- Ninguna Categoria
5 - TESIUAMI
Anuncio
UNIVERSIDAD AUTONOMA METROPOLITANA-
.-
Unidad Iztapalapa
C'6IT.
n
PROYECTO DE INGENIERIA I y II
''
OSCILOSCOPIODIGITAL
x
T.\CESAR/GOMEZ GAYTAN
Junio De 1994.
3
T. CESAR GOMEZ GAYTAN
INGENIERIA ELECTRONICA EN COMPUTACION
MATRICULA: 86329879
1
INTRODUCCION
Un microprocesador es un dispositivo que puede ser usado para realizar una gran variedad
defunciones. Es decir,es un controladorprogramable.Todoslosmicroprocesadores
realizan tres tareasbbicas:
- Transferencia de datos.
- Operaciones aritméticas y lógicas.
- Toma de decisiones.
Unmicroprocesadorcontrolalasoperacionesde
la memoria y alosdispositivosde
entraddsalida. Las interconexiones entre microprocesadory estos dispositivos se hacen por
y el bus de control.
medio del bus de datos, el bus de direcciones
Las conexiones delbusdedireccionessonusadasparaproporcionarlasdireccionesde
memoria o una dirección de entraddsalida ala memoria.
El bus de datos es usado para llevar información entre el microprocesador y la memoria, o
entre el microprocesador y los dispositivos de entraddsalida.
El busdecontrol
es usado
para
controlar
tanto
elsistemadememoriacomoel
entraddsalida. Consiste de cuatro señales: RD (lectura), WR (escritura), MREQ (petici6n
de memoria) y IOREQ (petición de entrawsalida). Las señales de RD y WR son usadas
para que los datos sean leídos o escritos en memoria. La señal MREQ califica a las señales
RD o WR como lecturas de memoria o escritura a memoria, y las señal IOREQ las califica
como lecturas o escrituras de entraddsalida.
El sistema de memoria en una computadora realiza dos importantes tareas:
l . Almacenar las instrucciones del programa.
2. Almacenar los datos usados por el programa.
En muchos sistemas el programa es almacenado en una memoria ROM (Memoria de sólo
RAM (Memoria deacceso aleatorio).
lectura) y los datos son almacenados en una memoria
Los dispositivos
de
entradalsalida
en
una
computadora
logran
la interacción
del
microprocesador con el mundo exterior. El microprocesador se comunica a los humanos y
/o a otras maquinas a travesde los dispositivosde entrawsalida, loscualessedefinen
como dispositivos que aceptan
una señal eldctrica para procesamiento
o la generan
2
Los dispositivos
de
entraddsalida
en
una computadora
logran
la interacción
del
microprocesador con el mundo exterior. El microprocesador se comunica a los humanos y
/o a otras mhquinasatravbsdelosdispositivosdeentraddsalida,
loscualessedefinen
como dispositivos que aceptanuna s e u elbctrica para procesamientoo la generan
JUSTIFICACION
La idea bbica para el disefio y desarrollo de este proyecto surgió dela observación de los
grandesproblemasquesetienencuandosehacenmedicionesdeseflalesanalógicascon
dispositivos tambibn analógicos. Se vio la necesidad de poder almacenar las formas de las
seiIales que se miden yasea en memoriao en archivos para que pudieranser analizadas con
mayor detalle. Es por ello que se desarrolló un sistema que toma muestras de una seÍíal
analógica cualquiera y las transmite hacia el puertoseriede una computadora,dondese
grulca en pantalla la forma de onda de dicha sefial analógica. Todo esto selleva a cabo con
lo que hemos llamado Osciloscopio Digital trabajando en tiempo real.Lo que significa que
la muestra tomada es inmediatamente transmitida, por lo que
la fiecuencia de operación del
sistema depende en gran parte del convertidor analógico-digital y del microcontrolador que
se estbn usando.
KIT BASADO EN EL MICROCONTROLADOR 8031
El microcontrolador 8031esunode los miembros de la familia MCS-51 de INTEL, y es
toda una micro computadora fabricada en una sola pieza desilicio. Esta familia se creópara
usarse en aplicaciones de tiemporeal, control industrialy para perif6ricos de computadora.
Todosestosmicrocontroladorespuedenserexpandidoshasta
64 Kbytes enmemoriade
programa y hasta 64 Kbytes de memoria de datos, usando circuitos integrados de memoria
externos.
Independientemente de la memoria externa todos ellos tienen:
128 bytes de memoria interna asignada para los SFR (Registros de Función Interna)
aunque sólose puedanusar 21 de ellos. INTEL ha reservado losrestantes para
futuras expansiones.
0
Cuatropuertosprogramablesde VO; sinembargoalgunosdeellosseusan
manejo de la memoria externa.
3
para el
O
Dos TimedContadores de 16 bits cada uno.
0
Unpuertoserial.
O
Circuitería interna parael oscilador del reloj.
0
0
Cuatro bancos de registro (con 8 registros cada unode ellos), los cuales se localizan
en la memoria de datos interna.
Cinco lineas deinterrupción(dosdefuentesexternas
dos niveles de prioridad.
y tres de fuentes internas con
Organizaci6n De Memoria
La familia del 8031 tiene dos tipos de memoria:
l. La memoria de programa.
2. La memoria de datos.
La memoria de programa puede ser hasta 64 Kbytes. Donde los primeros 4 Kbytes pueden
residir dentro de microcontroladoro pueden estar los64 Kbytes externamente.
Dentro de la memoria de datos se distinguen dos tipos:
Una es la memoria externa, la cual puede crecer hasta 64 Kbytes y la otra es la memoria
interna la cualconstade
128 bytes;estos 128 bytespuedenseraccesadosdirectae
indirectamente.
Los 128 bytes de memoria de datos internaestán divididos entres áreas:
a. Los bancosderegistro 0-3: de la dirección OOh a la 1Fh (32 bytes).Cadaban co
empleado contiene 8 registros (0-7).
b. Posee una área direccionablep o r bit, de la direcci6n 20h a la 2Fh para un total de 16
bytes. Cada uno de los 18 bits de esta área pueden ser direccionados correctamente
(00-7Fh).
c. Tiene una área multiusos que va de los bytes 30h
de datos delusuario o cualquier otro uso.
4
""-
-
al 7Fh y puede usarse como área
Software
El juego deinstruccionesdeestosmicrocontroladoressepuededividiren:
55% de
instrucciones de un byte, 36% de instrucciones de dos bytes, yel 9% de tres bytes.
