El Datum en Navegación - Tesis Electrónicas UACh
Anuncio

Escuela de Ingeniería Naval
“EL DATUM EN NAVEGACIÓN”
Tesis para optar al Título de
Ingeniero Naval
Mención: Transporte Marítimo
Profesor Patrocinante:
Sr. Roberto Casanova Esparza.
Oficial de la Marina Mercante Nacional.
PABLO ANDRÉS MEZA ROJAS
VALDIVIA - CHILE
2011
Esta Tesis ha sido sometida para su aprobación a la Comisión de Tesis, como
requisito para obtener el grado de Licenciado en Ciencias de la Ingeniería.
La Tesis aprobada, junto con la nota de examen correspondiente, le permite al
alumno obtener el Título de Ingeniero Naval, Mención Transporte Marítimo.
EXAMEN DE TITULO
Nota de Presentación
(Ponderado) (1)
: ………..………….…
Nota de Examen
(Ponderado) (2)
: ………………….…..
Nota Final de Titulación
(1+2)
: ……………….…......
COMISIÓN EXAMINADORA
……………………………………....
DECANO
……………………………...
FIRMA
……………………………………....
EXAMINADOR
……………………………...
FIRMA
……………………………………....
EXAMINADOR
……………………………...
FIRMA
……………………………………....
EXAMINADOR
……………………………...
FIRMA
……………………………………....
SECRETARIO ACADÉMICO
……………………………...
FIRMA
Valdivia, …………………………………………………………
Nota de Presentación
Nota Final
= NC/NA x 0,6 + Nota de Tesis x 0,2.
= Nota de Presentación + Nota Examen x 0,2.
NC
= Sumatoria Notas de Curriculum, sin Tesis.
NA
= Número de Asignaturas Cursadas y Aprobadas,
Incluida Práctica Profesional.
Agradecimientos
Le agradezco a mi Madre, Hilda Inés Rojas Cofré, y a mi Padre, Francisco
Solano Meza Leal, por sus esfuerzos, sacrificios y apoyo incondicional que me han
dado siempre, y que me siguen dando.
Les agradezco a todos aquellos profesores por sus enseñanzas, consejos y
motivación que me entregaron durante todos estos años.
Especial mención para el profesor Roberto Casanova Esparza, por la motivación
y dedicación que imparte día a día hacia sus estudiantes, y por mostrarme este
hermoso mundo, que es la navegación.
Índice
Resumen
Summary
Introducción
Pág.
Capítulo I: La Geodesia
1
1.1 La Geodesia
1
1.2 Historia de la Geodesia
1
1.2.1 Grecia
2
1.2.2 Edad Media
4
1.2.3 Siglos XV y XVI
5
1.2.4 Siglos XVII y XVIII
7
1.2.5 Siglos XIX y XX
8
11
1.2.6 Siglo XXI
12
1.3 Divisiones de la Geodesia
1.3.1 Astronomía Geodésica
12
1.3.2 Geodesia Geométrica
12
1.3.3 Geodesia Dinámica
13
1.3.4 Geodesia Física
14
1.3.5 Geodesia Tridimensional
14
1.3.6 Geodesia Espacial
14
Capítulo II: El Datum
15
2.1 El Geoide Terrestre
15
2.2 El Elipsoide Terrestre
16
2.3 Relaciones entre el Geoide y el Elipsoide
19
2.3.1 Angulo Radial de la Vertical
20
2.3.2 Desviación de la Vertical
20
2.3.3 Desviación Sobre el Meridiano
21
2.3.4 Ondulación Geoidal
22
2.4 Sistemas de Coordenadas Terrestres
23
2.4.1 Coordenadas Astronómicas
23
2.4.2 Coordenadas Geodésicas
24
2.4.3 Coordenadas Geocéntricas
25
2.4.4 Coordenadas Rectangulares Geocéntricas
26
2.4.5 Coordenadas Rectangulares Planas
28
2.5 El Datum
30
2.5.1 Tipos de Datum
31
2.5.2 Universo de Elipsoides y Datum Utilizados en Geodesia
32
2.5.3 El Datum Según su Área de Aplicación
32
2.5.4 Diferencias en el uso de Distintos Datums
32
Capítulo III: El Elipsoide como Superficie de Referencia
35
3.1 La Esfera y el Elipsoide
35
3.2 Aplicaciones del Elipsoide
39
3.2.1 Distancias en Latitud
39
3.2.2 Apartamiento
44
3.2.3 Paralaje de Altura (Luna)
47
3.2.4 Otros Casos
53
Capítulo IV: Sistema Geodésico Mundial de 1984 (WGS 84)
60
4.1 Sistema de Coordenadas WGS 84
60
4.2 Elipsoide WGS 84
62
4.2.1 Semieje Mayor (a)
63
4.2.2 Achatamiento (f)
64
4.2.3 Velocidad Angular de la Tierra (ω)
65
4.2.4 Constante Gravitacional de la Tierra (GM)
66
4.2.5 Constantes Geométricas y Físicas
67
4.3 Gravedad Elipsoidal en el WGS 84
70
4.4 Geoide EGM96 y el WGS 84
70
4.5 El WGS 84 Relacionado con otros Sistemas Geodésicos
73
4.5.1 Relación del WGS 84 con los ITRF
73
4.5.2 Relación del WGS 84 con el NAD 83
74
4.5.3 Transformaciones de un Datum Geodésico Local al WGS 84
75
Conclusiones
77
Anexos
79
Anexo A: Proyecciones Cartográficas
79
Anexo B: Universo Actual de Elipsoides y Datums Utilizados en Geodesia
87
Anexo C: Datums Utilizados en Sudamérica
90
Anexo D: Análisis Matemático al Elipsoide
94
Bibliografía y Páginas Web
103
Resumen
Esta Tesis esta orientada en mostrar al datum en su totalidad, dentro de esto, las
aplicaciones como superficie de referencia, las diferencias propias de esta superficie
con las demás superficies que se utilizan para la Tierra, entre otras, así como también
mostrar al datum WGS 84.
En cuanto a las aplicaciones como superficie de referencia, se verán que existen
unas pequeñas diferencias al hacer una comparación del punto de vista de una Tierra
esférica, con el de una Tierra elipsoidal, así como las correcciones.
En cuanto a los análisis, estos se mostrarán con resoluciones matemáticas,
apoyadas con gráficos para una mejor comprensión por parte del lector.
También se mostrará en detalle al datum WGS 84 con las distintas
consideraciones y alcances de este datum.
Este sistema de referencia actualmente es el más usado a nivel mundial, esto se
debe a que la gran mayoría de los receptores satelitales (GPS) utilizan a este datum
como referencia para la determinación de posiciones sobre la superficie de la Tierra, lo
mismo para la mayoría de las cartas náuticas, que también son referenciadas a este
datum.
Summary
This Thesis this oriented one in showing to the datum in their entirety, inside this,
the applications like reference surface, the differences characteristic of this surface with
the other surfaces that are used for the Earth, among other, as well as to show to the
datum WGS 84.
As for the applications like reference surface, they will be seen that some small
differences exist when making a comparison of the point of view of a spherical Earth,
with that of an ellipsoidal Earth, as well as the corrections.
As for the analyses, these they will be shown with mathematical resolutions,
leaning with graphics for a better understanding on the part of the reader.
It will also be shown in detail to the datum WGS 84 with the different
considerations and reaches of this datum.
This reference system at the moment is the most used at world level, this is due
to that the great majority of the satellite receiving (GPS) they use to this datum like
reference for the determination of positions on the surface of the Earth, the same thing
for most of the nautical charts that are also indexed to this datum.
Introducción
La forma de la Tierra es desde tiempos antiguos un motivo de discusión, grandes
personajes de la historia han dado su parecer, ya sea directa o indirectamente, no hay
más que leer los poemas de Homero (900 a.C.). En sus poemas heroicos resume todos
los conocimientos cosmográficos y geográficos de la época y del pueblo heleno, en
gran desarrollo, con una gran imaginación. Supone la Tierra plana y limitada en todos
sus sentidos.
Eratóstenes de Cyrene (276-195 a.C.), bibliotecario de la biblioteca de
Alejandría, fue el primero en determinar 240 años a.C. el radio terrestre, obteniendo un
valor bastante cerca de los actuales valores que definen a la Tierra.
Hoy en día con los avances tecnológicos, se ha determinado una forma para la
Tierra con innumerables irregularidades, que, auque son muy pequeñas, no permiten
utilizar una figura geométrica para representar enteramente a la Tierra, sin que esto
acarree diferencias en latitud y en longitud.
Sin embargo a esto, los levantamientos cartográficos y los receptores satelitales
utilizan como referencia a un elipsoide de revolución.
Es por esto que uno de los objetivos de esta Tesis es mostrar estas diferencias y
los alcances de estas diferencias en navegación, por muy pequeñas que sean, así
como las correcciones.
Otro de los objetivos es mostrar al sistema geodésico mundial de 1984
(WGS 84), que es el sistema más utilizado actualmente a nivel mundial, con las
distintas consideraciones y alcances de este datum.
Por ultimo, esta Tesis esta orientada a todo tipo de lectores, ya que los análisis
están en detalle, para su fácil comprensión, y especialmente a los estudiantes de la
mención de transporte marítimo, que pueden tomar este material como apoyo para su
aprendizaje.
1
Capítulo I
La Geodesia
1.1 La Geodesia
La palabra geodesia literalmente expresa división de la Tierra, sin embargo,
diversos autores notables establecen distintas definiciones de este concepto. Para unos
existe una clara diferencia entre la Geodesia Teórica y la Geodesia Práctica, indicando
que la primera estudia la forma y dimensiones de la Tierra, en cambio la segunda
establece los procedimientos para la medida de porciones terrestres. Para otros autores
esta diferencia no es tan clara, por ello se refieren a la geodesia como una ciencia cuyo
objetivo es el de proporcionar un armazón o estructura geométrica precisa para el
apoyo de los levantamientos topográficos.
Actualmente la geodesia se define brevemente como la ciencia que resuelve los
problemas relacionados con la figura y dimensiones de la Tierra, y como veremos más
adelante esta ciencia puede dividirse en varias disciplinas, atendiendo al método
seguido para llevar a cabo este objetivo.
Podemos decir que la geodesia es una ciencia, que desde la antigüedad, se ha
dedicado al estudio de la medida y forma del globo terráqueo, adaptándose a las
necesidades de la época para aplicarse a problemas prácticos, como son básicamente
la confección de mapas nacionales e internacionales, así como la preparación de cartas
para aplicaciones específicas como las geológicas e hidrográficas, entre otras.
Pudiendo afirmar que la geodesia se ha necesitado y seguirá siendo necesaria mientras
se proyecten obras humanas que requieran precisiones cada vez mayores.
Es importante hacer un recorrido por la historia de la geodesia para entender su
evolución y poder conocerla en profundidad.
1.2 Historia de la Geodesia
A continuación solo se reseñarán las contribuciones históricas de la geodesia
que tienen una relación más directa con lo tratado en esta Tesis.
2
1.2.1 Grecia
Las primeras referencias griegas sobre la forma de la Tierra son más poéticas
que científicas, no hay más que leer los poemas de Homero (900 a.C.). En sus poemas
heroicos resume todos los conocimientos cosmográficos y geográficos de la época y del
pueblo heleno, en gran desarrollo, con una gran imaginación. Supone la Tierra plana y
limitada en todos sus sentidos.
Anaximandro de Mileto (610-547 a.C.), discípulo de Tales de Mileto, dice que
es un cilindro que ocupa el centro de todo lo creado, pero construye la primera carta
geográfica conocida.
Los filósofos griegos afirmaban que la Tierra era esférica 500 años a.C. y se
apoyaban en que la forma geométrica más perfecta era la esfera. Parménides (515440 a.C.) y Empedocles (470 a.C.) emitieron por primera vez la idea de la esfericidad
de la Tierra y su aislamiento en el espacio.
Pitágoras de Samos (569-470 a.C.) llegó a decir que la Tierra no podía tener
otra forma y que además estaba aislada en el espacio e inmóvil. Filolao (450 a.C.), de
la escuela pitagórica, opina que la Tierra gira alrededor de si misma produciendo los
días y las noches y se desplaza, como el Sol, la Luna, los planetas y a mayor distancia
el cielo con las estrellas fijas, alrededor del fuego central, alma del mundo.
Hicetas, Heráclides (388-315 a.C.) y Efanto atribuían a la Tierra un movimiento
de rotación y pensaban que por lo menos la Tierra, Mercurio y Venus se movían
alrededor del Sol.
Platón (429-338 a.C.), que admite que la Tierra es redonda, la supone aislada e
inmóvil. Eudoxio de Gnido (409-356 a.C.), discípulo de Platón, da la teoría de las
esferas de cristal para explicar el movimiento de los planetas y estrellas (supone
veintiséis) con ejes en distintas direcciones y movimientos diversos, Calipo llega a
treinta y tres esferas y Aristóteles (384-322 a.C.), a cincuenta y cinco.
El geógrafo Dicearco (350-285 a.C.) supone la Tierra esférica y refiere sus
medidas al meridiano y al paralelo de Rodas, introduciendo así las coordenadas
esféricas. El geómetra Euclides enuncia las leyes del movimiento diurno y hace
observar que entre las osas hay una estrella que no se mueve (la estrella polar).
Arquímedes (287-212 a.C.) da un gran impulso a las matemáticas y evalúa la
circunferencia terrestre. En contra de las teorías aristotélicas aparecen las
revolucionarias de Aristarco de Samos (310-230 a.C.) que eliminó todas las esferas y
estableció el sistema heliocéntrico, la oposición de Aristóteles y Cleantes (331-232
a.C.) silenciaron estas teorías hasta los tiempos de Copérnico. Admitiendo la
esfericidad de la Tierra.
3
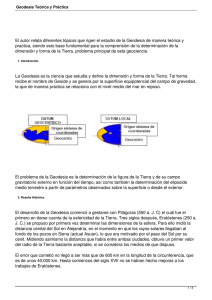
Eratóstenes de Cyrene (276-195 a.C.), bibliotecario de la biblioteca de
Alejandría fundada por el rey de Egipto Ptolomeo Soter, fue el primero en determinar
240 años a.C. el radio terrestre. Midió la longitud del meridiano entre Siena (actual
Asuán) y Alejandría, obteniendo un valor de unos 39.000 kilómetros para la longitud de
la circunferencia terrestre (unos 6.207 Km. de radio). Eratóstenes se dio cuenta de que
en el solsticio de verano, el Sol iluminaba en Siena los pozos hasta el fondo, por lo que
en ese momento se encontraba en el zenit en su culminación. En ese mismo instante
midió la altura del Sol en Alejandría, que suponía estaba en el mismo meridiano que
Siena. La distancia zenital determinada no era otra cosa que el ángulo que en el centro
de la Tierra esférica tenía el arco de meridiano Siena-Alejandría, figura 1.a.
También conocía Eratóstenes la distancia entre ambas ciudades, así tenía todos
los datos para determinar el radio de la Tierra. Las hipótesis y medidas de Eratóstenes
no eran exactas, por ejemplo entre Siena y Alejandría hay una diferencia de longitudes
cerca de 3º, pero sí su método, conocido como método de los arcos, fue utilizado
durante muchos siglos.
PN
7º 12´
Ra
yo
el
sd
Ra
yos
Sol
S
del
ol
Alejandría
Trópico de Cáncer
Siena (Asuán)
7º 12´
c
QT
Figura 1.a.
Arco de meridiano Siena-Alejandría.
Este método de los arcos fue aplicado por Posidonio (135-51 a.C.), que midió el
arco entre Rodas y Alejandría, sustituyendo el Sol por la estrella Canopus, pero obtuvo
un valor de unos 29.000 kilómetros para la circunferencia (unos 4.615 Km. de radio).
El gran astrónomo de esta época fue Hiparco de Nicea (190-120 a.C.) que
pensaba que la Tierra es esférica y que está inmóvil en el centro del mundo, inventa la
trigonometría, descubre la precesión de los equinoccios, conoce el valor de la
4
inclinación de la eclíptica y determina la duración del año trópico, entre otros trabajos
astronómicos.
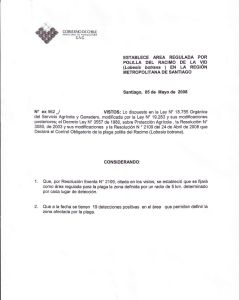
El mayor geógrafo y astrónomo de este tiempo fue Claudio Tolomeo (100-170
d.C.), que admitió el valor del radio terrestre de Posidonio y además lo trasmitió a su
posteridad. Autor de los trece volúmenes del Almagesto. Ideó el sistema planetario
geocéntrico basado en sus observaciones desde el templo de Serapis. Construyó un
mapa del mundo y las posiciones terrestres las representaba por la latitud y longitud, la
autoridad de Tolomeo traspasó su época. En la figura 1.b puede verse el mapa del
mundo atribuido a Tolomeo.
Figura 1.b.
Mapa del mundo atribuido a Tolomeo.
1.2.2 Edad Media
Las ideas aristotélicas impregnaron la edad media en Europa, se admitía la
esfericidad de la Tierra, pero se explicaba muy mal. Se suponía la Tierra cubierta de
agua excepto la parte habitada (ecúmene), en las Antípodas era imposible vivir “boca
abajo”. La historia de esos siglos está impregnada por los avances y descubrimientos
de matemáticos y astrónomos que consideran los problemas geodésicos en sus
trabajos, un resumen de los conocimientos matemáticos es realizado por el geómetra
Papus (400).
Es de destacar la medida del arco de meridiano realizada por el monje budista
chino I Hsing en el año 727. Las aportaciones árabes a la geodesia son muy reducidas,
aunque merecen destacarse las expediciones organizadas en las llanuras de Palmira y
Zinjar, cerca de Bagdad y Al Raqqah por el califa Al-Mamún (786-833), hijo del Haroun
al-Raschid, (830) para determinar la longitud del grado.
5
Las primitivas enseñanzas griegas, de maestros de la categoría de Pitágoras,
Eudoxio, Aristóteles, Eratóstenes, Hiparco y Tolomeo, entre otros, sobrevivieron gracias
a la civilización árabe, y en el siglo XII, a través de España, llegaron a Europa en las
traducciones al latín hechas en el reinado de Alfonso X de Castilla.
Un caso digno de mención es el de Roger Bacon (1214-1294), creador de la
óptica, estudia la refracción, gran problema de las observaciones, trata la astronomía y
la geografía y considera las mareas terrestres como el resultado de la atracción lunar.
1.2.3 Siglos XV y XVI
Pasado este tiempo, surge la época de las grandes exploraciones. En primer
lugar fue, posiblemente, el viaje de Marco Polo (1254-1324) de 1271 a 1295 el que
sirvió a Toscanelli (1397-1482) para la confección de un mapa (figura 1.c) que quizá
influyó en la decisión de Cristóbal Colón (1492) de cruzar el Atlántico navegando hacia
el oeste.
Figura 1.c.
Mapa de Toscanelli.
Pero Toscanelli, cometió un gran error pues tomaba como radio de la Tierra el
determinado por Posidonio y trasmitido por Tolomeo y como en sus mapas se apoyó
Colón no es de extrañar que éste creyera que el Cipango y el Catay estaban más cerca
(1.025 leguas) de lo que realmente resultó (3.150).
