tema 5. generadores y sintetizadores de señales
Anuncio

5
Generadores y Sintetizadores de
Señales
5.1 Introducción
Las pruebas de calibración, test y mantenimiento de instrumentos y circuitos
electrónicos en general, requieren la utilización de fuentes o generadores de señales de
referencia calibradas y estables. En este capítulo se estudian los instrumentos para la
generación de estas señales de referencia y las prestaciones que los caracterizan con el
fin de seleccionar el más adecuado a los requisitos exigidos por la aplicación.
Se presta especial atención a los sintetizadores indirectos de frecuencia, basados en el
PLL (Phase Locked Loop; lazo de enganche de fase), ya que estos instrumentos
consiguen muy buen equilibrio coste/prestaciones; por lo que en la actualidad, los
modelos basados en el lazo de realimentación no lineal no suelen emplearse por poco
que sea de exigente la aplicación de test que lo requiera. Sin embrago, éstos se estudian,
aunque de forma superficial, con el fin de establecer un punto de partida en el estudio
de las mejoras introducidas en la tecnología de instrumentos.
2 Técnicas y métodos de generación de señales
Comúnmente se emplean las siguientes técnicas de generación:
•
•
•
Audiofrecuencia (AF): 0,01 Hz- 10 MHz.
Radiofrecuencia (RF): 1 kHz-1 GHz.
Microondas: 1-40 GHz.
El empleo de una técnica no significa que se generen frecuencias dentro de esa banda.
Los métodos de generación son en esencia dos:
•
•
Variación de la frecuencia de un oscilador patrón, y
Síntesis de frecuencias.
1
Instrumentación Electrónica. Juan José González de la Rosa
Otro criterio de clasificación que suele emplearse es la forma de onda de la salida:
•
•
•
•
•
•
•
Generadores de funciones matemáticas,
Generadores de señales sinusoidales moduladas,
Generadores de barrido,
Osciladores de precisión,
Generadores de pulsos,
Generadores de funciones a la carta y ruidos “blanco” y “rosa”.
Generadores de palabras digitales, etc.
3 Generadores de funciones matemáticas
Estos instrumentos entregan señales que pueden describirse mediante ecuaciones y
fórmulas matemáticas.
3.1 Esquema de bloques
Se basa en la estructura o circuitos del lazo de realimentación no lineal. El ejemplo 1
muestra el funcionamiento cualitativo basado en un circuito electrónico.
3.2 Elementos de ajuste en el generador de funciones
El bloque de realimentación del ejemplo 1 se denomina oscilador principal, y genera las
señales cuadrada y triangular. Las señales generadas por el oscilador principal pasan a la
etapa de salida donde se las procesa para generar en el terminal de salida del instrumento
una señal con impedancia de salida adecuada a la aplicación en curso; lo usual es 50 Ω.
La corriente del integrador se corrige mediante dos generadores de corriente
controlados por tensión. Las entradas de estos generadores de corriente son el resultado
del ajuste fino de frecuencia y del establecimiento de la simetría de la señal; que
determina la duración de los semiciclos positivo y negativo (ciclo de trabajo). El
diagrama de bloques de la figura 1 muestra la acción de control mencionada.
+ ∆V MILLER
Fuente de
+ ∆IMILLER
Señales
corriente
Oscilador principal
cuadrada y
controlada
no lineal
- ∆V MILLER
I
MILLER
∆
triangular
por tensión
Fig. 1. Ajuste de la frecuencia y del ciclo de trabajo corrigiendo la corriente del integrador
“Miller.
Las entradas de tensión que ofrecen las salidas de corrección de corriente de la figura 1
provienen de las salidas diferenciales de un amplificador diferencial corregidas por el
ajuste de simetría. A su vez, la entrada de este amplificador diferencial de salida dual es
el resultado de la suma de tres señales de CC:
•
•
•
2
Ajuste fino de frecuencia,
entrada externa VCO (Voltage Controlled Oscillator),
entrada del generador de control.
5 Generadores y Sinterizadotes de Señales
El generador de control permite realizar un barrido en frecuencia aplicando una señal de
diente de sierra. Si el barrido es lineal el generador ofrece cada frecuencia durante el
mismo tiempo; en caso de ser logarítmico se emplea el mismo tiempo por décadas.
Cuando actúa el generador de control se inhiben las señales de ajuste fino y de VCO.
