vigas de pared delgada - Calculo Estructural II (IM-IME)
Anuncio
")
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
Capítulo 10
VIGAS DE PARED DELGADA
1 INTRODUCCIÓN
Este capítulo está dedicado al estudio de vigas de pared delgada. El objetivo es determinar las
tensiones y las deformaciones, en especial las tensiones de corte originadas en el momento torsor y
los esfuerzos de corte.
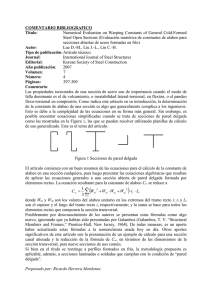
A modo de ejemplo se considera una viga de pared delgada abierta de forma arbitraria cuya
sección plana se muestra en la Figura 1.
Primero se procede a determinar las propiedades de la sección: i) área (A), ii) ubicación del
centro de gravedad (punto G), iii ) momentos de inercia y producto de inercia, iv) ejes principales
de inercia (Iy e Iz ) que se interceptan en el centro de gravedad de la sección (ejes “y” y “z” ) y
v) ubicación del centro de corte (punto C ).
A continuación se determinan los esfuerzos que solicitan a la sección plana:
i) el esfuerzo normal N y los momentos flectores M y y M z que pasan por el centro de gravedad G.
ii ) el momento torsor T y los esfuerzos de corte Qy y Qz que pasan por el centro de corte C.
Figura 1: Esfuerzos en una sección de pared delgada y tensión normal en un punto genérico
Una vez determinadas las propiedades de la sección plana y los esfuerzos actuantes podemos
calcular las tensiones. Las tensiones normales en un punto genérico ( punto A) de la sección,
definido por las coordenadas ( yA y zA ) respecto a los ejes principales de inercia, se calculan por la
“fórmula de la flexión compuesta” que es totalmente general,
My
Mz
N
+
zA −
yA
A
Iy
Iz
(σ x ) A =
(1)
siendo aplicable a todo tipo de secciones: llenas, de pared delgada (abiertas o cerradas), y también
de pared gruesa, sean ellas simétricas o no.
Las tensiones de corte en un punto genérico tal como el A dependen del momento torsor ( T )
que se calcula tomando momentos respecto al centro de corte y de los esfuerzos cortantes (Qy y Qz )
que tienen la dirección de los ejes principales de inercia pero pasan por el centro de corte.
Nos preguntamos: ¿Existe una fórmula totalmente general, para calcular las tensiones de corte?
=
τA
=
f ( T , Qy , Qz , y A , z A )
?
(2)
Lamentablemente la respuesta es no, en cada caso se deben tener en cuenta las particularidades
de la sección considerada. En algunos casos como en las secciones circulares se conoce la solución
general, en otras secciones llenas (rectángulo, elipse, triángulo, hexágono, etc.) se tiene una fórmula
para determinar la tensión de corte máxima pero no se dispone de una expresión para determinar la
tensión de corte en un punto genérico en función de sus coordenadas.
169
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
En este capítulo se derivan fórmulas para las tensiones de corte de secciones cerradas y abiertas
de pared muy delgada, que pueden tener o no ejes o centros de simetría. En el Anexo al final de este
capítulo se resumen las fórmulas para calcular la tensión de corte máxima y el módulo torsional de
diversos tipos de secciones.
Finalizamos esta introducción anticipando que a lo largo de este capítulo se demuestra que en
ciertos casos de vigas de pared delgada, el momento torsor T produce tensiones normales denominadas
“tensiones secundarias” que se agregan a las provocadas por el esfuerzo axial y la flexión considerados
en (1) que se modifica como se indica en (3)
My
Mz
N
σA = +
zA −
y A + σ (T , s , β )
A
Iy
Iz
(3)
donde ‘s’ es una coordenada curvilínea que recorre la línea media del espesor del contorno de la
sección plana de pared delgada y ‘β ’ es el giro por unidad de longitud de viga correspondiente a la
sección considerada, que está definida por la coordenada axial x indicada en la Figura 1.
2 TORSIÓN DE UNA SECCIÓN CERRADA UNICELULAR DE PARED DELGADA
Nos referiremos a un perfil de pared delgada como el de la Figura 2-a. El espesor puede ser
variable pero debe ser muy pequeño en comparación con el perímetro y sin cambios bruscos porque en
ese caso se produce concentración de tensiones. El espesor, t, y las tensiones de corte, τ, no varían
en el sentido axial (eje x).
Figura 2: Determinación del flujo de corte en una sección de pared delgada unicelular
Se aísla un elemento, digamos el ABCD, como se muestra en la Figura 2-b y se plantea el
equilibrio de fuerzas en el sentido x teniendo en cuenta la reciprocidad de las tensiones tangenciales y
el hecho de que los puntos A y C son arbitrarios. Se observa que el producto de τ por t es constante en
todo el perímetro del perfil. El producto ( τ t ) se denomina “flujo de corte”.
τ=
τ 2 t2 dL
1 t1 dL
→=
τ 1 t1 =
τ 2 t2
→
cte
q =τ t
(4)
Para calcular el momento torsor se integra a lo largo del perímetro el momento infinitesimal
que el flujo de corte produce respecto a un punto arbitrario P como se muestra en la Figura 2-c.
=
T
=
∫ r ( q ds )
q
∫ r ds
(5)
Notar que el flujo q se ha sacado fuera de la integral por ser constante a lo largo de todo el
perímetro. La integral debe efectuarse a lo largo de la línea media y tiene una interpretación
geométrica muy simple. En efecto, ( rds ) es el doble del área del triángulo de base (ds) y altura ( r ).
=
∫ r ds
2Γ
→
T = 2 qΓ
(6)
Notar que el área Γ no es el área A de la sección recta, sino, el área encerrada por la línea
media del perímetro (normalmente Γ >> A) .
La tensión de corte por torsión en la sección cerrada de pared delgada depende del espesor:
τ = T / (2 Γ t )
Reemplazando (4) en (6) y despejando:
170
(7)
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
El giro por unidad de longitud ( β = dθ/dx ) puede obtenerse por un simple planteo energético.
El trabajo realizado por el momento torsor T es:
donde: θ
We ½
Tθ
=
=
βL
(8)
Cuando actúa solamente la tensión de corte, la energía por unidad de volumen “w ”, dada en la
ecuación (123) del Capítulo 1 se reduce a una expresión sencilla que se puede integrar en el
volumen (dV = Lt ds ) para calcular la energía interna de deformación elástica Wi .
τ2
w = ½τ γ = ½
G
Igualando We con Wi
τ2
dV → Wi =
→ Wi = ∫ w dV = ∫ ½
G
τ2
½ TβL = ∫ ½
( Lt ds )
G
τ2
∫ ½ G Lt ds
(9)
(10)
Se puede despejar β. Reemplazando (4) y (6) en (10) se puede expresar β de dos maneras según
convenga en función del momento torsor T o del flujo de corte q:
β=
q
2 GΓ
∫
ds
t
β=
(11)-a
T
4 GΓ 2
∫
ds
t
(11)
(11)-b
Las ecuaciones (6) y (11) son conocidas como fórmulas de Bredt, quien las dedujo en 1896.
Notar que son fórmulas aproximadas válidas para espesor t muy pequeño. Como en general los
espesores de las vigas de pared delgada no son muy pequeños el error no es insignificante. A modo
de ejemplo, si la fórmula (6) se aplica a un tubo circular cuyo espesor es igual al 20 % del radio
medio, la tensión máxima calculada es un 8 % inferior al verdadero valor. En ese mismo ejemplo el
giro por unidad de longitud β calculado con (11) tiene un 1% de error en exceso.
Teniendo en cuenta la ley de Hooke podemos expresar el giro por unidad de longitud como
θ =
TL
G JR
(12)-a
→
β =
T
G JR
(12)
(12)-b
donde el producto (G JR ) es la rigidez a la torsión de la sección. Al comparar la ecuación (12)-b con
la (11)-b se obtiene la fórmula (13)-a para calcular el módulo torsional JR de una sección cerrada de
pared delgada que es el equivalente al momento de inercia polar de una sección circular.
JR =
4Γ 2
ds
∫ t
(13)-a
4Γ 2 t
si t es constante → J R =
perímetro (13)-b
(13)
donde se observa que el módulo torsional de secciones cerradas crece con el cuadrado del área
encerrada Γ y sólo linealmente con el espesor t.
En el caso de una sección cerrada con aletas se suman las contribuciones
de esos elementos
4Γ2
3
=
JR
+ ∑ ∫ ⅓ ( ti ) dsi
(14)
∫ ( ds / t )
(
)
Es muy importante destacar la gran diferencia entre el módulo torsional de una sección cerrada y
otra similar abierta. A modo de ejemplo se sugiere al lector verificar que el tubo soldado (cerrado)
de la Figura 3-b tiene una rigidez ( G JR ) que es 300 veces la rigidez del mismo tubo sin soldar de la
Figura 3-a. Asimismo puede verificarse que la tensión máxima en la sección abierta es 30 veces el
valor de la sección similar pero cerrada.
J R cerrada
=
J R abierta
2
rm
3=
t
300
τ max abierta
rm
= 3=
30
τ max cerrada
t
Figura 3: Comparación entre dos secciones aparentemente similares: a) abierta, b) cerrada
171
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
3 TORSIÓN DE SECCIONES CON VARIAS CÉLULAS
Las secciones cerradas multicelulares de pared delgada son de uso frecuente en ingeniería
naval, mecánica y aeronáutica. Su análisis es una simple generalización de los resultados obtenidos
por Bredt para una sección cerrada (unicelular ).
Analizaremos una sección de dos células del tipo de la Figura 4, pero los resultados pueden
generalizarse al caso de n células. Se considera que en la célula 1 actúa el flujo de corte q1 y que en
la célula 2 actúa el flujo q2, mientras que en el tabique interior se superponen ambos flujos.
Figura 4: Sección cerrada de pared delgada de dos células
Repitiendo un razonamiento similar al que permitió deducir (4) se puede probar que
q=
q1 − q 2
3
(15)
esto permite tratar los flujos de corte en las células como corrientes en las mallas de circuitos eléctricos.
Suponiendo que las secciones planas no se distorsionan en su plano (teoría de Saint Venant )
se puede anticipar que todas las células giran lo mismo, de esa manera según (11) se tiene:
qi
1
=
ds i 1, 2, n
∫
ti
2 GΓ i
=
β β 1 = β 2 ...= β=
donde: β i
n
(16)
El momento torsor total se obtiene como suma de la contribución de todos los tramos.
Considerando la sección de dos células de la Figura 4-a se tiene
=
T
∫
ABC
q1 r ds + ∫
CDA
q 2 r ds + ∫
CA
(q
1
− q 2 ) r ds
2 ( q1 Γ 1 + q2 Γ 2 )
= q1 2 ( Γ 1 + Γ 3 ) + q2 2 ( Γ 2 − Γ 3 ) − ( q1 − q2 ) 2Γ=
3
(17)
n
T = 2 ∑ qi Γ i
Generalizando para n células
(18)
i =1
Un problema típico es el siguiente: Se dan como datos la geometría, el material (G ) y el
momento torsor total T y se pide hallar los n flujos de corte qi y el giro por unidad de longitud ( β ).
Se tienen n células y por lo tanto n +1 incógnitas. Se dispone de un sistema de n ecuaciones
acopladas (16) que permiten calcular los qi en función de β (que es único). Reemplazando luego en
(18) podemos despejar el valor de β con el que finalmente se calculan los qi .