Después de Colón, Vasco de Gama (1469-1524) llega al sur de África y
Magallanes (1480-1521) y Elcano (1519-1522) dan la vuelta al mundo. Las
necesidades de navegación, principalmente, hicieron que se organizasen verdaderas
escuelas de cartógrafos, quienes con los conocimientos, muchas veces imprecisos,
aportados por la geodesia confeccionaron gran cantidad de mapas, algunos de los
cuales adquieren gran renombre, como los del italiano Américo Vespucio (1415-1512)
6
quien obtuvo los primeros mapas de la costa oeste de América del norte y dio nombre al
continente. Sin embargo el cartógrafo por excelencia de esta época, cuyos mapas
satisfacían las necesidades de la navegación, fue el flamenco Gerhard Kaufmann
(1512-1594) más conocido por Mercator. En la figura 1.d puede verse el mapa del
mundo de Mercator.
Figura 1.d.
Mapa del mundo de Mercator.
El gran astrónomo de esta época es Nicolás Copérnico (1473-1543) quien en
su obra "De Revolutionibus Orbium Coelestium" de 1543 da la teoría heliocéntrica del
sistema solar, que vino a revolucionar el pensamiento de la época anclado en las ideas
aristotélicas, se entablaron duras polémicas y se logró indirectamente que la atención
de los astrónomos y geodestas se dirigiese por este camino. Proliferaron las
observaciones, se construyeron observatorios y en general la astronomía tuvo el apoyo
de gobiernos y particulares que de otra manera difícilmente se hubiese logrado.
Naturalmente, la geodesia y la navegación se beneficiaron enormemente de los
resultados que se estaban obteniendo, pues pronto dispusieron de un mejor
conocimiento de las posiciones de los cuerpos celestes indispensables para sus fines
de posicionamiento y orientación. La teoría heliocéntrica pronto fue admitida por el
mundo científico, la razón se imponía a la teología, aunque no sin grandes sacrificios, el
italiano Giordano Bruno (1548-1600) fue ejecutado por hereje al admitir las ideas
copernicanas y Galileo fue obligado a retractarse de las mismas en uno de los procesos
más famosos de la historia, la inquisición.
El gran observador de esta época es Ticho Brahe (1546-1601) cuyas
observaciones del planeta Marte permitieron a Kepler (1571-1630) enunciar sus dos
primeras leyes sobre el movimiento de los planetas.
7
Un invento matemático viene a ayudar de forma definitiva la realización de
cálculos geodésicos y astronómicos. Se trata de los logaritmos inventados por Neper
(1550-1617) en 1595, estos no eran ni decimales ni neperianos. Las tablas de
logaritmos decimales fueron publicadas por Briggs en 1624 y los logaritmos neperianos
fueron introducidos por Euler en 1748.
1.2.4 Siglos XVII y XVIII
Las investigaciones y los trabajos geodésicos continúan, pero con unas bases
mucho más científicas que antes. Stevin (1548-1620) intuye la gravedad. Galileo
Galilei (1564-1642) aplica el anteojo a las observaciones astronómicas y enuncia las
primeras leyes de la mecánica con los importantes conceptos de velocidad y
aceleración.
En 1615 el holandés Snellius (1580-1626) realizó la primera triangulación
precisa y estudió la refracción; midió un arco entre Bergen op Zoom y Alkmaar con una
base cerca de Leyden. Este método, cuyos principios fueron dados por Gemma Frisius
en 1533, perduró hasta el siglo XX con las mejoras aportadas por los instrumentos de
observación y medios de cálculo. También se efectúan mediciones en Inglaterra por
Norwood (1590-1675) que en 1633 mide el arco entre Londres y York y en Italia por los
jesuitas Riccioli (1598-1671) y Grimaldi usando por primera vez ángulos zenitales
recíprocos en 1645, aunque tuvieron problemas con la refracción atmosférica.
En 1670 en Francia, el abad Picard (1620-1683) mejora los procedimientos de
observación al aplicar a los instrumentos goniométricos un anteojo provisto de retículo
formado por dos hilos en cruz. Midiendo por triangulación el arco de París entre
Malvoisine (al sur de París) y Sourdon (al sur de Amiens) determinó el radio terrestre y
su resultado (6.275 Km. de radio), fue de trascendental importancia pues sirvió a
Newton (1642-1727) para calcular la distancia a la Luna, que venía dada en unidades
del radio terrestre, y comprobar su ley de gravitación universal formulada en 1666 y
publicada en 1687. Newton suponía que la fuerza de atracción que mantiene la Luna en
su órbita alrededor de la Tierra es la misma que la fuerza que actúa sobre los cuerpos
de la superficie terrestre, entonces solo tenía que comparar la fuerza de atracción con la
gravedad obtenida por Galileo. Los precursores de la ley de Newton parecen ser el
italiano Borelli (1608-1679) y los ingleses Horrox (1619-1641) y Robert Hooke (16351703) que dedicó gran parte de su obra al estudio de la gravedad. También disponía
Newton de la matemática necesaria, puesta a punto por él mismo, por Descartes y por
Leibnitz (1646-1716) principalmente.
8
La aplicación de la ley de Newton a la teoría de figuras de equilibrio permitió
concluir que la Tierra no era una esfera sino que debía ser un elipsoide de revolución
achatado por los polos del eje de rotación. En 1672 Richer había observado que el
péndulo astronómico es más lento en Cayena que en París y Huygens (1629-1695), el
gran experto en relojes, que utilizó el primer reloj de péndulo preciso, interpretó estas
variaciones diciendo que la gravedad aumenta del ecuador a los polos porque la Tierra
es achatada. Esto se verifica para el elipsoide de Newton.
El siglo XVIII está dedicado en primer lugar a la medida de la longitud del grado
para determinar el achatamiento de la Tierra y en segundo lugar al desarrollo teórico de
la geodesia dinámica, Por aquel entonces Bradley (1693-1762) descubre la nutación.
El desarrollo de la matemática complementa perfectamente el desarrollo
geodésico. Euler (1707-1783), a quien se deben las primeras teorías sobre el
movimiento de cuerpos rígidos, en particular las ecuaciones de la rotación, junto con
Monge (1746-1816) y Meusnier (1754-1793) definen los elementos fundamentales de
las curvaturas de superficies y las propiedades de las líneas trazadas sobre ellas
llegando a teoremas clásicos de la teoría de superficies de aplicación geodésica.
Trabajos también importantes son los emprendidos por Lagrange (1736-1813)
quien en 1788 publica la primera edición de su “Méchanique Analitique”, y obtiene las
ecuaciones del movimiento del polo. En 1785 Legendre (1752-1833) introduce la
noción de potencial y funda la teoría de funciones esféricas y en 1787 publica su
memoria sobre observaciones trigonométricas donde aparece su famoso teorema de
resolución plana de triángulos esféricos.
1.2.5 Siglos XIX y XX
La primera gran operación geodésica en el siglo XIX fue la prolongación hacia
España del meridiano de Francia, preparada por Mechain, por encargo del “Bureau des
Longitudes”, en la que intervinieron por parte de Francia Domingo Francisco Arago
(1786-1853) y Juan Bautista Biot (1774-1872) y por parte de España José Chaix y
José Rodríguez y González.
Las medidas de grandes arcos de meridiano y paralelo se sucedieron a lo largo
de este siglo. Como hemos dicho, entre los años 1806 y 1808 Arago y Biot por parte
francesa y Chaix y Rodríguez por parte española prolongaron el meridiano de Francia
en España y enlazaron las islas de Ibiza y Formentera con el continente. En 1817
Struve (1793-1864) y Tanner comienzan la medida del arco del Danubio al Ártico que
terminan en 1849. En 1819 aparece calculado el elipsoide de Walbeck en Rusia. En
1823 Everest (1790-1866) mide el arco de la India y en 1830 publica los datos de su
elipsoide. Este mismo año Airy calcula su elipsoide con arcos de meridiano y paralelo
9
de Gran Bretaña. En 1866 el Coronel norteamericano Clarke (1828-1914) obtiene los
elementos de su primer elipsoide que se utiliza en América del norte y en 1880 publica
el segundo.
Es en el siglo XIX cuando la mayor parte de los científicos de elite establecen y
desarrollan las bases de la geodesia matemática y experimental. Carlos Federico
Gauss (1777-1855), astrónomo, geodesta y matemático, director del observatorio de
Gottinga, inventó el heliógrafo y diseñó, calculó y compensó, utilizando por primera vez
el método de mínimos cuadrados, la red geodésica del reino de Hannover en 1821 y dio
las bases de la geometría diferencial de superficies de uso obligado en geodesia
geométrica y dinámica; también estableció el fundamento teórico de la geodesia con la
definición de la superficie matemática de la Tierra, superficie equipotencial que
posteriormente, en 1872, Listing llamaría geoide. Los fundamentos del método de
mínimos cuadrados habían sido establecidos por Mayer en 1748, Laplace en 1787 y
Legendre en 1805.
Con los trabajos realizados a lo largo del siglo se han determinado entre otros los
siguientes elipsoides:
Cuadro 1.a
Elipsoide
Everest (1830)
Airy (1830)
Bessel (1840)
Clark (1888)
Hayfort (1909)
Semieje mayor (a)
6.377,276 Km.
6.376,542 Km.
6.377,397 Km.
6.378,245 Km.
6.378,388 Km.
Achatamiento (f)
1/300,80
1/299,30
1/299,15
1/293,50
1/297,00
Poincaré (1854-1912), demostró que el achatamiento terrestre tenía un límite,
Bruns (1848-1919), introductor de la geodesia tridimensional, presento su famosa
relación entre el potencial perturbador y la ondulación del geoide.
Otro gran matemático, geodesta y astrónomo fue Bessel (1784-1846), director
del observatorio de Königsberg, que midió el arco prusiano en 1838, determinó el primer
valor fiable del achatamiento de la Tierra y cuyo elipsoide de 1840 ha formado parte de
algunos datums europeos.
En 1888 Küstner observa variaciones periódicas de la latitud de un observatorio
determinada por el método de Talcott y el experimento Berlín-Waikiki de 1891-92,
demuestra que el eje de rotación de la Tierra no está fijo en la corteza. Para el estudio
de este interesante fenómeno se crea en 1899 el Servicio Internacional de Latitudes.
10
Respecto al siglo XX, solo se reseñaran los hechos más sobresalientes. Este
comienza con la aparición de la obra de Helmert (1843-1917) “Die mathematischen und
physikalischen Theorien der höheren Geodäsie”, que viene a sintetizar los trabajos
geodésicos hasta entonces y que ha servido y sirve como libro de referencia
inexcusable. Helmert es el introductor del método de nivelación astrogeodésica para la
determinación del geoide a partir de desviaciones de la vertical. En 1900 crea el
Sistema Gravimétrico de Viena y en 1901 da su fórmula de la gravedad normal.
En 1910 Poincaré resuelve el problema del movimiento del polo para una Tierra
con núcleo líquido.
En 1935 Nicolás Stoyko descubre las variaciones estacionales de la velocidad
de rotación de la Tierra.
En 1937 Kukkamäki estudia la refracción y la nivelación con importantes
resultados. Las observaciones de eclipses de Sol y de ocultaciones de estrellas por la
Luna proporcionan datos suficientes para la determinación de los parámetros del
elipsoide terrestre y para la unión en un mismo sistema de referencia de puntos de la
superficie terrestre alejados. Las observaciones de estos fenómenos proliferan en la
primera mitad del siglo XX.
En 1940 aparecen los trabajos del geodesta finlandés Weiko A. Heiskanen
sobre achatamiento de elipsoides de dos y tres ejes, sobre cartas de anomalías de la
gravedad y sobre correcciones isostáticas siguiendo la hipótesis de Airy.
En 1950 el japonés Takeuchi resuelve por primera vez numéricamente el
sistema de ecuaciones diferenciales que gobierna las deformaciones elásticas de una
Tierra no homogénea.
En 1957, el 4 de octubre se lanza el primer satélite artificial de la Tierra por los
rusos, el Sputnik 1, el Sputnik 2 fue lanzado un mes después y en febrero de 1958 se
lanza el primer satélite norteamericano Vanguard I. En 1958 comienza la geodesia por
satélites con las cámaras Baker-Nunn y fotografía con fondo de estrellas.
En los años setenta se perfecciona el seguimiento laser a la Luna con nuevos
reflectores depositados allí por los satélites Apollo14 y 15 y el Lunakhod II. El
lanzamiento de satélites continúa con el DIAL, el Oscar 19, el PEOLE, los satélites laser
STARLETTE y LAGEOS, el primer satélite altimétrico Geos-3 y el también altimétrico
Seasat-1. El primer satélite GPS del Bloque I, el PRN4 fue lanzado el 22 de febrero de
1978.
Otros importantes avances en esta década los constituyen las investigaciones
sobre movimientos recientes de la corteza con resultados experimentales en el este de
Europa. Se obtienen perfiles de marea gravimétrica. Aparecen modelos de marea
oceánica.
11
Se determina el WGS 72 como sistema geodésico mundial y se termina la fase II
de la retriangulación Europea RETRIG con el sistema ED-79. Los parámetros de
rotación de la Tierra quedan determinados con precisiones de 2 centésimas de segundo
de arco.
El primer satélite GPS del Bloque II fue lanzado en febrero de 1989. Por su parte
de desarrollan y comercializan receptores portátiles GPS de 10 fabricantes. En esta
década las investigaciones se dirigen fundamentalmente a la geodesia integrada,
geodesia operativa, optimización de redes, rotación de la Tierra y determinación del
geoide. Se realizan campañas de comparación de gravímetros absolutos en Sevres. Se
establecen los datums norteamericanos NADS-83 y NAVD-87. Se determina y
comienza a usarse el Sistema Geodésico Mundial del año 1984 (WGS 84). También se
establece el Sistema Europeo ED-87 y la Red Europea Unificada de Nivelación UELN73.
Las técnicas espaciales de posicionamiento alcanzan precisiones relativas de 1
centímetro y los parámetros de rotación de la Tierra se determinan con precisiones de
la milésima de segundo de arco.
La novedad de los años noventa es el uso de satélites medioambientales de
amplio espectro, en 1991 se lanza en ERS-1 de la Agencia Europea del Espacio, en
1992 el TOPEX/Poseidón, misión conjunta de EE.UU. y Francia y en 1995 el ERS-2 de
la ESA. Estos satélites, además de servir como satélites de recursos y oceanográficos,
proporcionan a la geodesia medidas altimétricas con las que se perfeccionan los
modelos de geopotencial, los geoides marinos y la determinación precisa de la SST,
superficie topográfica del mar.
Aparecen en estos años los modernos modelos de geopotencial como los
estadounidenses OSU91A de 1992 y el EGM96 de 1996, entre otros. En paralelo
aparecen los recientes trabajos sobre la determinación del geoide en los países
desarrollados.
1.2.6 Siglo XXI
La geodesia en el siglo XXI da un paso adelante con el ambicioso proyecto
Galileo.
Galileo es la iniciativa europea surgida para desarrollar un Sistema Global de
Navegación por Satélite, de titularidad civil, que proporcione a Europa independencia
respecto a los sistemas actuales: GPS (EEUU) y Glonass (Federación Rusa).
El funcionamiento de Galileo es similar al de sus competidores; todo se basa en
una constelación de satélites que en pocas horas dan la vuelta al mundo. La
12
componente espacial de Galileo está constituida por 30 satélites repartidos en tres
planos orbitales de 23.600 Km. de altura y 55º de inclinación, diseño que mejora su
cobertura en latitudes extremas (cerca de los polos) con respecto a los otros sistemas.
Inicialmente Galileo iba a estar disponible en el 2008 aunque el proyecto acumula
ya tres años de retraso y no podrá comercializar sus primeros servicios hasta 2011,
entre temores de que esa fecha pueda demorarse hasta 2014, entre otros motivos, por
disensiones entre los países participantes.
1.3 Divisiones de la Geodesia
A continuación se muestran las divisiones de la geodesia con sus respectivos
métodos de trabajo.
1.3.1 Astronomía Geodésica
Es aquella parte de la geodesia que con métodos y observaciones astronómicas
trata fundamentalmente de obtener la dirección de la vertical, determina coordenadas
astronómicas (latitud, longitud y azimuts astronómicos). Con los datos obtenidos trata
de determinar el geoide como figura de la Tierra por el método de nivelación
astrogeodésica, y efectuar la reorientación de redes geodésicas en la compensación
con puntos Laplace. Las determinaciones astronómicas, tanto su teoría como sus
métodos son a veces incluidas dentro de la astronomía de posición.
Los métodos de pasos meridianos y de alturas iguales son los más comúnmente
empleados.
1.3.2 Geodesia Geométrica
Es aquella rama de la geodesia en la que los datos de observación están
constituidos por las medidas de ángulos y distancias en la superficie terrestre. Estos
datos son referidos a un elipsoide de referencia para construir las triangulaciones en el
caso de la geodesia clásica bidimensional o bien estudiada en coordenadas
cartesianas, en el caso de la geodesia tridimensional. También son necesarias las
determinaciones de altitudes de puntos sobre una superficie de cota cero. El
conocimiento de la geometría del elipsoide de revolución es fundamental.
13
1.3.3 Geodesia Dinámica
Es aquella rama de la geodesia que es basada en la teoría del potencial, trata de
las medidas de la gravedad, del estudio del campo exterior y de la obtención de la
forma de la Tierra; sus datos fundamentales son las medidas de la gravedad efectuadas
generalmente en superficie, y las perturbaciones observadas en el movimiento de un
satélite artificial. Está relacionada con la geodesia geométrica, con la geofísica, con la
astronomía y con la mecánica celeste. Suele subdividirse en gravimetría, teoría del
campo y consecuencias. No obstante a estas divisiones, hoy en día los métodos
globales de la geodesia actúan en conjunto con datos geométricos y dinámicos a fin de
alcanzar sus objetivos de forma conjunta en la llamada geodesia integrada.
Desde el punto de vista temático, la geodesia puede dividirse en diversas
secciones o capítulos que, aunque relacionados unos con otros, algunos de ellos han
adquirido entidad propia. Así, entre otros, tenemos:
Teoría de la Figura de la Tierra: Constituida por los principios de la teoría del potencial
y teoría de figuras de equilibrio aplicados al campo de gravedad terrestre.
Teoría de Redes Geodésicas: Incluye el estudio de las triangulaciones y
trilateraciones, el cálculo y compensación de redes geodésicas y el cálculo de
coordenadas, con el análisis estadístico de los resultados.
Nivelación: Trata de todo lo referente a la medida de altitudes y establecimiento de
redes altimétricas.
Teoría de la Rotación de la Tierra: Estudia el movimiento de rotación de la Tierra, en
un sistema de referencia fijo en el espacio (precesión y nutación) y en un sistema de
referencia fijo al cuerpo (velocidad de rotación y movimiento del polo) y está
íntimamente ligada a la astronomía en lo referente a los sistemas de tiempo y nutación
y a la geofísica con los modelos del interior de la Tierra. Sus principales datos son las
determinaciones astronómicas clásicas, los resultados de la geodesia doppler, GPS,
laser y VLBI (Very Long Baseline Interferometry).
Gravimetría: Trata de las determinaciones de la gravedad, sus reducciones, cálculo de
anomalías y establecimiento de redes gravimétricas; sirve de base para aplicaciones
geodésicas y geofísicas.
14
1.3.4 Geodesia Física
Está constituida por aquellas teorías y métodos encaminados a la determinación
del geoide, con datos dinámicos o gravimétricos, mediante un análisis del problema de
contorno de la teoría del potencial. Describe los modelos terrestres de comparación
para el establecimiento de la figura de la Tierra, calcula y utiliza fundamentalmente las
anomalías gravimétricas. También estudia el campo exterior de la gravedad.