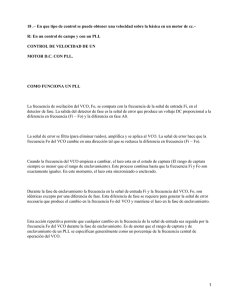
Ejemplo 1. La figura 1 Ej1 muestra un ejemplo de circuito electrónico que implementa un generador
de funciones. El circuito muestra el comparador regenerativo unido al integrador “Miller”,
cuya salida es la entrada del primero.
C
+V
+
(1- α)Roff
αRoff
-V
(1-β
β)RF
-
vo1
-
R2
R1
-
AO1
AO2
+
v o2
+
β RF
(1-χ)Rs
Dz1
+V
χRs
-V
Dz2
Fig. 1. Ej. 1. Lazo de realimentación no lineal basado en circuitos
con amplificadores operacionales.
La figura 2 Ej. 2 muestra las señales que entrega este circuito en la que se observa la
generación simultánea de señales cuadradas y triangulares.
(V)
v o2
v o1
V z1
V1
t (ms)
0
V2
T
V z2
Fig. 2. Ej. 2. Señales generadas por el circuito de la figura 1. Ej.1.
Se aprecia en la figura anterior que la frecuencia de las señales de salida dependen de la
constante de tiempo del integrador, de la relación de división β y de los valores
extremos de la salida, dados por los diodos “Zéner”. En concreto, el periodo de la señal
viene dado por:
T = 2⋅
R1
⋅ C ⋅ (V1 − V 2 )
Vz
3
Instrumentación Electrónica. Juan José González de la Rosa
3.3 Aplicaciones de los generadores de funciones
La señal cuadrada se emplea para test de velocidad en la medida de tiempos de subida y
bajada. La señal triangular se usa para verificar la linealidad de los circuitos. La señal
senoidal se emplea para realizar barridos en frecuencia y obtener la respuesta en
frecuencia de circuitos electrónicos.
4 Generadores de pulsos
4.1 Fundamentos
Estos instrumentos ofrecen pulsos o trenes de pulsos de tensión y/o corriente. Un
pulso viene descrito por:
•
•
•
•
Retardo respecto a una referencia interna del instrumento
duración o anchura,
transiciones o tiempos de subida y de bajada, y
periodo.
4.2 Aplicaciones
Los pulsos se emplean como estímulos de circuitos electrónicos con el fin de examinar
su velocidad y tiempo de respuesta. Se emplean los pulsos dobles para medir la
velocidad de recuperación de los circuitos.
4.3 Diagrama de bloques
La figura 2 muestra el diagrama de bloques.
Oscilador
principal
Monoestable
de retardo
Monoestable
de anchura
Transiciones:
Subida y Bajada
Generación de señal para
sincronismo con otro equipo
Recorte o
limitación
Amplitud e
impedancia
Salida
Fig. 2. Diagrama de bloques de un generador de pulsos.
5 Osciladores controlados por tensión (VCO)
5.1 Definiciones y diagrama de bloques
El oscilador controlado por tensión es un convertidor de tensión analógica a una señal
cuadrada cuyos niveles lógicos dependen de la tecnología de fabricación. El más común
es el 566 fabricado por Signetics (entre otros fabricantes, NE/SE566).
La figura 3 muestra el diagrama de bloques. La figura 4 muestra el montaje
experimental. Tiene dos salidas separadas. La resistencia y el condensador externos
determinan la frecuencia del oscilador. El condensador se carga y se descarga a
velocidad constante a través de R0 y C0. Esta carga y descarga a corriente constante es
característica del integrador “Miller” y provoca la señal triangular; la señal cuadrada se
obtiene haciendo pasar la triangular por un disparador de Schmitt.
4
5 Generadores y Sinterizadotes de Señales
La frecuencia de la salida en los terminales 3 y 4 responde a la siguiente ecuación:
fo =
2
R0 C 0
v
⋅ 1 − i
V
cc
(1)
En (1) he puesto el subíndice “o” (de output) “salida” y hablo de “fo” cuando se aplica
entrada exterior, y de “fFR” en ausencia de entrada, cuando el circuito oscila libremente.
