Sistemas Convencionales de Referencia
Anuncio

Sistemas Convencionales de
Referencia
Miguel Ángel Cano Villaverde
Jefe del Servicio de Programas Geodésicos
Adolfo Dalda Mourón – Coordinador de Geodesia
Centro de Observaciones Geodésicas – Instituto Geográfico Nacional
X Curso GPS en Geodesia y Cartografía. Montevideo, Uruguay, 24/05-04/06-2010
1
Introducción
•Principio relatividad de Galileo. Sistemas Inerciales
•ICRS, ICRF, ITRS, ITRF. Definiciones
•BCRS, GCRS
ICRS, ICRF, ITRS, ITRF (IERS)
•Transformaciones entre sistemas de referencia. Rigurosa
•SIRGAS.
X Curso GPS en Geodesia y Cartografía. Montevideo, Uruguay, 24/05-04/06-2010
2
Sistemas Convencionales de Referencia
Principio de Relatividad de Galileo:
Galileo
•No existe nada en reposo Æ Sist. Ref. en movimiento.
•Galileo: “Las leyes físicas son idénticas para un observador en reposo
absoluto, que para uno que se mueve con un movimiento de
traslación rectilíneo y uniforme con respecto al primero
Las leyes físicas son idénticas para dos observadores que se hayan
uno con respecto al otro en movimiento rectilíneo y uniforme
X Curso GPS en Geodesia y Cartografía. Montevideo, Uruguay, 24/05-04/06-2010
3
Sistemas Convencionales de Referencia
Un sistema de referencia que se encuentra animado de un movimiento
rectilíneo y uniforme de traslación con respecto al universo se denomina
INERCIAL.
INERCIAL
El tiempo transcurre de la misma manera
(p.e.: agujeros negros)
Las leyes físicas permanecen invariables
TEORIA DE LA RELATIVIDAD
X Curso GPS en Geodesia y Cartografía. Montevideo, Uruguay, 24/05-04/06-2010
4
Sistemas Convencionales de Referencia
Entonces:
ÆLos resultados de experimentos dependen de donde los realizamos (acel.)
ÆUn sist. de ref. en la Tierra no es inercial (mto. tras.)
ÆUn sist. de ref. en el baricentro del sist. Solar no es inercial, pero el sol
describe una órbita curva alrededor de la Galaxia
aunque de magnitud 15 millones de veces menor que la Tierra.
Un sistema de referencia centrado en el baricentro del sistema solar es el
que más se acerca a un sistema inercial.
X Curso GPS en Geodesia y Cartografía. Montevideo, Uruguay, 24/05-04/06-2010
5
Sistemas Convencionales de Referencia
Avances en precisión (VLBI, LLR, SLR y GPS )
Estudios de Astronomía, Geodesia, Geodinámica
UAI y UIGG van variando
definiciones y relaciones
de sistemas de referencia
y sus relaciones
Tenemos ahora:
1. Sistema de Referencia Celeste Internacional, fijo en el espacio
2. Sistema de Referencia Terrestre Internacional, fijo en la Tierra
3. Sistema de Referencia Intermedio de la fecha, en movimiento
4. Origen Celeste de Efemérides y al Origen Terrestre de Efemérides
X Curso GPS en Geodesia y Cartografía. Montevideo, Uruguay, 24/05-04/06-2010
6
DEFINICIONES
1. SISTEMA de Referencia Æ Estructura geométrica para referir las coordenadas de
puntos del espacio. Queda definido por la situación del origen, las direcciones de
los ejes, la escala, los algoritmos necesarios para sus transformaciones espaciales
y temporales y las constantes utilizadas en las definiciones y correcciones.
2. MARCO de Referencia Æ Materialización de un Sistema de Referencia.
Referencia Conjunto
de elementos que determinan de forma práctica un sistema de referencia y está
constituido por las coordenadas de los puntos de definición, las técnicas aplicadas
en las observaciones o medidas y los métodos de cálculo aplicados para la obtención
de los parámetros.