Mareas Terrestres: Estudia las desviaciones periódicas de la vertical, debidas a las
acciones gravitatorias del Sol y la Luna y sus efectos sobre el geoide y deformaciones
de la Tierra, tanto desde un punto de vista teórico, como numérico y experimental.
1.3.5 Geodesia Tridimensional
Trata el problema de la forma y dimensiones de la Tierra en un sistema de
referencia tridimensional, aquí el elipsoide solo será una superficie auxiliar de la que
puede prescindirse.
1.3.6 Geodesia Espacial
Esta nueva rama de la geodesia trata principalmente con satélites artificiales
cuya observación resulta más cómoda y precisa que la tradicional. Aplica técnicas
tridimensionales y resuelve todos los problemas de la geodesia tanto geométricos como
dinámicos.
Como entidad independiente, se tienen:
Cartografía: Trata del establecimiento de cartas de todo tipo y engloba todas las fases
de trabajo, desde los primeros levantamientos hasta la impresión final de los mapas. Se
incluyen los Sistemas de Información Geográfica.
Topografía: Trata del estudio y aplicación de los métodos necesarios para llegar a
representar el terreno con todos sus detalles, naturales o no, en él existentes, así como
de los instrumentos utilizados.
Fotogrametría: Técnica que trata de estudiar y definir con precisión las formas,
dimensiones y posiciones en el espacio, de un objeto cualquiera, utilizando
esencialmente una o varias fotografías del mismo.
15
Capítulo II
El Datum
Antes de entrar de lleno a la definición del datum y sus alcances, se explicarán
primeramente unos conceptos que forman parte esencial de esta definición.
2.1 El Geoide Terrestre
La palabra geoide significa “forma de la Tierra” y fue introducida por Listing en el
año 1872, mencionado previamente. El geoide constituye una superficie equipotencial
imaginaria que resulta de suponer la superficie de los océanos en reposo y prolongada
por debajo de los continentes y que sería la superficie de equilibrio de las masas
oceánicas sometidas a la acción gravitatoria y a la de la fuerza centrífuga ocasionada
por la rotación y traslación del planeta, de manera que la dirección de gravedad es
perpendicular en todos los lugares.
El geoide tiene en cuenta las anomalías gravimétricas (debidas a la distribución
de las masas continentales y la densidad de los componentes de la Tierra) y el
achatamiento de los polos, por el cual es una superficie irregular con protuberancias y
depresiones.
Aparte de obtener el geoide desde el punto de vista gravimétrico, también se
puede obtener con mediciones astronómicas, las cuales se fundan en la dirección de
gravedad del lugar, y también con mediciones de las deformaciones producidas en la
órbita de los satélites.
A continuación se muestra una imagen del geoide, exagerada para una mejor
comprensión, ya que el geoide realmente se vería como un elipsoide con pequeñísimas
irregularidades, casi imperceptibles. Esto quedará más claro al comparar el geoide con
el elipsoide, lo cual se verá más adelante.
16
Figura 2.a.
Geoide con irregularidades exageradas.
La obtención de una superficie de referencia, con una definición matemática
sencilla que permita efectuar cálculos, es imprescindible para poder realizar la
proyección de los puntos del relieve terrestre sobre la misma y permitir la elaboración
de cartas, mapas y planos. El geoide no puede ser la superficie de referencia adoptada
por lo irregular, se toma entonces la hipótesis de escoger un elipsoide de revolución que
se adapte en lo posible al geoide, denominando a este elipsoide, como elipsoide de
referencia.
2.2 El Elipsoide Terrestre
Debido a las irregularidades que presenta la superficie física de la Tierra, se hace
necesario asimilarla a una cierta superficie más o menos ideal que reproduzca ciertas
magnitudes físicas, es lo que denominamos un "modelo", en el caso del geoide este
sería el modelo dinámico.
Desde el punto de vista geométrico, el modelo de la Tierra puede considerarse
en primera aproximación, como una esfera de radio igual a 6.371 kilómetros, y en
17
segunda aproximación, como un elipsoide de revolución, este elipsoide es el resultado
de revolucionar una elipse sobre su eje menor.
La esfera y el elipsoide son equivalentes, tanto en área como en volumen, y el
radio de la esfera, llamado radio medio de la Tierra (RMT), es la media aritmética de los
tres semiejes del elipsoide, con RMT = ((2 x a) + b) / 3.
En cuanto a las irregularidades de la Tierra son detectables y no extrapolables a
todos los puntos de la misma, ya que no existe un único modelo matemático que
represente toda la superficie terrestre, por lo que cada continente, nación, o
determinada región emplean un elipsoide de referencia distinto, que se adapte mejor a
la forma de la Tierra en la zona a cartografiar, dejando el eje menor del elipsoide
paralelo al eje de rotación de la Tierra, y el eje mayor paralelo al plano del ecuador
terrestre.
Los elementos del elipsoide de revolución que fue adoptado como "elipsoide
internacional" por la Asamblea General de la Unión Geodésica y Geofísica Internacional
(U.G.G.I.) celebrada en Madrid en 1924 son:
Radio ecuatorial (a) = 6.378,388 Km.
Achatamiento (f) = (a - b) / a = 1/297
De los que se deduce:
Radio polar (b) = 6.356,912 Km.
Excentricidad (e) = ((a2 - b2)1/2) / a
2ª Excentricidad (e´) = ((a2 - b2)1/2) / b
18
Pe
b
Qe
a
c
a
Qe´
Pe´
Figura 2.b.
El elipsoide.
Como consecuencia de los resultados obtenidos mediante la observación de
satélites artificiales, en la Asamblea General de la Unión Astronómica Internacional
(U.A.I.), celebrada en Hamburgo en 1964, se recomendó trabajar con los siguientes
elementos:
a = 6.378,160 Km.
f = 1/298,25
Últimamente, en la Asamblea General de la Unión Astronómica Internacional que
se celebró en Grenoble en 1976, se adoptó un nuevo sistema de constantes
astronómicas, designado por IAU (1976), que entró en vigor el 1 de enero de 1984, en
él se toma:
a = 6.378,140 Km.
f = 1/298,257
Tras la definición del elipsoide de referencia, surge la pregunta sobre la
necesidad del mismo y su relación con las observaciones que se efectúan sobre la
superficie terrestre. Debe quedar claro que estas últimas deberán ser corregidas
(reducción) y referidas al elipsoide, pues éste último será la base para la posterior
elaboración de cartas, mapas y planos.
19
Para la reducción es necesario el conocimiento de las desviaciones entre la
superficie real terrestre y la del elipsoide de referencia. Para ello tendremos que:
1) Determinar la altura de los puntos que están sobre la superficie terrestre.
2) Medir las desviaciones de la vertical en dichos puntos.
3) Calcular la fuerza gravitatoria en los puntos indicados, para lo cual suelen
utilizarse los gravímetros.
Estas determinaciones entran de lleno en el campo de la geodesia física, y su
cálculo se realiza basándose en la teoría del potencial gravitatorio y las ecuaciones de
Laplace, entre otros.
2.3 Relaciones entre el Geoide y el Elipsoide
A continuación primeramente se definirán unos parámetros que intervienen en
los siguientes análisis de las relaciones entre el geoide y el elipsoide para un
determinado punto de la superficie de la Tierra.
Vertical Geocéntrica: Esta vertical es la normal a una esfera con centro en el centro de
masas de la Tierra (este centro es un punto en común que tienen estas verticales).
Vertical Geodésica: Esta vertical es la normal al elipsoide (estas verticales no tienen
un punto en común).
La vertical geocéntrica y la vertical geodésica coinciden solo en el ecuador y en
el polo.
Vertical Astronómica: Esta vertical es la normal al geoide (estas verticales no tienen
un punto en común).
Además para los análisis, el centro de masas de la Tierra es coincidente con el
centro del elipsoide.
20
2.3.1 Ángulo Radial de la Vertical
Este ángulo es el que se forma entre la vertical astronómica o vertical física y la
vertical geocéntrica para un determinado punto, medible sobre el meridiano, y tiene un
valor igual a cero en el ecuador y en los polos, pero en otras latitudes formará un
ángulo, al que se le llama ángulo radial de la vertical. Este ángulo es máximo alrededor
de los 45º de latitud, alcanzado un valor de unos 11,5 minutos de arco (no confundir
este concepto con el de la desviación de la vertical). Esto ocurre ya que la Tierra tiene
forma elipsoidal debido a la rotación, de no existir ésta, la dirección de la gravedad
siempre coincidiría con el centro de masas de la Tierra.
Me
rid
ian
oC
ele
ste
Vertical Astronómica
Pt
Superficie de la Tierra
Geoide
Elipsoide
θa
Vertical Geocéntrica
b
θa = Ángulo Radial
c
Qt
a
Figura 2.c.
Angulo radial de la vertical.
2.3.2 Desviación de la Vertical
Se conoce como desviación de la vertical, al ángulo que existe entre la vertical
astronómica y la vertical geodésica, para un determinado punto, medible sobre el
21
meridiano, su valor varía desde fracciones de segundo hasta un minuto de arco,
especialmente en aquellas partes del geoide en que la protuberancias y depresiones
son máximas, como en zonas cercanas al sur de la India, alrededor de Nueva Guinea y
al weste de Irlanda.
Cuando la desviación de la vertical es igual a cero, quiere decir que la vertical
astronómica y la vertical geodésica, están contenidas en el mismo plano de latitud, o en
planos distintos, pero paralelos.
Me
rid
ian
oC
ele
ste
Vertical Astronómica
Pt
Superficie de la Tierra
Geoide
Elipsoide
θv
Vertical Geodésica
b
c
θv = Desviación de
Qt
a
Figura 2.d.
Desviación de la vertical.
2.3.3 Desviación Sobre el Meridiano
Esta desviación es el ángulo que se forma entre la vertical geodésica y la vertical
astronómica, para un determinado punto, medible sobre el vertical primario, su valor al
igual que la desviación de la vertical varía desde fracciones de segundo hasta un
minuto de arco, y son máximas en las mismas zonas.
22
Cuando la desviación sobre el meridiano es igual a cero, quiere decir que la
vertical astronómica y la vertical geodésica, están contenidas en el mismo plano de
meridiano, o en planos distintos, pero paralelos.
Ve
rtic
al
Pr
im
ari
o
Vertical Astronómica
Superficie de la Tierra
Geoide
Elipsoide
θm
al Meridiano Geodésico.
θm = Desviación Sobre
c´
Figura 2.e.
Desviación sobre el meridiano.
2.3.4 Ondulación Geoidal
La desigual distribución de la gravedad superficial, y de lo local de las
perturbaciones, causa que existan zonas de la Tierra por encima del geoide y por
debajo de éste, a esta diferencia se la conoce como ondulación geoidal, o también
conocida como altura o separación geoidal, es la diferencia o separación entre el
elipsoide y el geoide, y su magnitud va a depender de la mayor o menor diferencia
gravitatoria.
Estas diferencias gravitatorias son causadas por la composición terrestre y la
presencia de la gran masa de agua en los océanos, que causa una menor atracción, y
23
hace que, por lo general, el geoide quede por encima del elipsoide en la zona
continental y por debajo en la zona oceánica.
Nivel Medio del Mar
Anomalía
Gravitatoria
Negativa
Anomalía
Gravitatoria
Positiva
Superficie de la Tierra
Geoide
Decremento
de Masa
Incremento
de Masa
Elipsoide
Ondulación Geoidal
Figura 2.f.
Ondulación geoidal.
2.4 Sistemas de Coordenadas Terrestres
Los sistemas de coordenadas geodésicos han sido de escaso interés para la
mayoría de los técnicos, hasta la llegada de los modernos sistemas de posicionamiento
por satélite, por lo que se hace necesario definir las distintas coordenadas según su
referencia para identificar sus diferencias y aplicaciones.
2.4.1 Coordenadas Astronómicas
Latitud Astronómica: Es el ángulo formado entre la vertical astronómica de un punto y
el ecuador celeste. Esta latitud es la que resulta directamente de observaciones de
cuerpos celestes, por ende es la verdadera latitud para un determinado punto. Se mide
de 0º a 90º (Norte y Sur). Ecuador celeste (0º), hacia el polo norte y sur hasta los 90º
(ídem para las latitudes geodésicas y las geocéntricas).
Longitud Astronómica: Es el ángulo formado entre la vertical astronómica de un punto
y el meridiano celeste de Greenwich. Esta longitud, al igual que la latitud resulta
directamente de observaciones de cuerpos celestes. Se mide de 0º a 180º (Este y
Weste). Meridiano celeste de Greenwich (0º), hacia el este y weste hasta los 180º (ídem
para las longitudes geodésicas y las geocéntricas).
24
Éstas son las coordenadas observadas por los navegantes, que usan un
sextante y un reloj muy exacto para posicionarse, basándose en la rotación de la Tierra,
además, las observaciones astronómicas, también pueden ser determinadas con
instrumentos ópticos que utilizan dispositivos niveladores los cuales hacen coincidir el
eje vertical del instrumento con la dirección de la gravedad, esto quiere decir que son
perpendiculares al geoide, por consiguiente las posiciones astronómicas coinciden con
el geoide, al cual, como ya se nombró unos puntos atrás, no se le puede aplicar un
modelo matemático, ya que este es irregular, al contrario del elipsoide, que es la
superficie regular más próxima a la Tierra.
Yendo de menor a mayor precisión, se tiene a la esfera, el elipsoide, el geoide, y
la superficie real de la Tierra.
Las coordenadas astronómicas también son llamadas coordenadas geográficas,
aunque también se les denomina así a las coordenadas geodésicas.
2.4.2 Coordenadas Geodésicas
Latitud Geodésica: Es el ángulo formado entre la vertical geodésica de un punto y el
ecuador celeste. Se mide de 0º a 90º (Norte y Sur).
Además, debido a la forma achatada del elipsoide, la longitud de un grado de
latitud geodésica no es el mismo para todo el elipsoide, aumentando aproximadamente
de 59,7 millas náuticas en el ecuador a aproximadamente 60,3 millas náuticas en los
polos, estas diferencias en el grado de latitud geodésica se analizarán en el capítulo 3,
punto 3.2.1.
Cuando la posición sea geodésica, es necesario que se dé a conocer, para no
confundirla con la astronómica, ya que existe una pequeña diferencia entre sus
verticales para un determinado punto de la Tierra, conocido como desviación de la
vertical, visto previamente, aunque esta diferencia no tiene mayor relevancia desde el
punto de vista del navegante.
Longitud Geodésica: Es el ángulo formado entre la vertical geodésica de un punto y el
meridiano celeste de Greenwich. Se mide de 0º a 180º (Este y Weste).
Esta longitud difiere de la longitud astronómica debido a la diferencia entre sus
verticales, lo que se conoce como desviación sobre el meridiano, visto previamente.
Las coordenadas geodésicas son las que se utilizan para el trazado de cartas,
mapas y planos.
25
2.4.3 Coordenadas Geocéntricas
Latitud Geocéntrica: Es el ángulo formado entre la vertical geocéntrica de un punto y
el ecuador celeste. Se mide de 0º a 90º (Norte y Sur).
Si referimos las latitudes geocéntricas al elipsoide, los paralelos de latitud son
círculos menores exactos, igual que los paralelos de latitud geodésicos, pero separados
entre si una cierta distancia, a diferencia de las latitudes astronómicas, los paralelos de
latitud son círculos menores levemente irregulares.
Longitud Geocéntrica: Es el ángulo formado entre la vertical geocéntrica de un punto
y el meridiano celeste de Greenwich. Se mide de 0º a 180º (Este y Weste).
Las longitudes geodésicas y geocéntricas son las mismas, ya que ambas se
refieren a superficies regulares, por último cabe agregar que las coordenadas celestes
(declinación y ángulo horario de un astro) son las mismas que las coordenadas
geocéntricas, ya que ambas tienen como referencia al centro de masas de la Tierra.
A continuación se muestra una figura con las distintas latitudes y longitudes.
M
id
er
no
ia
e
st
le
Ce
Vertical Astronómica
Superficie de la Tierra
Geoide
Elipsoide
Pt
Vertical Geodésica
no
de
Gre
enw
ich
Vertical Geocéntrica
Ondulación Geoidal
Me
ridi
a
b
c ψ
λ2
λ
a
φ
ϕ
a
Qt
λ1
Figura 2.g, coordenadas angulares.
26
Con:
ϕ = latitud astronómica.
φ = latitud geodésica.
ψ = latitud geocéntrica.
λ1 = longitud astronómica.
λ = longitud geodésica.
λ2 = longitud geocéntrica.
2.4.4 Coordenadas Rectangulares Geocéntricas
Definido las distintas coordenadas, es posible definir un sistema de coordenadas
cartesianas (x, y, z). Asociado de esta forma, tenemos un triedro en el que el eje X
suele tomar la dirección del meridiano de origen, el eje Z es perpendicular al plano
ecuatorial, y el eje Y es perpendicular a los otros dos. El origen de este nuevo sistema
de referencia puede ser el centro del elipsoide (c), o bien el centro de masas de la
Tierra, ver figura 2.h.
Z
Pe
b
P
(x, y, z)
(φ, λ , h)
h
c
Qe
λ
φ
X
Pe´
Figura 2.h.
Coordenadas rectangulares geocéntricas
y coordenadas geodésicas.
a
Qe´ Y
27
A continuación se muestran unas ecuaciones con las que a partir de las
coordenadas geodésicas (φ, λ, h) se pueden obtener las coordenadas rectangulares
geocéntricas (x, y, z):
x = (V + h) x Cos φ x Cos λ
(2-1)
y = (V + h) x Cos φ x Sen λ
(2-2)
z = (k x V + h) x Sen φ
(2-3)
Donde:
V = a / (1 - (1 - k) x Sen2 φ)1/2
k = b2 / a2 = (1 - f)2
φ = latitud geodésica.
λ = longitud geodésica.
h = altura normal al elipsoide.
f = achatamiento.
a y b = semiejes mayor y menor del elipsoide, respectivamente.
Con (y) positivo si el signo de la longitud geodésica es Este, y (z) positivo si el
signo de la latitud geodésica es Norte, por ende si los signos son Weste y Sur serán
negativos.
A continuación se muestra el caso contrario al anterior, en el cual a partir de las
coordenadas rectangulares geocéntricas (x, y, z) se pueden obtener las coordenadas
geodésicas (φ, λ, h):
Para este caso el valor de φ se obtiene mediante un proceso de iteración con la
siguiente expresión:
C = z / Tg φ + a x (1 - k) / (1 + k x Tg2 φ)1/2
Donde:
C = (x2 + y2)1/2
(2-4)
28
La primera aproximación de φ se puede obtener con:
φ = arcTg (z / (k x (x2 + y2)1/2))
λ se obtiene directamente con:
λ = arcTg (y / x)
(2-5)
Con el valor de φ que satisface el valor de C, se determina h, con:
h = (z / Sen φ) - k x V
(2-6)
En el Anexo D se pueden apreciar las obtenciones matemáticas de estas
equivalencias entre coordenadas.
Con el desarrollo de la geodesia cósmica, los sistemas de coordenadas
espaciales han cobrado una gran importancia. La resolución de los problemas
geodésicos con estos sistemas se denomina geodesia tridimensional.
2.4.5 Coordenadas Rectangulares Planas
En general, el sistema de coordenadas geográficas es muy adecuado para
grandes superficies, pero para pequeñas zonas se utilizan las coordenadas
rectangulares planas, por lo simple de su utilización.