Realizado un montaje experimental en ausencia de entrada (con el terminal 5 sin
conectar a la entrada) se obtiene, a partir de la ecuación (1), un valor concreto de
frecuencia a partir de la tensión en dicho terminal 5, que origina el propio circuito:
V
⋅ 1 − 5 =
Vcc
10,43
= 4
⋅ 1 −
= 556,73759 ≈ 557 Hz
−9
12
10 (Ω) ⋅ 47 ⋅10 ( F )
f FR =
2
R0 C 0
v
⋅ 1 − i
Vcc
2
2
=
R C
0 0
Esta es la frecuencia de las señales triangular y cuadrada que se miden en las patas 3 y 4
del circuito integrado 566.
Vcc=+12 V
R0=10 kΩ
Ω
vi
Fuentes de
corriente
Disparador
de Schmitt
Amplificador
Aislador,
Buffer
Amplificador
Aislador,
Buffer
cuadrada
triangular
C0=0,047 µF
Fig. 3. Diagrama de bloques del VCO digital integrado 566.
Aparecen como componentes externos el condensador y la
resistencia, que determinan la frecuencia de oscilación.
Esta frecuencia se denomina frecuencia de oscilación libre1, o frecuencia en ausencia de
entrada. También se llama frecuencia de reposo o central. Es la frecuencia propia de un
oscilador, y se calcula a partir de la tensión en el terminal “5” del VCO, en ausencia de
entrada, mediante un simple divisor de tensión a partir del circuito de la figura 4:
V5 = Vcc
1
R2
10 (kΩ)
= 12 (V )
≅ 10,434783 (V ) ≈ 10,43 (V )
R1 + R 2
1,5 (kΩ) + 10 (kΩ)
Free Running frequency: traducción de la denominación internacional que proporciona el subíndice.
5
Instrumentación Electrónica. Juan José González de la Rosa
Si el valor de la resistencia R1 se incrementa hasta 2 kΩ, la tensión en el terminal V5
pasa a valer:
V5 = Vcc
R2
10 (kΩ)
= 12 (V )
= 10 (V )
R1 + R 2
2 (kΩ) + 10 (kΩ)
Consecuentemente, la frecuencia de oscilación aumentará según (1):
f FR =
V
⋅ 1 − 5
V cc
2
R0 C 0
2
4
10
=
10 4 (Ω) ⋅ 47 ⋅10 −9 ( F ) ⋅ 1 − 12 = 0,00564 = 709 Hz
Simplemente por tener otra cuenta, pruébese que con R1=1 kΩ, R2=9 kΩ y C0=0,027
µF, sale V5=10,8 V y fo=617,3 Hz.
Como se observa en la figura 4, aplicando mediante un condensador de acoplo una
entrada podemos conseguir señales de frecuencia modulada (FM). Por ejemplo, si la
entrada es sinusoidal de frecuencia 1 kHz de valor medio nulo y 2 Vpp, en teoría se
sumará y restará 1 a la tensión de reposo del terminal 5 para obtener los dos valores
extremos de la frecuencia de oscilación; la frecuencia de oscilación de la salida variará
con 1 kHz de frecuencia (frecuencia de la señal sinusoidal de entrada). Estos dos valores
se sitúan a ambos lados de la frecuencia de reposo, que por ello se la denomina central.
Vcc
R1=1,5
kΩ
Ω
R0
Cac
V5 Cdesac
vi
R2=10
kΩ
Ω
6
5
8
cuadrada
VCO 3
566
triangular
4
1
7
C0
Fig. 4. Montaje experimental con el VCO 566; se
detallan los terminales.
Con el fin de calcular los dos valores extremos entre los que oscila la frecuencia de salida
aplicamos la ecuación (1) y sustituimos a la entrada los picos de tensión. Con una
tensión de entrada de ±1 V de pico (2 Vpp) sabemos que la tensión en el terminal 5 será
de 10,43 más 1 V, y de 10,43 menos 1 V. Así la tensión en el terminal 5 tomará los
valores 11,43 V y 9,43 V, para los picos de entrada positivo y negativo respectivamente.
para V5 = 11,43 V →
f =
6
2
R0 C 0
V
⋅ 1 − 5
Vcc
2
1,14
11,43
=
10 4 (Ω) ⋅ 47 ⋅10 −9 ( F ) ⋅ 1 − 12 = 0,00564 ≈ 202 ( Hz )
5 Generadores y Sinterizadotes de Señales
para V5 = 9,43 V →
f =
2
R0 C 0
V
⋅ 1 − 5
Vcc
2
5,14
9,43
=
10 4 (Ω) ⋅ 47 ⋅10 −9 ( F ) ⋅ 1 − 12 = 0,00564 ≈ 911 ( Hz )
Se observa que cuando la tensión de entrada va de 10,43 V a 11,43 V, la frecuencia de
salida disminuye de 577 (frecuencia de reposo) a 202 Hz; similarmente, cuando la
tensión de entrada disminuye de 10,43 a 9,43 V, la frecuenta aumenta desde 577 a 911
Hz. Es decir, que 577 es la frecuencia central entre 202 y 911 Hz. Este es un proceso de
modulación en frecuencia FM. Este es el principio operativo de los sensores que
convierten tensión en frecuencia.