Secuencia de cálculo para resolver la sección de dos células de la Figura 4:
β = 2β G ;
Comenzamos definiendo:
Ec. (16) →
a b q1
⋅ = 2β G
c d q2
Ec. (18)
→ T
=
Γ1
Γ 2
→
qi = β qi
q1
a b q1 Γ 1
resolviendo
→
⋅=
c d q2 Γ 2
q2
q1 = β q1
T
→
2 ( Γ 1 q1 + Γ 2 q 2 )
q2 = β q 2
2 β ( Γ 1 q1 + Γ 2 q2 )
=
→ β
despejando
(19)
(20)
(21)
Para obtener el módulo torsional se parte de (12)-b se tiene en cuenta (19) y se generaliza (21):
JR = 4
∑Γ
172
i
qi
(22)
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
4 ÁREA SECTORIAL
Las vigas de pared delgada pueden estar solicitadas por torsión o bien torsión y flexión. El
análisis de tales problemas se simplifica definiendo una propiedad de la sección llamada Área
Sectorial.
Figura 5: Definición del área sectorial
Para la sección abierta de pared delgada de la Figura 5 se elige arbitrariamente un punto
inicial ( I ) para medir la distancia ‘s’ sobre la línea media. También se elige arbitrariamente un
punto ( P) como ‘polo’ y se define el área sectorial ω (s) como
=
ω (s)
s
r ds
∫=
0
∫
s
dω
0
[cm2]
(23)
Notar que el área sectorial es un valor asociado a cada punto de la línea media de la sección.
El incremento dω es positivo cuando PQ rota en sentido antihorario. Notar que si se cambia
el punto inicial, el valor del área sectorial cambia en una cantidad fija en todos los puntos (el
cambio es igual al valor del área sectorial en el nuevo punto inicial ).
A modo de ejemplo se muestran los gráficos del área sectorial para una misma sección donde
se cambia la ubicación del polo y del punto inicial.
Figura 6: Distintos gráficos del área sectorial cambiando el polo y el punto inicial
Otras propiedades útiles para el análisis de secciones de pared delgada son las siguientes:
1) Momento estático sectorial...................
Mω =
∫ ω (t ds)
[cm 4 ]
(24)
2) Momento sectorial de 1er orden...........
Sωx =
∫
[cm5 ]
(25)
Iω =
∫ω
[cm 6 ]
(26)
s
s
y ω (t ds )
donde y es la distancia al eje “x”
3) Momento de inercia sectorial................
173
s
2
(t ds )
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
Notar que estas propiedades de las secciones de pared delgada dependen de la geometría de la
sección y de la elección de los puntos “I ” y “P ”.
Las propiedades (24), (25) y (26) son propiedades de la sección a diferencia del área sectorial
definida en (23) que varía de punto a punto de la sección. Notar que (25) depende además del eje
de referencia “x ” .
4.1 Diagrama principal de área sectorial
Cuando se utiliza el centro de corte como polo, los momentos sectoriales de primer orden ( Sω )
definidos en (25) respecto a ejes principales resultan nulos independientemente de la elección del
punto inicial. Esto se demuestra más adelante, ver ecuación (66). Si además se elige el punto inicial
de modo que el momento estático sectorial se anule, se obtiene un diagrama de área sectorial que se
denomina “diagrama principal de área sectorial ”.
Para obtener el diagrama principal se calcula primero ω1(s) usando al centro de corte como
polo y adoptando un punto inicial cualquiera
ω 1( s ) =
∫
s
0
r ds
(27)
Cambiar el punto inicial implica restar una constante (ωo ) en todos los puntos de la sección
ω=
ω 1( s ) − ωo
(s)
(28)
Para que la nueva área sectorial ω (s) así definida sea el diagrama principal deberá cumplirse que
∫
de donde
s
0
ω ( s ) ( t ds ) = 0
∫ ω ( t ds ) − ω ∫ ( t ds ) =0
Resumiendo:
1( s )
→
o
(29)
ωo =
1
ω 1( s ) ( t ds )
A∫
(30)
1º ) se calcula ω1(s) según (27) usando al centro de corte como polo.
2º ) se calcula la constante ωo usando (30), donde A es el área de la sección.
3º ) se obtiene el área sectorial principal ω(s) usando (28).
Nota 1: Recordar que debe utilizarse como polo al centro de corte.
Nota 2: Cuando hay un eje de simetría basta tomar el punto inicial I sobre el eje de simetría para
obtener directamente el diagrama principal sin necesidad de usar el procedimiento anterior !
5 ALABEO - TENSIONES SECUNDARIAS
5.1 Desplazamientos por alabeo
La mayoría de las secciones alabean cuando son torsionadas. Se denomina ‘alabeo’ a los desplazamientos en el sentido axial que hacen que las secciones originalmente planas no permanezcan planas
después de ser torsionadas. Cuando el alabeo está restringido por los apoyos se originan tensiones
denominadas “secundarias” son de dos tipos: i) axiales en el sentido de viga y ii ) de corte actuando
en las secciones transversales.
Para desarrollar expresiones que permitan calcular el desplazamiento axial u, consideramos el
tramo de viga de la Figura 7-a.
Figura 7: Contribuciones a las deformaciones por corte en una viga solicitada en torsión
174
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
Aislando un elemento genérico ABCD se observa que hay dos contribuciones a las deformaciones de corte γ (ver Figura 7-b): i ) la primera que llamaremos α se origina en la rotación relativa
de una sección respecto a la otra que se encuentra a una distancia dx y ii ) la segunda que
llamaremos λ se origina en la variación de los desplazamientos axiales u, ( alabeo):
γ = α +λ = β r+
du
ds
(31)
La distorsión de corte γ produce en el plano medio un flujo de corte q. Según (2) y la ley de
Hooke asociada al corte se tiene:
(4) →
Hooke
q = τ t
q
→ γ =
Gt
τ = γ G
du
=
ds
→ (31) →
q
−βr
Gt
(32)
5.2 Secciones abiertas
Recordando que las secciones abiertas no tienen flujo de corte ( q ≡ 0 ) , se puede integrar (32)
llegando a:
u=
−β
∫
s
0
r ds − u0
u( s ) =
− β ω( s ) − u 0
→
(33)
La ecuación (33) muestra que los desplazamientos por alabeo en secciones abiertas de pared
delgada son proporcionales al giro por unidad de longitud β y tienen la misma ley de variación que
el área sectorial ω(s) a lo largo del perímetro. Notar que u0 es una traslación de toda la sección que
depende del punto inicial utilizado para definir el área sectorial.
IMPORTANTE: Las secciones abiertas cuya área sectorial es nula en todos los puntos no se
alabean. Esto ocurre, por ejemplo, cuando la sección está constituida por un haz de elementos
rectos que concurren en un punto como se muestra en la Figura 8.
Figura 8: Secciones abiertas formadas por un haz de rectas concurrentes cuya área sectorial es nula
5.3 Secciones cerradas
En una sección cerrada no existe el corte EF de la Figura 7-a y se obtiene en general un flujo
de corte no nulo constante en el perímetro. Integrando (32) y haciendo nula la constante de
integración u0 se obtiene:
− β ω( s ) +
u( s ) =
q
G
∫
s
0
ds
t
(34)
Reemplazando las fórmulas de Bredt (6) y (11) en (34) se tiene
=
u( s )
ω (s)
T s ds
−
∫0
2G Γ
2Γ
t
∫
ds
t
(35)
Si se recorre todo el perímetro ω = 2 Γ y entonces u(s) = 0, lo que es correcto porque estamos
nuevamente en el punto inicial.
Se sugiere al lector verificar que existen algunos casos donde u(s) ≡ 0 en todos los puntos y por
lo tanto la sección no alabea. Tal es el caso de las secciones mostradas en la Figura 9-a, b y c.
175
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
Figura 9: Ejemplos de secciones que no alabean
5.4 Tensión axial secundaria
Cuando el alabeo varía a lo largo del eje x se originan tensiones normales secundarias en el sentido
del eje de la viga. Se denominan tensiones secundarias porque a priori uno no esperaría que la
torsión produzca tensiones normales que se suman a las causadas por la flexión y el esfuerzo axial.
La variación en el desplazamiento de alabeo, u, se origina en las siguientes causas:
1. Variaciones del momento torsor a lo largo de la viga,
2. Restricción al alabeo libre en una o más secciones (apoyos) o
3. Una combinación de las dos causas anteriores actuando simultáneamente.
Para el caso de torsión actuando sola se tiene:
du( s )
ε x (s) =
σ x (s) = E ε x (s)
→
dx
(36)
a) Sección abierta
Empleando (36) y (33) se tiene:
dβ
−E
σ x(s) =
ω (s)
dx
σ x (s) = − E
→
d 2θ
ω (s)
dx 2
(37)
La ecuación (37) muestra que, para el caso de torsión pura, la distribución de tensiones axiales
secundarias sigue la misma ley de variación del área sectorial principal.
Debido al tipo de solicitación (torsión pura) deben anularse: i) la resultante de las fuerzas
axiales, ecuación (38) y ii) los momentos de las tensiones axiales respecto a ejes principales de
inercia de la sección transversal (ejes “y” y “z”), ecuaciones (39) y (40) ( dichos momentos serían
momentos flectores ).
=
Fx
σ x dA
∫=
(s)
A
0
(38)
=
My
z σ x dA
∫=
0
(39)
=
Mz
y σ x dA
∫=
0
(40)
A
A
(s)
(s)
Siendo σx proporcional al área sectorial y teniendo en cuenta (38) se deduce que ω(s) en (37) es
el área sectorial principal definida en (28) y que se calcula usando los valores obtenidos con las
ecuaciones (27) y (30). Las ecuaciones (39) y (40) son los momentos sectoriales de primer orden
definidos en (25) que se anulan cuando se utiliza al centro de corte como polo.
Para calcular la tensión axial secundaria σx(s) es necesario conocer la variación de β o θ como
función de x y eso depende del problema en particular que se esté considerando.
b) Sección cerrada
En una sección cerrada hay tensión axial secundaria σx(s) sólo si el momento torsor varía en
función de x. Empleando (36) y (35) se tiene:
=
σ x(s)
ω( s )
s ds
E
−
∫0
2G Γ
2Γ
t
176
∫
ds dT
t dx
(41)
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
5.5 Tensión de corte secundaria
Si dβ/dx no es constante aparece un flujo de corte variable en el contorno, aún en el caso
secciones abiertas, y la tensión cortante, τ = q/t, no se anula sobre la línea media de la sección.
Notar que de acuerdo a la teoría de Saint Venant la variación de las tensiones de corte por torsión
es lineal en el espesor de las vigas abiertas de pared delgada y la línea media tiene tensiones de
corte nulas.
Figura 10: Tensiones de corte secundarias en secciones abiertas de pared delgada
Para un elemento de una sección abierta debe cumplirse equilibrio de fuerzas según la
dirección del eje de la viga (eje x). Observando la Figura 10 se tiene:
∂σ x ( s )
∂q( s )
dx t ds +
ds dx =
0
∂x
∂s
(42)
Sustituyendo σx(s) según (37), simplificando e integrando se obtiene:
∂q( s )
ds
q( s ) = E
d 3θ
M ω (s)
dx 3
= E
d 2β
ω t
dx 2 ( s )
donde M ω ( s ) = ∫
(43)
s′= s
s′= 0
ω ( s′) t ds′
(44)
M ω(s) es el momento estático sectorial que varía en el contorno en función de ‘s’ a diferencia de
la propiedad definida en (24) que corresponde a toda la sección. La constante de integración en (44)
resulta nula porque siempre se integra a partir de un extremo libre de la sección donde s’ = 0, s = 0
y q = 0. El valor de ω ( s′ ) en cada punto es igual al valor del diagrama principal de área sectorial en
ese punto. Notar que en el extremo libre donde s’ es nula el flujo de corte q es nulo pero el área
sectorial no es nula en ese punto (el valor nulo ocurre en el punto inicial con que se definió el área
sectorial principal !!).
Notar que hay una aparente incongruencia en el razonamiento. En efecto (43) y (44) se basan
en (33) que se derivó suponiendo que la tensión de corte es nula en la línea media y luego a partir
de ella se derivó (44) para calcular el flujo de corte q que no es nulo en la línea media.
