARDIOGRAM: PHYSIOLOGIC AND QUANTITATIVE INTERPRETATIONS. Progress in Cardiovascular Diseases, 19(6):431 – 457, June 1977. [49] Okin, P. M. & Kligfield, P. SOLID ANGLE THEORY AND HEART RATE ADJUSTMENT OF ST-SEGMENT DEPRESSION FOR THE IDENTIFICATION AND QUANTIFICATION OF CORONARY ARTERY DISEASE. American Heart Journal, 127(3):658 – 667, March 1994. [50] Cárdenas, M. INFARTO POSTERIOR (DORSAL) E INFARTO DEL VENTRICULO DERECHO. Archivos de Cardiología de México, 74(1):38 – 43, Enero-Marzo 2004. [51] Portillo M., M. ELECTROCARDIOGRAFIA: TECNICA DE INTERPRETACION BASICA. VI Foro de Pediatria de Atencion Primaria de Extremadura, pp 57 - 73, Abril 2009. [52] Uribe A., W.; Duque R., M. & Medina D., E. ELECTROCARDIOGRAFIA Y ARRITMIAS. P.L.A. Export editores Ltda., Bogotá D.C. Colombia, 2005. [53] Hayt, W. H. Jr. & Buck, J. A. TEORIA ELECTROMAGNETICA. McGRAW-HILL Interamericana, México, 7ma edition, 2006. pp. 210 - 218. [54] Griffiths, D. J. INTRODUCTION TO ELECTRODYNAMICS. Prentice Hall, Inc., Upper Saddle River, New Jersey, 1981. pp. 215 - 220. [55] Paul, C. R.; Whites, K. W. & Nasar, S. A. INTRODUCTION TO ELECTROMAGNETIC FIELDS. WCB/McGraw-Hill, 3rd edition, 1998. pp. 110 - 117 200 - 201. [56] Singh, S. ELECTROMAGNETICS. Discovery Publishing House PVT. LTD., 1st edition, 2009. pp. 169 - 174. [57] Alonso, M. & Finn, E. J. FISICA - CAMPOS Y ONDAS, volume 2. Addison-Wesley Iberoamericana, Wilmintong, Delaware, E.U.A., 1987. pp. 579 - 587. [58] Plonsey, R. & Collin, R. E. PRINCIPLES AND APPLICATIONS OF ELECTROMAGNETIC FIELDS. McGRAW-HILL Book Company, INC., 1961. pp. 47 - 50. [59] Jackson, J. D. CLASSICAL ELECTRODYNAMICS. John Wiley & Sons, Inc., 3rd edition, pp. 27-29. pp. 27 - 29. [60] Arya, A. P. INTRODUCTION TO CLASICAL MECHANICS. Addison-Wesley Professional, 2nd edition, August 1997. pp. 414 - 419. Pág.: 117 SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016. BIBLIOGRAFIA [61] Thornton, S. T. & Marion, J. B. CLASICAL DYNAMICS OF PARTICLES AND SYSTEMS. Thomson Brooks/Cole, 5th edition, 2004. pp. 192 - 194. [62] Cosenza, M. MECANICA CLASICA. Universidad de los Andes (ULA). Facultad de Ciencias. Departamento de Física. Mérida - Venezuela (Publicación Electrónica), 2015. Notas de clases, versión A-2015. pp. 133-141 http://www.ciens.ula.ve/cff/caoticos/PDFs/guiaMecanicaClasica.pdf. [63] Greiner,W. CLASSICAL MECHANICS. SYSTEMS OF PARTICLES AND HAMILTONIAN DYNAMICS. Springer-Verlag New York, Inc., 2003. pp. 51 - 55. [64] Crouthamel, C. E. APPLIED GAMMA-RAY SPECTROMETRY. Pergamon Press, 2nd edition, 1970. pp. 201 - 221. [65] Knoll, G. F. RADIATION DETECTION AND MEASUREMENT. John Wiley & Sons, Inc., 3rd edition, 2000. pp. 1 - 27, 103 - 127. Pág.: 118 SOLDOVIERI C., Terenzio & VILORIA A., Tony. El ANGULO SOLIDO Y ALGUNAS DE SUS APLICACIONES. 1era ed. preprint. República Bolivariana de Venezuela, 2016.



![Evaluación%20Grado%20Decimo%20noveno%20y%20undecimo[1].](http://s2.studylib.es/store/data/000860011_1-723727629aa8ab5007657ff23e4e4a09-300x300.png)