Así, el rango de frecuencias del circuito se obtiene a partir del rango de tensiones de
entrada. Tenemos las frecuencias ala y baja, límites del rango y su variación:
fH =
V5( mín)
2 V5( máx )
⋅ 1 −
f
=
⋅ 1−
L
Vcc
R0 C 0
V cc
2
2
− fL =
⋅ V5( máx ) − V5( mín ) =
∆V
Vcc R0 C 0
Vcc R0 C 0
2
R0 C 0
∆f = f H
[
]
La expresión anterior corresponde a la sensibilidad del circuito, que se define como:
S=
∆f
2
=
∆V Vcc R0 C 0
Es de destacar que las cuentas que hemos realizado al explicar el proceso de modulación
en frecuencia se verifican, si la impedancia vistas por la fuente de entrada de tensión (Vi)
es infinita. Esta aproximación se basa en el dibujo de la figura 5.
Vi
V5
Zi
10,43 V
Z’
Fig. 5. Circuito equivalente que se
presenta en la entrada del VCO.
En efecto, según la figura 5 se tiene:
V5 = (Vi + 10,43)×
Z'
≈
Zi + Z'
{Z ' → ∞}
≈ Vi + 10,43
7
Instrumentación Electrónica. Juan José González de la Rosa
6 El lazo de enganche de fase (PLL)
6.1 Concepto y definiciones
El de bucle de captura de fase (PLL; Phase Locked Loop; lazo de enganche de fase) es
un circuito con realimentación negativa cuyo objetivo principal consiste en generar una
señal de amplitud fija y frecuencia coincidente con la de entrada, dentro de un margen
determinado.
Cuando el PLL está fuera de sintonía, la salida adopta la frecuencia de oscilación libre
o pulsación central (wFR). El margen de enganche, ∆wL, es la banda de frecuencias entre
las que el PLL se mantiene en sintonía. En esta banda, las pulsaciones de entrada y
salida coinciden. Estando fuera de sintonía el circuito oscila a la pulsación central, y
puede sintonizar las frecuencias de entrada comprendidas en una estrecha franja
denominada margen de captura, ∆wC, y contenida en el margen de enganche. La
frecuencia de oscilación libre se sitúa en el centro geométrico de estos márgenes. La
figura 6 muestra esta distribución espectral.
wLI
wCI
wFR
wCS
wLS
wi
∆ wC
∆ wL
Fig. 6. Distribución espectral de las frecuencias
características de un PLL: Frecuencia central
(wFR), frecuencia de captura superior (wCS) e
inferior (wCI), y frecuencia de enganche superior
(wLS) e inferior (wLI).
6.2 Componentes y funcionamiento de un PLL
La figura 7 muestra el diagrama de bloques de un circuito PLL. En él se aprecia el
detector de fase (PD), cuya salida depende del valor absoluto del desfase entre las
señales de salida vo(t) y la de entrada vi(t).
vi
(wi, θi)
vo
PD, K
V/rad
vd
F(s)
A
vf
VCO, KO rad/seg/V
(wo, θo)
Fig. 7. Diagrama de bloques de un PLL. Se muestran las
señales (variables) de entrada y salida del circuito.
Si se utiliza un comparador de fase de tipo multiplicador (de constante K):
v d = K ⋅ (v1 × v 2 ) = K ⋅ [V1 sen(w1t + θ1 )× V 2 sen(w2 t + θ 2 )]
=
8
K ⋅ V1V 2
⋅ [cos((w1 − w2 )t + θ1 − θ 2 ) − cos((w1 + w2 )t + θ1 + θ 2 )]
2
(2)
5 Generadores y Sinterizadotes de Señales
Como se observa, se origina una frecuencia suma y otra frecuencia diferencia. El filtro
paso-bajo [F(s)] transmite sólo la componente de baja frecuencia del detector. Esta señal
casi continua (de baja frecuencia) establece la frecuencia de oscilación de un oscilador
controlado por tensión (VCO), cerrando el lazo de realimentación.