Razonamientos similares son utilizados en teoría de flexión de vigas y teoría de flexión de
placas. La obtención de (43) se basa en condiciones de equilibrio similares a las que permiten
obtener las tensiones de corte de Jourasky. El error que se comete al calcular σx ignorando q es
muy pequeño y por lo tanto el error de q basado en σx también resulta despreciable.
6 TORSIÓN CON ALABEO RESTRINGIDO
La teoría de Saint Venant supone que las cargas externas y los apoyos son tales que permiten
el libre alabeo de las secciones, pero existen muchos casos de interés práctico en que el alabeo está
restringido. Un caso muy común es aquel en que se tiene una viga en voladizo donde los desplazamientos axiales están restringidos en el empotramiento (apoyo).
Nos proponemos resolver el siguiente problema: Determinar el giro por unidad de longitud, β,
y las tensiones como función de x en el caso de una viga de pared delgada solicitada por torsión y
con restricción al alabeo. La teoría correspondiente comenzó a ser desarrollada por Timoshenko en
1905 y fue completada por Vlasov alrededor del año 1950.
177
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
6.1 Ecuación general de la torsión para secciones abiertas
Se considera una sección abierta de forma arbitraria del tipo de la Figura 11-a solicitada por un
momento torsor ‘T ’ en el extremo libre.
Figura 11: Tensiones por torsión de una viga de pared delgada y sección abierta
Si se considera una sección cualquiera (para un cierto valor de la coordenada x) como la
indicada en la Figura 11-a se observan tensiones de corte τ de Saint Venant que varían linealmente
en el espesor ( Figura 11-b) y tensiones de corte uniformes en el espesor pero variables en el contorno,
correspondientes al flujo de corte secundario, qs, debido a la restricción al albeo libre (Figura 11-c).
Partiendo de la ecuación (5) se puede calcular el momento torsor, Tq , resistido por el flujo de
corte secundario qs debido a las restricciones al alabeo:
=
Tq
r ( q ds ) ∫ q
∫=
s
s
dω
(45)
El cálculo de qs está dado en la ecuación (44) y requiere hacer una integración a lo largo del
contorno medio de la sección abierta. Para evitar esa integral recurrimos a la integración por partes de
la ecuación (45):
∂q
F
=
Tq ∫=
qs d ω
(46)
[ω qs ] I − ∫ ω s ds
∂s
La cantidad entre corchetes se anula porque q = 0 en los puntos extremos de la sección abierta
(puntos I y F, en la Figura 11-c). Reemplazando ( ∂qs /∂s) por el valor dado en (43) se tiene
d 2β
2
−E
ω (t ds ) →
Tq =
2 ∫ ( s)
dx
Tq = − E
d 2β
Iω
dx 2
(47)
Notar que la integral es el momento de inercia sectorial Iω definido en la ecuación (26) que se
calcula a partir del área sectorial principal.
La parte del momento torsor, TSV , resistido por las tensiones de corte de Saint Venant de variación
lineal en el espesor t, bosquejado en la Figura 11-b se calcula de la manera habitual considerando (12):
dθ =
T
dx → β =
G JR
dθ
=
dx
T
G JR
→
TSV = β G J R
(48)
Sumando las contribuciones dadas en (47) y (48) y multiplicando por menos 1, se tiene:
d 2β
− G JR β =
− T (49)-b
(49)
dx 2
El coeficiente (EIω ) se denomina rigidez al alabeo, mientras que el coeficiente (GJR ) es la
rigidez a la torsión clásica de Saint Venant. Dividiendo por EIω se obtiene una ecuación diferencial
de segundo orden en β
Tq + TSV =
T (49)-a
→
E Iω
d 2β
T
− K2 β =
− K2
2
dx
G JR
donde
K2 =
G JR
E Iω
(50)
(51)
178
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
Reemplazando β por (dθ/dx) en (50) y derivando respecto a x se tiene
2
d 4θ
T′
2 d θ
−
=
−K2
K
4
2
dx
dx
G JR
(52)
dT
(53)
dx
La ecuación (52) es la ecuación diferencial de la torsión para secciones abiertas.
Debe quedar claro que tanto T en (50) como T ′ en (52) son en general variables en función de
la coordenada x.
T′ =
donde
Para el caso T = cte., la solución de (50) es
β = B1 senh ( Kx) + B2 cosh ( Kx) + T /(G J R )
(54)
Para el caso de momento torsor de variación lineal, T ′ = cte. la solución de (52) es:
θ =C1 + C2 x + C3 senh ( Kx) + C4 cosh ( Kx) + T ′ x 2 / ( 2 G J R )
(55)
Las constantes de integración se calculan a partir de las condiciones de borde. Por ejemplo
para un borde empotrado:
=
T
constante:
en=
x
0
→ =
β 0
(56)
T′
=
constante:
en =
x 0
dx 0
θ 0 y dθ /=
→ =
(57)
En el caso general donde T tiene una variación arbitraria se recurre a la integración numérica
de la ecuación diferencial que se desarrolla en la Sección 9.2.
7 FLUJO DE CORTE POR CORTE
En el caso de vigas de pared delgada, abiertas, rectas y de sección constante, las tensiones de
corte por corte son tangentes a la línea media de la sección y uniformes en el espesor. Esto da
origen a un flujo de corte q(s) que varía a lo largo del perímetro de la sección, cuyo valor se
determina por la conocida fórmula de Jourasky.
7.1 Secciones abiertas simétricas
Sea, por ejemplo, la viga en voladizo de la Figura 12 donde los ejes “y” y “z” son ejes
principales de inercia que pasan por el centro de gravedad de la sección. El eje x tiene la dirección
de la viga que es recta y de sección constante. El centro de corte se ubica sobre el eje de simetría.
Figura 12: Tensiones de corte por corte en una sección abierta simétrica de pared delgada
La tensión de corte τ debida al esfuerzo de corte Qz actuando en el centro de corte, se calcula
con la fórmula de Jourasky:
τ =
QS
tI
→ (4) →
q( s) = −
Qz S y ( s )
I y*
s
donde S y ( s ) =
∫ z t ds
(58)
I
donde q(s) es el flujo de corte activo que recorre la línea media de la sección de pared delgada; s es
la coordenada curvilínea que sigue la línea media de la sección ( s es igual a cero en el extremo que
se toma como punto inicial I ) ; Qz es el esfuerzo de corte en la sección, S y (s) es el momento estático
179
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
respecto al eje “y” del área comprendida entre el punto inicial y el punto definido por la coordenada
*
“s”, I y es el momento de inercia consistente respecto al eje “y”.
*
El momento de inercia consistente I y se calcula concentrando el área sobre la línea media del
perímetro. Siendo consistente se asegura que al integrar el flujo de corte q(s) dado en (58), que se
considera actuando sobre la línea media, se obtendrá el valor del esfuerzo cortante Q que es dato.
Convención de signos: Q es positivo cuando tiene el sentido del eje z positivo. Si el flujo de
corte q(s) resulta positivo es porque apunta en el sentido creciente de la coordenada s que define el
punto donde se calcula el flujo de corte. El “flujo de corte activo” tiene por resultante al esfuerzo de
corte y pasa por el centro de corte. Se denomina “reactivo” al flujo que equilibra el esfuerzo de corte.
En la Figura 12 se observa que el flujo de corte es de intensidad variable (varía de acuerdo al
valor del momento estático del área que es nulo en los extremos y máximo en el centro de gravedad ) y
tiene la dirección de la línea media. Notar que en las alas superiores el flujo de corte es horizontal a
pesar de que el esfuerzo de corte Q es vertical (según el eje z ) . Notar que se han graficado flujos activos.
7.2 Secciones abiertas asimétricas
En el caso de una sección asimétrica como la mostrada en la Figura 13 se deben determinar
primero los ejes principales de inercia ‘y* ’ y ‘z* ’. La carga P que es vertical debe descomponerse
según las direcciones principales para determinar los esfuerzos de corte Qy* y Qz*. Se puede
anticipar que el centro de corte está ubicado en la intersección de las líneas medias de las alas.
Figura 13: Tensiones de corte por corte en una sección abierta asimétrica
Los flujos de corte por corte causados por Qy* y Qz* se calculan por separado usando (58) y
posteriormente se suman las dos contribuciones al flujo de corte por corte q (s).
=
q ( s ) z*
−
Qz* S y* ( s )
=
q ( s ) y*
I y**
−
Q y* S z* ( s )
I z**
→
=
q( s)
q ( s ) z* + q ( s ) y*
(59)
7.3 Secciones cerradas simétricas
Cuando la sección cerrada posee un eje de simetría y la carga cortante actúa según ese eje de
simetría, se puede anticipar que el flujo de corte es nulo sobre el eje de simetría (debido a la simetría).
Figura 14: Tensiones de corte por corte en una sección cerrada simétrica
En casos como el de la Figura 14 se puede aplicar la fórmula de Jourasky (58) tomando como
punto inicial al punto A. Para un punto tal como el C deberá calcularse el momento estático del área
ABC respecto al eje ‘y’. Notar que el momento estático es máximo a la altura del centro de gravedad
( punto G ) y en consecuencia el flujo de corte por corte también resulta máximo en esa zona.
7.4 Secciones cerradas asimétricas
La determinación del flujo de corte por corte en el caso de secciones cerradas asimétricas se
trata más adelante al final de la Sección 8 dedicada al centro de corte.
180
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
8 CENTRO DE CORTE
La incidencia de la ubicación del centro de corte puede visualizarse considerando una viga en
voladizo como la mostrada en la Figura 15-a. Bajo la acción de la carga vertical aplicada en el
extremo, la viga se flexiona y puede también girar por torsión.
Figura 15: Giro de una sección abierta en función de la ubicación de la carga respecto al centro de corte
El esquema indicado en la Figura 15 permite intuir que existe una ubicación de la carga para
la cual la viga no gira por torsión ya que si la carga está a la izquierda como en el caso de la Figura
15-b el giro es antihorario y si está a la derecha como en el caso 15-d el giro es en sentido horario.
Una carga transversal que pasa por el “centro de corte” no produce torsión en la viga.
En el caso de secciones “llenas” el centro de corte está muy próximo o coincide con el centro
de gravedad de la sección. En tales casos, la ubicación precisa no es importante.
La ubicación del centro de corte en vigas delgadas abiertas es muy importante por su baja
resistencia y rigidez a torsión (aunque la rigidez aumenta considerablemente cuando se restringe el
alabeo en los apoyos). Es importante enfatizar que el momento torsor debe calcularse respecto al
centro de corte.
El centro de corte es el punto donde pasa la resultante de las tensiones de corte
(o flujos de corte) de Jourasky para cualquier dirección de la carga transversal.
En el extremo donde actúa la carga, el centro de corte real no coincide con el calculado porque
no es posible aplicar la carga transversal en forma de tensiones de corte exactamente iguales a las
calculadas con la fórmula de Jourasky. En las proximidades del extremo empotrado el centro de
corte real tampoco coincide con el calculado por Jourasky debido a que la restricción al alabeo
produce un flujo de corte adicional.
Cuando se desprecian las deformaciones de la sección de pared delgada en su propio plano
debido a la flexión, el centro de corte coincide con el centro de giro. Hay que recordar que el centro
de giro es el punto que no se desplaza cuando la sección gira por torsión.
En la Figura 16 se observa que la variación del flujo de corte de Jourasky, proveniente de la
variación del corte a lo largo de la viga, deforma la sección plana de la viga de pared delgada.
Figura 16: Variación del flujo de corte de Jourasky y deformación de la sección de la viga
Aplicando el teorema de reciprocidad se puede demostrar que el centro de corte coincide con
el centro de giro (ver Figura 17 ).
181
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
Figura 17: Aplicación del Teorema de Reciprocidad
En el estado I, la carga Q actuando en el punto A produce un giro θQA .
En el estado II, el momento torsor T aplicado en A produce un desplazamiento vertical uTA .
Q uTA = T θQA
Por reciprocidad se tiene:
(60)
Cuando A coincide con el centro de corte, θ = 0 entonces según (60) u = 0 , por lo tanto A
es también centro de giro.