Estas coordenadas empezaron a utilizarse durante la Primera Guerra Mundial,
actualmente, el empleo de sistemas de cuadrícula es prácticamente universal, sin
embargo, el cambio de un sistema a otro no es fácil, pues la superficie del elipsoide no
es desarrollable, es decir, no puede extenderse sobre un plano sin sufrir deformaciones
ni rasgaduras.
La solución que se ha adoptado es la de representar la superficie del elipsoide
sobre un plano según una determinada ley matemática.
29
Existen gran cantidad de leyes matemáticas que permiten la representación del
elipsoide sobre un plano, pero una de las premisas fundamentales es la de obtener la
mínima distorsión al proyectar los elementos de una superficie a la otra. Es entonces
cuando entramos de lleno en los dominios de la cartografía y de las proyecciones
cartográficas.
En el Anexo A se puede apreciar una descripción general de las Proyecciones
Cartográficas.
Por Ultimo, los distintos sistemas de coordenadas definidos, aunque parezcan
relativamente complejas, son más que simplificaciones de un problema todavía más
complicado, pues se han despreciado los siguientes efectos:
El eje de rotación instantáneo no está fijo con respecto a la masa sólida de la
Tierra, sino que está afectado de un cierto movimiento, denominado movimiento polar.
Este efecto fue predicho por Euler en 1765, pero no ha sido determinado con exactitud
hasta mucho tiempo después, como resultado, la posición del polo norte (intersección
del eje de rotación con la superficie terrestre) puede variar alrededor de 5 a 10 metros
cada año. Por esta razón, lo más usual es definir las coordenadas con respecto a un eje
medio, internacionalmente admitido, y no con respecto al eje de rotación instantáneo.
Por otra parte, el meridiano de origen no pasa por un punto en particular de
Greenwich, sino que se define como el valor medio de las longitudes adoptadas para
una serie de observatorios en todo el mundo. En este sentido, en el año 1988, el
International Earth Rotation Service (IERS), cuya sede está en París, definió el eje de
rotación medio, el IERS Reference Pole (IRP, Polo Norte de Referencia) y el meridiano
de origen, denominado el IERS Reference Meridian (IRM).
Por último, si nos centramos en las coordenadas astronómicas, debemos saber
que es posible que las direcciones de la vertical astronómica (según el vector de
gravedad) puedan ser paralelas en una pequeña zona de la superficie terrestre, lo que
implicaría que la latitud y la longitud astronómica serían la misma para esta pequeña
zona.
30
2.5 El Datum
El datum se define como el punto donde el geoide y el elipsoide son tangentes y
coincidentes desde el punto de vista de la vertical astronómica y la vertical geodésica.
Cada datum se compone de:
1) Un punto fundamental.
2) Un elipsoide de referencia.
Respecto al punto fundamental es aquel punto en el cual coinciden la vertical
astronómica y la vertical geodésica, además de un azimut en una dirección con origen
en el punto fundamental. En cuanto al elipsoide de referencia, éste se define por el
semieje mayor y el achatamiento.
El elipsoide se aproxima al geoide de tal forma que, cuanto más cerca del datum
(punto fundamental) nos hallemos, mejor resultados se obtienen, es por tanto éste, un
método local, válido con precisión únicamente para una zona restringida de la Tierra.
Actualmente, se están utilizando como referencia elipsoides centrados en el centro de
masas de la Tierra, consiguiendo una aproximación en toda la superficie terrestre. Es
por esto que el elipsoide geocéntrico debe ser calculado cuidadosamente para
minimizar el error global, lo cual se consigue combinando las mediciones terrestres con
observaciones por satélite. Cabe agregar que los elipsoides geocéntricos no poseen
punto fundamental, pero igual se les denomina datums (datums geocéntricos).
La forma habitual de determinar las coordenadas de un punto es enlazar por
medios topográficos con una red geodésica. Todos los puntos de ésta se han calculado
por triangulación y observaciones topográficas en relación al datum. El hecho de que se
conozcan con precisión las coordenadas astronómicas y el azimut en el datum permite
que se puedan calcular las coordenadas referidas al elipsoide. De esta forma se tiene
que las coordenadas geodésicas están referidas a un sistema geodésico, elipsoide y
datum. El mismo punto de la superficie terrestre tendrá distintas coordenadas en
distintos sistemas, con una oscilación típica de 100 a 300 metros. Esto hace que el
sistema geodésico sea de importancia en escalas superiores a 1:400.000.
31
Superficie de la Tierra
Vertical Astronómica
Geoide
Datum Local
Vertical Geodésica
Pe´
Datum Geocéntrico
Pe
Punto Fundamental
b´
b
c´
cm
a´
a
Qe´
Qe
Figura 2.i.
Datum geocéntrico y local.
Con:
cm = centro de masas de la Tierra, coincidente con el centro del elipsoide geocéntrico.
c´ = centro del elipsoide local.
2.5.1 Tipos de Datums
Respectó al datum, este puede ser horizontal o vertical (según su referencia) y
además el datum puede ser local o geocéntrico, para el caso del elipsoide.
Los datum horizontales y verticales no es algo propio del elipsoide, sino que
puede abarcar varias superficies, según cuál se tome como referencia, como se verá a
continuación.
El datum horizontal, es cualquier modelo para ubicar posiciones en la superficie
de la Tierra, si se considera al elipsoide como datum horizontal, las cartas de
navegación serían un ejemplo de esto.
32
En cambio un datum vertical es cualquier superficie nivelada (por ejemplo el
Nivel Medio del Mar) que se toma como superficie de referencia a partir de la cual se
calculan las elevaciones, usualmente se escoge el geoide, el cual es la superficie
equipotencial del campo gravitacional terrestre que mejor se aproxima al nivel medio del
mar.
Las alturas referidas al geoide, se llaman alturas ortométricas (H), y son las que
usualmente se encuentran representadas en las cartas topográficas. Si el geoide es
reemplazado por un elipsoide, se puede definir la altura elipsoidal (h), también llamada
altura geométrica.
En cuanto a los datums locales, en el mundo existen varios centenares, y como
se nombró previamente, son referenciados a un punto conveniente de referencia (punto
fundamental), de la zona a cartografiar. Actualmente los datum horizontales locales se
están dejando de lado con la aparición del datum horizontal geocéntrico WGS 84 (World
Geodetic System 1984), el NAD83 es otro tipo de datum horizontal geocéntrico, de esto
se desprende que los datum geocéntricos carecen de punto fundamental, y que las
posiciones determinadas en los datum horizontales locales, serán más próximas a las
posiciones astronómicas que los datum horizontales geocéntricos, especialmente cerca
del punto fundamental.
2.5.2 Universo de Elipsoides y Datums Utilizados en Geodesia
Respecto al universo de elipsoides y datums que se utilizan en geodesia, estos
se pueden apreciar en el Anexo B.
2.5.3 El Datum Según su Área de Aplicación
Respecto al datum según su área de aplicación, existe una gran variedad de
datums para una misma zona, por esto solo se mostrarán los datums que se utilizan en
Sudamérica, los cuales se pueden apreciar en el Anexo C.
2.5.4 Diferencias en el uso de Distintos Datums
Como se nombró previamente, en el mundo existen una gran cantidad de
datums, cada uno con un ámbito de aplicación distinto, y no puede ser empleado fuera
de la zona geográfica para la que fue creado, por ejemplo, el datum NAD 27 es de uso
exclusivo de América del norte, en cambio el datum ED50 es de uso exclusivo de
Europa.
33
Solo algunos datums se pueden aplicar globalmente como el WGS 84, pero al
ser un datum global, siempre existirán diferencias al compararla con las posiciones
astronómicas, y por ende siempre tendrán diferencias con los datums locales, es por
esto que un punto tiene coordenadas geográficas distintas en función del datum de
referencia.
En el recorte 2.a se muestra un ejemplo de esto, en el cual se muestra el
rotulado de una carta náutica, en el que, en la parte inferior del rotulado se muestra un
valor de corrección en latitud y longitud para posicionar un punto referido al datum NAD
27, también en el rotulado hacen referencia a que el datum NAD 83 es equivalente con
el WGS 84, esto se debe esencialmente a que las diferencias entre ambos son del
orden del metro, algo imperceptible debido a la escala a la cual está proyectada esta
carta.
Recorte 2.a.
Rotulado de una carta náutica.
34
A continuación se muestran otros ejemplos, para los cuales se considera una
latitud de 39º 50´ S y una longitud de 73º 15´ W, para distintos datums, con su
respectiva posición transformada referida al datum WGS 84.
Cuadro 2.a.
Posición a considerar perteneciente al área de aplicación del datum.
Datum
Elipsoide
P. SOUTH A. 1956
International 1924
SOUTH A. 1969
South A. 1969
Posición a
Considerar
L = 39º 50´ S
G = 73º 15´ W
L = 39º 50´ S
G = 73º 15´ W
Posición Transformada
Referida al Datum WGS 84
L = 39º 49´ 39,43´´ S
G = 73º 14´ 50,66´´ W
L = 39º 49´ 58,46´´ S
G = 73º 14´ 56,97´´ W
Cuadro 2.b.
Posición a considerar NO perteneciente al área de aplicación del datum.
Datum
Elipsoide
ARC 1950
Clarke 1880
BISSAU
International 1924
SCHWARZECK
Bessel 1841
IRELAND 1965
Airy (Modificado)
KERTAU 1948
Everest (1948)
SOUTH ASIA
Fischer 1960 (Mod.)
WAKE-E. 1960
Hough
Posición a
Considerar
L = 39º 50´ S
G = 73º 15´ W
L = 39º 50´ S
G = 73º 15´ W
L = 39º 50´ S
G = 73º 15´ W
L = 39º 50´ S
G = 73º 15´ W
L = 39º 50´ S
G = 73º 15´ W
L = 39º 50´ S
G = 73º 15´ W
L = 39º 50´ S
G = 73º 15´ W
Posición Transformada
Referida al Datum WGS 84
L = 39º 49´ 42,47´´ S
G =73º 14´ 53,15´´ W
L = 39º 49´ 51,69´´ S
G =73º 14´ 56,10´´ W
L = 39º 49´ 57,63´´ S
G = 73º 15´ 25,99´´ W
L = 39º 50´ 23,19´´ S
G = 73º 15´ 18,90´´ W
L = 39º 49´ 48,99´´ S
G = 73º 15´ 9,87´´ W
L = 39º 49´ 59,69´´ S
G = 73º 15´ 0,16´´ W
L = 39º 49´ 55,73´´ S
G = 73º 15´ 4,74´´ W
Las distintas posiciones transformadas de los cuadros 2.a y 2.b, se obtuvieron
utilizando un programa geodésico, el cual se basa en el método de transformación de 3
parámetros (Δx, Δy, Δz). Con este método se obtienen exactitudes alrededor de 8 a 10
metros.
En el Anexo C se pueden apreciar los 3 parámetros de transformación (Δx, Δy,
Δz), de los datum utilizados en Sudamérica relacionados con el WGS 84.
Cabe agregar que existen varios métodos de transformación, aparte de la
transformación de 3 parámetros, tales como la transformación de 7 parámetros,
Molodensky y regresión múltiple, entre otros.
En el punto 4.5.3 se muestra el método de transformación estándar de
Molodensky.
35
Capítulo III
El Elipsoide como Superficie de Referencia
En los cálculos realizados en navegación se considera a la Tierra como una
esfera, que en realidad es más semejante a un elipsoide, por lo que en algunos casos
existen unas pequeñas diferencias, tanto en distancias, como por paralaje (Luna), tales
diferencias son las que se mostrarán en este capítulo, con resoluciones matemáticas,
apoyadas con gráficos para una mayor comprensión.
3.1 La Esfera y el Elipsoide
En este punto se mostrarán unos análisis de las diferencias básicas entre la
esfera y el elipsoide, así como también las fórmulas para determinar estas diferencias.
Tales análisis se aplicarán a los distintos puntos tratados en este capítulo.
Primero que nada se tienen que identificar las diferencias entre las coordenadas
geocéntricas y las geodésicas.
Recapitulando, en cuanto a las coordenadas geocéntricas, todas las latitudes
tienen un punto en común, el centro de masas de la Tierra (centro del elipsoide), a
diferencia de las coordenadas geodésicas las latitudes no tienen un punto en común,
dicho de otro modo, la vertical geocéntrica forma un ángulo distinto al que forma la
vertical geodésica con el ecuador, para un mismo punto sobre el elipsoide, solo en el
ecuador y en el polo ambas verticales coinciden.
En la figura 3.a se muestra un ejemplo de lo anterior, en la cual para una latitud
geocéntrica (ψ), le corresponde una latitud geodésica (φ).
En cuanto a las longitudes, ambas coordenadas son afines, ya que comparten el
mismo eje, eje polo norte-sur, por ser superficies regulares.
Cabe agregar que para todas las fórmulas de este capítulo, a las coordenadas
geodésicas se las pueden considerar como coordenadas astronómicas o geográficas
(recordando que este último término también se utiliza para las geodésicas), ya que las
diferencias entre las coordenadas geodésicas y las astronómicas son despreciables
desde el punto de vista del navegante.
36
del
e
t
s
e
Cel
o
n
idia
Mer
Zψ
r
ado
v
r
e
Obs
Zφ
θ
Horizonte
Sensible
Circunferencia de Referencia
Elipse
Qe
a
ψ
Pe
φ
Horizonte
Verdadero
b
θ
c´
c
Figura 3.a.
Diferencia entre la esfera y el elipsoide.
Con:
Zψ = zenit geocéntrico de ψ.
Zφ = zenit geodésico de φ.
θ = diferencia entre las verticales geodésica y geocéntrica, que le corresponde a φ.
a y b = semiejes mayor y menor del elipsoide, respectivamente.
Qe, Pe y c = ecuador, polo y centro del elipsoide, respectivamente.
La latitud geocéntrica (ψ) se puede obtener con la siguiente fórmula:
37
ψ = arcTg (k x Tg φ)
(3-1)
Donde:
k = b2 / a2 = (1 - f)2
φ = latitud geodésica.
f = achatamiento.
a y b = semiejes mayor y menor del elipsoide, respectivamente.
En el Anexo D se puede apreciar la obtención matemática la fórmula (3-1).
Además de la figura 3.a se deduce que θ es:
θ = φ - ψ = φ - arcTg (k x Tg φ)
(3-2)
Lo expresado en la figura 3.a a primera vista parece ser algo irregular, ya que la
normal a la esfera es muy distinta a la normal al elipsoide, teniendo presente que para
la forma de la Tierra, como primera aproximación se tiene a la esfera, como segunda al
elipsoide, y como tercera al geoide.
El salto entre la esfera y el elipsoide tiene diferencias máximas cercanas a 21
kilómetros en la posición, y el salto entre el elipsoide y el geoide tiene diferencias
máximas cercanas a los 2 kilómetros.
Un ejemplo claro de lo mostrado en la figura 3.a, utilizando la fórmula (3-1), sería
relacionar las coordenadas celestes con las coordenadas geodésicas, para un punto de
la superficie del elipsoide, la cual sería:
Para una declinación (ψ) de 39º 48,6´ S, con un ángulo horario de Greenwich de
73º al W, le corresponde una latitud geodésica de 40º N y una longitud de 73º W.
Este es el motivo por el cual se relacionan las coordenadas celestes con las
coordenadas geográficas solo para grandes distancias (astros), ya que ambas
coordenadas coinciden en un único valor (figura 3.b). Es conveniente ver lo que sucede
al proyectar las coordenadas celestes sobre la superficie de la Tierra, y un ejemplo de
esto se ve en el punto 3.2.4 (triángulo de posición).
Además del ejemplo anterior se desprende que la declinación y la latitud
geocéntrica son lo mismo, tanto para cortas como para grandes distancias, ya que
ambas se refieren al centro de masas de la Tierra (c).
38
Como ya se identificaron en detalle a las diferencias entre las coordenadas
geocéntricas y las geodésicas, a continuación se mostrará lo que sucede para una
latitud geocéntrica y una geodésica de igual ángulo respecto del ecuador.
Lo que ocurre es que la latitud geodésica (φ) se encuentra a cierta distancia
hacia el ecuador de la latitud geocéntrica (ψ2), ambas latitudes de igual ángulo respecto
del ecuador, correspondiéndole a la latitud geodésica (φ) una latitud geocéntrica distinta
(ψ).
Esta cierta distancia expresada horizontalmente viene a ser la distancia horizontal
entre las verticales geodésica y geocéntrica (Dv), de lo que se deduce que Dv es
perpendicular a las verticales, y que ambas verticales son paralelas, figura 3.b.
te
eles
C
no
ridia
e
M
Z
r
ado
v
r
e
Obs
del
Z
2
θ
Vertical Geocéntrica
Vertical Geodésica
Dv
Circunferencia de Referencia
Elipse
Horizonte Sensible
Qe
ψ2
ψ
a
Pe
φ
θ
b
Horizonte Verdadero
c´
c
Figura 3.b.
Latitudes geocéntrica y geodésica de igual ángulo respecto del ecuador.
39
La distancia horizontal entre las verticales geodésica y geocéntrica (Dv), se
puede obtener con la siguiente fórmula:
Dv = a x Sen φ x (1 - k) / (1 + k x Tg2 φ)1/2
(3-3)
Donde:
k = b2 / a2 = (1 - f)2
φ = latitud geodésica.
f = achatamiento.
a y b = semiejes mayor y menor del elipsoide, respectivamente.
En el Anexo D se puede apreciar la obtención matemática la fórmula (3-3).
El valor máximo que puede alcanzar Dv es alrededor de 21 kilómetros.
3.2 Aplicaciones del Elipsoide
A continuación se mostrarán en detalle los casos de distancias y paralaje para
una Tierra elipsoidal, ya que son los casos más relevantes al compararlo con una Tierra
esférica, aunque del punto de vista de la navegación las diferencias no tienen mayor
relevancia, pero el fin de mostrar las diferencias, es que las diferencias existen, lo que
nos da un entendimiento más profundo del tema.
3.2.1 Distancias en Latitud
En este punto se mostrarán las distancias en el datum (elipsoide), que son las
distancias que se encuentran en las cartas de navegación, ya que estas utilizan como
referencia a esta superficie.
Estas distancias en realidad son distancias de distintas magnitudes dependiendo
de las latitudes de la carta, o dicho de otra forma, tomando como referencia al grado
geodésico, que los grados no son iguales, los cuales para zonas cercanas a los polos,
un grado de latitud geodésica mide alrededor de 60,3 millas náuticas, (ver ejemplo 1),
para zonas cercanas al ecuador 59,7 millas náuticas, (ver ejemplo 2), y solo para
latitudes cercanas a 45º, un grado mide aproximadamente 60,0 millas náuticas, (ver
ejemplo 3), cabe recalcar que estas diferencias son producidas por el achatamiento de
la Tierra.
40
En cuanto a las distancias de arcos de la elipse, no existe una fórmula exacta,
solo aproximaciones, ya que la integral de línea (1) aplicada a la elipse no tiene solución
con las funciones actuales, a continuación se muestra un ejemplo de esto.
y = f(x), x perteneciente [xa, xb]
xb
L = (1 + f´(x)2)1/2 dx
(1)
xa
Resolviendo para la elipse se tiene:
f(x) = b x 1 - x2
a2
1/2
f´(x) =
-b x x
a x 1 - x2
a2
f´(x)2 =
b2 x x2
a x 1 - x2
a2
2
1/2
4
Con lo que la integral de línea de la elipse queda como sigue:
xb
L =
1+
xa
b2 x x2
a x (1 - (x2 / a2))
4
1/2
dx
Esta forma de integral no tiene un desarrollo integrable, pasa lo mismo al tratar el
problema con los otros tipos de integral de línea.
