real Valor medido Valor Error − =
Anuncio

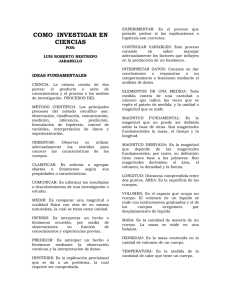
Rango y margen: El rango de un transductor define los límites entre los cuales puede variar la entrada. El margen es el valor máximo de la estrada menos el valor mínimo. Por ejemplo, una celda de carga utilizada para medir fuerzas, podría tener un rango de 0 a 50 kN y un margen de 50 kN. Error: El error es la diferencia entre el resultado de una medición y el valor verdadero de la cantidad que se mide. Error = Valor medido − Valor real Exactitud: La exactitud es el grado hasta el cual un valor producido por un sistema de medición podría estar equivocado. Es por lo tanto, igual a la suma de todos los errores posibles más el error en la exactitud de la calibración del transductor. Por ejemplo, si la exactitud de un instrumento para medir temperatura se especifica como valor de ±2 °C, la lectura en el instrumento estará entre +2 y -2 °C del valor real. Precisión: Es el grado de concordancia dentro de un grupo de mediciones o instrumentos. La diferencia entre exactitud y precisión su muestra de manera clara en la Figura 2.2. Figura 2.2 Exactitud y precisión. Sensibilidad: Es la relación que indica qué tanta salida se obtiene por unidad de entrada, es decir, salida/entrada. Por ejemplo un termómetro de resistencia puede tener una sensibilidad de 0.5 Ω/°C. Error por histéresis: Los transductores pueden producir distintas salidas de la misma magnitud que se mide, si dicha magnitud se obtuvo mediante un incremento o una reducción continuos. A este efecto se le conoce como histéresis. La Figura 2.3 muestra una salida de este tipo, donde el error por histéresis es la diferencia máxima en la salida obtenida a partir de valores de incremento y de decremento. Figura 2.3 Histéresis. Error por linealidad: Para muchos transductores se supone que en su rango de funcionamiento la relación entre la entrada y la salida es lineal, es decir, la gráfica de la salida respecto a la entrada produce una línea recta. Sin embargo, son pocos los transductores en los que la relación anterior es realmente una línea recta; por ello, al suponer la existencia de esta linealidad se producen errores. Repetibilidad / Reproducibilidad: Los términos repetibilidad y reproducibilidad se utilizan para describir la capacidad del transductor para reproducir la misma salida después de aplicar varias veces el mismo valor de entrada. Cuando ya no se logra obtener la misma salida después de aplicar el valor de entrada, el error se expresa como un porcentaje de la salida a rango total. Re petibilidad = val. máx − val. mínimo obtedo × 100 rango total Se dice que un transductor para medir la velocidad angular tiene une repetibilidad de ±0.01% del rango total a una velocidad angular determinada. Banda / tiempo muerto: La banda muerta o espacio muerto de un transductor es el rango de valores de entrada durante los cuales no hay salida. Por ejemplo, en la fricción de rodamiento de un medidor de flujo con rotor significa que no se produce salida hasta que la entrada alcanza cierto umbral de velocidad. El tiempo muerto es el lapso que transcurre desde la aplicación de una entrada hasta que la salida empieza a responder y a cambiar. Resolución: Es el cambio mínimo del valor de la entrada capaz de producir un cambio observable en la salida. Por ejemplo, la resolución de un potenciómetro podría ser 0.05°, o quizás un porcentaje de la desviación a escala total. Para sensores con salida digital, el cambio mínimo de la señal de salida sería de 1 bit. Por lo tanto, un sensor que produzca una palabra de datos de N bits, es decir, un total de 2N bits, la resolución se expresaría como 1/2N. Impedancia de salida: Cuando un sensor que produce una salida eléctrica se vincula con un circuito electrónico, es necesario conocer la impedancia de salida dado que ésta se va a conectar en serie o en paralelo con dicho circuito.