Existe una gran diferencia entre la memoria de datos internay la externa. Las direcciones de
datos internas se refieren a aquellas que esth dentro de chip y que se pueden accesar de
varias formas; mientras que l a s direcciones externas están localizadas fuera de chip, en los
64 Kbytes de memoria de datos externa y
s610 puede ser accesada con las instrucciones
MOVX.
La interface programable (PPI)8255
La interface programable de perifdricos (PPI)8255 es uno de los circuitos de soporte m&
útiles y flexibles del 8055. Contiene tres puertos paralelos programables de entradalsalida
de ocho bits,cada uno con características propias.
El sentido y la funci6n de l a s líneas de todos los puertos se programan durantela operaci6n
8 bits
que
envía
el
normal
del
dispositivo
mediante
una
palabra
de
control
de
microprocesador al PPI.
Internamente el 8255 dispone de cuatro registros, tres de los cuales se dedican a almacenar
la informaci6n que entrao sale por los puertos A, B y C.El cuarto se denomina registro de
control, y como su nombre lo indica,sededicaarealizarlasfuncionesdecontrol.
Programando este registro se configuran los puertos y se define el hcionamiento general
de los dispositivos.
Velocidad de respuesta
Respecto a la velocidadderespuesta,
el OsciloscopioDigitaltendrii
un rendimiento
un ciertointervalo
de
satisfactorio s610 paraseñalesqueseencuentrendentrode
frecuencias. Según el teorema de Nyquits, la frecuencia de muestreo debe ser al menos el
doble de la frecuencia mhxima de la señal muestreada. La fkcuencia de muestreo de este
sistema e s a determinada por la velocidad de respuesta o procesamiento de información de
la PC.Esto se explica de la siguiente manera:
Aunque la señal es muestreada por el convertidor analógico-digital, Cste entrega los bytes
muestreados al Kit 8031 y estea su vez los entrega a la PC. Sin embargode los tres
5
dispositivos antes mencionadosla PC es elmas lento, ya que el tiempo transcurrido entre
la
lecturadelpuertoserie
y la graficacióndeldatoleídoesconsiderablementegrande
si
tomamos en cuenta la velocidad de muestreo de convertidor y la velocidad de transmisión
o
del microcontrolador. Así que todos los bytes que se muestrean en este tiempo se pierden
sonignoradospor la PC.Estoexplicaclaramenteporqué
la velocidaddemuestreo "es
impuesta" porla PC.
En un principio se consideró que las muestras se tomaran en base a interrupciones hechas al
Kit 803 l. Es decir, el convertidor da a su salida un byte el cual queda "enganchado", luego
manda una señal de interrupción al Kit 803 1, quien a su vez ejecuta una rutina de servicio
para tomar el byte y mandarloal puerto serial de la PC. Mientras tanto el convertidor ya no
envía nada. Luego, la PC gráfka el byte leído de su puerto serial y envía una sefial de fin
proceso al Kit 8031. El Kit 8031 manda entonces una señal al convertidor indichdole que
ya puede enviar otro byte,repitihdose lo anterior enun ciclo.
Esta descripción de funcionamiento es mucho m& confiable en cuanto a que se
evita la
perdidadeinformación.
Sin embargoalaumentarseñalesdehandshaking(señalesde
control), la frecuencia de muestreo disminuyey por lo tanto el alcance del equipo tambidn.
Por tal motivo se evitaron todas esta formalidades.
Amplitud de las seilales muestreadas
El convertidoranalógico-digital
referencia de las muestras son:
e s a configuradode
tal maneraquelos
voltajes de
- voltaje mínimo igual a O Volts (tierra).
- voltaje mhximo igual a5 Volts.
Por lo tanto sólo pueden graficarse señales cuya amplitud est6 entre
O y 5 Volts.
Programacih de Baud Rate
La programación del Baud Rate (velocidad de transmisih) es un punto en el que se debe
poner especial atención.En teoría se puede programar una gama de baud rates que puedeir
dando un valor al registro t h l del
desde 150 hasta 36000 baudios;ést0selogra
microcontrolador 803 1 en base ala fórmula:
thl = 256 - ((2*fiec. de osc.) / (386*baud rate))
6
pero, al calcular el error de aproximación respecto a baud rate requerido, nos damos cuenta
de que este valor esmuy grande. Es decir, al despejar dela fórmula anterior el baud ratecon
el thl programado, vemos que estos difieren mucho. Por ejemplo, para un oscilador de 12
MHz y un baud rate de 9600, de acuerdo con la fórmula se tiene un thl de 249.5 el cual se
redondea a250.
Paracomprobar
la certezadelcálculo,despejamosel
baud
rate
de
la fórmula, y
sustituyendo el thl=250, obtenemos un baud rate real de 10416.6. Este error (8% diferente)
nopermiteque
la PCleaconsincroníalosbytesquelleganalpuertoserialypor
consiguiente el programa se abortará.
Se sugiere entonces que, para tener
un baud rate muy cercano al requerido cambiarel cristal
de cuarzo enel circuito osciladorpor otro que permitauna buena aproximación.
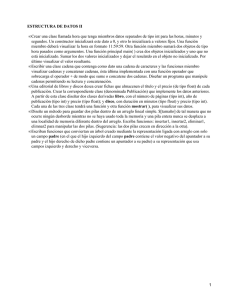
Diagramas
Los diagramas etiquetados como 1 y 2 muestran el diseño de los circuitos utilizados en la
construcción del Osciloscopio Digital.
La primera parte (diagrama1) muestra el sistema mínimo del KIT microcontrolador 803 1 y
consta de lo siguiente:
1 . Microcontrolador 803 1 (el "cerebro" del sistema).
2. Memoria EPROM. Contiene el programa monitor del sistema.
3. Memoria RAM de 64 Kbytes.
Donde
se
almacenan
los
programas
ejecutables.
4. Display de 8 dígitos. Utilizado para visualizar direcciones de memoria, datos
contenidos en la misma, etc.