Cuando las integrales tienen esta forma, lo que se hace es desarrollar la
expresión radical a través del teorema del binomio, incluyendo solo un número limitado
de términos, e integrar por separado, con lo que se obtienen excelentes resultados de
aproximación.
A continuación se muestra la fórmula clásica de distancia del arco de la elipse (S)
entre el ecuador y una latitud geodésica cualquiera, en función de los senos de los
múltiplos de la latitud, la cual se obtiene expresando la integral de línea de la elipse en
función de la latitud geodésica, y procediendo como se menciona en el párrafo anterior,
la cual es como sigue:
41
S(φ) = a x k x [B0 x (2 x π / 360) x φ - (1 / 2) x B1 x Sen (2 x φ) + (1 / 4) x B2 x Sen (4 x φ) 1 / 6 x B3 x Sen (6 x φ) + ...]
(3-4)
Donde:
B0 = 1 + (3 / 4) x (1 - k) + (45 / 64) x (1 - k)2 + (175 / 256) x (1 - k)4
B1 = (3 / 4) x (1 - k) + (15 / 16) x (1 - k)2 + (525 / 512) x (1 - k)4
B2 = (15 / 64) x (1 - k)2 + (105 / 256) x (1 - k)4
B3 = (35 / 512) x (1 - k)4
k = b2 / a2 = (1 - f)2
φ = latitud geodésica.
f = achatamiento.
a y b = semiejes mayor y menor del elipsoide, respectivamente.
Por lo que la fórmula de distancia en latitud entre dos latitudes geodésicas (DLat)
es:
DLat = S(φ2) - S(φ1)
(3-5)
Considerando los parámetros del elipsoide WGS 84*, y despreciando el valor de
B3 por ser muy pequeño, la fórmula (3-5) queda como sigue:
DLat (metros) = 111.132,93 x (φ2 - φ1) - 16.037,53 x (Sen (2 x φ2) - Sen (2 x φ1)) +
16,64 x (Sen (4 x φ2) - Sen (4 x φ1))
Donde:
φ1 y φ2 = latitudes geodésicas a considerar.
* Parámetros del elipsoide WGS 84:
Semieje mayor (a) = 6.378,137 Km.
Achatamiento (f) = 1/298,25722
Estos parámetros son los que se utilizaran en los distintos ejemplos presentes en este capítulo.
42
Ejemplos
Para los resultados obtenidos en los ejemplos 1, 2 y 3, se utilizaron las fórmulas
(3-2) y (3-5).
Además para las figuras de los ejemplos se tiene:
Vgc = vertical geocéntrica que le corresponde a la latitud geocéntrica.
Vgd = vertical geodésica que le corresponde a la latitud geodésica.
Ejemplo 1:
Meridian
o Celeste
1,6´
2,0´
Vgc = 84º 58,0´
Vgd = 86º 0,0´
Vgc = 86º 0,0´
Vgd= 85º 0,0´
Vgc = 85º 0,0´
Vgc = 85º 58,4´
Circunfe
rencia d
e Refere
ncia
Elipse
60,306 Millas Náuticas
2,0´
1,6´
Figura 3.f.
Distancia en latitud (85º - 86º).
43
Ejemplo 2:
1,6´
Merid
iano
Celes
te
2,0´
Vgd= 4º 0,0´
Vgc = 4º 0,0´
Vgd = 5º 0,0´
Vgc = 5º 0,0´
Vgc = 4º 58,0´
Vgc = 3º 58,4´
Circu
nfere
ncia d
e
59,709 Millas Náuticas
Elips
e
1,6´
Refer
encia
2,0´
Figura 3.g, distancia en latitud (4º - 5º).
Ejemplo 3:
Merid
iano
Celes
te
11,5´
11,5´
Vgd= 44º 30,0´
Vgc = 44º 30,0´
Vgd = 45º 30,0´
Vgc = 45º 30,0´
Vgc = 45º 18,5´
Vgc = 44º 18,5´
Elip
se
60,006 Millas Náuticas
11,5´
11,5´
Figura 3.h, distancia en latitud (44,5º - 45,5º).
44
3.2.2 Apartamiento
El apartamiento (Ap) de se define como longitud del arco de paralelo terrestre
comprendido entre dos meridianos (figura 3.i), expresada en millas u otra medida
itineraria.
Esfera de Referencia
Elipsoide
Pe
Ap
b
c
φ
a
dg
Qe
Figura 3.i.
Apartamiento en el elipsoide.
El apartamiento (Ap) se puede obtener con la siguiente fórmula:
Ap = (π / 180º) x dg x a / (1 + k x Tg2 φ)1/2
(3-6)
Donde:
k = b2 / a2 = (1 - f)2
φ = latitud geodésica.
dg = diferencia de longitudes para el Ap a considerar en grados.
f = achatamiento.
a y b = semiejes mayor y menor del elipsoide, respectivamente.
En el Anexo D se puede apreciar la obtención matemática de la fórmula (3-6).
45
A continuación se anexan las tablas Nº 7 de Bowditch, en las cuales se pueden
apreciar las distintas distancias de un grado de latitud y longitud (estas distancias se
pueden obtener con las fórmulas (3-5) y (3-6)).
46
Hay que tener presente que los distintos valores que aparecen en estas tablas se
obtuvieron con los parámetros del elipsoide WGS 72.
47
3.2.3 Paralaje de altura (Luna)
Punto de vista de una Tierra esférica
El mostrar este caso, es solo para fines de comparación.
Paralaje
Paralaje es un desplazamiento aparente de un objeto debido a un cambio de
posición del observador. Al mirar el dedo pulgar con el brazo extendido y cerrar
alternativamente un ojo y después el otro, el dedo parece desplazarse con respecto al
fondo. La cantidad de paralaje será igual al ángulo subtendido en el dedo entre las
líneas que lo unen con los dos ojos.
Los paralajes del Sol, la Luna y los cuerpos más cercanos de nuestro sistema
planetario, están basados en un desplazamiento aparente de estos astros entre dos
observadores, que están separados por una distancia igual al radio de la Tierra. Para
más claridad, el paralaje de uno de estos astros, es el ángulo subtendido por el radio
terrestre del observador. De aquí que el ángulo de paralaje varía con la distancia a la
Tierra. Es mayor cuando está más cercano. El paralaje medio del Sol es 8,8´´ y el de la
Luna 58,8´. Las estrellas están a distancias tan grandes que el radio de la Tierra no
daría suficiente paralaje para ser medido. El paralaje de los astros que componen el
sistema solar, cuando se considera en relación con la altura del astro se llama “Paralaje
de altura”. El paralaje a altura cero es el mayor, y se llama “Paralaje horizontal”. Cuando
la altura es de 90° el paralaje es “cero”.
En la figura 3.j se tiene L (la Luna), su altura sobre el horizonte aparente (Aap) es
el ángulo LOh y su altura sobre el horizonte verdadero (Av) es el ángulo LCH, que a la
vez es igual al ángulo LBh por ser correspondiente. El ángulo OLC es el paralaje (P). En
todos los casos el paralaje tiene signo positivo.
48
Figura 3.j.
Paralaje Tierra esférica (Luna).
A continuación se muestra la fórmula general de paralaje de altura de una Tierra
esférica (Pa):
Pa = Ph x Cos Aap
(3-7)
Donde:
Ph = paralaje horizontal = arc Sen (RTR / DTC)
RTR = radio Tierra esférica de referencia.
DTC = distancia Tierra-cuerpo celeste.
Aap = altura aparente.
Punto de vista de una Tierra elipsoidal
Para la Luna, el paralaje de altura de una Tierra elipsoidal, difiere en una
pequeña cantidad del de una Tierra esférica, esta pequeña diferencia solo es notoria
para ésta, por su cercanía con la Tierra.
A continuación se determinara una fórmula con la cual se puede obtener este
paralaje, y por consiguiente, la pequeña diferencia.
En la siguiente figura (figura 3.k) se pueden apreciar las distintas variables que
intervienen en el análisis.
49
Zgc
Zgd
r
ado
v
r
e
Obs
del
e
t
s
Cele
o
n
a
idi
Mer
Vertical Geodésica
Vertical Geocéntrica
Luna
´
Pa
Circunferencia de Referencia
DTL
Horizonte Sencible
Aap
Elipse
°
90
Qe
a
Av
Pe
φ
R
θ
b
RTR
Horizonte Verdadero
c´
c
Figura 3.k, paralaje Tierra elipsoidal (Luna).
Con:
Pa´ = paralaje de altura de una Tierra elipsoidal.
R = radio elipsoidal que le corresponde a la latitud geodésica.
θ = diferencia entre las verticales geodésica y geocéntrica, que le corresponde a la
latitud geodésica.
φ = latitud geodésica.
Aap = altura aparente.
DTL = distancia Tierra-Luna.
RTR = radio Tierra esférica de referencia.
50
De la figura 3.k se deduce que aplicando el teorema del seno se puede obtener
la fórmula exacta de Pa´, para la Luna ubicada en el meridiano (Pa´(±θ)), la cual es:
Pa´(±θ) = arc Sen ((R / DTL) x Cos (Aap ± θ))
Donde:
R = a / (Sen2 ψ x (1 / k - 1) + 1)1/2
ψ = arcTg (k x Tg φ)
k = b2 / a2 = (1 - f)2
f = achatamiento.
a y b = semiejes mayor y menor del elipsoide, respectivamente.
θ = φ - arcTg (k x Tg φ)
(+θ) Luna hacia el polo depreso, Aap de 0º a 90º - θ.
(-θ) Luna hacia el polo elevado.
En el Anexo D se puede apreciar la obtención matemática de la fórmula de
R.
A continuación se determinara una fórmula de Pa´, para la Luna ubicada en
cualquier azimut verdadero.
El siguiente gráfico (gráfico 3.a) muestra las variaciones de Pa´, que sufre al
variar el azimut verdadero (Azv) de 0º a 360º, partiendo de un Pa´(+θ) = 21,16´
(Aap constante = 68º, φ = 40º Sur, DTL = 384.400 Km., y el elipsoide WGS 84).
Cabe agregar que las variaciones de Pa´ que sufre al variar el Azv de 0º a 180º,
por simetría, son las mismas que las de 360º a 180º.
51
Variaciones de Pa´ (´)
21,51
21,46
21,41
21,36
21,31
21,26
21,21
21,16
0
45
90
135
180
225
270
315
360
Azv (º)
Gráfico 3.a.
Estas variaciones de Pa´ en Azv se obtuvieron con un programa computacional
(Autocad), en el cual se consideraron las distintas distancias a escala.
A continuación se muestra una fórmula que cumple con precisión, con el
comportamiento de las variaciones de Pa´ en Azv, la cual es:
Pa´ = 21,51´ + (21,16´ - 21,51´) x (1 + Cos Azv) / 2
(3-8)
Nota: La línea de tendencia del gráfico 3.a es similar para cualquier condición de
Pa´ (Luna), por lo que la forma de la fórmula (3-8) se puede utilizar en forma general.
En resumen, la fórmula general de paralaje de altura de una Tierra elipsoidal
(Pa´), para la Luna es:
Pa´ = arc Sen ((R / DTL) x Cos (Aap + θ)) + [arc Sen ((R / DTL) x Cos (Aap - θ)) arc Sen ((R / DTL) x Cos (Aap + θ))] x (1 + Cos Azv) / 2
(3-9)
(+φ) latitudes Norte.
(-φ) latitudes Sur.
La fórmula (3-9) se puede aplicar para obtener el paralaje de altura, en un marco
de referencia de precisión, a cualquier satélite artificial, cuya distancia con el centro de
la Tierra sea superior a 20.000 kilómetros.
52
Para obtener la altura verdadera de la Luna, en los cálculos de navegación, se
considera el paralaje de altura de una Tierra esférica, por lo simple de su expresión, ya
que la diferencia con el paralaje de altura de una Tierra elipsoidal es muy pequeña, por
lo que se desprecia. En el caso que se quiera considerar esta pequeña diferencia (ΔPa),
se obtendría la "verdadera" altura verdadera de la Luna, esto se traduciría en afinar la
posición alrededor de 400 metros como máximo.
Con la siguiente fórmula se puede obtener ΔPa, la cual resulta simplemente, Pa´
(fórmula (3-9)), menos Pa (fórmula (3-7)):
ΔPa = Pa´ - Pa
(3-10)
Este ΔPa se sumaria con su signo, a las distintas correcciones que se consideran
para determinar la altura verdadera de la Luna.
El valor máximo que puede alcanzar ΔPa es alrededor de 0,2 minutos de arco.
Ejemplo de cálculo de ΔPa:
Latitud = 40º Sur.
Aap = 68º
Azv = 45º
R = 6.369 Km.
θ = -0,1894º
Ph = 57´
RTR = 6.371 Km.
DTL = 384.261 Km.
ΔPa = Pa´ - Pa
ΔPa = 0,3537º - 0,3559º
ΔPa = -0,0022º
Para un Ph de 54´ y de 61,5´, los valores de ΔPa son de -0,0020º y de -0,0023º,
respectivamente.
53
A continuación se anexa un recorte del almanaque náutico del año 2006, emitido
por la armada de Chile, en el cual hacen referencia a esta pequeña diferencia, en la
página Nº 267.
Recorte 3.a.
La fórmula del recorte 3.a nos da una “aproximación” de ΔPa, además, para que
el signo y el valor de OB cumplan como corrección, hay que considerar a la latitud
estimada (Le) positiva, si es Norte, y Le negativa, si es Sur.
3.2.4 Otros Casos
Los siguientes casos son otra aplicación de tomar al elipsoide como referencia,
pero no tienen relevancia en navegación, son solo casos de apreciación.
Triángulo de Posición
La intersección, sobre la esfera celeste, del meridiano celeste superior del
observador, el círculo horario del astro, y el círculo vertical del astro define un triángulo
esférico cuyos vértices son el polo celeste elevado, el zenit y el astro, este es el
triángulo de posición, más precisamente, el triángulo de posición es su proyección
sobre la superficie de la Tierra, con el polo terrestre, el observador y la proyección del
astro como vértices. Sin embargo, como se podría pensar la proyección de este
triángulo esférico sobre la superficie de la Tierra genera dos triángulos de posición, uno
respecto a las coordenadas celestes y otro respecto a las coordenadas geográficas.
Esto resulta ya que las coordenadas celestes consideran como un mismo origen, el
centro de masas de la Tierra, y las coordenadas geográficas un origen distinto para
cada latitud.
54
A continuación se muestra un ejemplo de esto, figura 3.l, la cual es una imagen
referenciada al datum WGS 84, en la cual se aprecia la parte de interés de los
triángulos, para unas determinadas latitudes.
Figura 3.l.
Triángulos de posición a escala.
Con:
PG Astro y PG Zenit = proyecciones geodésicas del astro y del zenit, a las que les
corresponden unas latitudes geodésicas iguales a la declinación del astro (φPGA) y a la
latitud del observador (φPGZ), respectivamente.
Astro y Zenit = proyecciones geocéntricas del astro y del zenit, a las que les
corresponden unas latitudes geocéntricas iguales a la declinación del astro (ψA) y a la
latitud del observador (ψZ), respectivamente, pero con latitudes geodésicas iguales a φA
y a φZ, respectivamente.
55
De lo anterior se tiene que φPGA = ψA y que φPGZ = ψZ, el signo igual indica un
mismo ángulo respecto del ecuador, pero separados uno del otro una cierta distancia
Dv (punto 3.1).
Las latitudes geodésicas φA y φZ se pueden obtener con la siguiente fórmula,
deducida de la fórmula (3-1):
φ = arcTg (Tg ψ / k)
(3-11)
Donde:
k = b2 / a2 = (1 - f)2
ψ = latitud geodésica = latitud geocéntrica.
f = achatamiento.
a y b = semiejes mayor y menor del elipsoide, respectivamente.
Lo anterior se puede aplicar para determinar cualquier latitud geodésica que le
corresponde al triángulo esférico.
Además se deduce que la línea ortodrómica entre dos puntos del elipsoide,
independientemente de su proyección cartográfica, es una línea levemente curvada
hacia el ecuador.
Los análisis anteriores son un ejemplo claro de porque los sistemas de
posicionamiento consideran como referencia para la Tierra al datum y no a una esfera.
En el polo no se produce esta diferencia entre los triángulos, ya que ambas
coordenadas coinciden, tanto en el polo como en el ecuador.
Antípodas Elipsoide
El antípoda o las antípodas (del griego anti- "opuesto" y pous "pie") es el lugar de
la superficie terrestre diametralmente opuesto a otro o, dicho de otra forma, es el lugar
de la superficie terrestre más lejano de otro. Según la RAE (Real Academia Española),
la antípoda es cualquier habitante del globo terrestre con respecto a otro que more en
lugar diametralmente opuesto.
56
Este es un ejemplo claro de la aplicación de los análisis del punto 3.1, en el cual
parece muy simple desde el punto de vista de considerar a la Tierra como una esfera,
pero no así del punto de vista del elipsoide, como referencia la diferencia máxima entre
ambas consideraciones es alrededor de 42 kilómetros, algo no menor, a continuación
se mostrará un análisis “simpático” a fondo para este caso, ver figura 3.m.
Además, para todos los análisis se tratara para la antípoda solo la latitud, ya que
la longitud de una esfera y de un elipsoide son los mismos (meridiano que dista 180º).
Meridiano Celeste
Circunferencia de Referencia
Elipse
Pe
Caso 2
b
ψ2
φ2
Qe
φ
c
a
Qe´
ψ
ca
lL
ug
ar
Caso 3
Ve
r ti
Pe´
Caso 1
Figura 3.m, antípodas elipsoide.
Primer Caso
Para este caso es la latitud antípoda de una esfera, en el cual ψ2 es igual a ψ,
con ψ2 con signo contrario.
57
Segundo Caso
Para este caso es la latitud antípoda de una esfera, con su correspondiente al
elipsoide con φ2 igual a ψ, con φ2 con signo contrario, en este caso φ2 esta a cierta
distancia hacia el ecuador de ψ2, esta cierta distancia se puede determinar con la
fórmula (3-3).
Tercer Caso
Para este caso es lo que verdaderamente ocurre, con un valor de latitud antípoda
igual a φ3, figura 3.n.
Meridiano Celeste
θ4
Vertical Antípoda
θ3
Circunferencia de Referencia
Elipse
Pe
b
R
θ2
ψ3
φ3
Qe
c
φ
ψ3
R
Caso 3
Pe´
θ1
Vertical Lugar
Figura 3.n.
Antípodas elipsoide.
a
Qe´
58
A continuación se muestra la fórmula de latitud antípoda (φ3), la cual se deduce
de la figura 3.n, la cual es como sigue:
φ3 = arcTg (Tg (ψ3 + θ2) / k)
Donde:
ψ3 = arcTg (k x Tg φ)
θ2 ≈ 2 x θ1, por ser ángulos muy pequeños*.
θ1 = φ - arcTg (k x Tg φ)
k = b2 / a2 = (1 - f)2
φ = latitud geodésica (lugar).
f = achatamiento.
a y b = semiejes mayor y menor del elipsoide, respectivamente.
Note que la fórmula de φ3 considera lo mismo que la fórmula (3-11).