A
Q
A
T
8.1 Centro de corte de secciones abiertas con un eje de simetría
Cuando una sección de pared delgada tiene un eje de simetría como en el caso de la Figura 18-a,
se puede anticipar (por simetría) que el centro de corte está ubicado sobre dicho eje de simetría. En
efecto, una carga cortante horizontal, Qy, actuando en el eje de simetría (eje ‘y’) produce tensiones
de corte simétricas respecto al eje ‘y’ cuya resultante pasa por el eje de simetría.
Figura 18: Sección abierta con un eje de simetría
Para ubicar el centro de corte hay que calcular la distancia “e” indicada en la Figura 18-c
Primero se calculan los flujos de corte q (s) debidos al esfuerzo de corte Q según Jourasky y
luego se ubica el centro de corte ‘C’ de modo que el momento, T, de las fuerzas asociadas a los
flujos de corte respecto a C sea nulo.
=
T
(61)
=
∫ r [ q( s) ds ] 0
Notar que q(s) es variable y se calcula usando la fórmula de Jourasky (58) en función de la
coordenada curvilínea “s” que recorre la línea media del espesor de la sección de pared delgada.
En el caso de tramos rectos como en la sección de la Figura 18, conviene encontrar, en cada
tramo, la resultante Fi del flujo de corte variable y luego tomar momentos respecto al centro de
corte ( punto C ). En el caso de la Figura 18-c se tiene:
h
h
+ F2 e − F3
=
0
2
2
lo que permite despejar la distancia e que ubica al centro de corte.
− F1
La fuerza F1 se calcula integrando ........ F1 =
∫
b
0
q1( s ) ds
donde el flujo de corte se calcula con (58) ..... q1 ( s ) = −
Q S1 y ( s )
I y*
siendo el momento estático variable .…......... S1 y ( s ) = ( s t ) (h / 2)
Signos: S1y(s) es positivo, Q es positivo (hacia arriba), luego q1(s) es negativo ( hacia la derecha).
182
(62)
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
Procediendo de manera similar se puede obtener F2, mientras que F3 = – F1. Notar que no es
*
necesario calcular I x porque se lo puede sacar factor común en la ecuación (62) que está igualada
a cero. Como alternativa se puede tomar momentos respecto a intersección de F2 y F3 y de esa
*
manera no hace falta calcular ni F2 ni F3, pero en ese caso si hace falta calcular I x ..
Notar que para determinar el centro de corte, en este ejemplo se utilizó (61) en conjunción con
(58), pero existe un procedimiento alternativo dado por las ecuaciones (64) y (65) donde se calcula
primero el momento estático de 1er orden dado en (25) utilizando ejes principales de inercia para
determinar las coordenadas del centro de corte.
Cuando una sección tiene un centro de simetría, el centro de corte coincide con dicho centro
de simetría, tal es el caso de la sección de la Figura 19-a.
En el caso de secciones formadas por un haz de rectas que concurren en un punto como en las
Figuras 19-b, c y d se puede anticipar que el centro de corte se halla en la intersección común a
todas las líneas medias de los tramos rectos, porque allí concurren las fuerzas resultantes de los
flujos de corte en cada tramo.
Figura 19: Ubicación del centro de corte de secciones formadas por un haz de rectas concurrentes
8.2 Centro de corte de secciones abiertas asimétricas
En el caso de una sección de pared delgada abierta de forma arbitraria como en el caso de la
Figura 20-a que no tiene eje de simetría ni centro de simetría, se debe calcular primero el centro de
gravedad ( punto G) y los ejes principales de inercia ‘y* ’ y ‘z* ’.
Figura 20: Ubicación del centro de corte en secciones abiertas sin eje de simetría
Para ubicar la posición del centro de corte se calculan por separado sus coordenadas ey* y ez*
referidas a los ejes principales. Primero se calcula la coordenada ey* donde pasa la resultante de los
flujos de corte de Jourasky para el esfuerzo de corte Qz* según z *.
Calculando q(s) según (58) usando ejes principales y eligiendo el baricentro como polo ( punto G )
se plantea el equilibrio de momentos respecto al punto G (momento antihorario positivo):
=
Qz* ey*
∫
F
I
r q( s ) ds
→=
e y*
183
−
1 F
S y*( s ) rds
I y** ∫I
(63)
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
Para realizar la integral (63) sería necesario calcular previamente el momento estático Sy* (s)
resolviendo la integral dada en la ecuación (58). Esto se puede evitar integrando por partes la
ecuación (63) como se indica a continuación:
F d
F
−1
1 F
ω ( s ) S y*( s ) I − ∫ [ S y*( s )] ω ( s ) ds =
ey* =
z* ω ( s ) t ds →
*
* ∫
I
I y*
ds
I y* I
e y* =
Sωy*
I y**
(64)
donde se ha tenido en cuenta la definición (25) de momento sectorial de 1er orden respecto al eje
principal y* y el hecho de que Sy* (s) se anula en el punto inicial I y en el punto final F. Notar que
en la integración por partes:
i ) se integró al diferencial de área sectorial
∫
s
0
r ds = ω ( s ) .
d
d s
=
S y*( s )
=
z* t d s z* t .
ds
ds ∫ I
En una segunda etapa se calcula la otra coordenada del centro de corte: Para ello se repite el
procedimiento anterior y se obtiene un resultado similar excepto por el signo, (momento antihorario
positivo):
F
S z*
repitiendo el procedimiento
ez* = − ω*
=
− Qy* ez* ∫ r (q( s ) ds)
→
(65)
I
I z*
ii ) se derivó al momento estático
Corolario importante
Si en el caso de la Figura 20-a se toma momentos respecto al centro de corte (punto C ) y se
repite el procedimiento que conduce a las ecuaciones (64) y (65) se puede anticipar que las nuevas
distancias al centro de corte ( e′y* y e′z* ) serán nulas, porque se está tomando momentos respecto al
centro de corte.
(64) e′y=
*
Sω′ y*
=
I y**
0 →
Sω′ y* = 0
′
(65) e=
z*
−
Sω′ z*
=
I z**
0 →
Sω′ z* = 0
(66)
Esto permite afirmar que: Cuando se utiliza el centro de corte como polo, los momentos
sectoriales de primer orden (Sω) definidos en (25) respecto a ejes principales resultan nulos
independientemente de la elección del punto inicial. Este hecho tiene mucha importancia en el
contexto de los momentos flectores definidos en (39) y (40).
El centro de corte puede también calcularse usando ejes no principales, como por ejemplo los
ejes ‘y’ y ‘z’ en la Figura 20-a. En tal caso las expresiones para las coordenadas son las siguientes:
=
ey
I z* Sωz − I yz* Sωy
=
ez
2
I y* I z* − ( I yz* )
− I y* Sωy + I yz* Sωz
I y* I z* − ( I yz* )
2
(67)
8.3 Centro de corte de secciones cerradas con simetría
En el caso de secciones cerradas con dos ejes de simetría, el centro de corte se halla en la
intersección de esos dos ejes. Tal es el caso de las secciones mostradas en las Figuras 21-a, b y c. Si
una sección tiene un centro de simetría como en la Figura 20-d, ese punto resulta ser también el
centro de corte.
Figura 21: Ubicación del centro de corte de secciones con simetría
184
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
8.4 Centro de corte de secciones cerradas sin simetría
En un caso general como el mostrado en la Figura 22 el flujo de corte resulta estáticamente
indeterminado. Para resolver el problema se considera la superposición de dos estados ( e stado I y
estado II ), de modo que en uno de esos estados (el estado I ) se elige un punto arbitrario (digamos
el punto A) donde el flujo de corte es nulo. Eso permite calcular el flujo en los puntos restantes
usando la fórmula de Jourasky partiendo de ese punto.
Figura 22: Ubicación del centro de corte de una sección cerrada no simétrica
Para hallar la ubicación del centro de corte se determina primero el baricentro ( punto G ) y los
ejes principales de inercia ‘η’ y ‘ξ ’ . Luego se calculan por separado cada una de las coordenadas
del centro de corte (ηc y ξ c ) respecto a los ejes principales utilizando esfuerzos de corte unitarios
(1η y 1ξ ) aplicadas en el centro de corte. La coordenada ηc se calcula en tres pasos:
Paso 1. Se elige un punto cualquiera, digamos el punto A como referencia y se obtiene el estado I
restando qA al flujo q(s). De esa forma el flujo de corte en el punto A en el estado I es nulo y
permite calcular el flujo de corte por Jourasky considerando como punto inicial al punto A.
qI ( s ) =
q( s ) − q A
→
qI ( s ) se calcula por Jourasky
(68)
Paso 2. Se calcula qA exigiendo que la sección no gire por torsión ( β = 0) porque el esfuerzo de
corte unitario 1ξ actúa en el centro de corte. Utilizamos la expresión generalizada (11)
para el caso de flujo de corte variable.
β =
0 ⇒
1
2G Γ
∫ ( q
I (s)
+ qA )
ds
=
0
t( s )
→
qA =
− ∫ qI ( s )
∫
ds
t( s )
ds
t( s )
(69)
Paso 3. Se ubica el centro de corte determinando el punto de aplicación de la resultante del flujo
de corte q(s) que es el esfuerzo de corte unitario (1ξ ). Notar que qI (s) se calculó en el estado I
para una fuerza unitaria y que el flujo qA actuando en la sección cerrada del estado II
produce momento torsor pero no fuerza resultante. Tomando momentos respecto al
baricentro (punto G ) se puede despejar el valor de la coordenada ηc.
q( s ) = qI ( s ) + q A
→ 1ξ ηc =
∫ ( q
(s)
ds ) r( s )
→
ηc =
∫ q
(s)
r( s ) ds
(70)
Notar que resultaría más conveniente, en este caso particular, tomar momentos respecto a uno
cualquiera de los vértices ( A, B ó C ) porque sólo tendríamos que considerar la integral en uno de
los tramos rectos.
Para calcular la coordenada ξ c se procede de manera similar ( pasos 1, 2 y 3).
185
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
8.5 Flujo de corte por corte y torsión de una sección cerrada sin simetría
En la Figura 23 se presenta el caso general de una sección cerrada no simétrica solicitada por
cargas que no actúan en el centro de corte y por lo tanto producen torsión además de corte. Primero
se determina el centro de gravedad G, los ejes principales de inercia y el centro de corte C. A
continuación se reemplaza al sistema de fuerzas (Ph y Pv ) por los dos esfuerzos de corte según los
ejes principales (Qη y Qξ ) que actúan en el centro de corte y por el momento torsor T de las fuerzas
respecto al centro de corte. Notar que para calcular T se necesita conocer ηc y ξ c .
Figura 23: Sección cerrada no simétrica solicitada por corte y torsión
Para resolver el problema de determinar los flujos de corte de una sección cerrada no simétrica
solicitada en corte y torsión existen dos alternativas: i ) calculando previamente la ubicación de
centro de corte, y ii) sin encontrar previamente el centro de corte.
Alternativa 1. Utilizando las coordenadas del centro de corte
1. Se determinan primero los flujos de corte causados por el esfuerzo de corte Qξ actuando en el centro
de corte ( punto C en la Figura 23-b). Como el problema es estáticamente indeterminado se
procede a descomponer el sistema en la suma de dos estados ( I y II ) como se muestra en la
Figura 24. Notar la similitud con el caso de la Figura 22.
Figura 24: Descomposición en dos estados para calcular el flujo de corte causado por Qξ
2. El flujo de corte constante del estado II (qξA) se calcula, como en el caso de la Figura 22,
exigiendo que la sección no gire por torsión (β = 0) porque el esfuerzo de corte Qξ actúa en el
centro de corte. Utilizamos la expresión generalizada (11) para el caso de flujo de corte variable
y obtenemos nuevamente la ecuación (69).