5. Teclado. Compuesto de 24 teclas.
6. Mapeo de 2 Kbytes.
7. Bus de datos de8 bits.
8. Bus de direcciones de 15 bits.
La segunda parte (diagrama 2) muestra la conexión del sistema conel PPI y el convertidor
sus puertos de 8 bits actúa
analógico-digital. El PPI se programó de tal modo que uno de
I
I
.
s
1
2
9
m
4
i
I m
" I
I
X
BUS DE: COMTROL
J
DIR 1 8 0 0 ” I F F F ~
”1
R E X T/CEXT
I
a
IMT
a
DEL Bo31
T+t I t
PROYECTOTERHINCY
I Y 11
comoentrada. El convertidoranalógico-digitalse
hizo trabajara una velocidadde
aproximadamente 600 KHz, entregando 600 muestras de 8 bits por segundo.
Cada vez que el convertidoranalógico-digitalentrega una muestraalmicrocontrolador
803 1, le envía un pequeÍí0 pulso a unade sus interrupciones para indicarle el envío. Sin
embargodebidoaqueestepulsoesdemasiadocortoelmicrocontroladornoalcanzaa
reconocerlo. Es por ello que se usó el circuito 7412 1 para ampliar el tamaño del pulso y que
Cste pudiera ser reconocido fácilmente por el microcontrolador.
Programacidn del KIT 8031
A continuación se lista el programa desarrollado en lenguaje ensamblador que programa al
Kit 803 l . Este programa se carga enla memoria RAM del Kit.
MOV A,#90H
PALABRA DE CONTROL
PARA EL 8255, CON LOS
PUERTOS: A, DE ENTRADA; B Y C, DE SALIDA.
MOV DPTR,#1803HDIRECCION DEL 8255, CONAO=A1=1,CON LA CUAL
ESTA LISTO PARA LEER UNA PALBRA DE CONTROL.
MOVX @DPTR,A
ESCRIBE LAPALABRA DE CONTROL AL 8255.
CLR P1.0
INICILAIZA EL PUERTO, PARA INDICAR EL INICIO DE
CONVERSION.
MOV DPTR,#1800HDIRECCION DEL 8255, CONAO=Al=O,CON LA CUAL
ESTA LISTO PARA SER ACCESADO.
INICIO:
SUBRUTMA INICIO.
SETB P1 .O
INDICA AL CONVERTIDOR A/DQUE S E PREPARE
PARA UN INICIO DE CONVERSION "START".
CLR
INICIO DE CONVERSION
PARA
P1.0
SETB P1.2
INHABILITA
MOV
R1 ,#O 1H
EL ADC0800.
LA COMUNICACION
HASTA
BIT SEAPUESTO EN CERO.
QUE ESTE
ESPERA:
SUBRUTINA ESPERA.
JB
SENSA EL FIN DE CONVERSION A TRAVES DE ESTE
PUERT0,Y AL DETECTARLO CAPTURA EL DATO
DIGITAL.
SJMP
P1.1
,CAPTURA
ESPERA
ESPERA HASTA DETECTAR EL FIN DE CONVERSION.
CAPTURA:
SUBRUTINA CAPTURA.
MOVX
A,@DPTR
LEE LA PALABRA DE EL PUERTO 8255, DADA POR EL
CONVERTIDOR A/D Y LA PONE EN EL ACC A.
LCALL
TRANSM
SE LLAMA LA RUTINA DE TRANSMISIONY SE
TRANSMITE EL DATO LEIDO DE EL 8255.
SJMP
INICIO
PERMANECE CONVIRTIENDO Y TRANSMITIENDO
HASTA QUE SE INTERUMPA LA EJECUCION DEL
PROGRAMA.
TRANSM:
SUBRUTINA TRANSM.
R2,#08H
MOV
NUMERO DE BITSA TRANSMITIR, DADA LA
PROGRAMACION DEL PUERTO SERIE DE LA PC.
CLR
P1.2
BIT DE INICIO PARA LA COMUNICACION SERIE
NORMA RS-232.
LCALL
RETARDO
GENERA UN RETARDO PROPORCIONAL AL PERIODO
DE TRANSMISION((1/9600) SEG PARA ESTE CASO).
DJNZR1,DATOS
SU FUNCION ES SOLO PARA COMPENSAR LA
VELOCIDAD DE TRANSMISION DE EL BIT DE INICIO.
DATOS:
SUBRUTINA DATOS.
RRC
A
ROTA HACIA EL ACUMULADOR EL BIT
MAS
SIGNIFICATIVO.
MOV
P1.2,C
MUEVE AL CARRY(MSB),AL PUERTO P1.2, DONDE
ES TRANSMITIDO HACIA EL PUERTO SERIE DE LA
PC.
LCALL
RETARDO
GENERA UN RETARDO PROPORCIONAL AL PERIODO
DE TRANSMISION ((1/9600) SEG PARA ESTE CASO).
9
DJNZ
R2,DATOS
REVISA QUE SE HAYAN TRANSMITIDO LOS OCHO
BITS DE INFORMACION.
SETB P1.2
BIT DE PARO DE LA TRANSMISION DE LA PALABRA
DE OCHO BITS.
LCALL
RETARDO
GENERA UN RETARDO PROPORCIONAL AL PERIODO
DE TRANSMISION((1/9600) SEG PARA ESTE CASO).
RET
RETORNO DE LA SUBRUTINA.
RETARDO:
SUBRUTINA RETARDO.
MOV
R3,#OEH
VALOR PARA EL CUALSE ALCANZA EL RETARDO
DE (1 /9600) SEG.
NOFUNC:
SUBRUTINA NOFUNC.
NOP
CICLO DE RETARDO.
NOP
CICLO DE RETARDO.
DJNZ
R3,NOFUNC
AQUI SE SUSPENDE MOMENTANEAMENTE LA
OPERACION DEL PROGRAMA CON CICLOS DE NO
OPERACION.
RET
END
Software de PC
Se desarrolló un programa en el lenguaje de programación C que se encarga de graficar y
mostrar en pantalla los datos que llegan a1 puerto serial de la PC.
Este programa se divide básicamente en
tres partes principales:
- Inicialización grhflca.
- Lectura de puerto serial.
- Graficacih de la sefial.
La inicialización grhfica tiene la función de dar de alta los archivos grhfícos y ver por las
especificaciones particulares del monitor.Es decir, identifica eltipo de monitor mediante el
número de pixeles del mismo.
La lectura del puerto serial se hace tratando a éste como un archivo. Se abre el puerto serie
declarándolo como un nombre con carácter de archivo quedando listo para hacer lectura de
los datos.