X Curso GPS en Geodesia y Cartografía. Montevideo, Uruguay, 24/05-04/06-2010
7
DEFINICIONES
SISTEMAS DE REFERENCIA FUNDAMENTALES
1. Sistema de Referencia Celeste (CRS) Æ se considera fijo en el espacio
2. Sistema de Referencia Terrestre (TRS) Æ se considera fijo en la Tierra
Llevan asociados sus respectivos:
Se
1. Marco de Referencia Celeste (CRF)
2. Marco de Referencia Terrestre (TRF)
en
n
fi
e
d
2
1 centrado en el baricentro
para estudio de movts
cuerpos celestes (BCRS)
1 centrado en el centro de
masas de la Tierra, geocentro,
para estudio de movts de
satélites (p.e.: NAVSTAR)
(GCRS)
para fijar las posiciones, coordenadas, de cualquier
punto de la Tierra y determinar las velocidades de éstos
X Curso GPS en Geodesia y Cartografía. Montevideo, Uruguay, 24/05-04/06-2010
8
DEFINICIONES
El BCRS Æ básico para astrometría y efemérides en el sistema solar.
Como es un sistema baricéntrico las estrellas no están sujetas a paralajes
y sus coordenadas sólo varían por movimiento propio. El tiempo junto a las
coordenadas sólo se usa para dar la época de la observación, pero
no hay tiempo o época asociada al propio sistema BCRS porque está definido
cinemáticamente. Las direcciones baricéntricas de las radiofuentes
extragalácticas no muestran rotación respecto de estos objetos,
se les supone con movimientos propios despreciables. Movto. Obj. celestes
El GCRS Æ sist. local en mvto. acelerado alrededor del baricentro
manteniendo fijas las direcciones de los ejes con respecto a radiofuentes
extragalácticas. Su orientación sigue la condición cinemática de ausencia
de rotación global de las direcciones geocéntricas de las radiofuentes.
A este sistema GCRS se refieren las observaciones hechas desde la Tierra,
(p.e. procesos dinámicos en la Tierra y su entorno) parámetros de rotación
de la Tierra (EOP) y movimientos de satélites y la Luna.
X Curso GPS en Geodesia y Cartografía. Montevideo, Uruguay, 24/05-04/06-2010
9
Sistema de Referencia Celeste Internacional
ICRS
Sist. de Ref. Celeste Ecuatorial con origen en el baricentro del sistema solar
y con los ejes en direcciones fijas respecto a radiofuentes extragalácticas.
Es el BCRS
Queda materializado por el Marco de Referencia Celeste Internacional (ICRF).
En este sistema las coordenadas esféricas se denominan simplemente
ascensión recta α
y declinación δ .
X Curso GPS en Geodesia y Cartografía. Montevideo, Uruguay, 24/05-04/06-2010
10
ICRS
Sist. de Ref. casi inercial ecuatorial.
En el se establecen las coordenadas de
las estrellas y objetos espaciales.
Origen 0 en el baricentro del sist. Solar
Ejes (OX,OY,OZ) en direcciones fijas
respecto a quasares.
Plano principal próximo al ecuador
medio J2000.0, (eje OZ perpendicular
a este plano dirigido hacia el polo CO),
Eje OX (origen de coordenadas) lo más
próxima posible al equinoccio dinámico
medio J2000.0
Eje OY formando triedro directo con los
anteriores
X Curso GPS en Geodesia y Cartografía. Montevideo, Uruguay, 24/05-04/06-2010
11
ICRS
ICRS
ICRF
Eclíptica Media
del año 2000
Polo del Ecuador
Baricentro
del sistema solar
Ecuador Medio
del año 2000
Geocentro
Equinoccio Vernal
Dirección del quasar 3C273B
X Curso GPS en Geodesia y Cartografía. Montevideo, Uruguay, 24/05-04/06-2010
12
ICRS
Ecuador/Polo del ICRS
El análisis VLBI, que permite calcular coordenadas de
radiofuentes, también provee correcciones a los modelos
convencionales de precesión y nutación de la IAU, llevando a
la estimación muy precisa del desplazamiento del polo medio
en J2000.0 relativa a su posición convencional, a la cual está
sujeta el polo del ICRS. Se puede estimar que el polo en
J2000.0 está desplazado desde el polo ICRS en 17.1 mas en la
dirección 12h y por 5.1 mas en la dirección 18h.
El polo del ICRS es consistente con el del FK5. Utilizando el
catálogo Hipparcos, que incluye todas las estrellas del FK5, se
define el polo FK5 en ICRF con una incertidumbre de una
pocos “mas”. Asumiendo que el error en la tasa de precesión
es absorbido por el movimiento propio de las estrellas, la
incertidumbre en la posición del polo FK5 relativa al polo
medio en J2000.0 se estima en ± 50 mas. El polo celeste ICRS
es consistente con el del FK5 dentro de la incertidumbre del
último.