Reemplazando las distintas igualdades y resolviendo en φ3, se obtiene:
φ3 = arcTg (Tg (2 x φ - arcTg (k x Tg φ)) / k)
(3-12)
Note que θ4 esta dado implícitamente en la fórmula de φ3.
También se puede saber el ángulo entre la proyección de la vertical de φ, que
forma con la vertical de φ3, el cual es igual a θ3 + θ4, con:
θ3 ≈ θ1, por ser ángulos muy pequeños*.
θ4 = φ3 - (ψ3 + θ2)
Reemplazando las distintas igualdades y resolviendo, se obtiene:
(θ3 + θ4) = φ3 - φ = arcTg (Tg (2 x φ - arcTg (k x Tg φ)) / k) - φ
(3-13)
* Como el valor máximo de θ1 es menor que 0,2º, las aproximaciones de θ2 y θ3 difieren en
-0,000005º como máximo, respecto de los valores verdaderos. Esto se traduce en diferencias
menores a 1 metro para el valor de latitud antípoda (φ3) en la superficie del elipsoide.
59
A continuación, a modo de ejemplo, se muestra la antípoda para Valdivia.
Coordenadas geodésicas aproximadas para Valdivia (lugar):
Latitud = 40º S
Longitud = 73º W
Cuadro resumen 3.a.
Latitud
Longitud
Lugar
40º S
73º W
Antípoda Esfera
40º N
107º E
Antípoda Elipsoide
40º 22,75´ N
107º E
Además el ángulo entre la proyección de la vertical del lugar que forma con la
vertical antípoda es igual a 22,75´.
Los valores obtenidos se pueden interpretar de la siguiente forma. Si dejáramos
caer una esfera metálica en Valdivia (Lat. = 40º S, Long. = 73º W), y ésta atravesara a
la Tierra en línea recta, saldría en una latitud de 40º 22,75´ N y en una longitud de 107º
E, con un ángulo de 22,75´ hacia el ecuador, respecto al zenit de la latitud de salida,
aproximadamente.
Lo anterior se podría afinar levemente, considerando la desviación de la vertical,
y la desviación sobre el meridiano, para las posiciones geodésicas a considerar (lugar y
antípoda), con lo que se obtendrían los valores exactos.
60
Capítulo IV
Sistema Geodésico Mundial de 1984 (WGS 84)
4.1 Sistema de Coordenadas WGS 84
El sistema de coordenadas WGS 84 es un sistema convencional de referencia
terrestre, CTRS (Conventional Terrestrial Reference System). La definición de este
sistema de coordenadas sigue un criterio según el servicio internacional de rotación de
la Tierra, IERS (Internacional Earth Rotation Service).
El criterio de la IERS es:
1) Sistema geocéntrico, el centro de masas está definido para toda la Tierra,
incluido los océanos y la atmósfera.
2) Su escala, es el marco local de la Tierra, en el significado de una teoría relativista
de gravitación.
3) Su orientación se dio inicialmente por el BIH (Bureau International de l’Heure),
orientación de 1984.
4) Su evolución en el tiempo, en la orientación, no creará ninguna rotación global
residual con la corteza terrestre estimada.
El WGS 84 es un sistema de coordenadas ortogonal, con la Tierra fija, y
gráficamente, es como sigue:
61
IERS Reference Pole (IRP)
Z WGS 84
IERS Reference
Meridian (IRM)
Centro de Masas
de la Tierra
b
a
X WGS 84
Y WGS 84
Figura 4.a.
Sistema de coordenadas del WGS 84.
El origen de los ejes de la figura 4.a se define como sigue:
Origen:
Centro de masas de la Tierra.
Eje Z:
Toma la dirección del IRP (IERS Reference Pole), esta dirección corresponde a
la dirección del BIH CTP (Conventional Terrestrial Pole), época de 1984, con una
incertidumbre de 0,005´´.
Eje X:
Intercepción del IRM (IERS Reference Meridian) y un plano a través del origen y
normal al eje Z, el IRM coincide con el BIH Zero Meridian, época de 1984, con una
incertidumbre de 0,005´´.
Eje Y:
Sistema de coordenadas ortogonal con la Tierra centrada y fija.
62
El sistema de coordenadas WGS 84 también sirve como centro geométrico del
elipsoide WGS 84, y el eje Z sirve como eje de rotación de este elipsoide de revolución.
Se debe notar que la definición del WGS 84 CTRS no ha cambiado de manera
fundamental, continúa siendo definido como ortogonal y sistema de coordenadas
Tierra-fija que se intenta sea coincidente en todo lo posible con el CTRS definido por el
IERS, o previo a 1988, su predecesor, el BIH.
Actualmente se están considerando los cambios temporales en la corteza
terrestre, estos son modelados o estimados, los cambios más importantes son del
movimiento de las placas tectónicas y los efectos de las mareas terrestres, entre otros.
Además para estos cambios, es necesario designar la época del marco de
referencia, por ejemplo el marco de referencia del WGS 84 (G730) es 1994, mientras la
época asociada al marco de referencia WGS 84 (G873) es 1997.
4.2 Elipsoide WGS 84
Las aplicaciones geodesias globales requieren tres superficies diferentes para
quedar claramente definidas, la primera es la superficie topográfica de la Tierra, esta
superficie incluye la familiar superficie terrestre y la topografía del fondo de los océanos.
Debido a la elevada irregularidad de la topografía de la Tierra, esta definición necesita
una superficie de referencia geométrica o matemática, el elipsoide y una superficie
equipotencial llamada geoide.
En cuanto al elipsoide y los parámetros que lo definen, el comité original
desarrollador del WGS 84 decidió tomar el acercamiento usado por la IUGG
(International Union of Geodesy and Geophysics) cuando estableció y adopto el sistema
de referencia geodésico de 1980 (GRS 80), de acuerdo con un elipsoide geocéntrico de
revolución, se tomó esto para el elipsoide WGS 84.
En cuanto a los parámetros, los seleccionados originalmente que definían al
elipsoide WGS 84 eran: el semieje mayor (a), la constante gravitacional de la Tierra
(GM), el coeficiente normalizado gravitatorio (Ĉ2.0)*, y la velocidad angular de la Tierra
(ω).
* El (Ĉ2.0) también se conoce como harmónico zonal de segundo grado y se determina en base
al modelo dinámico de la Tierra (geoide).
63
Estos parámetros eran idénticos a los del elipsoide GRS 80, con una excepción
menor, la fórmula usada para el coeficiente normalizado gravitatorio es original del
WGS 84, en lugar del “J2” usado por el elipsoide GRS 80.
En 1993, dos factores fueron considerados para el afinamiento de la definición de
los parámetros originales, el primer afinamiento fue recomendado por la DMA, (Defense
Mapping Agency) basado en evidencia empírica. El valor de afinamiento estaba dado
por el parámetro GM. En 1994, este parámetro mejorado GM fue recomendado para
usarse en las elevadas exactitudes requeridas por el DoD (Department of Defense,
USA) para aplicarlas en determinaciones orbitales.
El segundo afinamiento ocurrió cuando el proyecto de Earth Gravitational Model
1996
(EGM96)
de
la
unión
NIMA/NASA
(National
Imagery
and
Mapping
Agency/National Aeronautics and Space Administration) produjo un nuevo valor
estimado para el coeficiente normalizado gravitatorio (Ĉ2.0).
Estas modificaciones tenían que realizarse al WGS 84, con lo que los valores de
los parámetros originales cambiarían, por lo que se tomó la decisión de retener el
semieje mayor y el valor de achatamiento (a = 6.378.137,0 m y f = 1/298,257223563)
del original elipsoide WGS 84, lo que llevó a que los cuatro parámetros pasarían a ser el
(a), (f), (ω) y (GM).
Se debe notar que el valor refinado de GM esta dentro del valor original del GM
del año 1987.
Respecto ha (Ĉ2.0), se debe notar que hay dos valores distintos para este
término, uno dinámico derivado del EGM96, y otro geométrico.
A continuación se definen los 4 parámetros:
4.2.1 Semieje Mayor (a)
El semieje mayor (a) es uno de los parámetros definidos para el WGS 84 y su
valor adoptado es:
a = 6.378.137,0 metros
Este valor es el mismo que el valor del elipsoide GRS 80.
(4-1)
64
El semieje mayor del WGS 84 está basado en estimaciones del periodo de
tiempo de 1976-1979, determinado usando técnicas laser, Doppler y datos de altímetria
de radar, aunque recientemente hay estimaciones mejoradas para este parámetro,
estas nuevas estimaciones difieren del valor anterior por solo unos decímetros
(54 centímetros).
Lo importante, es el gran numero de aplicaciones prácticas de este elipsoide,
como en los receptores GPS y en los procesos de cartografiado, que usan a este
elipsoide como una superficie conveniente de referencia.
Al contrario, no se consideró al geoide por el sentido común, ya que se tendrían
que hacer numerosas modificaciones al software de los receptores GPS y a los
procesos de cartografiado, por esto se tomó la decisión para retener el elipsoide de
referencia original.
Es más, al considerar al elipsoide se descarta la necesidad de transformar o
recalcular las coordenadas del gran número de datos geoespaciales exactos que han
sido reunidos y transformados al elipsoide WGS 84 en la última década.
De esto se desprende que las aplicaciones especializadas y experimentos que
requieren el mejor ajuste de los parámetros del elipsoide pueden manejarse
separadamente, fuera de la línea central de toda la generación de información
geoespacial del DoD.
4.2.2 Achatamiento (f)
El achatamiento (f) es ahora unos de los parámetros actuales del WGS 84, este
valor adoptado es:
f = 1/298,257223563
(4-2)
Para el desarrollo del original WGS 84 se usó el coeficiente normalizado
gravitatorio dinámico (Ĉ2.0), este valor es un parámetro definido. En este caso, el valor
de achatamiento del elipsoide fue derivado del (Ĉ2.0). Se aceptó a través de una
expresión rigurosa, además esto derivó un achatamiento ligeramente diferente al
achatamiento del GRS 80, aunque esta diferencia no tiene ninguna consecuencia
práctica.
65
4.2.3 Velocidad Angular de la Tierra (ω)
El valor usado de ω es uno de los parámetros que definen al WGS 84 y al GRS
80, y es:
ω = 7.292.115 x 10-11 radianes/segundos
(4-3)
Este valor representa una rotación estándar para la Tierra con una velocidad
angular constante, se debe notar que la velocidad angular actual de la Tierra fluctúa con
el tiempo.
Aunque ω es conveniente para el uso estándar de la Tierra y del elipsoide WGS
84, la IAU (International Astronomical Union) y el GRS 67 (Geodetic Reference System
1967), dan su versión de este valor (ω´):
ω´= 7.292.115,1467 x 10-11 radianes/segundos
(4-4)
Este valor (ω´) junto con una variable en la que se considera el tiempo (m), se
utilizan para la velocidad angular en un marco de referencia de precisión (ω*), y esta es
como sigue:
ω* = ω´+ m
(4-5)
Donde:
m = (7,086 x 10-12 + 4,3 x 10-15 Tu) radianes/segundos
Tu = siglos Julianos de la época J2000,0
Tu = du / 36.525
du = El número de días de tiempo universal (UT) de la fecha Juliana (JD) 2.451.545,0
UT1, tomando los valores de ± 0,5, ± 1,5, ± 2,5...
du = JD - 2.451.545
Por consiguiente, la velocidad angular de la Tierra en un marco de referencia de
precisión para aplicaciones satelitales, se da por:
ω* = (7.292.115,8553 x 10-11 + 4,3 x 10-15 Tu) radianes/segundos
(4-6)
66
4.2.4 Constante Gravitacional de la Tierra (GM)
Constante Gravitacional de la Tierra (GM), (Tierra y Atmósfera Incluida)
El término central en el campo gravitatorio de la Tierra es GM, es conocido con
una exactitud mayor que la constante gravitatoria universal “G”, o la masa de la Tierra
“M”.
La mejora significante en el conocimiento del GM ha ocurrido subsecuentemente
al desarrollo del original WGS 84. El valor refinado del parámetro WGS 84 de GM, junto
con la incertidumbre es:
GM = (3.986.004,418 ± 0,008) x 108 m3/s2
(4-7)
Este valor se recomienda en las convenciones de la IERS (1996) y también es
recomendado por la IAG (International Association of Geodesy).
Especiales consideraciones para los GPS
Basado en una recomendación del DMA (Defense Mapping Agency) a la fuerza
aérea de los estados unidos, el valor refinado del WGS 84 GM (3.986.004,418
x
108
m3/s2) se implemento en el GPS en el OSC (Operational Control Segment) durante el
otoño de 1994, esta mejora quitó 1,3 metros de error radial a las estimaciones orbitales
del OCS.
GM de la Atmósfera
Para algunas aplicaciones es necesario que el valor GM para la Tierra no incluya
la masa de la atmósfera o que se precise un valor de GM para la atmósfera. Para lograr
esto, es necesario saber la masa de la Tierra y la masa de la atmósfera, y la constante
gravitatoria universal G.
Usando el valor recomendado para G por la IAG, y el valor aceptado para la
masa de la atmósfera, la estimación que se adoptó para el valor GM de la atmósfera
(GMA) para su uso con el WGS 84 es:
GMA = (3,5 ± 0,1) x 108 m3/s2
(4-8)
67
GM con la Atmósfera de la Tierra Excluida (GM´)
La constante gravitatoria de la Tierra con la masa de la atmósfera excluida
(GM´), puede obtenerse substrayendo simplemente GMA, ecuación (4-8), de GM,
ecuación (4-7), quedando:
GM´ = (3.986.000,9 ± 0,1) x 108 m3/s2
(4-9)
Note que GM´ es conocido con menos exactitud que GM, debido a la
incertidumbre introducida por GMA.
Cuadros Resumen:
Tabla 1.
Los 4 parámetros definidos del WGS 84.
Parámetro
Semieje Mayor
Achatamiento
Velocidad Angular de la Tierra
Constante Gravitacional de la Tierra
(Tierra y Atmósfera Incluida)
Notación
a
f
ω
GM
Valor
6.378.137,0 metros
1/298,257223563
7.292.115,0 x 10-11 rad/s
3.986.004,418 x 108 m3/s2
Tabla 2.
Valores de los parámetros del WGS 84 para aplicaciones especiales.
Parámetro
Constante Gravitacional
(Atmósfera Excluida)
GM de la Atmósfera
Velocidad Angular de la Tierra (En un
Notación
GM´
GMA
ω*
Marco de Referencia de Precisión)
Valor
Exactitud
8
3
3.986.000,9 x 10 m /s
2
± 0,1 x 108 m3/s2
3,5 x 108 m3/s2
± 0,1 x 108 m3/s2
(7.292.115,8553 x 10-11 +
± 0,15 x 10-11
4,3 x 10-15 TU) rad/s
rad/s
4.2.5 Constantes Geométricas y Físicas
Hay muchas constantes asociadas al elipsoide WGS 84, aparte de los cuatro
parámetros definidos anteriormente (tablas 1 y 2) que se necesitan para algunas
aplicaciones geodésicas.
Utilizando los cuatro parámetros definidos, es posible derivar unas constantes
geométricas y físicas.
68
Las constantes más usadas, asociadas con el elipsoide WGS 84, se encuentran
en las tablas 3 y 4.
Estas constantes derivadas deben contener un gran número de dígitos, con tal
que la consistencia entre los niveles de precisión de los parámetros se mantenga.
Constantes Geométricas
El coeficiente normalizado gravitacional geométrico (Ĉ2.0) se deriva a través del
set de parámetros definidos (a, f, ω y GM). La nueva constante geométrica derivada
es igual a -0,484166774985
x
10-3, el cual difiere del original WGS 84 (Ĉ2.0) en
7,5015 x 10-11. Esta diferencia está dentro de la precisión del original WGS 84 (Ĉ2.0), que
es de ± 1,30 x 10-9.
Tabla 3.
Constantes geométricas derivadas del elipsoide WGS 84.
Constante
Notación
Valor
Harmónico Zonal de Segundo Grado
Semieje Menor
Primera Excentricidad
Primera Excentricidad al Cuadrado
Segunda Excentricidad
Segunda Excentricidad al Cuadrado
Excentricidad Linear
Curvatura del Radio Polar
Relación de Ejes
Radio Medio de los Semiejes
Radio de una Esfera de Igual Área
Radio de una Esfera de Igual Volumen
Ĉ2.0
b
e
e2
e´
e´2
E
c
b/a
R1
R2
R3
-0,484166774985 x 10-3
6.356.752,3142 m
8,1819190842622 x 10-2
6,69437999014 x 10-3
8,2094437949696 x 10-2
6,73949674228 x 10-3
5,2185400842339 x 105
6.399.593,6258 m
0,996647189335
6.371.008,7714 m
6.371.007,1809 m
6.371.000,7900 m
Tabla 4.
Constates físicas derivadas.
Constante
Potencial de Gravedad Teórico del Elipsoide
Gravedad Teórica en el Ecuador del Elipsoide
Gravedad Teórica en el Polo del Elipsoide
Valor Medio Teórico de Gravedad
Constante de Gravedad Teórica
Masa de la Tierra (Atmósfera Incluida)
m = ω2xa2xb/GM
Notación
U0
Valor
62.636.851,7146 m2/s2
γe
γp
9,7803253359 m/s2
γm
k
M
m
9,8321849378 m/s2
9,7976432222 m/s2
0,00193185265241
5,9733328 x 1024 kg
0,00344978650684
69
Constantes físicas
Otras 2 constantes son una parte íntegra de la definición del WGS 84, estas
constantes son la velocidad de la luz (c) y la elipticidad dinámica (H).
Actualmente el valor aceptado de la velocidad de la luz en el vacío (c) es de:
c = 299.792.458 m/s
(4-10)
Este valor es reconocido oficialmente por la IAG y la IAU y se ha adoptado para
su uso con el WGS 84.
La elipticidad dinámica (H) es necesaria para determinar los momentos
principales de inercia de la Tierra, A, B y C. en la literatura hay varias referencias a la
elipticidad dinámica, como elipticidad mecánica o constante de precesión, este factor es
el valor teórico del cambio de precesión de los equinoccios, el cual es bien sabido por
observaciones en 1983 en un reporte de las constantes fundamentales geodésicas de
la IAG.
El siguiente valor de H se da para la determinar el momento de inercia:
(4-11)
H = 1/305,4413 ± 0,0005
Este valor ha sido adoptado para usarse en el WGS 84.
Los valores de la velocidad de la luz en el vacío y la elipticidad dinámica
adoptadas para usarse con el WGS 84 se muestran en la tabla 5, con otras constantes
asociadas al WGS 84, usadas en aplicaciones especiales.
Tabla 5
Diversas constantes relevantes
Constante
Velocidad de la Luz en el Vacío
Elipticidad Dinámica
Constante Universal de Gravitación
Momentos Principales de Inercia de la Tierra
(Solución Dinámica)
Notación
c
H
G
A
B
C
Valor
299.792.458 m/s
1/305,4413
6,673 x 10-11 m3/kgxs2
8,0091029 x 1037 kgxm2
8,0092559 x 1037 kgxm2
8,0354872 x 1037 kgxm2
70
4.3 Gravedad Elipsoidal en el WGS 84
El elipsoide WGS 84 es identificado como un elipsoide de revolución geocéntrico
equipotencial. Un elipsoide equipotencial es simplemente un elipsoide definido por una
superficie equipotencial, en esta superficie el valor del potencial de gravedad es el
mismo, pero no así la gravedad, la cual se deriva del potencial de gravedad.
