Mejora de la Imagen
Image Enhancement
Ref: Capítulo 3 – Digital Image
Processing – Gonzalez, Woods
Para que?
Mejorar la visualización
Facilitar el procesamiento posterior
Adecuar la imagen para una aplicación
específica
Por que?
Presencia de ruido
Pocos niveles de grises
Iluminación no uniforme
Mejoramiento
Realce de características de la imagen:
bordes
fronteras
contraste
No incrementa la información
Modifica el rango dinámico.
Facilita detección
Orientadas al problema, subjetivas,cualitativas
Operaciones Puntuales
Operación sin memoria que mapea cada
nivel de gris u [0,L] en un nuevo valor de
gris de acuerdo a la transformación
v=f(u)
Operaciones Puntuales
Estiramiento de contraste
Umbral
Clipping
Inversión (negativo)
Compresión de Rango (logarítmico)
Substracción de Imágenes
Bit slicing
Modelado de Histograma
Mejoramiento de contraste por
estiramiento de histograma
vb
va
a
b
L
Umbral(Thresholding)
v
118
U
Nivel
118
128
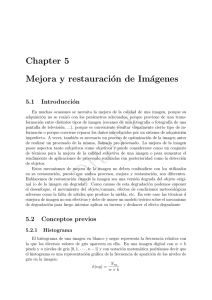
138
Area
19,670 pixels
16,969 pixels
14,462 pixels
Ref: Imagina
128
138
u
Mejoramiento de contraste por
determinación de ventana y nivel
Ref: Osiris, Vismed
Mejoramiento de contraste por
determinación de ventana y nivel
Bit Plane Slicing
Otros métodos
Negativo
Substracción de Imágenes
Modelado de histograma
u
Ecualización de Histograma
u
p u x i
xi 0
v
Cuantización
v*
Uniforme
u
v Fu (u ) pu d
pu(xi)
0
v v min
L 1 0.5
v* Int
1 v min
v tiene distribución uniforme
Ecualización de Histograma
Ecualización de Histograma
Ecualización local
aumenta visualización de detalles
cambia relación entre brillo y estructura.
Modificación de histograma
u
f(u)
v
Cuantización
v*
Uniforme
f(u)=log(1+u) Ej: visualización TF.
f(u)=u1/n
Procesamiento no específico, no óptimo
Mejoramiento de contraste logarítmico
Mejoramiento de contraste exponencial
Falso Color y Pseudocolor
Falso Color : transforma una imagen color en
otra imagen color .
Pseudocolor: mapeo un conjunto de
imágenes en una imagen color.
Ej: Pseudocolor aplicado a una imagen gris
Saturación constante.
Niveles de gris se mapean en el brillo.
Promedios espaciales en hue.
Falso Color y Pseudocolor
Operaciones Espaciales
Involucran una vecindad local del pixel
procesado.
Convolución de la imagen original con un
filtro de respuesta impulsiva finita: “mascara
espacial”.
vm, n
wk , l ym k , n l
k ,l W
Promediado Espacial- Filtrado Pasa bajos
1/9
1
1
1
1
1
1
1
1
1
1/16
1
2
1
2
4
2
1
2
1
aprox. gaussiana
1
vm, n
NW
ym k , n l
k ,lW
Se utiliza :
•suavizado de ruido
•filtrado pasa bajos
•submuestreo de imágenes
Filtrado de Ruido
Hipótesis:
• El tamaño de los pixels es mucho menor
que las estructuras de interés
• El valor de un pixel es parecido al de sus
vecinos.
• Ruido con media nula y varianza 2
1
vm, n
NW
um k , n l m, n
k ,lW
m5
m3
Promedio
reduce ruido
introduce desdibuje de los bordes
desplaza fronteras
reduce contraste
Otros Operadores en el dominio espacial
Filtro de mediana
Filtro modal
Filtro híbrido
Filtro Olímpico
Filtrado no lineal
Filtro de Mediana
20
10
20
x
x
x
15
100
25
x
20
x
20
25
20
x
x
x
[ 10 15 20 20 20 20 20 25 100]
•elimina ruido impulsivo (sal y pimienta), mala performance
gaussiano.
•no corre los bordes, no reduce diferencia de brillo en c/etapa
•elimina líneas de ancho < 1/2vecindad y redondea esquinas
0
0
0
0
1
1
0
1
1
0
0
0
0
1
1
0
1
1
mediana
híbrido
0
0
0
0
0
1
0
1
1
mediana h/v [0 0 111]
mediana ds. [0 0 011]
punto central 1
mediana total [0 1 1]
M7
M3
Filtros de Mediana
M3
3M3
M5
m5
Mediana
Necesita 3(Nw2-1)/8 comparaciones
Existen algoritmos de búsqueda más
eficientes 1/2Nw log2Nw
Mediana móvil : k(Nw+1)
Realce de Bordes
vm, n um, n gm, n
0
g(m,n)= u/ x, u/ y ,
gradiente
aproximaciones del gradiente:
laplaciano
roberts
sobel, etc.
Realce de bordes
-1 -1 -1
-1 +8 -1
-1 -1 -1
Laplaciano
1 11
1 -7 1
1 1 1
0 -1 0
-1 4 -1
0 -1 0
Operadores que implementan el gradiente
Operadores que implementan el gradiente
Operadores que implementan el gradiente
Operadores que implementan el gradiente
Filtrado espacial
Pasa altos
LPF
+
hHP = - hLP
hLP >5x5, 7x7
Pasa banda
LPF1
+
hHP =hLP1- hLP2
hLP1 corta
LPF2
hLP1 larga
Técnicas alternativas de Suavizado
Objetivo: Limpiar ruido de la imagen
reteniendo bordes.