Polo
PJ 2000.0
PFK5
- 20 mas
PICRS
6h
20 mas
σFK5 (polo)
0h
OFK5
X Curso GPS en Geodesia y Cartografía. Montevideo, Uruguay, 24/05-04/06-2010
γ 2000.0
.
OICRS
80 mas
Ecuador
13
Marco de Referencia Celeste Internacional
ICRF
• Definido por las coord. ecuatoriales J2000.0 de un conjunto de radiofuentes
extragalácticas (objetos tan alejados que sus movimientos propios se
suponen despreciables) determinadas por observaciones VLBI con
precisiones por debajo del milisegundo de arco.
• Las radiofuentes utilizadas se dividen en tres grupos:
1. Radiofuentes de definición, que deben haber sido observadas muchas
veces en un periodo de tiempo largo para asegurar su estabilidad
2. Radiofuentes candidatas,
candidatas que no tienen muchas observaciones o están
observadas en cortos periodos de tiempo
3. Otras radiofuentes,
radiofuentes que tienen sus coordenadas no muy bien determinadas
pero son útiles para relacionar diferentes marcos de referencia
X Curso GPS en Geodesia y Cartografía. Montevideo, Uruguay, 24/05-04/06-2010
14
ICRF
En 1995 se usaron
•212 radiofuentes de definición
•294 candidatas
•102 objetos radio
total 608 radiofuentes (+ en Norte)
X Curso GPS en Geodesia y Cartografía. Montevideo, Uruguay, 24/05-04/06-2010
15
Sistema de Referencia Terrestre Internacional
ITRS
•Un Sistema de Referencia Terrestre (TRS) Æ sist. de referencia espacial en
rotación con la Tierra en su movimiento diurno.
coordenadas de los ptos. de superficie sólo tendrán pequeñas variaciones
temporales debidas a efectos geofísicos
•Un Marco de Referencia Terrestre (TRF) Æ conjunto de puntos
materializados en la superficie de la Tierra con coordenadas perfectamente
determinadas en un sistema de coordenadas dado, cartesianas o
geográficas, conectado a un TRS
IGUAL QUE EN EL CASO DEL CTRS:
Un Sistema de Referencia Terrestre Convencional (CTRS) es el conjunto de todas las convenciones, algoritmos
y constantes que definen un TRS dando el origen, la orientación y la escala del sistema y su evolución temporal.
Un Marco de Referencia Terrestre Convencional (CTRF) es la materialización física del CTRS, es decir el conjunto
de puntos físicos con coordenadas perfectamente determinadas por técnicas geodésicas espaciales en un
CTRS específico.
X Curso GPS en Geodesia y Cartografía. Montevideo, Uruguay, 24/05-04/06-2010
16
Sistema de Referencia Terrestre Internacional
ITRS
El Sistema de Referencia Terrestre Internacional (ITRS) es el
CTRS proporcionado por el IERS que es la institución encargada de
definir, determinar y promocionar el ITRS
0 Æ centro de masas de la Tierra
incluyendo océanos y atmósfera
plano principal Æ plano del ecuador terrestre
de polo Ro (cerca del de rotación)
Eje Oz Æ perpendicular al plano principal
Eje Ox Æ origen de longitudes, punto en el
ecuador de Ro
Eje Oy Æ forma triedro directo
X Curso GPS en Geodesia y Cartografía. Montevideo, Uruguay, 24/05-04/06-2010
17
Marco de Referencia Terrestre Internacional
ITRF
•El ITRF viene determinado por una combinación de coordenadas y
velocidades de una red de estaciones en la superficie de la Tierra calculadas
por diversos centros de análisis utilizando observaciones espaciales
VLBI, SLR, LLR, GPS, y DORIS
•La posición de un punto sobre la superficie de la Tierra varía (mareas,
carga oceánica, deshielo glacial, efectos sísmicos o volcánicos, etc…)
X (t ) = X R (t ) + ∑ ΔX i (t )
i
ΔX i Correcciones por
variaciones
dX
X R (t ) = X 0 +
(t − t 0 ) Posición regularizada
dt
dX
Siendo X0 y t0 coordenadas iniciales y tiempo y dt las variaciones
X Curso GPS en Geodesia y Cartografía. Montevideo, Uruguay, 24/05-04/06-2010
18
Marco de Referencia Terrestre Internacional
ITRF
Entonces:
X (t ) = X 0 +
dX
(t − t 0 ) + ∑ Δ X i (t )
dt
i
La determinación del ITRF está afectada por los siguientes factores:
a) relaciones entre el ICRS y el ITRS (velocidad de rotación de la Tierra)
b) coordenadas a priori de estaciones,
c) el modelo de tectónica de placas utilizado
d) el modelo de geopotencial adoptado,
e) la constante gravitación y la masa de la Tierra,
f) el valor de la velocidad de la luz,
g) las mareas terrestres y oceánicas,
h) la presión de radiación solar,
i) el estado y marcha de los relojes,
j) los efectos atmosféricos,
k) las variaciones de las antenas de los receptores, etc.