Según la fórmula de Somigliana, la gravedad teórica (γ) en cualquier punto el
elipsoide es:
γ = γe x (1 + k x Sen2 φ) / (1 - e2 x Sen2 φ)1/2
(4-12)
Donde:
k = ((b x γp) / (a x γe)) - 1
a y b = semiejes mayor y menor del elipsoide, respectivamente.
γe y γp = gravedad teórica en el ecuador y en los polos, respectivamente.
e2 = primera excentricidad al cuadrado del elipsoide.
φ = latitud geodésica.
El sistema MKS (metros-kilogramos-segundos) es usado para evaluar la fórmula
(4-12), con lo que las unidades de gravedad son m/s2, pero pueden ser convertidas a
miligal (abreviatura de mgal) por el factor de conversión 1 m/s2 = 105 mgal.
Cabe agregar que la forma más exacta de terminar la gravedad en la superficie
de la Tierra es utilizando instrumentos gravimétricos en el sitio de interés.
4.4 Geoide EGM96 y el WGS 84
Como se menciono previamente, para las aplicaciones geodésicas se utilizan
tres superficies primarias de referencia para la Tierra:
1) La superficie topográfica de la Tierra.
2) La superficie geométrica de la Tierra, tomando un elipsoide de revolución.
3) El geoide.
71
En la práctica común el geoide se expresa para un punto dado, por lo que se
refiere a la distancia sobre (+N) o bajo (-N) del elipsoide (figura 4.c). Por razones
prácticas, el geoide ha sido usado para servir como superficie de referencia vertical
para la altura del nivel medio del mar (NMM).
En aquellas áreas dónde los datos de elevación de nivelación convencional no
están disponibles, se aproxima a la altura del nivel medio del mar, usando alturas
ortométricas.
h=H+N
(4-13)
H=h-N
(4-14)
Donde:
h = altura geodésica (altura relativa al elipsoide).
N = ondulación geoidal.
H = altura ortométrica (altura relativa al geoide).
Alternativamente, algunos países reemplazan las alturas ortométricas con las
alturas normales y las ondulaciones del geoide con las anomalías de altura. Este uso de
anomalías de altura elimina el asumir una densidad para las masas entre el geoide y el
suelo, por consiguiente, la ecuación (4-13) puede ser reformulada por:
h = H + N = H* + ζ
(4-15)
Donde:
H* = altura normal.
ζ = anomalía de altura.
La ecuación (4-14) ilustra el uso de la ondulación geoidal en la determinación de
la altura ortométrica (H) por la altura geodésica (h), derivada usando posiciones
satelitales (GPS) localizada en la superficie física de la Tierra o a bordo un vehículo que
opera cerca de la superficie de la Tierra.
72
Ondulación Geoidal entre el WGS 84 y el EGM96
La siguiente figura (figura 4.c) muestra la ondulación geoidal entre el WGS 84 y
el EGM96 en un mapa de colores para toda la Tierra, con sus respectivas equivalencias
en metros.
Figura 4.c.
La ondulación geoidal entre el WGS 84 y el EGM96 para toda la Tierra, exhibe
las siguientes estadísticas:
Medio = -0,57 metros.
Desviación estándar = 30,56 metros.
Mínima = -106,99 metros.
Máxima = 85,39 metros.
La localización de la ondulación mínima y máxima es:
Mínima: L = 4,75º N, G = 78,75º E
Máxima: L = 8,25º S, G = 147,25º E
La desviación estándar indica la diferencia típica entre el geoide y el elipsoide de
referencia.
73
La ondulación geoidal del WGS 84 y el EGM96 posee un rango de error de ± 0,5
a ± 1,0 metros para toda la Tierra.
4.5 El WGS 84 Relacionado con otros Sistemas Geodésicos
Uno de los principales propósitos del sistema geodésico mundial de 1984
(WGS 84) es el de eliminar el uso de datums horizontales locales. Unas décadas atrás
el número de datums geodésicos locales excedía el centenar, actualmente este número
es significativamente menor y continúa disminuyendo.
Hasta que un datum geodésico global se acepte para su uso en todo el mundo,
se requieren unos medios para hacer conversiones entre los distintos datums
geodésicos.
Los datums horizontales se desarrollaron en el pasado para satisfacer la
cartografía y los requisitos de la navegación para regiones específicas de la Tierra.
En cambio para grandes extensiones geográficas, se utilizan unos determinados
datums, como el datum norteamericano de 1983 (NAD 83). En las pasadas 2 décadas,
el desarrollo de un datum geodésico global se a hecho posible, el WGS 84 y los datums
ITRF (IERS Terrestrial Reference Frame) son ejemplos de aquello.
Los datums ITRF son aquellos que utilizan el criterio IERS definido en el punto
4.1.
El acercamiento más exacto para obtener coordenadas WGS 84, es adquirir
datos de rastreo satelital del sitio de interés (GPS) y posicionarlo directamente en el
WGS 84 (cartas o mapas referenciadas al WGS 84).
Cuando no se disponga de una carta o mapa referenciado al WGS 84, una
transformación de datums puede usarse para convertir las coordenadas del sistema
local al WGS 84.
4.5.1 Relación del WGS 84 con los ITRF
El WGS 84 es consistente con los ITRF. Las diferencias entre el WGS 84 y los
ITRF son del rango del centímetro para todo el mundo. Por consiguiente, para el
propósito de las cartas y mapas, éstos se consideran iguales.
74
Un ejemplo de esto es el European Terrestrial Reference Frame de 1989
(EUREF89).
4.5.2 Relación del WGS 84 con el NAD 83
El North American Datum de 1983 (NAD 83) es un datum geocéntrico, esto se
estableció en 1986 para los Estados Unidos, Canadá, México, América central y las
islas Caribes. Hawai y Groenlandia también están conectados con este datum.
Esto es basado en un ajuste horizontal de datos de estudios convencionales y a
la inclusión de datos del tránsito satelital doppler y del VLBI (Very Long Baseline
Interferometry).
Datos de estos dos últimos son usados para orientar el marco de referencia del
NAD 83 al sistema terrestre de 1984 BIH. La orientación de los ejes coordenados del
ECEF (Earth-Centered Earth-Fixed) del marco de referencia del NAD 83 es idéntica al
marco de referencia original del WGS 84.
El NAD 83 usa el elipsoide GRS 80 (Geodetic Reference System de 1980) como
elipsoide de referencia, con el centro geométrico del elipsoide coincidente con el centro
de masas de la Tierra y como el origen del sistema de coordenadas.
El semieje mayor y achatamiento de este elipsoide son:
a = 6.378.137 metros
f = 1/298,257222101
El elipsoide WGS 84 para todos los propósitos prácticos es idéntico al elipsoide
GRS 80. Estos usan el mismo valor para el semieje mayor y tienen la misma orientación
con respecto al centro de masas de la Tierra y el mismo origen del sistema de
coordenadas. Sin embargo, el WGS 84 usa un valor derivado para el achatamiento, el
calculado por el coeficiente normalizado gravitatorio (Ĉ2.0), en cambio el valor derivado
(Ĉ2.0) del GRS 80, es por J2, de la siguiente forma:
Ĉ2.0 = -J2 / 51/2
(4-16)
El valor resultante del WGS 84 para f es 1/298,257223563. La diferencia entre el
valor de f del GRS 80 y del WGS 84, crea una diferencia de 0.1 mm en los semiejes
menores derivados de los 2 elipsoides.
75
Basado en lo anterior, las posiciones geodésicas determinadas con respecto al
NAD 83 o al WGS 84, tienen incertidumbres de 1 metro aprox.
Para el mapeado y el cartografiado en navegación, los dos sistemas son
indistinguibles en escalas de 1:5.000 o menores.
4.5.3 Transformaciones de un Datum Geodésico Local al WGS 84
Para la mayoría de las aplicaciones y operaciones del DoD que involucran a los
mapas, cartas, navegación e información geoespacial, las coordenadas WGS 84 se
obtendrán de una transformación de un datum geodésico local al WGS 84. Esta
transformación puede ser realizada en coordenadas curvilíneas geodésicas.
φWGS 84 = φLocal + Δφ
λWGS 84 = λLocal + Δλ
(4-17)
hWGS 84 = hLocal + Δh
Donde Δφ, Δλ, Δh se pueden obtener utilizando varios métodos de transformación,
entre estos el que generalmente se utiliza con el WGS 84 es la Transformación
Estándar de Molodensky, con la que se obtienen exactitudes alrededor de 8 metros, la
cual se muestra a continuación:
Δφ = {-Δx x Sen φ x Cos λ - Δy x Sen φ x Sen λ + Δz x Cos φ + Δa x (RN x e2 x Sen φ x
Cos φ) / a + Δf x [RM x (a / b) + RN x (b / a)] x Sen φ x Cos φ} x 1 / [(RM + h) x Sen 1´´]
Δλ = [-Δx x Sen λ + Δy x Cos λ] x 1 / [(RN + h) x Cos φ x Sen 1´´]
Δh = Δx x Cos φ x Cos λ + Δy x Cos φ x sin λ + Δz x Sen φ - Δa x (a / RN) + Δf x (b / a) x
RN x Sen2 φ
Donde:
φ, λ, h = coordenadas geodésicas.
Con latitud geodésica (φ) positiva con signo Norte y negativa con signo Sur, y
longitud geodésica (λ) positiva con signo Este y negativa con signo Weste.
76
h=N+H
Con altura geodésica (h) (altura relativa al elipsoide), altura geoidal (N) y altura
ortométrica (H) (altura relativa al geoide).
Δφ, Δλ, Δh = corrección para transformar las coordenadas del datum geodésico local a
los valores φ, λ, h, del WGS 84. Las unidades de Δφ y Δλ son segundos de arco (´´), y
las unidades de Δh son metros (m).
Δx, Δy, Δz = cambios entre los centros del datum geodésico local y del WGS 84,
correcciones para transformar el sistema relacionado con coordenadas rectangulares
(x, y, z) del datum geodésico local con los valores relacionados (x, y, z) del WGS 84.
a y b = semiejes mayor y menor del elipsoide del datum geodésico local,
respectivamente.
b/a=1-f
f = achatamiento del elipsoide del datum geodésico local.
Δa, Δf = diferencias entre el semieje mayor y achatamiento del elipsoide del datum
geodésico local y del elipsoide WGS 84, respectivamente (WGS 84 menos local).
e = primera excentricidad.
e2 = 2 x f - f2
RN = a / (1 - e2 x Sen2 φ)1/2
RM = a x (1 - e2) / (1 - e2 x Sen2 φ)3/2
Note que todas las cantidades Δ se generan substrayendo los valores del
elipsoide del datum geodésico local de los valores del elipsoide WGS 84.
En el Anexo C se pueden apreciar los valores Δx, Δy, Δz, que son conocidos
como parámetros de transformación, de los datums utilizados en Sudamérica.
77
Conclusiones
El conocer los distintos alcances del datum como superficie de referencia es de
gran importancia para el navegante de hoy en día, ya que continuamente lo utiliza, ya
sea en las cartas de navegación para trazar su travesía o para posicionarse, o cuando
utiliza los receptores satelitales.
El conocer que existen diferencias entre los distintos datum, y a qué se deben
estas diferencias, nos da un entendimiento más profundo del tema.
Un ejemplo de esto sería la navegación por los canales del sur de Chile, en los
cuales no es recomendable bajo ningún motivo utilizar un receptor satelital para llevar la
travesía del buque, ya que aparte de contar con las diferencias introducidas por los
factores propios de la señal de los receptores satelitales (atmósfera, rebotes de la
señal, etc.), se tendría que contar la diferencia introducida por la carta de navegación, el
cual va a depender del datum de referencia, alrededor de 300 metros como máximo.
Lo anterior es solo algo superficial, ya que si no se tuvieran diferencias por la
atmósfera, rebotes de la señal, etc., y el datum de la carta fuera el mismo del receptor
satelital, La posición obtenida sería exacta sobre una superficie de referencia
aproximada, que sería el elipsoide, que al compararla con posiciones obtenidas
astronómicamente, siempre existirán diferencias debido a la desviación de la vertical.
En cuanto al elipsoide como superficie de referencia, personalmente creo que el
mostrar las diferencias entre la Tierra esférica y la Tierra elipsoidal, nos da una
perspectiva diferente para nuestro planeta, sacando ese pensamiento de perfección
introducido por la esfera, más precisamente por la trigonometría esférica, sin
desmerecer a esta última.
Un ejemplo de esto se apreció en el caso del paralaje de altura, el cual arrojó
diferencias que se traducen en afinar la posición alrededor de 400 metros como
máximo. La verdad es que esta diferencia es algo insignificante y despreciable del
punto de vista de la navegación, pero el fin de mostrarla, como se ha mencionado
previamente, es que ésta existe.
Lo otro es que el conocer las distintas consideraciones que se tomaron para
definir al sistema WGS 84, nos da un mejor acercamiento y entendimiento de este
datum, el cual se utiliza en la mayoría de los receptores satelitales (GPS) y en las cartas
de navegación actualmente en uso.
78
Por último, creo que un gran plus de este sistema, es que esta considerando
entre otros, los movimientos de las placas tectónicas, observando desplazamientos
horizontales de hasta 7 centímetros por año.
Personalmente creo que es difícil saber a ciencia cierta si estas precisiones están
siendo traspasadas para usos civiles, por el antecedente del error introducido a la señal
de los GPS (disponibilidad selectiva) de los usuarios civiles.
79
Anexos
Anexo A: Proyecciones Cartográficas
Las proyecciones cartográficas permiten representar la superficie de la Tierra en
una lámina de papel plana. Una proyección cartográfica es una representación
sistemática de los paralelos y meridianos de una superficie tridimensional en una
superficie bidimensional. Dado que una superficie plana no puede ajustarse a la Tierra
sin estirarse o encogerse, no es posible representar sus atributos (ej. meridianos,
paralelos, límites entre países, etc.) en una carta o mapa sin causar distorsiones.
Existen diversas proyecciones y cada una de ellas trata de minimizar las
distorsiones. Por ejemplo, el cartógrafo puede diseñar una cuadrícula sobre la superficie
terrestre de tal forma que una o más de sus propiedades geométricas se mantengan o
de tal forma que las áreas de mayor distorsión se ubiquen en zonas de menor
importancia para el uso que se le dará a la carta (ej. mantener la geometría de los
continentes a expensas de la geometría de los océanos).
Las proyecciones que se utilizan en la actualidad se han derivado a partir de
modelos matemáticos en los cuales se proyecta la Tierra y todas ellas comparten la
misma característica, mostrar la posición correcta de las líneas de latitud y longitud del
planeta.
En otras palabras, cada proyección es solamente un reordenamiento de los
meridianos y paralelos trasladados del elipsoide terrestre a una carta. Dado que no hay
forma de eliminar los errores al trasladar una superficie curva (elipsoide) a una
superficie plana (carta), ninguna proyección es geométricamente perfecta.
En síntesis, cada proyección es elaborada a partir de una figura geométrica con
un propósito particular y por ende tiene sus propias virtudes y limitaciones (figura A.1).
80
Figura A.1.
Derivación de una proyección cartográfica
a partir de un cilindro, un plano y un cono.
Compromiso entre Equivalencia y Conformalidad
Para proveer una representación correcta del tamaño y forma de los objetos en
la superficie terrestre, el mapa debe mostrar la distancia y la dirección de dichos objetos
sin distorsiones. Sin embargo hasta la fecha esto no es posible y las diferentes
proyecciones enfatizan uno de los dos atributos, tamaño ó forma.
Proyecciones equivalentes
Las proyecciones de tipo equivalente se caracterizan por su capacidad de
mantener una razón constante de superficie a lo largo y ancho de la carta. En otras
palabras el tamaño de un objeto en la superficie terrestre no es afectado por su posición
en la carta.
Esta proyección es útil para mostrar la distribución de variables geográficas ya
que el tamaño de la superficie es independiente de su posición en el mapa y por lo tanto
elimina errores cuando comparamos áreas de diferentes dimensiones en diferentes
partes del planeta.
Por ejemplo, en una carta de una proyección equivalente 1 cm2 representa la
misma área en los Estados Unidos, Chile, o Siberia. Sin embargo la exactitud en
tamaño se logra a expensas de una distorsión en las formas de los objetos o superficies
(figura A.2).
81
Figura A.2.
Proyección Albers de igual área.
Proyecciones Conformales
La proyección conformal se caracteriza por mantener la forma de los objetos o
superficies que se muestran en la carta. En esta proyección las relaciones angulares no
son distorsionadas y por lo tanto los objetos o superficies mantienen en el mapa la
forma que tienen en la superficie terrestre. Las proyecciones de tipo conformal tienen
meridianos y paralelos que se cruzan en ángulo recto, tal y como sucede en la
superficie de la Tierra.
La desventaja de las proyecciones de tipo conformal es que distorsionan
fuertemente el tamaño de las superficies cartografiadas y como consecuencia la escala
no es constante entre regiones de la carta. Por ejemplo, en un mapa mundi las
superficies en altas latitudes se muestran más grandes de lo que realmente lo son. Por
ejemplo, en la proyección Mercator, Groenlandia aparece mucho más grande que
África, Australia y América del sur. Sin embargo, en realidad África es 14 veces más
grande que Groenlandia, América del sur 9 veces más grande y Australia 3,5 veces
más grande (figura A.3).
82
Figura A.3.
Proyección Mercator.
Las propiedades de equivalencia y conformalidad son mutuamente excluyentes,
excepto para cartas o mapas de gran escala (ej. áreas muy pequeñas). En la práctica
las cartas o mapas se hacen utilizando una de las dos proyecciones.
Las Proyecciones y su Clasificación
Aun cuando existen más de mil proyecciones diferentes en el mundo, la gran
mayoría pueden agruparse en unas cuantas familias basadas en su derivación (cuadro
A.1). Las proyecciones de una misma familia comparten las mismas distorsiones y
propiedades. A continuación se presentan cuatro de las familias de proyecciones más
comunes.
A. Proyecciones Cilíndricas
La proyección cilíndrica se deriva al proyectar el globo terráqueo en un papel con
forma de cilindro que es tangente o que se intercepta con dicho globo (figura A.4).
La mayoría de las proyecciones cilíndricas se derivan de tal forma que el cilindro
toque al globo en el ecuador (punto de tangencia). En un mapa rectangular los
meridianos y los paralelos se cruzan en ángulo recto y no existe distorsión en el punto
de tangencia con el globo. Las distorsiones aumentan conforme nos alejamos de dicha
83
línea. La proyección Mercator es un buen ejemplo de estas distorsiones. Las
proyecciones cilíndricas son utilizadas para mapas mundi.
Figura A.4.
Proyección Miller.
B. Proyecciones Elípticas u Ovales
Las proyecciones elípticas u ovales son representadas por un conjunto de
proyecciones con forma de balón achatado (figura A.5). Con frecuencia en estas
proyecciones un paralelo central (normalmente el ecuador) y un meridiano central
(normalmente el meridiano cero) se cruzan en ángulo recto en el centro del mapa, el
cual representa un punto de no distorsión.
Las distorsiones en estas proyecciones aumentan conforme nos acercamos al
margen de la carta. Los paralelos mantienen sus propiedades geométricas sin embargo
los meridianos son mostrados como líneas curvas (excepto en el meridiano central).
84
Figura A.5.
Proyección Mollweide.
C. Proyecciones Cónicas
En esta familia de proyecciones uno o más conos son ubicados tangentes a ó de
tal forma que intercepten una porción del globo y la cuadrícula geográfica es proyectada
en dicho cono(s) (figura A.6).