I 0 x, y ux, y x, y
Ruido gaussiano, media nula, independiente
de la imagen, independiente pixel a pixel e
identicamente distribuido.
Difusión Isotrópica
I x, y, t I 0 x, y * Gx, y, t
• I0(x,y): imagen original con ruido
• G(x,y,t): Kernel gaussiano de varianza t
• I(x,y): imagen filtrada.
Interpretación:
Al variar t, la imagen de salida es la observación
de la imagen original a una resolución dada.
Difusión Isotrópica
Espacio de Escalas
Procesar la imagen con un banco de filtros
con t creciente.
Al aumentar t : suavizo más, difundo detalles,
imagen a escala más gruesa.
Köenderink y Witkin
Espacio de Escalas
Detector de borde aplicado
sobre imagen con distintos
grados de difusión
isotrópica
Ecuación del calor
I x, y, t I 0 x, y * Gx, y, t
Interpretación: I(x,y,t) es una familia
paramétrica que se puede obtener como
la solución de aplicar la ecuación del calor
a la imagen.
I t x, y, t I x, y, t I xx I yy
2
I ( x, y , O ) I 0 ( x, y )
Ecuación del calor
Permite resolver el problema de suavizado
gaussiano con herramientas conocidas para
la resolución de ecuaciones en derivadas
parciales.
Nuevo enfoque para la eliminación de ruido:
Encontrar nuevas ecuaciones del calor con
coeficiente de conducción variable.
Difusión anisotrópica
Objetivo:
mejorar la imagen sin destruir bordes
suavizar dentro de las regiones limitadas por
los bordes pero no a través de ellos.
Ecuación de difusión anisotrópica:
I t x, y, t c( x, y, t )I x, y, t
I t x, y, t c( x, y, t ) 2 I x, y, t cx, y, t I x, y, t
c(x,y,t) = cte, difusión isotrópica
Difusión anisotrópica
I t x, y, t c( x, y, t )I x, y, t
Objetivo: Comportamiento distinto si estoy
en una región uniforme o en un borde:
c= 1 dentro de la región
c=0 en los bordes
Estimación de bordes
Problema: No conozco la posición de los
bordes a cada escala. Necesito estimar.
Necesito un descriptor de la presencia de un
borde.
Elección razonable: modulo del gradiente
c( x, y, t ) g I x, y, t
Elección del coeficiente
c( x, y, t ) g I x, y, t
g ( s) 0
s
g ( s) 1
s0
Detectores de bordes
g I e
I
Detector de Leclerc:
Privilegia bordes con alto contraste frente a los de
pequeño
g I
2
k2
1
Detector Lorentziano
Privilegia grandes regiones sobre las pequeñas
I
1 2
k
2
Detectores de bordes
Ecuación de Perona -Malik
I
g ( I )I
t
Si queremos suavizar ruido de una imagen
necesitamos estimar la condición de
parada de la ecuación. Elegir el t de forma
que sea suficiente para eliminar ruido pero
que no deteriore bordes.
Existen criterios que permiten estimar la
condición de parada.
Discretización para la ecuación de
difusión anisotrópica
I
t 1
ij
I cN DN I cS DS I cE DE I cO DO I
t
ij
DN I ij I i 1, j I i , j
cNij g DN I ijt
t
ij
Aplicación: Mejoramiento para el
Diagnóstico
Proyecto Detección de Focos Epileptógenos
Centro de Medicina Nuclear, Hospital de Clínicas- Grupo
de Imágenes Dpto Procesamiento de Señales – IIE,
FING UdelaR
Tesis de Maestría de Cecilia Aguerrebere – Marzo 2011
Estudio del proceso de formación y caracterización
estadística de las imágenes de SPECT.
Aplicación a la remoción de ruido y la
localización de focos epileptógenos.
Detección de focos
Epilepsia: Enfermedad neurológica
con episodios espontáneos y
repetitivos que afectan
severamente la calidad de vida del
paciente. En niños puede tener
consecuencias importantes en el
desarrollo neuronal.
Epilepsia refractaria: no puede ser
controlada por drogas. Requiere
Flujo sanguíneo cerebral
ubicación precisa del foco para
aumenta en la zona del foco
ser operado.
SPECT : Tomografía por Emisión
de Fotón Simple
Imagen funcional
•Muy ruidosa
•Baja resolución (4-6mm).
•Alta variabilidad en imágenes del mismo
paciente
MRI: Resonancia Magnética
Imagen anatómica
Método Clásico: Diferencia
Ictal
Durante la crisis
Inter-ictal
Entre crisis
Imagen Diferencia Focos detectados en
Muchos falsos
SPECT ubicados
positivos
sobre MRI
Método propuesto
Objetivo: Detección sin falsos positivos
Detección de diferencias significativas que no
se deban a ruido o a diferencias normales
por adquirir en distintos tiempos.
Propuesta Tesis Aguerebere: Método Acontrario con modelo de ruido de aquisición
correspondiente a SPECT (Poisson)
Resultados:
Eliminación de ruido
Sin denoising
 0
0