3. Se determinan luego los flujos de corte causados por el esfuerzo de corte Qη actuando en el
centro de corte ( punto C en la Figura 23-b ) repitiendo el procedimiento del punto 1.
Figura 25: Descomposición en dos estados para calcular el flujo de corte causado por Qη
4. El flujo constante del estado II (qηA) se calcula repitiendo el procedimiento del punto 2.
5. A continuación se calcula el flujo de corte por torsión usando la fórmula de Bredt. Notar que
para calcular el momento torsor T se necesita conocer las coordenadas del centro de corte ηc y ξ c.!
qT = T / (2 Γ )
(71)
6. Finalmente se calcula el flujo de corte total, q(s), causado por el sistema de cargas (Ph y Pv ), que es
186
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
equivalente al momento torsor T y los dos esfuerzos de corte, Qξ y Qη .
q( s=)
(qIξ ( s ) + qξ A ) + (qIη ( s ) + qη A ) + qT
(72)
Alternativa 2. Sin utilizar las coordenadas del centro de corte
Notar que la ecuación (72) puede reescribirse como:
q( s ) = qξ ( s ) + qη ( s ) + q0
donde: q0 =
(q
ξA
+ qη A + qT )
(73)
Esto da lugar a un procedimiento alternativo más simple que se muestra esquemáticamente en
la Figura 26. Sólo hace falta calcular q0 en vez de sus tres componentes ( qξA, qηA, y qT ).
Figura 26: Descomposición en tres estados
Paso 1: Se calculan por Jourasky los flujos qξ (s) del estado I de la Figura 26 ( se considera Qξ ) .
Paso 2: Se calculan por Jourasky los flujos qη (s) del estado II de la Figura 26 ( se considera Qη ) .
Paso 3: Se calcula el valor del flujo constante q0 del estado III de la Figura 26. Para ello se iguala el
momento de las cargas aplicadas (Ph y Pv ) con el momento del flujo de corte que recorre el
contorno de la sección cerrada respecto a un punto arbitrario que resulte conveniente:
∑ P d= ∫ (qξ
i
i
s
(s)
+ qη ( s ) + q0 ) r( s ) d
q0
→s =
1
∑ Pdi i −∫ s (qξ ( s ) + qη ( s ) ) r( s ) ds
2Γ
(74)
Paso 4: Se computa el flujo de corte total, q(s), causado por el sistema de cargas (Ph y Pv ), usando
la ecuación (73) y los valores qξ (s), qη (s) y q0 calculados en los pasos 1 2 y 3.
9 SOLUCIÓN DE LA ECUACIÓN GENERAL DE LA TORSIÓN
Resuelto el problema de ubicar al centro de corte estamos en condiciones de calcular el momento
torsor. Cuando una viga solicitada principalmente en flexión soporta cargas transversales que no
pasan por el centro de corte se debe calcular el momento torsor T teniendo en cuenta la distancia de
la fuerza al centro de corte. Conocer el valor del momento torsor es muy importante en el caso de
secciones abiertas de pared delgada debido a su escasa rigidez y resistencia a la torsión.
9.1 Soluciones analíticas
En el caso donde el momento torsor es constante en toda la viga ( T = cte ) se obtiene la
solución dada en (54) y cuando la variación del momento torsor es constante en toda la viga
( T ′ = cte ) la solución está dada por (55). Las constantes se determinan de acuerdo a las
condiciones de borde.
9.1-a Viga con momento torsor constante y alabeo restringido en un extremo ( Figura 27).
La solución está dada en (54)
β = B1 senh ( Kx) + B2 cosh ( Kx) + T / (G J R )
Las constantes de integración se determinan a partir de las
condiciones en los extremos de la viga.
Figura 27: Viga canal solicitada en torsión
187
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
Condiciones de borde:
En el apoyo con restricción al alabeo se tiene:
x = 0 ⇒ β =0
→ (54) → B2 = − T / (G J R )
En el extremo libre se observa que σx = 0
d 2θ
− E 2 ω( s ) =
0
→
x = L ⇒ σ x = 0 (37) → σ x ( s ) =
dx
d 2θ
d x2
−T
= K B1 cosh ( Kx) + K
G JR
x=L
d 2θ
dx 2
(75)
=
0
(76)
x=L
T
tanh( KL)
senh ( Kx) = 0 → B1 =
G
JR
x = L
(77)
Reemplazando en (54) el valor de las constantes hallados en (75) y (77)
T
(78)
[ tanh ( KL) senh ( Kx) − cosh ( Kx) + 1 ]
G JR
El giro en el extremo libre se obtiene integrando el giro por unidad de longitud ( β ) a lo largo
de la viga:
L
T L tanh ( KL)
→
θ L = ∫ β dx
θL =
(79)
1 −
0
G JR
KL
=
β
( KL ) → ∞
Cuando
⇒
tanh ( KL) → 1
⇒
θ L = T L / (G J R )
(80)
por lo tanto en las vigas “largas” el efecto de la restricción al alabeo no es muy importante ya que
(80) es la solución de Saint Venant.
La tensión axial secundaria debida al alabeo se obtiene de (37):
dβ
TK
−E
− E ω (s)
σ x(s) =
ω (s) =
[ tanh ( KL) cosh ( Kx) − senh ( Kx)]
dx
G JR
La máxima tensión axial ocurre en el empotramiento:
(81)
ET K
tanh ( KL) ω ( s )
=
−
(82)
x =0
G JR
Las tensiones de corte cerca del extremo libre son principalmente tensiones de Saint Venant de variación lineal en el espesor
cuyo valor máximo es aproximadamente:
T
(83)
τ máx ≈
t
JR
Para una sección genérica las tensiones de Saint Venant resultan:
(48) → TSV = β G J R
Tt
SV
→ τ máx
=
[ tanh ( KL) senh ( Kx) − cosh ( Kx) + 1]
(78)
(84)
SV
JR
(83) → τ máx = ( TSV / J R ) t
La tensión secundaria de corte debida al flujo de corte por restricción al albeo se obtiene de (44).
s
E d 2β s
T
ω=
t ds′ → τ q
=
(85)
(44) → τ q
[ tanh ( KL) senh ( Kx) − cosh ( Kx)] ∫ 0 ω( s′) t ds′
2 ∫ 0 ( s′)
t dx
t Iω
0
→
x=
σ x(s)
τ q = − T / (t( s ) Iω )
El máximo ocurre para x = 0
∫
s ′= s
s ′= 0
ω( s′) t( s′) ds′
(86)
9.1-b Viga con momento torsor constante y alabeo restringido en ambos extremos
Las constantes de (54) se obtienen de las condiciones de borde y después se integra de 0 a L.
x =0 ⇒ β =0 ⇒ B2 =−T / (G J R ) ; x =L ⇒ β =0 ⇒ B1 =−[T /(G J R )] ( cosh KL − 1) / senh KL (87)
θ=
L
∫
L
0
β dx
→
θ=
L
TL
G JR
2
[cosh ( K L) − 1] − senh ( K L)
1
+
K L senh ( K L)
KL
188
(88)
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
9.2 Soluciones numéricas
Resulta conveniente en el contexto de la Teoría de Vlasov definir el Bimomento
B = − E Iω
dβ
dx
(89)
que se mide en kg-cm2 o sea que tiene la dimensión del momento de un momento. Para tener una
interpretación física de este “esfuerzo” podemos observar que según (37) B está relacionado con las
tensiones axiales secundarias.
B
σ x(s) =
ω
(90)
Iω ( s )
Multiplicando ambos miembros de (90) por ω(s) e integrando en toda el área de la sección se
tiene:
) dA
∫ σ ( s ) ω (=
A
x
s
B
Iω
( ) dA
∫ ω=
2
s
A
B
B = ∫ σ x ( s ) ω ( s ) t( s ) ds ∫
→
(91)
A
La ecuación (91) muestra que el Bimomento es una fuerza generalizada de las tensiones
axiales secundarias a través de un esquema de deformaciones asociado a ω(s).
En el caso de tener cargas axiales concentradas se tiene
B =
n
∑ F ω( s)i
i =1
(92)
i
Retornando a nuestro objetivo de resolver numéricamente la ecuación general de la torsión
(52) que es de 4to orden, se comienza reduciendo el orden planteando 4 ecuaciones diferenciales de
1er orden como se muestra a continuación.
Tq + β (G J R ) =
T
según (49) y (48) se tiene......................
(93)
derivando (93) y considerando
K 2B + T ′
donde: T ′ =
dT / dx
la definición de B (89) y de K 2 (51)............. dTq / dx =
dB / dx = Tq
de (47) y (89).........................................
(95)
de la definición de B (89)....................... d β / dx = − B / ( E Iω )
(96)
dθ / dx = β
por definición de β.................................
(94)
(97)
Reemplazando las derivadas de 1er orden por diferencias finitas entre los valores de las
respectivas variables en dos estaciones sucesivas de integración (i ) e (i+1) se llega a:
de (94).........................
Tq i +1 − Tq i = ∆ x K 2 ( B i +1 + B i ) / 2 + ∆x (Ti′+1 + Ti′ ) / 2
(98)
de (95).........................
B i +1 − B i =
∆x (Tq i +1 + Tq i ) / 2
(99)
de (96).........................
β i +1 − β i = − ∆x ( B i +1 + B i ) / ( 2 E Iω )
(100)
de (97).........................
θ i +1 − θ i =∆x ( β i +1 + β i ) / 2
(101)
Substituyendo B i +1 de (99) en (98) y reordenando se tiene
de (98) ..... Tq=
i +1
{ 1 + ( K ∆ x /2) T
de (99) ...... B i +=
1
B i + ∆ xi (Tq i +1 + Tq i ) / 2
(103)
de (100) ... β i +=
1
β i − ∆ xi ( B i +1 + B i ) / (2 E Iω )
(104)
2
i
qi
+ ∆ xi (Ti′+1 + T ′ ) /2 + K 2 ∆ xi Bi
de (101) .... θ i +1= θ i + ∆ xi ( β i +1 + β i ) / 2
} / 1 − ( K ∆ x /2)
2
i
(102)
(105)
189
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
A continuación se define el vector de estado que contiene las cuatro variables
Tq
V ( x) = B
(106)
β
θ i
Condiciones de borde: Por tratarse de una ecuación diferencial de 4to orden deben especificarse
dos condiciones en cada extremo.
Ejemplo:
Para ilustrar el procedimiento nos referiremos a la viga de la Figura 27 con un estado general de
cargas con momentos torsores distribuidos y concentrados. En el empotramiento se conoce que β y
θ son nulos, siendo desconocido el valor del Bimomento (B) y el valor del momento torsor por
restricción al alabeo (Tq).
La solución, V (x) dado en (106), se puede expresar como una combinación lineal de la forma
V ( x) = V0 ( x) + α1 V1 ( x) + α 2 V2 ( x)
(107)
donde V0(x) es una solución particular relacionada con las cargas exteriores ( T ′ = momento torsor
distribuido por unidad de longitud ) y las condiciones no-homogéneas de borde que pudieran ser
especificadas.
Las soluciones V1 y V2 corresponden al problema homogéneo (sin cargas exteriores ) T ′ = 0 y
valores nulos para las variables especificadas en los extremos.
Las tres soluciones se calculan con las fórmulas de recurrencia (102) a (105) recordando que
para V1 y V2 deberá considerarse T ′ = 0 en todos los puntos.
Para iniciar el proceso de integración en x = 0 se adoptan para V0 (0) valores especificados
(conocidos) o de lo contrario se le asignan valores nulos a las variables. Para las soluciones V1(0) y
V2(0) se asocian valores nulos a las variables especificadas porque ya fueron consideradas en V0(0)
y a cada variable desconocida se le asocia un valor unitario en una de las soluciones homogéneas y
un valor nulo en la otra.
