Consideraciones de diseño - Universidad de Buenos Aires
Anuncio

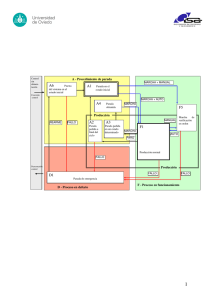
DISEÑO ESTRUCTURADO DE AUTOMATISMOS Fabiana Ferreira Laboratorio de Electrónica Industrial- Dto. de Electrónica Facultad de Ingeniería Universidad de Buenos Aires Consideraciones de diseño • La programación de automatismos se realiza , en general, teniendo en cuenta sólo el funcionamiento normal. • Sin embargo, muchas veces el sistema debe funcionar en marcha degradada, en modos de prueba , en secuencias de emergencia.,etc • Se deben diseñar tres submodelos del sistema : ! En funcionamiento normal ! En condiciones de seguridad ! En otros modos de marcha 2 1 Modos de marcha • Diversos modos del funcionamiento del sistema automatizado en diferentes condiciones • Marchas automáticas ! Modo de funcionamiento normal para el cual el sistema ha sido diseñado " Funcionamiento automático " Funcionamiento semiautomático • Marchas de intervención ! Modos de funcionamiento especial utilizados para ajustar el sistema, en la etapa de construcción o cuando una parte del sistema no esta completamente operativa (marcha degradada) 3 Marcha normal • • MARCHAS AUTOMATICAS Funcionamiento semiautomático ! Cada ciclo necesita la habilitación por parte del operador para ejecutarse ( variable de arranque de ciclo- AC) .Se pueden incluir las condiciones necesarias para el arranque de ciclo (CI) • 1 INICIO MARCHAS DE AJUSTE ! Se ejecuta sólo una etapa o conjunto de etapas ! Suele realizarse la inhibición de acciones y congelación de etapas AC.CI .~PC AC.CI Funcionamiento automático ! El sistema permanece funcionando de forma automática al arranque del ciclo ! Dos paradas : " Normal (para al final del ciclo) " De emergencia (para en la etapa que esta en ejecución) • 0 PARADA 1 INICIO 2 AC.CI 2 N FC N FC.~PC FC.PC 4 2 Tratamiento de alarmas y emergencia • Tipos de alarmas ! Locales: sólo afectan una parte del sistema ! Generales : afectan a todo el sistema. Se suceden en cadena • Tratamiento de las alarmas ! sin secuencia de emergencia : el sistema se detiene y suspende las operaciones básicas " Inhibición de acciones – Variable como condición en las acciones " Congelamiento: – variable en la condición de transición entre etapas ! Con secuencia de emergencia " En cada etapa se realiza una divergencia en OR hacia una secuencia de emergencia 5 Guía de Estudio de Modos de Marchas y Paradas ( GEMMA) • Lista de todos los estados que pueden ser necesarios para el funcionamiento de un automatismo y de las relaciones entre estos estados PZ PROCEDIMIENTOS RELATIVOS A LA PARTE DE CONTROL A D PROCEDIMIENTOS DE PARADA PROCEDIMIENTOS DE FALLA F PROCEDIMIENTOS DE FUNCIONAMIENTO 6 3 Procedimientos de funcionamiento • F1: producción normal • F2: marchas de preparación ! Estado de la instalación antes de pasar a F1 • F3: marchas de cierre ! Operaciones a seguir antes de la parada normal del proceso • F4: marchas de verificación en desorden ! Permite verificar determinados funcionamientos, sin respetar el orden del ciclo (por ej. Verificación de conexiones de actuadores) • F5: marchas de verificación bajo orden ! El pasaje de una etapa a la siguiente se realiza previa confirmación del operador • F6: marchas de test 7 Procedimientos de parada • • A1: parada en el estado inicial A2: parada solicitada a fin de ciclo ! Cuando se solicita la parada el sistema continua en funcionamiento hasta el fin del ciclo • A3: parada solicitada en un determinado estado ! Congelamiento de la situación actual. Es una parada de carácter transitorio hacia A4 • A4: parada obtenida • A5: preparación para la reposición en marcha después de una falla ! Parada en una posición distinta al estado A1 ! Operaciones necesarias para dejar al sistema operativo (desbloqueo , limpieza, etc.) • A6: Puesta de la parte operativa en el estado inicial ! Se suministra energía a la parte operativa para asegurar una referencia. Vuelve al estado A1 • A7 : Parada de urgencia ! Se pone a la parte operativa en un estado determinado para pasar a F1 8 4 Procedimientos de fallos de la parte operativa • D1:fallo en parada de urgencia ! Estado después de una parada de urgencia . Se preveen ciertos estados de los actuadores o parada de la parte de control • D2: diagnostico y tratamiento de fallas ! Estado en que el automatismo puede ser examinado despues de la falla • D3: producción degradada ! Se permite la producción con la parte del automatismo sin falla. Se bloquean las secuencias vinculadas a la falla 9 Estados de la parte de control • PZ1: puesta de la parte de control sin energía ! Corte del suministro al controlador accidental o intencional • PZ2: puesta de la parte de control en estado de marcha ! Tests de inicio del controlador . El controlador puede estar en STOP o RUN • PZ3: puesta de la parte de control fuera de estado de marcha ! La parte de control tiene suministro de energía pero no esta operativa 10 5 Bibliografía • Emilio Garcia Moreno, “Automatización de Procesos Industriales”, Alfaomega, 2001 • Ramón Piedrafita Moreno, “ Ingeniería de la automatización Industrial”, Alfaomega , 2001 11 6