( ) Vn ( ( ) Py ( ) Pz ( ) Px
Anuncio
 Vn ( ( ) Py ( ) Pz ( ) Px")
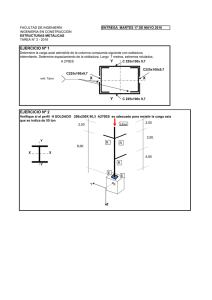
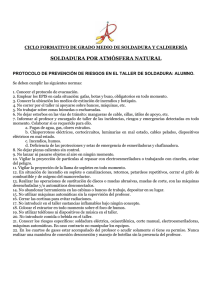
PROYECTO. Diseñar la unión al alma para resistir el 50 % de la capacidad a corte de un perfil w14x53 SOLUCIÓN PERFIL EMPLEADO 7 d 13.92 tw .37 k 1 Fyw 36 tf .66 E 29 10 Fy 36 16 3 bf 8.06 CARGA ACTUANTE POR CORTE EN EL ALMA DEL PERFIL W.- Sección G2.1a Vn Fuerza de Corte Admisible: Rav Vn h Cuando tw 2.24 E Fy Vn Fy AwCv 0.6F yAwCv Donde: Cv 1.0 1.5 h = Distancia libre entre alas menos el radio del filete o esquina Aw = Altura total por el espesor del alma = d*tw Con los datos presentes: Aw d tw 5.15 Vn 0.6F yAwCv 111.249 Vn Rav 74.166 Igual al valor copiado líneas arriba (del Manual AISC) Entonces, de acuerdo con el planteamiento del problema, la carga actuante V vale V 0.50R av 37.083 SOLDADURA "A" Primero se calcula la unión en C, aplicando la teoría general aplicada al Método Elástico: 1. Carga actuante en el espacio: Px Py Pz ex ey ez Carga trasladada al centroide Px Py Pz MyPxPzexez Pzex Pxez MzPxPy exey Pxey Pyex Mx Py Pzey ez Pyez Pzey Donde: ex b xc u b xc u d ey( d v) v 2 2. Esfuerzos Actuantes Del análisis semejante al planteado en el caso de las uniones empernadas, se tiene: Px Mz fx PxA MzIzy y A Iz Py Mz fy Py A M zIzx x A Iz Pz Mx My fz PzA MxMy IxIy xy y x A Ix Iy 3. Características Geométricas de la Sección Canal 2 d k xc( d k) ( 1 2k) 3 ( 1 2k) Iz( d k g) d d yc( d ) 3 12 2 k ( 1 k) 1 2k 2 2 g k 3 2 Iy( d k g) ( k d ) g 3 1 2k k 3 1 Ix( d k g) d g 12 2 A(d k g) d (1 2k)g 4 . APLICACIÓN AL CASO PRESENTE 4.1 Datos. Px 0kip V Py kip 18.541kip 2 Pz 0kip v 0 Se asumen las siguientes dimensiones como una primera aproximación: b 2.5in d 8in g 1in u 0.5in (u = xo) 4.2 Características de la Sección transversal Calculando las características de la sección transversal, por unidad de longitud, se tiene: k b d 0.313 2 Coordenadas del Centroide d k xc1 0.481in ( 1 2k) yc1 d 2 4in Momentos de Inercia y área 2 A 1 d ( 1 2k ) g 13in k 3 1 4 Ix1 d g 122.667in 12 2 k 3 2 4 Iy1 ( k d ) g 7.412in 3 1 2k 3 ( 1 2k) Iz1 d 3 12 2 k ( 1 k) 2 g 130.079in4 1 2k Excentricidades de la fuerza, respecto del centroide de la soldadura: d ey1 v 4in ex1 b xc1 u 2.519in 2 ez1 0in 4.3 Cargas Actuantes en el centroide de la soldadura El traslado de las componentes de P hasta el centroide de la soldadura produce las siguientes componentes de momento: V Py kip 18.541kip Px 0kip Pz 0kip 2 My1 MyPxPzex1ez1 0 Mz1 MzPxPy ex1ey1 46.71in·kip Mx1 Mx Py Pzey1ez1 0 4.4 Esfuerzos Actuantes Se verificará el