La graficación de la señal se lleva a cabode la siguiente manera:
Debido a que los bytes son de8 bits, se tienen valores entreO y 255, donde el cero indicala
amplitud minima dela sefial muestreada, que en nuestrocaso será O volts, y 255 la amplitud
mhima que serh de 5 volts. Después se considera que el pixel superior (pixeles verticales)
equivale al byte 255 y que el pixel inferiorcorresponde al byteO.
Una vez encendido un pixel, el programa hace que el punto de referencia sobre X (pixeles
horizontales) se desplace una delta X, donde se grdlcará otro pixel. De esta forma se hace
un barrido horizontal hasta llenar la pantalla con la señal recuperada. Una vez que se llena
la pantalla con la gráfica, se borrará y se repetirá el proceso desde el extremo izquierdo del
monitor.
11
"
"
..
..
...
"
_
I
"
// PROGRAMA UTILIZADO PARA GRAFICAR DATOS LEIDOS DEL PUERTO
I/ SERIAL.
#include <stdio.h>
#include <conio.h>
#include <alloc.h>
#include <math.h>
#include <graphics.h>
#include <dos.h>
#define NoPuntos5 12
#define SI 1
#defmeNO O
#define ESC 27
typedef short Bool;
enum Dominios {
TMPO,
FREC
1;
enum Opciones {
REAL,
MAGN,
POTN
1;
void MenuPrin (Bool *apesd, Bool *apslr);
void LeerSec (float **apentr, float **apenti, int *apnmax, Bool esdir);
Bool Transfim (Bool esdir, float entr[], float entin, float **apslr, float **apsli, int nmax);
void OpcSal (float tmprn, float tmpi[], float ficro, float fici[], int nmax);
void LeerArch (float **apentr, float **apenti, int *apnmax);
m
h
,char nmvr);
void Leerpuerto (float **apentr, float **apenti, int *apnmax, charn
void BorrLin (intnumlin);
void Leercmpj (float entro, float enti[], int n, char car);
void DespMenu (void);
void Indicar (int posx, int sel);
Bool Calcular (float **apsup, float **apinf, float secr[], float secin, int nmax, int opc);
void Graficar (float ssup[], float sinfn, int nmax, int opc);
12
void Listar (float ssup[], float S*], int
nmax, int opc);
void Salvar (float seer[], float secin, int nmax);
Bool Aprob (void);
Bool ModoGraf (void);
void MinMax (float sec[], int nmax, float *apmin, float *apmax);
// m6dulo principal
main 0
{ int nmax;
Bool esdir, salir, exito;
float *entre, *entim, *salre, * d m ;
textmode (BW80);
MenuPrin (&esdir, &salir);
while (!salir) {
LeerSec (&entre, &entim, &nmax, esdir);
i f (nmax){
// Si entrada
nula
no
exito = T r a n s h (esdir, entre, entim, &salre,&salim, nmax);
i f (exito) {
// Si salida
nula
no
i f (esdir)
OpcSal (entre, entim, salre, salim, nmax);
else
OpcSal (salre, salim, entre, entim, nmax);
I
I
I
I
free (salre);
free (salim);
free (entre);
free (entim);
MenuPrin (&esdir, &salir);
closegrapho;
void MenuPrin (Bool *apesd, Bool *apslr)
{ char car;
clrscro;
printf("Mndique la opcion a seguir: .. h");
printf("h transformada
[Dlirecta");
printf("h transformada
[Ilnversa");
printqt1\n
[Slalirhh");
13
while ( (car=getchO)!='d' &$ car!='? && car!='s');
*apesd = (car='&) ? SI : NO ;
*apslr = (cF's') ? SI : NO ;
1
void LeerSec (float **apentr, float **apenti, int *apnmax,
Boo1 es&)
{ char car;
char nmfn,nmvr, *so;
nmfn= esdir? 'g' : 'G' ;
nmvr = esdir?'k' : 'n' ;
= es&r ? "T" : "fo" ;
clrscr();
,
mfn,nmvr, so);
printf("\n\nleer %c(%c%s) desde: .. h"n
printf("h [Dlisco'');
printf("h [Pluerto seriehh");
while ( (car=getcho)!='d' && car!='p');
if (car=='&)
LeerArch (apentr, apenti, apnmax);
else
{
InicializaModoGrafko();
nmfn, nmvr);
Leerpuerto (apentr, apenti, apnmax,
1
void LeerArch (float **apentr, float **apenti, int *apnmax)
{ char nmarch[80];
FILE *arch;
int nmax;
int posy;
float *entr, *enti;
size-t m,ni;
Boo1 reint;
// Rutina de Apertura de Archivo.
posy = whereyo;
gotoxy (1,posy);
BorrLin (5);
printf ("Entre el nombre del archivo : .. 'I);
(nmarch);
gets
//
nombre
archivo
Entra
el
del
arch = fopen (nmarch,"rb");
i f (!arch) {
printf (%No fue posible abrir el archivo %s\n",nmarch);
printf ("hIntentar de nuevo ? (s/n) .. ");
reint = Aprobo;
1
} while ( !arch && reint );
// Fin rutinaaperturaarchivo
if (!arch) {
*apnmax = O;
return;
// Si fiacaso en la apertura
// Indica
entrada
nula
// Y regresa
1
// Lectura del Tamaño de los Arreglos y Asignacion de Memoria.
fiead (&nmax, sizeof(int), 1/*elemento*/, arch); // Lee nmax
entr = calloc (nmax/*puntos*/, sizeof(float) );
enti = calloc (nmax/*puntos*/, sizeof(float) );
// Asigna memoria
i f (!entr 11 !enti) {
// Si memoria
insuficiente
printf ("Wemoria insuficiente. Lectura de disco
no realizada.\n");
printf ( Y n Pulse 'ESC' para salir .. ");
while ( getch() != ESC );
*apnmax = O;
// Indica
entrada
nula
// Liberamemoriasiasignada
i f (entr) fiee (entr);
i f (enti) fiee (enti);
fclose (arch);
return;
// Y regresa
1
// Transferencia de los Datos del Disco a los Arreglos.