Para el problema de la Figura 27, en x = 0 se tiene:
0
0
V1 (0)
=
0
0
=
V0 (0)
1
0
V2 (0)
=
0
0
0
1
0
0
(108)
Aplicando las fórmulas de recurrencia (102) a (105) se llega hasta el extremo x = L donde
deben imponerse las restantes condiciones de borde que permiten determinar los coeficientes α1 y
α2 de la ecuación (107) con la cual se calcula vector de estado en todos los puntos.
Observando (106), (107) y (108) resulta obvio que en este ejemplo α1 = Tq (0) y que α2 = B (0).
En el extremo x = L no actúan fuerzas axiales externas, σ x ≡ 0 , y según (91) y (92) resulta
nulo el Bimomento:
x
=
L ⇒ B
( L)
=
0
→
B0 ( L) + α1 B1 ( L) + α 2 B=
2 ( L)
0
(109)
además, se conoce el momento torsor, T, actuando en el extremo x= L y según (93) resulta
x =
L ⇒ Tq ( L) + G J R β ( L) =
T ( L) →
[Tq 0 ( L) +
(110)
T ( L)
α1 Tq1 ( L) + α 2 Tq 2 ( L)] + G J R [ β 0 ( L) + α1 β1 ( L) + α 2 β 2 ( L)] =
Las ecuaciones (109) y (110) pueden escribirse como
B1 ( L)
Tq1 ( L) + GJ R β1 ( L)
− B0 ( L)
α1
=
Tq 2 ( L) + GJ R β 2 ( L) α 2
T ( L) − Tq 0 ( L) − GJ R β 0 ( L)
B2 ( L)
190
(111)
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
Una vez resuelto el sistema (111) se pueden determinar los valores de las variables que sean
de interés en los puntos de discretización (estaciones) usando (107). A continuación se calculan las
tensiones en los puntos que interesen:
B( x )
(90) →....................................................
σ x(s) =
ω( s )
(112)
(48) y (83) →.........................................
τ SV ( s ) = G β ( x ) t( s )
(113)
(44), (4) y (47) →................................
τ q(s) = −
Iω
Tq ( x ) M ω ( s )
Iω
t( s )
(114)
donde el momento estático sectorial variable M ω(s) está definido en (44).
El procedimiento de integración numérica es completamente general. Se pueden tratar cargas
arbitrarias T ′( x ) distribuidas a lo largo de la viga, la discretización debe permitir seguir correctamente la variación de la carga.
Momentos torsores concentrados
Los puntos donde actúan momentos torsores concentrados deben estar incluidos en la discretización como puntos de integración. Existen dos maneras de plantear el problema:
Variante a) Se distribuye el momento torsor concentrado To, actuando en la coordenada xo de
la viga, en dos intervalos de amplitud ε, uno a cada lado de xo ( ε debe ser muy pequeño). De este
modo las cargas distribuidas T ′( x ) se modifican como se indica a continuación:
x = xo − ε → T ′( xo − ε )
x = xo → T ′( xo ) +
To
ε
x = xo + ε → T ′( xo + ε )
(115)
de esa manera se distribuye la mitad de To en el pequeño intervalo anterior a xo y la misma cantidad
en el intervalo pequeño posterior a xo. Al estar fuertemente concentrada la variación del momento
torsor en las proximidades de xo hay fuerte restricción al alabeo y el Tq sufre una fuerte discontinuidad
mientras que TSV permanece prácticamente constante en esos dos intervalos de amplitud ε muy
pequeña. Esto justifica el uso de la variante b) que es más sencilla de aplicar ya que no requiere
agregar dos puntos próximos a xo.
Variante b) Al llegar a xo se incrementa Tq en el valor del momento torsor To concentrado
Tq ( xo ) = Tq ( xo ) + To
(116)
Secciones con propiedades variables
Hay que remarcar que en la formulación en diferencias finitas (102) a (105) dentro de cada
tramo se considera que las variables son constantes e iguales al promedio de los valores de los
puntos que definen las estaciones.
Una ventaja de la subdivisión del intervalo de integración es que permite considerar que las
propiedades (GJR) y (EIω ) varíen a lo largo de la viga (funciones de x), pero en tal caso hay que
modificar la formulación agregando un término adicional en el segundo miembro de (94) y otro en
el segundo miembro de (96):
dTq
d (GJ R )
(117)
(94) se modifica: .............................. = K 2 B + T ′ − β
dx
dx
(96) se modifica: ..............................
d β d ( EIω )
dβ
B
−
= −
dx
dx
dx
E Iω
(118)
y en consecuencia se modifican las ecuaciones (98) hasta (105).
Finalmente debe remarcarse que la exactitud del método de integración numérica aumenta al
disminuir el paso de integración Δx, pero crece el esfuerzo de cálculo.
191
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
ANEXO DEL CAPÍTULO 10
Fórmulas para torsión: Tensión máxima τmáx y módulo torsional JR
caso
Sección
T D
JR 2
T D
JR 2
τ máz =
2
Módulo torsional
( JR )
Tensión de corte
máxima
τ máz =
1
T
G JR
β =
En todos los casos:
π D4
JR =
JR =
JR =
32
π ( D4 − d 4 )
exacto
32
π
4
( dm )
3
e aproximado
π
a 3 b3
16 a 2 + b 2
3
τA =
16 T
π b a2
4
τA =
20 T
a3
JR =
a4
46, 2
τA =
5,7 T
a3
JR =
a4
8,8
τA =
T
Cτ b a 2
JR =
Triángulo equilátero
5
Hexágono regular
6
b es el lado mayor
x = (a/b) ≤ 1
1
− 0, 225 x + 0,1 x 2
Cτ =
3
=
τ B τ A ( 0,74 + x3 − 0,74 x 4 )
caso b)
...... 0,74 ≤ (τ B / τ A ) ≤ 1
T
t( s )
JR
a)
JR =
∫
τ máx =
T
tmáx
JR
b)
JR =
∑ ⅓
τ (s) =
T
2 Γ t( s )
τ máx =
T
2 Γ tmín
8
Γ es el área encerrada
1
− 0, 211 x + 0,0182 x 4
Cβ =
3
τ (máx
s) =
7
Caso a)
J R = Cβ b a 3
192
JR =
F
I
⅓ t(3s ) ds
4Γ 2
ds
∫ t ( s )
i
ti3
4Γ 2 t
si t es cte. → J R =
perímetro
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
PRÁCTICO
Vigas de Pared Delgada
Nota: Todos los datos están dados en unidades [cm] y [kg]
1 El perfil de chapa doblada del croquis, de pared delgada y sección
abierta, está sometido a un momento torsor T = 100 kg-cm.
Para ganar eficiencia se practica una soldadura en el punto A de
manera de lograr una sección cerrada. Se pide:
a) ¿Cuánto aumenta la rigidez torsional?
b) ¿Cuánto disminuye la máxima tensión de corte por torsión?
2 En el croquis adjunto se bosqueja un soporte de una cañería de 40 cm de altura. Se pide:
1) Calcular la rigidez al giro respecto a un eje vertical (eje z) considerando tres tipos de sección.
2) Comparar los resultados teniendo en cuenta que las áreas de las secciones son iguales, pero
dos secciones son abiertas (a y c) y la restante es cerrada (sección b).
Material:
E = 2100000
Iω =
G = 810000
b3 h 2 t
24
En el caso del dobleté (sección c) considerar restricción al alabeo en la base y alabeo libre en la
parte superior. Como ayuda se da la fórmula para calcular el momento de inercia sectorial Iω .
3 Determinar el módulo torsional y la máxima tensión de corte en la
sección de dos células del croquis. Se trata de un perfil de aluminio
extruido sometido a un momento torsor T = 1500 kg-cm.
a) Cálculo simplificado ignorando el tabique que separa las células
considerando una sección cerrada de una sola célula.
b) Cálculo exacto considerando dos células.
4
Calcular la carga admisible Padm con CS = 2
soportada por el tramo en voladizo del croquis.
Material acero σf = 2800 kg/cm2
Considerar: tensión normal por flexión,
tensión de corte por torsión
y tensión de corte por corte.
193
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
5 Perfil abierto de chapa doblada de 0,2 cm de espesor
Se pide:
a) Determinar el centro de corte aplicando Jourasky.
b) Graficar el área sectorial principal.
c) Calcular el momento de inercia sectorial.
6 Un perfil hueco cuadrado mide 100 cm de largo y el espesor de la chapa es 0,2 cm. Resulta
necesario hacer una modificación según se indica en el croquis para permitir el paso de un
conducto cuyo tendido interfiere con el perfil.
Calcular la rigidez torsional del tramo de 100 cm en
los siguientes tres casos: (material ν = 0,3)
a) Perfil completo en la situación actual.
b) Perfil donde el tramo modificado es una sección
cerrada con una chapa de espesor 0,5 cm
c) Perfil con el tramo modificado con sección abierta.
Para simplificar los cálculos suponer que los 9 cm debilitados tienen una altura constante de 5 cm.
Ayuda: Fórmula para el momento de inercia sectorial Iω de una sección canal.
=
Iω α 2 h5 th 1 + α β (2 z 2 − 6 z + 6) / (12 z 2 )
donde:
α= b / h ; β= tb / th ; z= 2 + 1 / (3α β )
además:...... e = b / z
7 La placa del croquis de 200 cm de largo y 60 cm de ancho está simplemente apoyada sobre dos
perfiles dobleté empotrados en uno de sus extremos y soporta una presión p = 0,04 kg/cm2.
Debido a la rotación de la placa, suponer que la carga distribuida sobre los perfiles actúa en el
extremo del perfil (punto P en los croquis b y c).
Para el tramo en voladizo de la derecha ( perfil dobleté, E = 2100000 kg/cm2 y G = 808000 kg/cm2 ),
se pide:
1) Dar la solución analítica para el problema de torsión.
2) Dar la solución numérica empleando Δx = 20 cm.
3) Calcular el giro en el extremo libre aplicando Saint Venant y comparar con el resultado
correcto calculado en 1) y 2).
4) Calcular la máxima tensión en el empotramiento debido a la flexión, corte y torsión.
194
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
SOLUCIÓN del PRÁCTICO
Vigas de Pared Delgada
Nota: Todos los resultados parciales y finales se dan unidades [cm] , [kg] y radianes.
1 Comparación de la rigidez y resistencia de dos secciones similares, una abierta y otra cerrada.
1.1 Sección abierta. Se utilizan las fórmulas del caso 7-b del Anexo del Cap. 10 de página 192:
J R = ∑ i ti3 / 3= [ (3,5 + 3,8 + 3,7) x 0, 23 + 4,9 x 0, 43 ] / 3 ............. J R = 0,1339
=
τ máx (T=
/ J R ) tmáx = ( T /0,1339) x 0, 4 .................................. τ máx = 2,987 T
1.2 Sección cerrada ignorando la pestaña (caso 8 del Anexo del Cap. 10)
Área encerrada por la sección cerrada: Γ = 3,7 X 3,8................. Γ = 14,06
Ec. (13)-a
→ JR
=
4Γ =
/ ∫ ds / t ( s ) 4 x (14,06)2 / [ (3,7 + 3,8 + 3,7) / 0, 2 + 3,8 / 0, 4] ....... J R = 12,072
2
T=
/ (2 Γ tmín ) T / (2 x14,06
=
x 0, 2) 0,1778 T .................................. τ máx = 0,17781 T
Ec.
(7) → τ máx
=
1.3 Sección cerrada con una pestaña rectangular ( Notación: c = cerrada ; p = pestaña)
Caso 6 Anexo →
x = 0, 4
→ Cβ
1/3 − 0, 211 x + 0,0182 x 4 =
0, 249 ; Cτ =
1/3 − 0, 225 x + 0,1 x 2 =
0, 259
=
Módulo de torsión: J Rp = 0,249 x 1x 0,4 = 0,016 → Conjunto: JR = J Rc + J Rp =12,072+0,016... J R = 12,088
3
Ec. (12)-b →
Por tener igual giro los dos elementos toman momentos proporcionales a sus rigideces:
T c = 0,9987 T Caso 8 → τ c 0,9987
x T /(2 x14,06 x 0, 2) 0,17758 T
=
=
..
p
c
p
c
p
p
2
= 0,0013 T Caso 6 → τ
T / T = J R / J R T=
x T / (0, 259 x1 x 0, 4 ) 0,03137 T
=
0,0013
T= T + T
c
p
τ máx = 0,17758 T
CONCLUSIONES:
a) El módulo de torsión se multiplica por 90 (0,1339→12,09), la pestaña sólo agrega 0,1 %.
b) La tensión de corte se reduce un 94 %, (2,99→0,178 ) la pestaña sólo reduce 0,2 % más.