Normalmente el vértice del cono es ubicado sobre uno de los polos de tal forma
que el círculo de tangencia coincida con uno de los paralelos, el cual se convierte en el
paralelo estándar de la proyección.
Las distorsiones son mínimas en los alrededores del paralelo estándar y
aumentan conforme nos alejamos de dicho paralelo.
Por las características de la proyección, solo se puede cartografiar un semi
hemisferio o sea una cuarta parte de la Tierra.
La proyección es especialmente apropiada para cartografiar áreas pequeñas.
85
Figura A.6.
Proyección Lambert conformal cónica.
D. Proyecciones Azimutales
Las proyecciones azimutales también conocidas como planas o zenitales, son
derivadas a partir de un grid o cuadrícula geográfica del planeta, expresada como un
plano que es tangente a un punto de la Tierra (figura A.7). Teóricamente el punto de
tangencia puede ser cualquier punto en el planeta, sin embargo con frecuencia se utiliza
para tal fin el polo norte, el polo sur, o algún punto en el ecuador.
La proyección mantiene sus propiedades geométricas alrededor del punto de
tangencia y las distorsiones aumentan conforme nos alejamos de su punto de origen.
En esta proyección, solo es posible mostrar un hemisferio.
86
Figura A.7.
Proyección equidistante azimutal.
Por último se muestra un cuadro (Cuadro A.1) con las familias de proyecciones
más comunes.
Cuadro A.1.
87
Anexo B: Universo Actual de Elipsoides y Datums Utilizados en Geodesia
Universo actual de elipsoides:
Nombre del Elipsoide
Airy 1830
Australian National
Bessel 1841
Bessel 1841 (Namibia)
Clarke 1866
Clarke 1880
Delambre 1800
Everest (India 1830)
Everest (Sabah Sarawak)
Everest (Malay&Sing 1948)
Everest (India 1956)
Everest (Malaysia 1969)
Everest (Pakistán)
Modified Airy
Modified Fischer 1960
Hayford 1910 Internacional
Helmert 1906
Hough 1960
Indonesian 1974
Internacional 1924
Krassovsky 1940
GRS 80
South American 1969
Struve 1924
Walbeck 1819
WGS 72
WGS 84
a (metros)
6.377.563,396
6.378.160,000
6.377.397,155
6.377.483,865
6.378.206,400
6.378.249,145
6.375.635,000
6.377.276,345
6.377.298,556
6.377.304,063
6.377.301,243
6.377.295,664
6.377.309,613
6.377.340,189
6.378.155,000
6.378.388,000
6.378.200,000
6.378.270,000
6.378.160,000
6.378.388,000
6.378.245,000
6.378.137,000
6.378.160,000
6.378.298,300
6.376.896,000
6.378.135,000
6.378.137,000
1/f
299,32496
298,25000
299,15281
299,15281
294,97869
293,46500
334,00000
300,80170
300,80170
300,80170
300,80170
300,80170
300,80170
299,32496
298,30000
297,00000
298,30000
297,00000
298,24700
297,00000
298,30000
298,25722
298,25000
294,73000
302,80000
298,26000
298,25722
Código
AA
AN
BR
BN
CC
CD
EA
EB
EE
EC
ED
EF
AM
FA
HE
HO
ID
IN
KA
RF
SA
WD
WE
Universo actual de datums:
Nombre del Datum
Adindan
Afgooye
Ain el Abd 1970
American Samoa 1962
Anna 1 Astro 1965
Antigua Island Astro 1943
Arc 1950
Arc 1960
Ascensión Island 1958
Astro Beacon E 1945
Astro Dos 71/4
Astro Tern Island (FRIG) 1961
Astronomical Station 1952
Australian Geodetic 1966
Australian Geodetic 1984
Elipsoide de Referencia
Clarke 1880
Krassovsky 1940
International 1924
Clarke 1866
Australian National
Clarke 1880
Clarke 1880
Clarke 1880
International 1924
International 1924
International 1924
International 1924
International 1924
Australian National
Australian National
88
Ayabelle Lighthouse
Bellevue (IGN)
Bermuda 1957
Bissau
Bogota Observatory
Bukit Rimpah
Camp Area Astro
Campo Inchauspe
Canton Astro 1966
Cape
Cape Canaveral
Carthage
Chatham Island Astro 1971
Chua Astro
Corrego Alegre
Dabola
Deception Island
Djakarta (Batavia)
DOS 1968
Easter Island 1967
European 1950 (ED-50)
European 1979 (ED-79)
Fort Thomas 1955
Gan 1970
Geodetic Datum 1949
Graciosa Base SW 1948
Guam 1963
Gunung Segara
GUX 1 Astro
Herat North
Hjorsey 1955
Hong Kong 1963
Hu-Tzu-Shan
Indian 1954
Indian 1960
Indian 1975
Indonesian 1974
Irelan 1965
ISTS 061 Astro 1968
ISTS 073 Astro 1969
Johnston Island 1962
Kandawala
Kerguelen Island 1949
Kertau 1948
Kusaie Astro 1951
L. C. 5 Astro 1961
Leigon
Liberia 1964
Luzon
Mahe 1971
Massawa
Merchich
Midway Astro 1961
Minna
Clarke 1880
International 1924
Clarke 1866
International 1924
International 1924
Bessel 1841
International 1924
International 1924
International 1924
Clarke 1880
Clarke 1866
Clarke 1880
International 1924
International 1924
International 1924
Clarke 1880
Clarke 1880
Bessel 1841
International 1924
International 1924
International 1924
International 1924
Clarke 1880
International 1924
International 1924
International 1924
Clarke 1866
Bessel 1841
International 1924
International 1924
International 1924
International 1924
International 1924
Everest (India 1830)
Everest (India 1830)
Everest (India 1830)
Indonesian 1974
Modified Airy
International 1924
International 1924
International 1924
Everest (India 1830)
International 1924
Everest (Malay&Sing 1948)
International 1924
Clarke 1866
Clarke 1880
Clarke 1880
Clarke 1866
Clarke 1880
Bessel 1841
Clarke 1880
International 1924
Clarke 1880
89
Montserrat Island Astro 1958
M´Poraloko
Nahrwan
Naparima BWI
North American 1927 (NAD 27)
North American 1983 (NAD 83)
North Sahara 1959
Observatorio Meteorológico 1939
Old Egyptian 1907
Old Hawaiian
Oman
Ordnance Survey Great Britain 1936
Pico de las Nieves
Pitcairn Astro 1967
Point 58
Pointe Noire 1948
Porto Santo 1936
Provisional South American 1956
Provisional South Chilean 1963
Puerto Rico
Pulkovo 1942
Qatar nacional
Qornoq
Reunion
Rome 1940
S-42 (Pulkovo 1942)
Santo (DOS) 1965
Sao Braz
Sapper Hill 1943
Schwarzeck
Selvagem Grande 1938
S-JTSK
Sirgas
South American 1969
South Asia
Tananarive Observatory 1925
Timbalai 1948
Tokyo
Tristan Astro 1968
Viti Levu 1916
Voirol 1960
Wake Island Astro 1952
Wake-Eniwetok 1960
WGS 1972
WGS 1984
Yacara
Zanderij
Clarke 1880
Clarke 1880
Clarke 1880
International 1924
Clarke 1866
GRS 80
Clarke 1880
International 1924
Helmert 1906
Clarke 1866
Clarke 1880
Airy 1830
International 1924
International 1924
Clarke 1880
Clarke 1880
International 1924
International 1924
International 1924
Clarke 1866
Krassovsky 1940
International 1924
International 1924
International 1924
International 1924
Krassovsky 1940
International 1924
International 1924
International 1924
Bessel 1841 (Namibia)
International 1924
Bessel 1841
GRS 80
South American 1969
Modified Fischer 1960
International 1924
Everest (Sabah Sarawak)
Bessel 1841
International 1924
Clarke 1880
Clarke 1880
International 1924
Hough 1960
WGS 72
WGS 84
International 1924
International 1924
90
Anexo C: Datums Utilizados en Sudamérica
En este anexo se mostrarán los distintos datums utilizados en Sudamérica con
sus respectivos parámetros de transformación, referidos al datum WGS 84.
Variables relevantes de los cuadros:
Δa = diferencia entre los semiejes mayores de los datum a considerar.
Δf = diferencia entre los achatamientos de los datum a considerar.
Δx, Δy, Δz = parámetros de transformación.
Datums utilizados en Sudamérica.
91
Datums utilizados en Sudamérica.
Datums utilizados en Sudamérica.
92
Datums utilizados en Sudamérica.
Datums utilizados en Sudamérica.
93
Datums utilizados en Sudamérica.
94
Anexo D: Análisis Matemático al Elipsoide
A continuación se mostrará en detalle las obtenciones matemáticas de unas
relaciones para el elipsoide, las cuales se aplicaron a los ejemplos del capítulo 2 y 3.
Consideraciones para los análisis:
φ = latitud geodésica (latitud del lugar).
ψ = latitud geocéntrica que le corresponde a φ.
ψ2 = latitud geocéntrica (mismo ángulo que φ).
R = radio elipsoidal que le corresponde a φ.
Dv = distancia horizontal entre las verticales geodésica (φ) y geocéntrica (ψ2).
θ = diferencia entre las verticales geodésica y geocéntrica, que le corresponde a φ.
f = achatamiento.
a y b = semiejes mayor y menor del elipsoide, respectivamente.
Me
ri
dia
no
Ce
Circunferencia de Referencia
Pe
θ
R
y
ψ ψ2
Dv
c
φ
x2
Qe
x1
x
te
θ
Elipse
b
les
a
Figura D.1.
Relaciones en el elipsoide.
95
Obtención de ψ en Función de φ:
De la figura D.1 se tiene que y = Tg ψ x x (1), de la ecuación de la elipse (2) se
despeja (x) en función de (y) (3), y se reemplaza en (1).
x2 + y2 = 1
a2 b2
x = a x 1 - y2
b2
(2)
1/2
y = Tg ψ x a x 1 - y2
b2
(3)
1/2
(1)
Con (x) en función de (y), se aplica Tg φ = -dx / dy, que es la pendiente de la
recta normal a una curva, y se despeja (y) (4).
Aplicando derivadas en (3):
-a x y
dx =
dy b2 x 1 - y2
b2
1/2
y = Tg φ x b2 x 1 - y2
a
b2
1/2
(4)
Igualando (1) con (4), resolviendo y despejando (ψ), se obtiene:
Tg ψ x a x 1 - y2
b2
1/2
= Tg φ x b2 x 1 - y2
a
b2
Tg ψ = (b2 / a2) x Tg φ
Asiendo k = b2 / a2 = (1 - f)2
ψ = arcTg (k x Tg φ)
Además de la figura D.1 se deduce que θ es:
θ = φ - ψ = φ - arcTg (k x Tg φ)
1/2
96
Obtención de R en Función de φ:
De la figura D.1 se tiene que Tg ψ = y / x, de la ecuación de la elipse (2) se
despeja (y) en función de (x) (5).
y = b x 1 - x2
a2
1/2
(5)
Con x = R x Cos ψ
b x 1 - R2 x Cos2 ψ
a2
1/2
Tg ψ =
R x Cos ψ
Resolviendo, despejando R y reemplazando (b2 / a2) por k, se tiene:
R = a / (Sen2 ψ / k + Cos2 ψ)1/2
Con Cos2 ψ = 1 - Sen2 ψ, resolviendo se obtiene:
R = a / (Sen2 ψ x (1 / k - 1) + 1)1/2
Donde:
ψ = arcTg (k x Tg φ)
Obtención de Dv en Función de φ:
De la figura D.1 se desprende que ψ2 = φ, y que Dv = x2
x = R x Cos ψ, y = R x Sen ψ, x1 = y / Tg φ.
Resolviendo en (6):
Dv = R x Sen φ x (Cos ψ - Sen ψ / Tg φ)
Con Tg φ = (1 / k) x Tg ψ, resolviendo:
Dv = R x Sen φ x Cos ψ x (1 - k)
x
Sen φ (6), con
97
Reducción a φ de Dv:
Dv = a x Sen φ x Cos ψ x (1 - k) / (Sen2 ψ / k + Cos2 ψ)1/2
Resolviendo:
Dv = a x Sen φ x (1 - k) / (1 + Tg2 ψ / k)1/2
Con Tg2 ψ = k2 x Tg2 φ, resolviendo se obtiene:
Dv = a x Sen φ x (1 - k) / (1 + k x Tg2 φ)1/2
Obtención del Apartamiento (Ap) en Función de φ:
Consideraciones para el análisis:
Esfera de Referencia
Elipsoide
Pe
Ap
x
b
R
c
ψ
φ
g
dg
a
Qe
Figura D.2.
Apartamiento en el elipsoide.
De la figura D.2 se tiene:
98
Ap = g x (x / a)
Donde:
x = R x Cos ψ
g = ((2 x π x a) / 360º) x dg
dg = diferencia de longitudes para el Ap a considerar en grados.
Resolviendo:
Ap = (π / 180º) x dg x R x Cos ψ
Reducción a φ de Ap:
Ap = (π / 180º) x dg x Cos ψ x a / (Sen2 ψ / k + Cos2 ψ)1/2
Resolviendo:
Ap = (π / 180º) x dg x a / (1 + Tg2 ψ / k)1/2
Con Tg2 ψ = k2 x Tg2 φ, reemplazando se obtiene:
Ap = (π / 180º) x dg x a / (1 + k x Tg2 φ)1/2
Además de la figura D.2 se deduce que la velocidad de rotación para una Tierra
elipsoidal (Vr) en función φ es:
Vr = (2 x π / ds) x R x Cos ψ
Donde:
ds = día sidéreo = 23,9345 horas.
Reducción a φ de Vr:
Este caso tiene un desarrollo similar al caso anterior, con lo que Vr queda como
sigue:
Vr = (2 x π / ds) x a / (1 + k x Tg2 φ)1/2
99
Obtención
de
las
Equivalencias
Entre
las
Coordenadas
Rectangulares
Geocéntricas (x, y, z) y las Coordenadas Geodésicas (φ, λ, h):
Consideraciones para los análisis:
Z
Pe
b
h
V
P
(x, y, z)
(φ , λ , h)
φ
R
c ψ
Qe
λ
φ
φ
a
Qe´ Y
X
Pe´
Figura E.1.
Coordenadas rectangulares geocéntricas
y coordenadas geodésicas.
Parte A:
Obtención de las coordenadas rectangulares geocéntricas (x, y, z) a partir de las
coordenadas geodésicas (φ, λ, h):
De la figura E.1 se tiene:
x = (R x Cos ψ + h x Cos φ) x Cos λ
y = (R x Cos ψ + h x Cos φ) x Sen λ
z = R x Sen ψ + h x Sen φ
100
Reducción a φ de (x) e (y):
x = (a x Cos ψ / (Sen2 ψ / k + Cos2 ψ)1/2 + h x Cos φ) x Cos λ
Resolviendo:
x = (a / (1 + Tg2 ψ / k)1/2 + h x Cos φ) x Cos λ
Con Tg2 ψ = k2 x Sen2 φ / Cos2 φ, resolviendo:
x = (a x Cos φ / (k x Sen2 φ + Cos2 φ)1/2 + h x Cos φ) x Cos λ
Con Cos2 ψ = 1 - Sen2 ψ, resolviendo:
x = (a x Cos φ / (1 - (1 - k) x Sen2 φ)1/2 + h x Cos φ) x Cos λ
Asiendo V = a / (1 - (1 - k) x Sen2 φ)1/2, con lo que (x) queda igual a:
x = (V + h) x Cos φ x Cos λ
Considerando lo mismo para (y):
y = (V + h) x Cos φ x Sen λ
Reducción a φ de (z):
z = a x Sen ψ / (Sen2 ψ / k + Cos2 ψ)1/2 + h x Sen φ
Con Sen ψ = k x Sen φ x Cos ψ / Cos φ, resolviendo:
z = k x a x Sen φ / (Tg2 ψ x Cos2 φ / k + Cos2 φ)1/2 + h x Sen φ
Con Tg2 ψ = k2 x Tg2 φ, resolviendo:
z = k x a x Sen φ / (k x Sen2 φ + Cos2 φ)1/2 + h x Sen φ
101
Con Cos2 ψ = 1 - Sen2 ψ, resolviendo:
z = k x a x Sen φ / (1 - (1 - k) x Sen2 φ)1/2 + h x Sen φ
Con V = a / (1 - (1 - k) x Sen2 φ)1/2, con lo que (z) queda igual a:
z = (k x V + h) x Sen φ
Con lo que las equivalencias de (x, y, z) son:
x = (V + h) x Cos φ x Cos λ
y = (V + h) x Cos φ x Sen λ
z = (k x V + h) x Sen φ
Donde:
V = a / (1 - (1 - k) x Sen2 φ)1/2
k = b2 / a2 = (1 - f)2
λ = longitud geodésica.
h = altura normal al elipsoide.
Con (y) positivo si el signo de la longitud geodésica es Este, y (z) positivo si el
signo de la latitud geodésica es Norte, por ende si los signos son Weste y Sur serán
negativos.
Parte B:
Obtención de las coordenadas (φ, λ, h) a partir de las coordenadas rectangulares
geocéntricas (x, y, z):
Obtención de φ:
Despejando h de (z):
h = (z / Sen φ) - k x V
102
Reemplazando h en (x), resolviendo:
x = (V x Cos φ x (1 - k) + z / Tg φ) x Cos λ
Reemplazando la igualdad de V y resolviendo, se obtiene:
x / Cos λ = z / Tg φ + a x (1 - k) / (1 + k x Tg2 φ)1/2
Con x / Cos λ = (x2 + y2)1/2 = C
En el que C es el Valor a satisfacer mediante un proceso de iteración con φ, con
lo que la expresión para obtener el valor de φ es:
C = z / Tg φ + a x (1 - k) / (1 + k x Tg2 φ)1/2
La primera aproximación de φ se puede obtener con:
φ = arcTg (z / (k x (x2 + y2)1/2))
Obtención de λ:
Este valor se obtiene directamente con:
λ = arcTg (y / x)
Obtención de h:
Con el valor de φ que satisface el valor de C, se determina h con:
h = (z / Sen φ) - k x V
103
Bibliografía y Páginas Web
S.H.O.A. Pub. 3030
Manual de Navegación
Volumen I
Tercera Edición
1989
S.H.O.A. Pub. 3019
Almanaque Náutico
2006
Introducción Histórica a la Geodesia
Miguel J. Sevilla de Lerma
Universidad Complutense de Madrid
Localizaciones Geográficas
Ignacio Alonzo Fernández
Universidad de Valladolid
2001
The American Practical Navigator
An Epitome of Navigation
Nathaniel Bowditch
Bicentennial Edition
2002
Technical Report 8350.2
World Geodetic System 1984
Department of Defense (USA)
Third Edition
Technical Manual 8358.1
Datums, Ellipsoids, Grids, and
Grid Reference Systems
Defense Mapping Agency (USA)
104
Technical Manual 8358.2
The Universal Grids:
Universal Transverse Mercator (UTM)
And Universal Polar Stereographic (UPS)
Defense Mapping Agency (USA)
Geodesy for the Layman
Defense Mapping Agency (USA)
1984
McKnight
Physical Geography A Landscape Appreciation
1984
ESRI
Map Projections
1994
www.wikipedia.org
www.ineter.gob.ni
www.cartografia.cl
www.mapping.usgs.gov
www.utexas.edu
www.gabrielortiz.com
www.publicacions.ub.es
www.webmar.com