do {
datos delectura
//deRutina
nr = fiead (entr, sizeof(float),nmax /*puntos*/, arch);
ni = fiead (enti, sizeof(float), nmax /*puntos*/, arch);
i f (nr!=nmax 11 ni!=nmax) {
// Si error
de
lectura
15
posy = whereyo;
printf ("Wrror durante la 1ectura.h");
printf ("hDesea intentar de nuevo ? (s/n)
reint = Aprobo;
/I Si reintentar
i f (reint) {
N Restaura
pantalla
gotoxy (1 ,posy);
BorrLin (5);
fseek(arch,(long)sizeof(int), SEEK-SET);
1
Nlectura
Finde
si error
11 nr!=nmax) && reint );
fclose (arch);
1
1
N Fin lectura
Narchivo
Cierra
el
i f (nr"llmax
&& ni==nmax){
*apnmax = nmax;
*apentr = entr;
*apenti = enti;
else {
(entr);
free
free (enti);
*apnmax = O;
N Restauraarchivo
reintentar
I! Fin si
1
} while ( (nr!=nmax
.. ");
N Si lectura
exitosa
/I Indica
entrada
nula
no
/I Y asigna los arreglos
// Si lectura
fallida
I/ Liberar
memoria
N E indicar
entrada
nula
fallida
lectura
I/ Fin si
void BorrLin (int numlin)
{ int i;
for (i=O; i<numlin, i t t )
delhe();
1
DibujaEjesO
{
int MaxX = getmaxxo;
int MaxY = getmaxyo;
16
."
-
setcolor( getmaxcolor());
rectangle( O, O, MaxX, MaxY);
line(30,MaxY-53,MaxX-3O,MaxY-53);
line(3O,MaxY-52,MaxX-3O,MaxY-52);
line(MaxX-35,MaxY-58,MaxX-3O,MaxY-53);
line(MaxX-35,MaxY-48,MaxX-3O,MaxY-53);
line(MaxX-35,MaxY-58,MaxX-3O,MaxY-53);
line(MaxX-35,MaxY-48,MaxX-3O,MaxY-53);
line(30,50,30,MaxY-53);
line(3 1,50,3 1 ,MaxY-53);
line(25,55,30,50);
line(26,55,3 1,50);
line(35,55,30,50);
line(36,55,3 1,50);
settextstyle@EFAULT FONT, HOU-DIR, 1);
outtextxy( MaxX/2-14*8,16,"Gráficaci6n
en Tiempo Real");
outtextxy( MaxX/2-4*8, MaxY-18,"Tiempo");
outtextxy( 30,MaxY-48,"0");
outtextxy( 130,MaxY-48," 10");
outtextxy( 230,MaxY-48,"20");
outtextxy( 330,MaxY-48,"30");
outtextxy( 430,MaxY-48,"40");
outtextxy( 530,MaxY-48,"50");
outtextxy( MaxX-40,MaxY-43,"mseg");
settextstyle(DEFAULT-FONT, VERT-DIR, 1);
outtextxy( 20, MaxY/2- 4*8, "Amplitud");
void Leerpuerto (float**ape&, float **apenti, int *apnmax,
char n d h , char nmvr)
{ int nmax=NoPuntos;
float *entr, *enti;
int posy,cntrl;
char cad[30];
struct text-info info;
int altura, ancho, altvnt;
int n, naux, fin;
unsigned data=(OxO3 I Ox00 I Ox00 I OxEO);
int Xi=32,Yi=5O,X~getmaxxO-38,Y~getmaxyO-54,i,puntoY,color;
int car;
float DivisoF1,Amplitud= 1 ;
17
"
1_1
// Leer Numero de Puntos y Asignar Memoria.
entr = calloc (nmax/*puntos*/, sizeof(float) );
enti = calloc (nmax/*puntos*/, sizeof(float));
// Asigna memoria
if (!entr 11 !enti) {
// Si memoria
insuficiente
printf ("Wemoria insuficiente para alojar
la secuencia.\n");
Desea intentar de nuevo? (s/n) .. ");
printf
( l b
1
} while ( (!entr
11 !enti) && Aprob() );
if ( !entr 11 !enti ) {
*apnmax = O;
if(entr)free(entr);
if (enti) free (enti);
return;
// Si memoriainsuficiente
// Indica
entrada
nula
// Liberamemoria si asignada
// Y regresa
1
// Ciclo de Lectura de Datos del Puertoy Eco en Pantalla
naux = O;
n = O;
bioscom(O,data,O);
DibujaEjeso;
setviewport(Xi,Yi,Xf,Yf,l);
~u~~oY=(Y~+NoPu~~os-~OO)/~;
do // Graficarh mientras no se presionealguna tecla
{
moveto(0,puntoY);
for (i = O; i <= (int) (NoPuntos -l)*Divisor; i++)
do {
car=OxFF & bioscom(2,0,0);
entr[i] = car;
enti[i] =O;
puntoy = (Yf+NoPuntos-300)/2 Amplitud*car;
lineto(i/Divisor,puntoY);
} while(iMNoPuntos);
clearviewport();
}while (!kbhit());
restorecrtmode();
-
*apnmax = NoPuntos;
// Indica entradano nula
18
*apentr = entr;
*apenti = enti;
// Y asigna arreglos
void Leercmpj (float entr[],float entia, int n, char car)
{ int Po=, posy;
char cad[80], *pos, *cd2;
posx = wherexo;
posy = whereyo;
// Leer la Cadena.
pos = cad;
do {
if (car==O)
getcho;
else if (car==8) {
if (poecad) {
putchar (8);
putchar
putchar (8);
pos";
// Si tecla no ASCII, leer codigo
// Si BACKSPACE, borrar anterior
I);
1
1
else if ( (unsignedchar)car>3 1 ) {
putchar (car);
*(pos++) = car;
1
// Si es imprimible
} while ( (car=getchO)!=13 );
// Mientrasno RETURN
*pos = '\O';
// Termina la cadena
// Separar la Cadena en sus Partes Real e Imaginaria.
pos = cad;
while ( *pos!='\O' && *pos!=',' && *pos!=' ' )
Pos++;
cd2 = pos;
while ( *cd2!='\0' && (*cd2=',' 11 *cd2=' ') )
cd2++;
*pos = '\O';
entr[n] = atof (cad);
enti[n] = atof (cd2);
19
gotoxy (POS& posy);
clreolo;
cprintf ("%10.4g %10.4gjhw, entr[n], enti[n] );
Bool Transfim (Bool esdir, float entro, float enti[],
float **apslr, float **apsli, int nmax)
{ float *salr, *sali;
char sgn;
float coef, coefg, cosa, sena;
int numitrs, iter, numgpos, grupo, ptsgpo2;
int n, nini, nfold, dn;
float *aper, *apei, *apsr, *apsi;
float gr, gi, hr, hi;
int num, factor, opuesto;
clrscr();
// Asignacion de Memoria para las Secuencias Resultado
salr = calloc (nmax/*puntos*/, sizeof(float) );
sali = calloc (nmax/*puntos*/, sizeof(float) );
// Asignamemoria
i f (!salr 11 !sali) {
// Si memoria
insuficiente
printf ("Memoria insuficiente. Calculono realizad0.W');
printf ("hPulse 'ESC' para salir .. ");
while ( getch() != ESC );
i f (salr) free(salr);
// Liberamemoriasiasignada
i f (sali) free (sali);
return (NO);
// E indica no exito
1
// Copia de las secuencias de entrada.