X Curso GPS en Geodesia y Cartografía. Montevideo, Uruguay, 24/05-04/06-2010
19
IERS Æ ITRFyy
El ITRF producido por el IERS se nombra ITRFyy,
ITRFyy donde yy indica
el último año cuyos datos fueron usados en la formación del ITRF
(ITRF97 Æ creado en 1999 con datos disponibles hasta finales de 1997)
Historia:
ITRF comienza en 1984 con una solución llamada BTS84 realizada por
el BIH usando una combinación de observaciones VLBI, LLR, SLR y
Doppler/TRANSIT. Realizó tres más hasta 1987 Æ BTS87
Después se encarga el IERS creado en 1988 por la UIGG y la UAI.
Hasta la fecha existen 11 versiones del ITRF publicadas por el IERS:
ITRF88, 89, 90, 91, 92, 94, 96, 97, combinada 96+97, IRTF2000 y
ITRF2005
X Curso GPS en Geodesia y Cartografía. Montevideo, Uruguay, 24/05-04/06-2010
20
IERS Æ ITRFyy
Desde el ITRF88 al ITRF93 se mantuvo el datum de definición de la época 1988.0,
para el 94 y 96 la de 1993.0, para 96-97 y 2000 la de 1997.0,y finalmente, para
ITRF2005 la época 2000.0
En el ITRF88 se incluyeron 100 estaciones y 22 colocalizaciones (VLBI/SLR/LLR) y en
el ITRF2000 se llega a 800 estaciones en 500 sitios con 101 localizaciones.
El ITRF2005 refleja la calidad
actual de las técnicas espaciales
X Curso GPS en Geodesia y Cartografía. Montevideo, Uruguay, 24/05-04/06-2010
21
IERS Æ ITRFyy
•La relación entre dos sistemas ITRS viene dada generalmente por una
transformación de Helmert de 7 parámetros (3 traslaciones, 3 rotaciones y
1 cambio de escala) más otros 7 de sus variaciones temporales. Los
proporciona el IERS
•Así, los parámetros que publica el IERS son:
------------------------------------------------------------------------------------SOLUTION
T1
T2
T3
D
R1
R2
R3
EPOCH
Ref.
UNITS----------> cm
cm
cm
ppb
.001"
.001"
.001"
IERS Tech.
.
.
.
.
.
.
.