esfuerzo en las cuatro esquinas de la soldadura para establecer cuál de ellas es la más esforzada. Estos puntos tienen las siguientes coordenadas. "xc1" "-(b-xc1)" C "-(b-xc1)" "xc1" "yc1" "-yc1" "-yc1" "yc1" Etiquetas: i 1 4 F 0 3 F "Pto" F i F "x" F "y" F "fy" F "fz" F "f" F "D" 0 0 "fx" 0 4 i 0 0 5 0 1 0 6 0 2 0 7 Para trabajar con la matriz debemos homogenizar las dimensiones, entonces las hacemos adimensionales. xc1 xc2 0.481 1in yc2 Mz1 Mz2 46.71 1in kip Py Py2 18.541 1kip A2 A1 2 1in 13 Iz2 Ix1 4 in yc1 1in 4 122.667 b2 b 1in 2.5 Y luego los distintos valores de coordenadas y esfuerzos, de acuerdo con la teoría anteriormente analizada. Coordenadas de los puntos más exigidos: F xc2 0.481 F b2 xc2 F yc2 4 F F 1 1 1 2 2 1 2 2 F F F F 3 1 1 2 3 2 2 1 2.019 1 2 F F F F 4 1 4 2 1 1 3 2 4 Esfuerzos en los puntos anteriores y tamaño de la soldadura necesaria "D". F fx PxA2Mz2Iz2F i 2 F fy Py2A2Mz2Iz2F i 1 F fz PzA2Mx1My1Ix1Iy1F F i 1 i 2 F F i 3 i 4 i 5 i 6 Fi32 Fi42 Fi52 F i 7 i 6 .928 Usando electrodos E70, D "Pto" 1 F 2 3 4 f .928 "x" "y" 0.481 4 1.523 1.243 0 1.966 2.019 4 1.523 2.195 0 2.672 2.019 4 1.523 2.195 0 2.672 4 1.523 1.243 0 1.966 0.481 "fx" "fy" "fz" "f" 2.119 2.879 2.879 2.119 "D" Del cuadro enterior se rescata que las dimensiones asumidas requieren soldaduras algo grandes en espesor, por tanto parece prudente incrementar las longitudes, y disminuir el tamaño de la soldadura. SOLDADURA "B" Se adopta como dato la longitud del cateto sobresaliente del angular: 1. Carga Actuante Px 0 V Py 18.541 2 Pz 0 ex c 3 ey 0 ez 0 Trasladando la carga al centroide: Mz Pxey Pyex 55.624 Mx 0 2. Características geométricas 1 3 Ix d g A d g Iy 0 12 g 1 My 0 d 8 Iz Ix c 3 x 0 Punto más esforzado: y d 2 De acuerdo con el Método Elástico: 6 Mz Px Mz fx y A Iz fx Py Mz fy x A Iz Py fy d g 2 d g Pz Mx My fz y x A Ix Iy fz 0 Sin embargo, es aceptable considerar que, en la zona de compresión, la interacción entre el alma y el angular producen un área de contacto que altera la geometría de distribución de esfuerzos, entonces, considerando que el centroide del área transformada se ubica a 1/6*d desde la zona de compresión, se realiza el siguiente análisis: T = C = 5/6*1/2*(d*g*fx) Mz = T*B B = 2/3*d*(5/6+1/6) = 2/3*d Despejando fx de la expresión de Mz se tiene: fx 3.6M z 2 3.129 fy 2.318 d g Valor que será adoptado en lo que sigue. Entonces, calculando la fuerza unitaria y despejando como antes el tamaño "D" de la soldadura: f f 2 f 2 3.894 y x Cs 0.928 D f Cs 4.196 Lo cual muestra que puede ser conveniente aumentar la longitud d=8 in