// Calculo de la Transformada Rapida de Fourier.
sgn = esdir ? -1 : 1;
// Signodelexponente
/ nmax;
// Coeficiente delexponente
coef = sgn * 2 * "PI
20
numitrs = (int) ( log((doub1e)nmax) / log(2.0) ); // Iteraciones
for (iter==O; iter<numitrs; iter++) {
numgpos = (int)pow(2.0,(float)iter);
/* Grupos: 2"iter
ptsgpo2 = (nmax/numgpos) / 2; // Puntos por grupo / 2
coefg = coef * numgpos;
// Coeficiente paraestaiter.
for (grupo=O; grupo<numgpos; grupo++){
nini = grupo * ptsgp02 * 2 ;
// Inicio del grupo en turno
nfold = nini + ptsgp02 ;
// La mitaddel grupo en turno
for (n=nini,dn==O; n<nfold; n++,dn++){
gr = salr[n];
hr = salr[n+ptsgpo2];
gi = sali[n]; hi = sali[n+ptsgpo2];
salr[n] = gr + hr; sali[n] = gi + hi;
cosa = cos (coefg*dn);
sena = sin (coefg*dn);
salr[n+ptsgpo2] = cosa*@-hr) - sena*(gi-hi);
sali[n+ptsgpo2] = sena*@-hr) + cosa*(gi-hi);
1
1
1
// Ordena los Resultados de la Transformacion.
for (n=l ;n<nmax; n++) {
num = n;
opuesto = O;
factor = nmax;
while (factor>l) {
factor I= 2;
opuesto += (1 & num) * factor;
num >>= 1;
1
i f (opuesto>n) {
gr = salr[n];
salr[n]
sali[n]
gi = sali[n];
= salr[opuesto];
salr[opuesto]
= sali[opuesto];
sali[opuesto]
1
1
i f (!esdir)
for (n=O,apsFsalr,apsi=sali; n<nmax; n++,apsr++,apsi++) {
*apsr /= nmax;
*apsi I= n m a x ;
1
*apslr = salr;
// Asigna arreglos
21
= gr;
= gi;
*apsli = sali;
return (SI);
N Indica exito
1
void OpcSal (float tmpr[], float tmpi[], float
frcru, float frci[],
int nmax)
{ Boo1 haydom, hayopc, slvdot, slvdof,salir, exito;
int dom, opc;
char car;
float *secr, *seci;
float *ssup, *sinf;
const
const
const
const
posx= 6;
posy= 21;
xdom= 4;
xopc= 27;
// Posicion de inicio de mensajes
N Posicion horizontalde los menus
N de dominio y mostrar
haydom = NO;
hayopc = NO;
slvdot = NO;
slvdof = NO;
salir = NO;
do
DespMenuO;
if (haydom) Indicar (xdom, dom);
opc);
if (hayopc) Indicar (xopc,
gotoxy oposx,PosY);
printf("1ndique su seleccion: .. ");
car = getcho;
dellineo;
gotoxy (Po~x,PosY);
if (car-='t' I( car-='f) {
dom = (car-='t') ? T W O : FREC ;
secr = (car=='t') ? tmpr : ficr ;
seci = (car-=lt') ? tmpi : frci ;
haydom = SI;
1
else if (car=='r' 11 car=='m' 11 car=='p') {
opc = (car=='r') ? REAL : (car=='m') ? MAGN : POTN ;
hayopc = SI;
1
else if (car=='g' 11 c p ' l ' ) {
22
i f (!haydom 11 !hayopc) {
i f (!haydom)
printf ("No ha elegido dominio. PulseESC .. ");
else
printf ("No ha indicado que mostrar. PulseESC .. ");
while ( getch() != ESC );
I
else {
exito = Calcular (&ssup, &sinf, secr, seci, nmax, opc);
i f (exito) {
i f (car=='g')
Graficar (ssup, sinf, nmax, opc);
else
Listar (ssup, si&, nmax, opc);
// No liberar
las
secuencias
si
i f (opc!=REAL) {
//fueron
nocalculadas
free (ssup);
free (sinf);
I
// Fin si opc no es REAL
I
exito
// Fin si
I
// Fin si haydom y hayopc
I
//esFin
car si
'g' o '1'
else i f (car=='a') {
i f (!slvdot) {
printf (%Desea salvar secuencia de tiempo en disco
? (s/n) ..");
i f (Aprob())
Salvar (tmpr, tmpi,nmax);
I
i f (!slvdof) {
printf (%Desea salvar secuencia de frecuencia en
disco ? (s/n) ..");
i f (Aprob())
Salvar (ficr, fici, nmax);
I
I
salir = SI;
else if (cF's')
{
i f (!haydom) {
printf ("No ha elegido dominio. PulseESC .. ");
while ( getch() != ESC );
I
else {
Salvar (secr, seci, nmax);
slvdot = slvdot 11 (dom=TMPO);
slvdof = slvdof 11 (dom=FREC);
I
I
23
} while (!salir);
void DespMenu (void)
{
clrscr();
gotoxy (895);
MODO");
printf("DOMINI0
MOSTRAR
gotoxy (698);
printfr [TI iempo
[R]imaginaria
eal
e
[GI raficar");
gotoxy (6,l O);
printf("[F] recuencia
[M]
agnitud
fase
y
b]istar");
gotoxy (29,12);
printf("[P] otencia");
gotoxy (14,16);
[A] bandonar");
printf("[S]
alvar
secuencia
1
void Indicar(int posx, int sel)
{ int opc;
char car;
const int maxopc = 3;
const int yini = 8;
for (opc=O; opc<maxopc; opc++) {
gotoxy (posx, yini+ 2*0pc);
car = (opc=sel) ? : ;
putch (car);
I*'
1
Boo1 Calcular (float **apsup, float **apinf, float
secru, float seci[],
int nmax, int opc)
{ float *sup, *sinf, val;
int n;
24
"
i f (opc-REAL)
ssup = secr;
sinf = seci;
/I Si REAL,hay
no
que
calcular
{
1
else {
N Si MAGN o POTN,
inicia
N Asignacion de Memoria para las Secuencias.