Note #
RATES
T1
T2
T3
D
R1
R2
R3
UNITS----------> cm/y cm/y cm/y ppb/y .001"/y .001"/y .001"/y
------------------------------------------------------------------------------------ITRF97
0.67 0.61 -1.85
1.55
0.00
0.00
0.00
1997.0
27
rates
0.00 -0.06 -0.14
0.01
0.00
0.00
0.02
ITRF96
0.67 0.61 -1.85
1.55
0.00
0.00
0.00
1997.0
24
rates
0.00 -0.06 -0.14
0.01
0.00
0.00
0.02
ITRF94
0.67 0.61 -1.85
1.55
0.00
0.00
0.00
1997.0
20
rates
0.00 -0.06 -0.14
0.01
0.00
0.00
0.02
ITRF93
1.27 0.65 -2.09
1.95
-0.39
0.80
-1.14
1988.0
18
rates -0.29 -0.02 -0.06
0.01
-0.11
-0.19
0.07
ITRF92
1.47 1.35 -1.39
0.75
0.00
0.00
-0.18
1988.0
15
rates
0.00 -0.06 -0.14
0.01
0.00
0.00
0.02
ITRF91
2.67 2.75 -1.99
2.15
0.00
0.00
-0.18
1988.0
12
rates
0.00 -0.06 -0.14
0.01
0.00
0.00
0.02
ITRF90
2.47 2.35 -3.59
2.45
0.00
0.00
-0.18
1988.0
9
rates
0.00 -0.06 -0.14
0.01
0.00
0.00
0.02
ITRF89
2.97 4.75 -7.39
5.85
0.00
0.00
-0.18
1988.0
6
rates
0.00 -0.06 -0.14
0.01
0.00
0.00
0.02
ITRF88
2.47 1.15 -9.79
8.95
0.10
0.00
-0.18
1988.0 IERS An. Rep.
rates
0.00 -0.06 -0.14
0.01
0.00
0.00
0.02
for 1988
Parámetros para pasar
ITRF2000 a ITRF’s
anteriores
X Curso GPS en Geodesia y Cartografía. Montevideo, Uruguay, 24/05-04/06-2010
22
IERS Æ ITRFyy
Parámetros para pasar de ITRF2005 a ITRF2000
X Curso GPS en Geodesia y Cartografía. Montevideo, Uruguay, 24/05-04/06-2010
23
IERS Æ ITRFyy
•Y podemos pasar de unos a otros con la fórmula:
⎛ XS
⎜
⎜ YS
⎜ ZS
⎝
⎞ ⎛ X ⎞ ⎛ T1 ⎞ ⎛ D
⎟ ⎜
⎟ ⎜ ⎟ ⎜
+
=
Y
T
2
⎟ + ⎜ R3
⎟ ⎜ ⎟ ⎜
⎟ ⎜ Z ⎟ ⎜T 3⎟ ⎜ − R2
⎠ ⎝
⎠ ⎝ ⎠ ⎝
− R3
D
R1
R2 ⎞ ⎛ X
⎟ ⎜
− R1 ⎟ ⋅ ⎜ Y
D ⎟⎠ ⎜⎝ Z
⎞
⎟
⎟
⎟
⎠
XS,YS,ZS coord. En ITRFyy
X,Y,Z coord. en ITRF2000
•Si queremos transformar a una época diferente de la que aparece en las
Tablas, variamos los parámetros con las velocidades de la tabla,
tabla siendo el
valor de un parámetro en una época:
•
p (T ) = p (época) + p (T − época)
Y se vuelven a utilizar las fórmulas anteriores
X Curso GPS en Geodesia y Cartografía. Montevideo, Uruguay, 24/05-04/06-2010
24
Transformaciones entre GCRS
datum geodésico Æ superficie referencia
elipsoide de revolución elegido
con origen orientación y escala
definidas por un MARCO de ref. geoc.
Podemos dar coord. X,Y,Z o ϕ,λ,h
no varían salvo movto. tectónico
El concepto moderno es el contrario: marco fijo al manto terrestre
mientras las placas se rotan a su posición original en la época tD
(la época del datum).
•Los puntos son movidos hacia atrás a su localización en la época tD
en el marco ITRFyy que por su definición es fijo.
•La placa y los puntos sobre ésta están congelados en el espacio en
la época en la que el datum fue definido
X Curso GPS en Geodesia y Cartografía. Montevideo, Uruguay, 24/05-04/06-2010
25
Transformaciones entre GCRS
Consideraciones FUNDAMENTALES
–Para realizar una transformación entre sistemas terrestres geocéntricos
debemos considerar que los dos marcos estén en la misma época (para
considerar el desplazamiento de estaciones por al movimiento de placas)
–Puntos en el marco ITRFyy, época t0 (donde yy denota la solución elegida)
siempre tienen asociado un campo de velocidad para cada punto, siendo sus
velocidades lineales Vx, Vy, Vz).
–Transformación entre ITRFyy, época t0 a ITRFzz, época t:
X ITRFZZ = TX + (1 + s) ⋅ ( R + I ) ⋅ ( X ITRFYY + V X ITRFYY ⋅ (t − t 0 ))
siendo X ITRF las coord. finales, TX vect. traslación, s la escala, R la matriz de
rotación, I la matriz identidad, X ITRF y VX ITRF coord. Y vel. Iniciales y (t − t0 )
la diferencia temporal de los dos sistemas.
