6. REPRESENTACION ESQUEMATICA DE MOVIMIENTOS
Anuncio

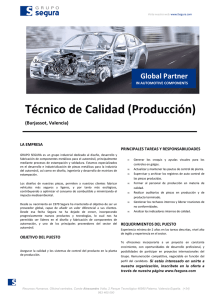
ESQUEMATICADE MOVIMIENTOS 6. REPRESENTACION SECUENCIALES cuandose realiSe dice que una seriede movimientosson secuenciales no comienzahasta movimiento Además, un zan en un orden determinado. y controlado. que el anteriorno se hayarealizado Pararepresentar una secuenciase debenteneren cuentalas normassiguientes: . L o s c i l i n d r o so e l e m e n t o d s e p o t e n c i as e n u m e r a ne n e l o r d e n :1 . 0 ,2 . 0 , 3 . 0 ,e t c . . L o s ó r g a n o sd e g o b i e r n ol l e v a nl a n u m e r a c i ó n1:. 1 , 2 . 1, 3 . 1, 4 . 1 . . . L a primeracifra identificael elementode potenciaque controlany la segunda(el..'1,,) indicaque se tratade un órganode gobierno. . Los captadoresde informaciÓn se numerande la forma: 1.2, 1.4, 2.2, 2 . 4 , . . ,c u a n d o i n f l u y e ne n e l m o v i m i e n t od e s a l i d ad e l v á s t a g oe n l o s c i l i n d r o sy, 1 . 3 ,1 . 5 ,2 . 3 ,2 . 5 , . . .c, u a n d oi n f l u y e ne n e l m o v i m i e n t do e e n tradadel vástago.La primeracifrasiempreindicael elementode potencia al que se refieren.Los captadoresde informaciónse representantal como estánen la posiciónde reposo;por tanto,los que se encuentren activadosse dibujaránfuerade su posiciónde equilibrio. . L o s e l e m e n t o sd e r e g u l a c i ó sne n u m e r a ns e g ú n :1. 0 2 ,1 . 0 3 ,2 . 0 2 ,2 . 0 3 , etc., indicandoel primerdígitoel elementode potenciaal que estánconectados. . L o s e l e m e n t o as u x i l i a r elsl e v a nl a n u m e r a c i ó n0:. 1 , 0 . 2 , 0 . 3e, t c . . El sentidode movimientose indicamedianteel signo<<+>> para la salida ..-,, para y mismo. la entrada del del vástago . Los movimientos se describenen ordencronológico. un procesode estampación Como ejemplode aplicación,consideremos d e p i e z a sc, o n d o s c i l i n d r o sn u m e r a d o s1 . 0 y 2 . 0 .E l c i r c u i t on e u m á t i c od e be operarde la siguienteforma: - Una vez que se hayapulsadoun accionamiento, el vástagodel cilindro 1 . 0d e b ee m p u j a u r n a p i e z a( m o v i m i e n t1o. 0 + ) . - Cuandose alcanceel extremode su recorrido,un final de carreranumeradocomo 2.2 provocaráel movimientosalientedel vástagodel cilindro 2 . 0 ( m o v i m i e n t2o. 0 + ) . - En el momentoen que este vástagollegueal finalde su carrera,el sen1.0-). sor 1.3 marcarála retiradadel vástagodel cilindro1.0 (movimiento - Cuandoel vástagodel cilindroesté totalmenterecogidose activaráel finalde carrera2.3 que producirála retiradadel vástagodel cilindro2.0 (mov i m i e n t o2 . 0 - ) . - Cuandoel vástagodel cilindro2.0 se encuentreen su situacióninicialel sensor1.2 autorizaráel comienzode un nuevociclo. se podríaescribirde la siguienteforma: La secuenciade movimientos - Finad - M o v i m i e n t1 l e carrera2.2 o. 0 + - F i n ad - Movimiento2.0 + l e c a r r e r a1 . 3 - F i n ad - Movimiento'1.0 l e carrera2.3 - F i n ad - M o v i m i e n t 2o . 0 l e c a r r e r a1 . 2 Esta secuenciade movimientosse puede representarde forma gráfica mediantedos tipos de diagramas: - Diagramasde desplazamiento-fase. - Diagramasde desplazamiento-tiempo. ,am 10u HX Proceso de estampación de piezas.