ssup = calloc ( nmax/*elementos*/, sizeof(float) );
sinf = calloc ( nmax/*elementos*/, sizeof(float) );
i f (!ssup 11 !sinf) {
/I Si intento
fallido
printf ("No hay memoria suficiente.ESC para continuar .. ");
while ( getcho != ESC );
i f (ssup) free (ssup);
/I Libera
memoria
asignada
si
i f (sinf) free (sinf);
return (NO);
N Y regresa
1
N Realizacion del Calculo de las Secuencias.
for (n=O; n<nmax; n++) {
val = secr[n]*secr[n] + seci[n]*seci[n];
ssup[n] = (opc=MAGN) ? sqrt(val) : val ;
val = secr[n] ? atan2 (seci[n], secr[n]) : seci[n] ? M-PI-2 : O ;
s i a n ] = (opc-MAGN) ? val : 0.0 ;
1
1
*apsup = ssup;
*apinf = SS,
return (SI);
1
(si else
N Fin
no REAL)
/I Asigna
secuencias
exito
N Indica
void Graficar (float ssupn, floatsinfn, int nmax, int opc)
{ Boo1 exito;
float vmin, vmax,escx, escy, *sec;
int sup[2], -21,
izq, der, vist;
int m=, m a y , alt, x, y, yo;
char *let[2], cad[80];
int n;
25
exito = ModoGrafO;
if (!exito)
return;
// Prepara las Cabeceras y Asigna los Limites de las Vistas.
maxx = getmaxxo + 1 ;
maxy = getmaxyo + 1 ;
izq=3*maxx/20;
der = 19 * maxx / 20;
sup[O] = maxy / 10;
inflo] = 17 * maxy / 20;
sup[l] = maxy / 10;
infIl] = 17 * maxy / 20;
let[O] = (opc=FtEAL) ? "Parte Real" : (opc=MAGN) ? "Magnitud" : "Potencia"
let[l] = (opc=FtEAL) ? "Parte Imag" : (opc=MAGN) ? "Fase" : "";
// Prepara Cada Vista y Grafica la Secuencia Correspondiente.
for (vist==O,sec=ssup;vista; vist++,sec=sinf) {
MinMax (sec, nmax, &vmin, &vmax);
// Obtiene vmin y vmax
settextjustify ( LEFT-TEXT, BOTTOM-TEXT );
outtextxy ( O,sup[vist]-5,let[vist]);
// Cabecera
settextjustify ( RIGHT-TEXT, TOP-TEXT );
sprintf (cad,"%.3g", vmax*5/255);
cad);
// Valor y maximo
outtextxy ( izq-5,sup[vist],
~printf(cad,"%d",
1);
outtextxy ( der,infIvist]+5,
cad);
// Valor x maximo
settextjustify ( RIGHT-TEXT, BOTTOM-TEXT );
sprintf (cad,"%.3g", vmin*5/255);
// Valor y minimo
outtextxy ( izq-5,infIvist], cad);
settextjustify ( LEFT-TEXT, TOP-TEXT );
outtextxy ( izq,inflvist]+5, "O" );
// Valor x minimo
escx = (float)(der-izq) / (nmax-1);
// Calculaescalas
alt = infIvist1-sup[vist];
escy = (vmax==vmin) ? (float) alt : alt / (vmax-vmin);
26
yo = (int) ( escy * (vmax-0.0) );
yo = (yo<O) ? o : (yo>&) ? alt : yo ;
yo = yo + sup[vist];
der,yo
);
line ( izq,yo,
N Calculaorigen (y=O)
/I Dibuja eje horizontal
for (n=O; n<nmax;
n++)
{
N Grafica
y = sup[vist] + (int) ( escy * (vmax-sec[n]) );
x = izq + (int) ( escx * n );
line ( X,YO, X,Y 1;
1
settextjustie ( CENTER-TEXT, BOTTOM-TEXT );
outtextxy ( maxx/2,maxy, "<ENTER> para continuar
while ( getch() != 13 );
cleardevice();
..It);
1
restorecrtmode();
1
void Listar (float ssup[], floatsfl], int nmax, int opc)
{ char *letsup, *letinf, car;
int n, nini;
int maxcol, maxlin, lin, colini;
struct text-info info;
Boo1 salir;
int ancho, anchsec, anchn;
int ptsporpant;
letsup = (opc-REAL)? "Parte Real": (opc-MAGN)?
letinf= (opc=REAL)?"ParteImag":
(opc-MAGN)?
gettextinfo (&info);
maxcol = info.screenwidth,
maxlin = info.screenheight;
anchsec = 16;
anchn = 10;
ancho = anchn + 2*anchsec + 4;
colini = (maxcol-ancho)/2 + 1;
/I El ancho es 46
clrscr();
window ( colini,1, (colini+ancho-l),maxlin );
ptsporpant = (maxlin-5) I 2;
27
"__"L
'I
'I
Magnitud
Fase
'I:
It:
Potencia It;
It.9
salir = NO;
n = O;
cprintf ("I %4u 1%13g1%13g I", n++,ssup[n],sinf[n3 );
lin = 5;
while ( n<nmax && lin < (maxlin-3) ) {
cprintf (Ir+ -------_-_
+"-+_-_-----__-_---;Iq);
cprintf("I %4u 1%13gI%13g
I", n++, ssup[n], sifln] );
lin += 2;
____________
1
cprintf (If+
+");
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
gotoxy (1 ,maxlin);
cprintf [Sliguiente,[Alnterior,[R]egresar");
while ( (car=getch())!='s' && car!='a' && car!='r' );
if (car='a')
n = nini ? nini-ptsporpant : nini ;
salir = (car=Y) ? SI :NO ;
('I
1
mientras
// Fin
textmode (BW80);
<nmax y no salir
// Restaura
pantalla
void Salvar (floatsecru, float seci[], intnmax)
{ char march[30];
FILE *arch;
Boo1 reint;
size-t nr, ni;
comt posx = 6;
comt posy = 21;
// Posicion de inicio de mensajes
// Rutina de Apertura de Archivo.