ZZ
YY
YY
X Curso GPS en Geodesia y Cartografía. Montevideo, Uruguay, 24/05-04/06-2010
26
Transformación RIGUROSA
Definimos paso de ITRF00(tD) donde tD denota la época asociada
al datum ITRFyy(tD)
Ahora la ecuación es (misma época tD):
⎡ 1
⎧ x ' ⎫ ⎧Tx ⎫
⎢
⎪ ⎪ ⎪ ⎪
⎨ y '⎬ = ⎨Ty ⎬ + (1 + s) ⎢ −ε z
⎪ z ' ⎪ ⎪T ⎪
⎢ εy
⎩ ⎭B ⎩ z ⎭
⎣
εz
1
−ε x
−ε y ⎤ ⎧ x ⎫
⎥⎪ ⎪
ε x ⎥ ⎨ y⎬
1 ⎥⎦ ⎪⎩ z ⎪⎭ A
En nuestro caso:
{x (t D )}ITRFyy = {Tx } + (1 + s )[δ R ]{x(t D )}ITRF 00
↔ {x '}B = {Tx } + (1 + s)[δ R ]{x}A
⎡ 0
⎢
[δℜ] = [ I ] + [ε ]t = [ I ] + ⎢ −ε z
⎢ εy
⎣
¡¡Ojo, sentido antihorario!!
X Curso GPS en Geodesia y Cartografía. Montevideo, Uruguay, 24/05-04/06-2010
εz
0
−ε x
−ε y ⎤
⎥
εx ⎥
0 ⎥⎦
27
Transformación RIGUROSA
{x (t D )}ITRFyy = {Tx } + (1 + s )[δ R ]{x(t D )}ITRF 00
Asumamos: coordenadas en el ITRF00 se están moviendo a cierta velocidad
respecto al marco (fijo) Æ conocemos veloc. y las coord. en una época t.
En este caso, la transformación de Helmert quedaría como
{x(t D )}ITRFyy = {Tx } + (1 + s)[δ R ]{x(t ) + (tD − t ) {v X }ITRF 00 }
Asumamos: parámetros de Helmert varían en el tiempo y que son dados
en una determinada época tk generalmente distinta de la época tD
{Tx } ≡ {Tx (t D )} = {Tx (tk )} + (t D − tk ){T&x }
t
[ε ]t ≡ [ε (t D )]t = [ε (tk )]t + (t D − tk )[ε& ]
s ≡ s (t D ) = s (tk ) + (t D − tk ) s&
p.ej:
⎡ 0
⎢
[ε&]t =
= ⎢ −ε&z
∂t
⎢ ε&y
⎣
∂[ε ]t
ε&z
0
−ε&x
X Curso GPS en Geodesia y Cartografía. Montevideo, Uruguay, 24/05-04/06-2010
−ε&y ⎤
⎥
ε&x ⎥
0 ⎥⎦
28
Transformación RIGUROSA
Obtenemos la transformación rigurosa
{x(tD )}ITRFyy = {Tx (tk )} + (tD − tk ){T&x } +
(
)
t
t
+ ⎡(1 + s(tk )) [δ R ] + (tD − tk ) × (1 + s(tk )) [ε&] + s&[δ R ] + (tD − tk )2 s& [ε&] ⎤
⎣
⎦
× ({x(t )}ITRF 00 + (tD − tk ){vx (t )}ITRF 00 )
Sentido de rotaciones antihorario, pero si se aplican rotaciones de cuerpo
(rotación de vectores) como en el caso de la tectónica de placas,
la matriz antisimétrica de rotación tiene los signos opuestos.
En este caso particular los ejes del marco permanecen fijos mientras los
vectores de posición (coordenadas) son rotados en sentido antihorario.
Esta rotación es denominada " rotación de Euler " o " rotación activa "
X Curso GPS en Geodesia y Cartografía. Montevideo, Uruguay, 24/05-04/06-2010
29
Transformación RIGUROSA
z
z’
εz
v
z
v
v
z’
y’
vy
’
ε
v
y
y
Rotación
ejes
⎡ 0
⎢
⎢ −ε z
⎢ εy
⎣
Rotación
vectores
⎡ 0
⎢ Ω&
⎢ z
⎢⎣ −Ω& y
y
εz
0
−ε x
−ε y ⎤
⎥
ε x ⎥ = [ε ]t
0 ⎥⎦
rotaciones de ejes
⎧
⎪
⎨contrarias a las agujas del reloj
⎪
positivas
⎩
& ⎤
Ω
y
⎥
&]
&
− Ω x = [Ω
rotaciones de puntos
⎧
⎪
⎨contrarias a las agujas del reloj
⎪
positivas
⎩
v
ε
x
vx
x
’
x’
x
z
Vz
Ω
z
|Ω|~π
Vz
’
Ω
V
V’
Ø
V
Ω
y
y
Vy
’
&
−Ω
z
0
&
Ω
x
⎥
0 ⎥⎦
y
λ
Vx
Ω’
V x
x
x
X Curso GPS en Geodesia y Cartografía. Montevideo, Uruguay, 24/05-04/06-2010
30
Transformación RIGUROSA
Donde la velocidad de un determinado punto dadas las componentes
de la velocidad angular de la placa tectónica sería:
⎡
⎢ 0
⋅
⎢ ⋅
⎡ ⎤
{v x } = ⎢Ω⎥{x} = ⎢ Ω z
⎢ ⋅
⎣⎢ ⎦⎥
⎢− Ω y
⎢⎣
⋅
⋅
⋅
−Ωz
⋅
0
Ωx
⎤
Ωy ⎥
⎧x⎫
⋅
⎥⎪ ⎪
− Ω x ⎥⎨ y⎬
⎥⎪ ⎪
0 ⎥⎩ z ⎭
⎥⎦
⋅
⋅
siendo Ω x , Ω y , Ω z las componentes de la velocidad angular de la placa