En situación de enganche, la frecuencia de la señal de salida coincide con la de
entrada (pulsaciones 1 y 2 de la ecuación de anterior), y la tensión de salida del filtroamplificador es continua y depende de la diferencia de desfases:
v f = K D ⋅ cos (θ o − θ i )
(3)
donde KD es una constante que depende de la constante del detector de fase K, y de las
amplitudes de entrada y de salida. Se considera la igualdad en la expresión (3)
suponiendo esta señal tenga frecuencia nula (sólo nos quedamos con la componente de
CC).
Ahora se realiza una aproximación de Taylor del coseno de la diferencia de desfases
anterior. Para ello se recuerda el desarrollo redefiendo nuestra variable de trabajo por
comodidad:
x ≡ θo − θi ;
cos(x ) ≅ cos(x 0 ) − sen(x 0 ) ⋅ (x − x 0 ) − cos(x 0 ) ⋅
(x − x 0 )2
2
+ ...
Si se utiliza el desarrollo en torno al punto x0=π/2, se anula el término de segundo orden
y resulta una aproximación lineal:
2
π
θo − θi −
2
π
cos(θ o − θ i ) ≅ 0 − 1 ⋅ θ o − θ i − − 0 ⋅
+ ...
2
2
π π
cos(θ o − θ i ) ≅ − θ o − θ i − = − (θ o − θ i )
2 2
Entonces, la salida del comparador de fases será, considerando la igualdad en la
expresión en lugar de la aproximación:
π
v f = K D ⋅ − (θ o − θ i )
2
con
KD ≡
KV1V 2
2
(4)
El funcionamiento lineal es fundamental para que el PLL opere en situación de
enganche. La frecuencia de salida del VCO se expresa, en situación de sintonía, como
π
wo = w FR + K o × v f = w FR + K o × K D ⋅ − (θ o − θ i )
1424
3 2
K
(5)
V
donde se observa que cuando la tensión de salida del filtro es cero, entonces oscila a la
pulsación de oscilación libre.
9
Instrumentación Electrónica. Juan José González de la Rosa
En estado de sintonía, la tensión de salida del filtro, vf, varía sólo en función de la
diferencia de desfases entre la entrada y la salida. Los límites de la pulsación de salida
vienen impuestos por los valores extremos del cos(θ0-θi).
6.3 Montaje experimental
La figura 8 muestra un montaje experimental con el PLL digital 565.
+7 V
C2
R1
C3
8
vi
10
2
741
+
vf
7
565
3
9
6
1
C1
4
ref
5
vo
-7 V
Fig. 8. Montaje experimental. R1=10 kΩ; C1=0,01 µF,
C2=10 µF, C3=0,1 nF.
La figura 9 muestra las señales de entrada y de salida fuera de sintonía. La frecuencia de
oscilación libre es de 3,2845 kHz y la entrada es de 5 kHz.
Fig. 9. Señales de entrada y de salida de un PLL
fuera de enganche. Entrada de 1Vpp y Vm=0.
10
5 Generadores y Sinterizadotes de Señales
7 Sintetizadores de frecuencia
Este apartado centra su atención en los sintetizadores indirectos de frecuencia.
7.1 Concepto
Un instrumento sintetizador de frecuencias ofrece una frecuencia múltiplo de una
referencia interna, que es la que determina la resolución y exactitud del instrumento;
como por ejemplo un oscilador de cuarzo. En consecuencia, la frecuencia del patrón
debe ser muy estable2.
En principio, la frecuencia de salida puede expresarse mediante una relación de
proporcionalidad simple, siendo el factor de proporcionalidad un número racional:
fo =
A
⋅ f REF
B
(6)
Como la salida deriva de una frecuencia estable, ésta también lo es, y se logra una
frecuencia estable y precisa. Se consigue un amplio margen de variabilidad, desde 10-6
Hz hasta 1012 Hz; la mejor estabilidad puede ser de 10-10 seg./24 horas.
7.2 Tipos
Se clasifican según el método de generación:
• Sintetizadores directos: Realizan operaciones matemáticas sobre la frecuencia de
referencia para obtener la salida. Este procedimiento es caro y sólo se usa en
instrumentos de propósito específico.