2 Comparación de la rigidez al giro de tres barras que tienen igual largo y secciones de igual área.
2.1a Sección rectangular ( Fórmula del caso 6 del Anexo del Cap. 10 de la página 192)
1/ 3 − 0, 211 x 0,1 + 0, 0182 x 0,14 =
0,3122 → J R = 0,3122 x10 x 13 ..... J R = 3,122
=
x 1/10
= 0,1 → Cβ =
Rigidez al giro: θ = TL / (G J R ) → T /θ = 810000 x 3,122/40 ..................................... T /θ = 63220
2.1b Sección cerrada cuadrada de espesor constante que no alabea ( ver Figura 9)
Ec. Error! Reference source not found. →
β =θ /L
Ec. (11)-b →
β = [ T / (4 G Γ 2 )]
∫ ds / t
=
T /θ 4=
GΓ 2 / ( L ∫ ds / t ) 4 x810000 x (10 x10) 2 / [40 x (4 x10) /0, 25] ........................ T /θ = 5062500
2.1c Sección abierta dobleté que alabea pero tiene restricción al alabeo en un extremo (ver Secc. 6)
Caso 7 Anexo →JR = ⅓ (7,5+10+7,5)x0,4
3
Ec. (51) →
K
3 2
= 0,53333;
=
Iω b=
h t /24 7,53 x 102 =
x 0,4 /24 703,12 L = 40
=
G J R /( E Iω ) = 810000 x 0,53333 / ( 2100000 x 703,12) 0,0171 ......... KL = 0,6842
tanh ( K L)
TL
KL
] → T /θ = G J R
1−
............ T /θ = 82100
G JR
KL
L K L − tanh ( K L)
Comparación: La sección cerrada (caso b) tiene una rigidez 80 veces mayor que la sección
rectangular (caso a) y 61 veces mayor la sección dobleté con restricción al alabeo (caso c).
=
Ec. (79)
→ θL
[
Si se ignora la restricción al alabeo la rigidez del dobleté toma un valor mucho menor (87 % inferior)
Ec. (12) o (48) → Giro de Saint=
Venant: θ SV
T=
L /( G J R ) T x 40 / (810000=
x 0,5333) T /10800
195
T /θ = 10800
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
3 Cálculo de la máxima tensión de corte por torsión de una sección de dos células.
3.a Cálculo simplificado ignorando el tabique que separa las células (ver caso 8 del Anexo)
Área encerrada: Γ = 2 x 2 + 4 x 2 = 1 2 Módulo de torsión: J R = 4Γ 2 / ∫ ds / t ( s )
4
=
J R 4 x 12 2 / (6 / 0, 2 + 10 / 0,1) .................................................... J R = 4, 431 cm
2
Tensión máxima:
=
τ máx TΓ
=
/(2
t
1500 /( 2 x 12 x 0,1) ..... τ máx = 625 kg / cm
mín )
3.b Cálculo considerando dos células
Ec. (16) →
2β G Γ 1
q1 x 6 / 0, 2 + (q1 − q2 ) x 2 / 0, 2 =
2β G Γ 2
q2 x10 / 0,1 + (q2 − q1 ) x 2 / 0, 2 =
Ec. (20) →
40 −10 q1 4
⋅ =
−10 110 q2 8
Resolviendo:
=
q1 0,12093
=
; q2 0,08372
Ec. (22) →
JR =
4
∑Γ
i
qi =
4 x ( 4 x 0,12093 + 8 x 0,083721) =
4,61 ....................
J R = 4,614 cm 4
Ec. (21) →
=
β T / [ 2(Γ 1 q1 + Γ 2 q 2=
)] 1500 /[2 x (4 x 0,12093 + 8 x 0,083721)] ............... β = 650, 20
Ec. (21) →
=
q1 β=
q1 650, 2 x 0,12093
= 78,629
; =
q2 β=
q2 650, 2 x 0,08372
= 54, 435
Flujo de corte en el tabique: q3 = q1 − q2 = 78,629 − 54, 435 = 24,194
Tensión máxima:
=
τ máx mayor
=
{ qi / ti } mayor { 78,629 / 0, 2 ; 54, 435/ 0,1; 24,194 / 0, 2 }
= mayor
=
{ 393,14 ; 544,35 ; 120,97 } 544,35 ...
τ máx = 544, 4 kg / cm 2
Conclusión: Al considerar el tabique, el módulo torsional se incrementa un 4 % y la tensión máxima
se reduce un 13 %, pero estos resultados que eran de esperar no pueden generalizarse.
A modo de ejemplo se analiza el caso de agregar un segundo tabique como se muestra en el croquis. En
ese caso el módulo torsional crece levemente cuando crece el espesor del segundo tabique, mientras
que paradójicamente la tensión máxima de corte por torsión crece monótonamente con el espesor !!!
El resultado inesperado se debe a la redistribución de tensiones que incrementa la
tensión abajo en la parte izquierda y la disminuye abajo en la parte derecha.
Espesor del tabique adicionado: t
Módulo de torsión:
JR
Tensión máxima de corte:
τmáx
4 Cálculo de la carga admisible P
adm
0
4,614
544,4
0,1
4,704
612,2
0,2
4,729
630,4
0,3
4,738
638,8
soportada por un tramo en voladizo con CS = 2.
Esta sección rectangular espesor constante ‘casi’ no alabea (ver Figura 9), por lo
tanto la restricción al alabeo en el empotramiento no tiene incidencia.
El momento de inercia se calcula como sección de pared delgada concentrando
las áreas en la línea media.
4
=
I 2 x ( 4 x 0,12 ) x 2,52 + 0,12 x 53 / 12 ................................... I = 8,50 cm
M
P x 12
Tensión por flexión en A:
x 2,5 .......... σ = 3,529 P
=
σ
=
ymáx
I
8,5
T
P x8
Tensión por torsión: caso 8 del Anexo
... τ t = 1,667 P
=
τt =
2 Γ t 2 x (5 x 4) x 0,12
Momento estático en el punto A: S A = (2 x 0,12) x 2,5 ............. S A = 0,60
Tensión de corte por corte en A:
Ec. (58)
→ τc
=
Tensión efectiva de Von Mises en A: σ * =
Carga admisible con CS = 2:
Q=
S A / ( I t ) P x 0,6 / (8,5 x 0,12 ) ..... τ c = 0,588 P
σ 2 + 3τ 2 =
3,532 + 3 (1,67 + 0,59) 2 P .... σ * = 5, 27 P
σ f /σ* =
CS → 2800 / (5, 27 Padm ) =
2 ........... Pmáx = 265,6 kg
196
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
5 Determinación de propiedades de una sección canal de pared delgada de chapa doblada.
a) Determinación del centro de corte
F1, F2 y F3 son las integrales de los flujos de corte en los tres tramos cuya resultante es el esfuerzo de
corte Q que pasa por el centro de corte. El momento de inercia se calcula
como sección de pared delgada concentrando las áreas en la línea media.
=
I 2 6 x 0, 2 x 32 + 0, 2 x 63 /12 ................................................. I = 25, 2 cm 4
Tramo
1: S 1 (0,
=
=
2 x s1 ) x 3 0,6 s1
q ds ( Q / I ) ∫
∫=
6
=
F1
1
0
1
6
0
0,6
=
s1 ds
Ec. (58).→
. q1
=
S=
0,6 x s1 x Q / I
1 Q /I
( Q / 25, 2 ) x 0,6 x 62 / 2 ....
F1 = 0, 42857 Q
Tomando momento respecto al punto A no hace falta calcular ni F2 ni F3.
Q x e = F1 x 6 ⇒ Q x e = ( 0, 42857 Q ) x 6 .............................. e = 2,5714 cm
b) Gráfico del área sectorial principal
Para calcular el área sectorial principal se usa el centro de corte como polo (punto P del croquis), y
aprovechando la simetría se ubica el punto inicial sobre el eje de simetría, obteniendo así un gráfico
antisimétrico que asegura que el momento estático sectorial es nulo.
Tramo I → B
Tramo B → A
s1
2,57 ds 2,57 s
∫=
Ec. (23) → ω ( s ) =
7,71 − 3 s
ω − ∫ 3 ds =
Ec. (23)
→ ω (s )
=
1
2
=
ωB ω=
2,57 x 3 ........... ωB = 7,71 cm
(3)
1
0
ω A = −10, 29 cm 2
=
ω A ω=
(6) 7,71 − 3 x 6 .....
s2
B
2
2
0
c) Cálculo del momento de inercia sectorial
Se utiliza la Ec. (26) y los valores de aérea sectorial principal obtenidos en la parte b.
Iω =
34,397
( 2,57 s ) 0, 2 ds 11,889
∫=
∫ ( 7,71 − 3 s ) 0, 2 ds =
Ec. (26) → I = ∫ [ω ( s ) ] t ds = 2 ( I + I ) = 2 (11,889 + 34,397 ) ...... I ω = 92,57 cm
=
I ω1
3
6
2
1
0
F
ω
1
2
0
2
2
2
2
6
ω1
I
ω2
NOTA: Los resultados obtenidos en la parte a (e = 2,57) y en la parte c ( Iω = 92,57) concuerdan
con los valores provistos por las fórmulas dadas como ayuda en el enunciado del problema 6, para
la sección canal.
6 Determinación de la rigidez torsional de un perfil de pared delgada de 100 cm en tres situaciones.
En los tres casos se comienza calculando el giro producido por un momento torsor genérico T.
Notación: el subíndice 9 se usa para el tramo debilitado de 9 cm y 91 para el tramo restante de 91 cm.
a) Perfil cuadrado de espesor constante 0,2 cm que no alabea (ver Figura 9 y caso 8 del Anexo)
2
Área encerrada:
Ec. (11) b → β = [ T / (4 G Γ )]
=
Γ 9,8
=
x 9,8 96,04
∫ ds / t
β = [ T / (4 x G x 96,04 2 )] [(4 x 9,8) / 0, 2] ........................... β = 0,0053124 T /G
θ=
β=
L
100
=
( 0,0053124 T / G ) x 100
0,53124 T / G ............. T /θ = 1,8824 G
b) Perfil de 100 cm debilitado con una sección cerrada de 9 cm de largo
β=
Rigidez del tramo intacto de 91 cm: θ=
91
( 0,0053124 T / G ) x 91 ..........
θ91 = 0, 48343 T /G
En el tramo de 9 cm se puede ignorar el alabeo porque las secciones cerradas alabean muy poco.
Área encerrada:
=
Γ 9 9,8
=
x 4,65 45,57
Ec. (11) b→
=
β 9 [ T / (4 x G x 45,57 2 )] [(4, 65 x 2 + 9,8) / 0, 2 + 9,8 / 0,5]
β = [ T / (4 G Γ 2 )]
∫ ds / t
θ 100 = θ91 + θ 9 = 0, 48343 T / G + ( 0, 013857 T / G ) x 9 → θ 100 = 0, 60814 T / G →
197
β 9 = 0, 013857 T /G
T /θ = 1,6444 G
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
c) Perfil de 100 cm debilitado con una sección abierta de 9 cm de largo
Rigidez del tramo debilitado de 9 cm: La sección canal tiene muy poca rigidez torsional debido al
alabeo, pero en este caso se trata de un tramo muy corto de 9 cm cuyos
extremos tienen restringido el alabeo por el resto del perfil.