El resumen de las épocas
tD: época del datum
tk: época de los parámetros
t: época de un instante de observación
X Curso GPS en Geodesia y Cartografía. Montevideo, Uruguay, 24/05-04/06-2010
31
Transformación RIGUROSA
X Curso GPS en Geodesia y Cartografía. Montevideo, Uruguay, 24/05-04/06-2010
32
(SIRGAS)
Sistema de Referencia Geocéntrico para Las Américas
Originalmente Sistema de Referencia Geocéntrico para América del Sur
El proyecto SIRGAS fue establecido durante la Conferencia Internacional
de la Definición de un Datum Geocéntrico para Sudamérica, en octubre de
1993 en Asunción, Paraguay, por invitación de la Asociación Internacional de
Geodesia (IAG), el Instituto Panamericano de Geografía e Historia (PAIGH) y
la National Imagery and Mapping Agency (NIMA), en aquel entonces, United
States Defense Mapping Agency (DMA).
Representantes de cada entidad y la mayoría de países de Sudamérica
participaron y crearon el Comité SIRGAS y el Consejo Científico.
X Curso GPS en Geodesia y Cartografía. Montevideo, Uruguay, 24/05-04/06-2010
33
(SIRGAS)
SIRGAS es, por tanto, la densificación del ITRF en América, conformado
actualmente por una red de más de 180 estaciones (aunque sólo algunas
como
estaciones
permanentes),
cuya
distribución
es
regularmente
homogénea sobre el continente.
Los objetivos que se establecieron para el proyecto fueron:
•Definir un Sistema de Referencia para Sudamérica.
•Establecer y mantener una red de referencia para
establecer y definir un datum geocéntrico.
Estos objetivos del sistema de referencia para el continente fueron asumidos
en la Conferencia de Asunción con los condicionantes:
•Sistema de Referencia SIRGAS: International Terrestrial Reference Frame
(ITRF).
• Datum geocéntrico: ejes de coordenadas datos por el Sistema de
Referencia SIRGAS y parámetros del elipsoide GRS80, orientado según los
ejes coordenados equivalente al ITRF (SIRGAS 1997).
X Curso GPS en Geodesia y Cartografía. Montevideo, Uruguay, 24/05-04/06-2010
34
(SIRGAS)
Se establecieron tres grupos de trabajo con vistas a cumplir los
objetivos:
¾
Grupo I: Sistemas de Referencia
¾
Grupo II: Datum Geocéntrico
¾
Grupo III: Datum Vertical
Al principio SIRGAS fue restringido a América del Sur y el Sistema de
Referencia fue realizado con 58 estaciones observadas por una campaña
de GPS en 1995. Las coordenadas finales estaban en ITRF94 (época
1995.4) y los ajustes fueron realizados por el Deutsches Geodädisches
Forschungsinstitut (DGFI) y el NIMA, siendo aprobados y presentados en
la Asamblea del IAG en Rio de Janeiro, 1997.
El datum geocéntrico está realizado sobre las redes observadas con GPS
por los diferentes países y conectados con las redes de triangulación
existentes, densificaciones de SIRGAS.
X Curso GPS en Geodesia y Cartografía. Montevideo, Uruguay, 24/05-04/06-2010
35
(SIRGAS)
El datum vertical está definido por estaciones mareográficas (para
cada país) y observadas con GPS junto con otras señales con nivelación.
Para este propósito se llevó a cabo una campaña en mayo de 2000 para
observar todos los mareógrafos y algunas estaciones que conforman el
marco de referencia vertical.