• Sintetizadores digitales: En ellos se muestrea la señal deseada, y un CDA y un
filtro obtienen la salida. Se emplea en instrumentos de bajo coste (pequeño
ancho de banda).
• Sintetizadores indirectos: Emplean un PLL para sintonizar un VCO (puede ser
su VCO interno) con una frecuencia deducida de la de referencia. Es el método
más común.
2
Una frecuencia se considera estable cuando apenas varía al cabo del tiempo. Una frecuencia puede ser
estable y poco precisa; en este caso el offset de frecuencia debe eliminarse, ajustándose el oscilador.
11
Instrumentación Electrónica. Juan José González de la Rosa
7.3 Sintetizadores indirectos
La figura 10 muestra el diagrama de un sintetizador de frecuencias en el que se divide la
frecuencia de salida del VCO.
PLL
1
Filtro
PB
Detector
fase
1/10Z
1
Amplifica
-dor
VCO
1/10X
fo
fREF=1
MHz
1
1/10Y
Fig. 10. Diagrama de bloques de un sintetizador de frecuencias. Las flechas acentuadas
indican acceso desde el panel frontal del instrumento.
El PLL recibe como entradas la frecuencia variable (dividida) de un oscilador y la señal
de salida del VCO (interno) realimentada.
Con el fin analizar el circuito se supone la situación de sintonía del PLL, es decir, se
supone que las frecuencias de entrada y de salida coinciden, manteniéndose en
consecuencia un desfase constante entre ambas señales.
f REF
10
Z
=
f VCO
10 Y
(7)
La frecuencia de salida es la del VCO dividida:
fo =
f VCO
10 X
(8)
Combinando las expresiones (7) y (8) se obtiene la frecuencia de salida en función de la
frecuencia de referencia interna:
fo =
f VCO
10 X
=
1
10 X
⋅
10 Y
10 Y
⋅
f
=
⋅ f REF
REF
Z
X +Z
10
14243 10
fVCO
12
(9)
5 Generadores y Sinterizadotes de Señales
Ejemplo 2. Utilizando la ecuación (8) deducir el rango de variación de la frecuencia de salida de un
sintetizador de frecuencias que responde al esquema de la figura 9; siendo sus parámetros: Z=4,
Y[4,5], X[0,7], fREF=1 MHz.
fo =
10Y
10 X + 4
⋅ 1 (MHz )
Los casos extremos se obtienen realizando las combinaciones adecuadas de
exponentes:
f o,máx =
f o,mín =
10 5
10 0+ 4
10 4
10 7 + 4
⋅ 1 (MHz ) = 10 (MHz )
⋅ 1 (MHz ) = 0,1 (Hz )
Por tanto, este sintetizador posee un rango que abarca desde 0,1 (Hz) hasta 10 (MHz).
La expresión (8) indica que la frecuencia de salida del instrumento se obtiene a partir de
múltiplos (factor 10Y) de la frecuencia mínima apreciable, o resolución del sintetizador:
f REF
10 X + Z
Esto significa que el divisor de frecuencias que actúa sobre la salida del VCO aumenta la
resolución de la síntesis. Este bloque permite aumentar la resolución sin disminuir el
ancho de banda del lazo.
Referencias
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
J.T. Humphries, Electrónica Industrial. Dispositivos, Máquinas y Sistemas de
Potencia Industrial. Ed. Paraninfo. Madrid.
N.R. Malik, Electronic Circuit: Analysis, Simulation and Design. Prentice Hall
International Editions, 1995.
T.B. Mills, The Phase Locked Loop as a Communication System Building Block.
Application Note 46. National Semiconductor, 1971.
W.D. Cooper and A.D. Helfrick, Instrumentación electrónica moderna y técnicas
de medición, Prentice-Hall. Hispanoamericana, 1991.
S. Wolf y R.FM. Smith, Guía para Mediciones Electrónicas y Prácticas de
Laboratorio. Edición ampliada y actualizada. Prentice-Hall Hispanoamericana.
México, 1992.
National Semiconductor. LM565/LM565C Data Sheet, 1999.
E. Mandado, P. Mariño y A. Lago, Instrumentación Electrónica. Marcombo.
Boixareu editores, 1995.
R. Pallás, Instrumentación Electrónica Básica, Marcombo, Boixareu editores, 1987.
13