Caso 7 Anexo → =
JR
(9,8 + 2 x 4,9) x 0, 23 /3 ................................. J R = 0,052267
Momento de inercia sectorial:
=
b 4,9
=
; h 9,8
=
; tb 0,=
2 ; th 0, 2
0,5 ; β =
1 ; z 2 + 1 / (3α β ) =
2,667
b /h =
tb / th ==
α=
=
I w α 2 h5 th 1 + α β (2 z 2 − 6 z + 6) / (12 z 2 ) ............................. I w = 164,777
G J R /( E Iω ) 0,011045 .... KL = 0,09941
=
ν 0,3 ; G
= E / [2(1 + ν )] ⇒ =
E=
2,6 G K =
2
[T L / (G J )] { 1 + [cosh ( K L) − 1] / [ K L senh ( K L)] − senh ( K L) / ( KL) }
Ec. (88)
→ θ9
=
R
=
L 9=
;
senh ( K L) 0,09957=
;
cosh ( K L) 1,00495 ...............................
θ 9 = 0,14164 T / G
θ 100 = θ91 + θ 9 = 0, 48343 T / G + 0,14164 T / G → θ 100 == 0,62507 T / G →
T /θ = 1,5998 G
En el caso c de la sección abierta, la rigidez torsional se reduce el 15 % y en el caso b de la sección
cerrada se reduce el 12,6 %, por lo tanto cerrar la sección sólo agrega un 2,8 % de rigidez torsional.
CONCLUSIÓN: Se puede dejar la sección debilitada abierta sin mayor pérdida de rigidez.
7 Análisis de un tramo en voladizo de sección dobleté solicitado a torsión y flexión.
Carga en cada voladizo: P = (0,04 x200 x 60)/2 = 240
Carga distribuida : ……..…………. q = 240/60 = 4
La excentricidad de la carga provoca torsión.
Excentricidad de la carga: ………. e = b/2 = 8/2 =4
Torsor distribuido: ………..… T ’ = q e = 4 x 4 = −16
Momento torsor función de x: …….. T = 960 – 16 x
7.1 Solución analítica del problema de torsión
En el caso de variación lineal del momento torsor, el giro está dado por la ecuación (55).
Ec. (55) →
θ =C1 + C2 x + C3 senh ( K x) + C4 cosh ( K x) + T ′ x 2 / ( 2 G J R )
Derivando:
θ′ =
C2 + K C3 cosh ( K x) + K C4 senh ( K x) + T ′ x / ( G J R )
Derivando:
θ ′′ = K 2 C3 senh ( K x) + K 2 C4 cosh ( K x) + T ′/ ( G J R )
θ ′′′
=
Derivando:
K 3 C3 cosh ( K x) + K 3 C4 senh ( K x)
Propiedades torsionales de la sección dobleté:
JR =
∑ t
3
i i
/ 3 = [ (8 + 10 + 8) x 0,53 ] / 3 → J R = 1,083333 G J R = 1,083333 x 808000 → G J R = 875333
3 2
Iω b=
h t /24 83 x 102 x 0,5 /24 → Iω = 1066,667
=
Ec. (51) →
K=
G J R /( E Iω ) =
EIω = 1066,67 x 2,1 x106 → EIω = 2, 24 x10 9
875333 / 2, 24 x109 ................................................. K = 0,019768
Condiciones de borde:
0
θ =
x=0
θ ′ =0
→
C1 + C4 =
0
→
C1 =
− C4 .............................................C1 =
− C4
→
C2 + K C3 =0
→
C3 =− C2 / K
............ C3 = T ′ / ( K G J R )
T =
0 Ec. (50) → θ ′′′() − K 2θ ′() =
0 → C2 =
−T ′ / (GJ R ) .....................C2 =
−T ′ / (G J R )
x=
T ′ 2 tanh ( K )
1
′′
σ
θ
→
→
Ec.
(90)
Ec.
(90)
=
=
=
=
−
+
0
B
0
(
)
0.......
C
x
4
2
G JR
K
( K ) cosh ( K )
Evaluando: C1 = – 0,0721471147 C2 = 0,0010967255 C3 = – 0,0554798515 C4 = 0,0721471147
198
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
7.2 Solución numérica del problema de torsión empleando xΔ= 20 cm
Se consideran sólo tres tramos pero la solución obtenida es exacta independiente de cuantos tramos
se utilicen dado que T ’ es constante. La única limitación es que la solución se conocerá sólo en los
4 puntos de discretización adoptados (estaciones).
n=
3 → ∆ xi =
60 /3 =
20
T′ =
−16
K=
0,01976799587
La secuencia de avance en las sucesivas estaciones de integración es la siguiente:
Tq i +1
Ec. (102) →=
1,081333012 Tq i + 10, 40666506 ( Ti′+1 + Ti ′ ) + 0,008133012 Bi
Ec. (103) →
B i +1 =
B i + 10 ( Tq i +1 + Tq i )
Ec. (104) →
β i +1 =
β i − 4, 464285714 x 10−9 ( B i +1 + B i )
Ec. (105) →
θ i +1 =
θ i + 10 ( β i +1 + β i )
Estación
x
T’
Tq
B
β [10- 6 ]
θ [10- 6 ]
1
2
3
4
0
20
40
60
−16
−16
−16
−16
0
−333,01
−720,20
−1224,53
0
−3330,13
−13862,23
−33309,51
0
14,8667
91,6183
302,2064
0
148,67
1213,52
5151,77
V1 ( x )
1
2
3
4
0
20
40
60
0
0
0
0
1
1,08133
1,33856
1,81353
0
20,8133
45,0123
76,5332
0
− 0,09292
− 0,38678
− 0,92939
0
− 0,92917
− 5,72614
− 18,88790
V2 ( x )
1
2
3
4
0
20
40
60
0
0
0
0
0
0,00813
0,01759
0,02991
1
1,08133
1,33856
1,81353
0
− 0,0092917
− 0,0200948
− 0,0341666
0
− 0,09292
− 0,38678
− 0,92939
V0 ( x )
Solución
particular
Ec. (111) →
− B0 ( L)
α1
=
Tq 2 ( L) + GJ R β 2 ( L) α 2
T ( L) − Tq 0 ( L) − GJ R β 0 ( L)
B1 ( L)
B2 ( L)
Tq1 ( L) + GJ R β1 ( L)
76,5332
1
1,81353 α1
=
0 α 2
33309,5
960
→
960
=
q (0)
α1 T=
α 2 = B (0) = − 22146
Mediante la Ec. (107) se obtiene la solución en las estaciones: V ( x ) = V0 ( x ) + α1 V1 ( x ) + α 2 V2 ( x )
Estación
1
2
3
4
x
[cm]
0
20
40
60
Tq
[kg-cm]
960,000
524,947
175,284
−145,865
B
[kg-cm2]
−22145,96
−7296,50
−294,19
0
β
[ rad /cm ]
0,00000000
0,00013144
0,00016533
0,00016664
La última columna se obtiene usando la Ec. (49)-a :
Tq + TSV =
T
A derecha se muestra el gráfico del momento torsor T
y sus dos componentes Tq y TSV. Hay que destacar que
en el extremo de la viga las dos componentes son
iguales pero tienen de distinto signo y de ese modo la
suma da cero. Como la viga es “corta” la restricción al
alabeo juega un rol muy importante.
199
θ
[ rad ]
0
0,0013144
0,0042821
0,0076017
T
[kg-cm]
960
640
320
0
TSV
[kg-cm]
0
115,053
144,716
145,865
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
7.3 Cálculo del giro en el extremo libre aplicando Saint Venant
Solución de Saint Venant: (totalmente inaceptable !!)… T =
960 − 16 x ;
L
L
0
0
β dx ∫
∫=
θ SV
=
Ec. (48) →
( T / GJ
=
R ) dx
(960 x − 16 x 2 /2) / 875333
x =60
x =0
GJ R =
875333
............ θ SV = 0,03290
θ =C1 + C2 L + C3 senh ( K L) + C4 cosh ( K L) + T ′ L2 / ( 2 G J R )
θ =
+ 0, 07215 + 0, 0011x 60 − 0, 05548 x 1, 4844 + 0, 07215 x 1, 7898 − 16 x 602 /(2 x 875333) θ = 0,00753
Solución numérica: Ec. (107) → θ (60) =
θ 0 (60) + α1 x θ1(60) + α 2 x θ 2 (60)
=
θ [5151,763 + 960 x (−18,8879) − 22145,96 x (− 0,929395)+] x 10−6 …………………….. θ = 0,00760
Solución analítica:
Ec. (55) →
Comentario: La solución numérica y la analítica coinciden y dan el resultado correcto (0,00753),
pero la solución de Saint Venant no es aplicable porque tiene un error del 337 % en exceso (0,03290) !!!
7.4 Cálculo de la máxima tensión en el empotramiento debido a la flexión, corte y torsión
Sección
Área sectorial
Momento estático sectorial
Momento estático
2
3
σ1 Tensión normal por flexión: Momento=
de Inercia: I 2 x (8 x 0,5) x5 + 0,5 x 10 /12 .... I = 241,667
M / I ) h /2 (7200 /241,667)
=
x 5 149 …………....…..……………… σ 1 = 149
→ σ (=
M = 7200=
ω(4) =
− 5 x4 =
−20
σ2 Tensión normal secundaria (considerando alabeo): Área sectorial: ω( s1 ) = − 5 s1 → ω( B ) =
ω(4) B( o ) /Iω =
−20 x (−22146) /1066,667
σ x ( s ) = ω( s ) B( x ) /Iω → σ 0(4) =
Ec. (37) ó Ec. (112) →
σ 2 = 415
τ1 Tensión de corte de Saint Venant (ignorando alabeo)
J R = 1,08333 →
Caso 7 del Anexo del Cap =
10: τ max
T / J R ) t (960 /1,083333) x 0,5 …….... τ 1 = 443
(=
τ2 Tensión de corte secundaria (considerando alabeo) Área sectorial entre B y A: ω( s ) =
ω( B ) + s2 (h /2) =
−20 + s2 5
2
s′ s =
s2 s
=
Ec. (44) →
MωA =
∫
ω( s′) t( s′) ds′ =
∫
s ′ 0=
s2 0
=
τ
Ec. (114)=
→
qA
(−20 + 5 s2 ) x 0,5 x ds2 =−
[ 20 s2 + 2,5( s2 ) 2 ] x 0,5
s2 = 4
s2 = 0
=
− 20
− Tq M ω A /=
( Iω t A ) − 960 x (−20) / ( 1066,67 x 0,5 ) …..............…….…. τ 2 A = 36
τ3 Tensión de corte por corte: Momento estático entre B y=
A: S s (=
s2 t ) h /2 2,5 s2 S A=
= 2,5 x 4 10
2
Ec. =
(58) → τ 3 A
241,667) 19,86 ………………….…………. τ 3 A = 20
Q=
S A / (t I ) 240 x 10 / 0,5 x=
σ1 por flexión
σ2 secundario
τ2 corte secundario
τ3 corte por corte
Gráfico de la tensión efectiva de Von Mises en la semiala superior derecha entre los puntos A y B
Tipo de tensión
σ1 por flexión
σ2 secundaria
τ1 Saint Venant
Cortante τ2 secundaria
τ3 por corte
Normal σ
Resultante Corte τ
Von Mises σ*
Normal
Ignorando alabeo
Punto A Punto B
Considerando alabeo
Punto A Punto B
149
----
149
----
149
0
149
415
443
---20
443
---0
0
36
20
0
0
0
149
463
816
149
443
782
149
56
178
564
0
564
Conclusión: Considerando el alabeo, la tensión efectiva máxima se reduce un 31 % (baja de 816 a
564 kg/cm2 ), además como se vio en el punto anterior el giro por torsión del extremo libre se reduce
un 77 % (baja de 0,03290 a 0,00753 rad.). La restricción al alabeo en el extremo empotrado de la
viga en voladizo, torna a la viga más rígida y más resistente desde el punto de vista de la torsión.
200