Esta campaña también fue la repetición de las mediciones hechas sobre
el Marco de Referencia Geocéntrico SIRGAS e incluyó el resto de
América, desde los países de América del Sur y nuevos puntos de
América Central, Estados Unidos y Canadá (SIRGAS 2002). El resultado
fue una red conformada por 184 estaciones con coordenadas calculadas
en el ITRF2000, época 2000.4.
Una red de estaciones permanentes GPS proporciona también datos al
IGS y son procesadas semanalmente por el RNAAC-SIRGAS, que es una
densificación regional de la red global IGS. Incluye preferentemente
estaciones de observación continua, pero también incluye la ocupación
periódica de las estaciones pasivas de SIRGAS, proporcionando campos
de velocidades de las estaciones.
X Curso GPS en Geodesia y Cartografía. Montevideo, Uruguay, 24/05-04/06-2010
36
X Curso GPS en Geodesia y Cartografía. Montevideo, Uruguay, 24/05-04/06-2010
37
X Curso GPS en Geodesia y Cartografía. Montevideo, Uruguay, 24/05-04/06-2010
38
(SIRGAS)
La realización (materialización) de SIRGAS se adelantó inicialmente,
mediante dos campañas GPS, la primera en 1995 (SIRGAS95) con 58 estaciones y,
la segunda en 2000 (SIRGAS2000) con 184 estaciones.
Actualmente, SIRGAS está materializado por una red de estaciones GNSS de
funcionamiento continuo con coordenadas de alta precisión (asociadas a una
época específica de referencia) y sus cambios a través del tiempo (velocidades).
La red SIRGAS de funcionamiento continuo (SIRGAS-CON) está compuesta en
la actualidad por cerca de 170 estaciones, de las cuales 50 pertenecen a la red
global del IGS.
La operabilidad de SIRGAS-CON se fundamenta en la contribución voluntaria
de más de 50 entidades latinoamericanas, que han instalado las estaciones y
se ocupan de su operación adecuada para, posteriormente, poner a disposición
de los centros de análisis la información observada.
X Curso GPS en Geodesia y Cartografía. Montevideo, Uruguay, 24/05-04/06-2010
39
(SIRGAS)
Dado que los países latinoamericanos están mejorando sus marcos geodésicos de
referencia mediante la instalación de un número mayor de estaciones GNSS de
operación continua y, teniendo presente que dichas estaciones deben ser
integradas consistentemente en el marco de referencia continental, la red SIRGASCON comprende dos niveles de clasificación:
1.
Una red de cobertura continental (SIRGAS-CON-C), densificación del ITRF en
Latinoamérica, con estaciones estables, de funcionamiento óptimo, que
garantizan consistencia, perdurabilidad y precisión del marco de referencia a
través del tiempo.
2.
Redes de densificación (SIRGAS-CON-D) que incluyen las estaciones de
referencia no contenidas en la red continental. Actualmente existen tres redes
SIRGAS-CON-D (una norte, una central y una sur), pero el objetivo a mediano
plazo es que existan tantas como países miembros de SIRGAS, pues dichas
redes equivalen a los marcos nacionales de referencia.
X Curso GPS en Geodesia y Cartografía. Montevideo, Uruguay, 24/05-04/06-2010
40
(SIRGAS)
SIRGAS-CON-C
X Curso GPS en Geodesia y Cartografía. Montevideo, Uruguay, 24/05-04/06-2010
41
(SIRGAS)
SIRGAS-CON-D
SUR
SIRGAS-CON-D
NORTE
SIRGAS-CON-D
CENTRAL
X Curso GPS en Geodesia y Cartografía. Montevideo, Uruguay, 24/05-04/06-2010
42
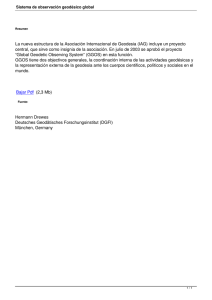
El Modelo de Velocidades SIRGAS (VEMOS)
ha sido calculado a partir de las coordenadas
SIRGAS95 y SIRGAS2000, de las velocidades
de las estaciones SIRGAS-CON determinadas
por el IGS-RNAAC-SIR y de diferentes proyectos
geodinámicos desarrollados en la región
(Drewes and Heidbach 2005).
Dado que la precisión de las coordenadas
reducidas en el tiempo depende directamente
de la confiabilidad de este modelo, su
cualificación permanente también es un objetivo
central de SIRGAS.
X Curso GPS en Geodesia y Cartografía. Montevideo, Uruguay, 24/05-04/06-2010
43