28
.-.-
l
.
.
do {
gotoxy (posx,Posy);
BorrLin (5);
printf ("Entreel nombre del archivo: .. ");
(nmarch);
gets
//nombre
Entra
archivo
eldel
arch = fopen (nmarch, "wb");
if (!arch) {
printf ("\n No fue posible abrir el archivo %s.",nmarch);
Intentar de nuevo ? (s/n) .. ");
printf (Yn
reint = Aprob();
1
} while ( !arch && reint );
// Finrutinaaperturaarchivo
(!arch)
if
{
// Si fraoaso en la apertura
gotoxy (Posx,PosY);
BorrLin (5);
printf("Secuencia no salvada. ESC para continuar
while ( getch() != ESC );
return;
// Y regresa
..I*);
1
// Escritura del Tamaiio del Arreglo y los Datos.
fwrite (&nmax, sizeoqint), 1 /*elemento*/, arch); // Escribe nmax
do {
datos
escritura
de //de
Rutina
nr = fwrite (secr, sizeof(float),nmax /*puntos*/, arch);
ni = fwrite (seci, sizeoqfloat),wax /*puntos*/, arch);
if (nr!=nmax 11 ni!=nmax){
// Si error
de
escritura
gotoxy (Posx, Posy);
BorrLin (5);
printf ("Error durantela escritura.");
Desea intentar de nuevo ? (s/n) .. ");
printf (Yn
reint = AprobO;
(reint)if
// Si reintentar
// Restauraarchivo
fseek(arch,(long)sizeof(int), SEEK-SET);
1
// Fin si error de escritura
} while ( (nr!=nmax 11 nr!=nmax) && reint );
29
// Fin escritura
fclose
(arch);
/Iarchivo
Cierra
el
if (nr!=nmax 11 ni!=nmax){
/I Sierrordeescritura
gotoxy @osx,PosY);
error
N Indica
BorrLin (5);
printf("Secuencia no salvada. ESC para continuar
..");
while ( getcho != ESC );
return;
N Y regresa
1
1
Bool Aprob (void)
{ char car;
Bool resp;
while ( (car=getchO)!='s' && car!='n' );
resp = (cF's')
? SI :NO ;
return (resp);
1
Bool ModoGraf (void)
{ int disp, errgrd,
static int modo;
modo = getgraphmode();
errgraf = graphresult();
N Si graficos no iniciados
if (errgraf= grNoInitGraph) {
disp = DETECT;
initgraph (&disp,&modo,"BGI"); /I Inicializar
errgraf = graphresult();
1
(errgraf
if
!= grOk) {
Nhay
Si
error
printf (%I Error: %s\n", grapherrormsg (errgraf));
printf
Pulse ESC para regresar..");
while ( getcho != ESC );
return (NO);
('I
1
else {
setgraphmode (modo);
return (SI);
error
/I Si no
30
void MinMax (floatsecn, int nmax, float *apmin, float *apmax)
{ float min, max;
int n;
min = sec[O];
max = sec[O];
for (n=l ;n<nmax; n++) {
if (sec[n] < min) min = sec[n];
if (sec[n] > max) max= sec[n];
1
*apmin = min;
*apmax = max;
1
InicializaModoGrafico() // Start graphics mode and draw labels
{
int rowpos;
int g-driver, g-mode, g-error;
detectgraph(&g-driver,&g-mode);
initgraph(&g-driver,&g-mode,"");
g-error = graphresulto;
if(g-erro60)
{
1
printf("Error de inicializacibn del modo gráfico
%s.\n", grapherrormsg(g-error));
exit( 1);
1
31
CONCLUSIONES
En general un sistemadigitaldeadquisicióndedatoscomoelquesedesarrollóenel
presente proyecto tiene un amplia gama de aplicaciones tanto en la industria como en la
investigación.
Específicamente la aplicación que se la dio a este sistema de adquisición de datos fuela de
un Osciloscopio Digitalusando una PC. Este Osciloscopio digitalsoporta seííales continuas
y nocontinuasenetiempo,desdeunasimpleondasenoidalhastasefialesdeaudio,
mientras estas se encuentren en los límites especificados en las consideraciones t6cnicas ya
descritas.
En esteproyectosedemostróque
un sistemadigitales
m&vershtilque
un sistema
analógico, tanto en el disefio como en sus aplicaciones, dando resultados más óptimos. Un
ejemplo de ello es el hecho deque, una vez capturada en la computadora, esta se puede
procesarsegúnserequiera,desde
guardar la informaciónen un disco,hastarealizar un
procesamiento de la sefial en un programa de procesamiento de señalesles digitales.
Sin embargo, con el desarrollo de este proyecto, se pudo comprender las limitaciones de
los equipos digitales incluyendo velocidad de respuesta, capacidad de almacenamiento en
memoria, límite de distancias en transmisiones seriales, etc. El propósito de este proyecto
eraoperarcon
una frecuenciamáxima de 10,000 H z , lo cual fueimposible dada las
velocidadesalcanzadasdurante
la transmisiónenelpuertoseriede
la PC, donde la
velocidad de transmisión m e a es de 9600 bauds. Por lo que en teoría, según el teorema
de muestreo, la frecuencia mas alta muestreable es de (9600/2) Hz, lo cual equivale a una
frecuencia de 4800 hz.
Además se observó que este sistema es muy lento para fines de tiempo real, dado el tiempo
de procesamiento de la sefial dentro de
la memoria de la PC.
32
BIBLIOGWIA DE APOYO
- DAVIOMARC
Digital Systems
Ed. Wiley, 1983.
- BREY,BARRY B.
The 2-80 microprocessor
Ed. Prentice Hall, 1988.
- BOYCE,JEFFERSON C.
Digital Computers Fundamentals
Ed. Prentice Hall, 1977.
- FAST AND LS TTL MANUAL
Motorola, 1990.
- MEMORYDATA MANUAL
Intel, 1990.
- PHERlPERALS MANUAL
Intel, 1990.
33
 0
0
Anuncio

Descargar
Anuncio
Añadir este documento a la recogida (s)
Puede agregar este documento a su colección de estudio (s)
Iniciar sesión Disponible sólo para usuarios autorizadosAñadir a este documento guardado
Puede agregar este documento a su lista guardada
Iniciar sesión Disponible sólo para usuarios autorizados