SONAR PARA APLICACIONES TERRESTRES
Anuncio

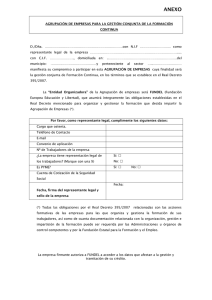
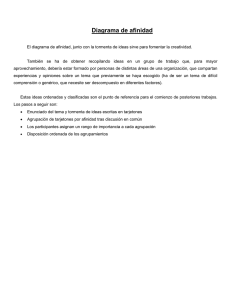
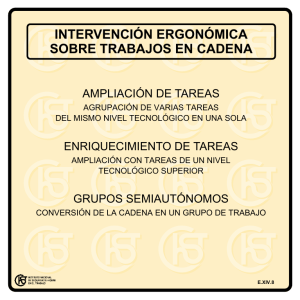
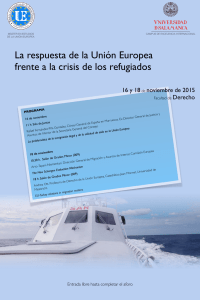
SONAR PARA APLICACIONES TERRESTRES Jordi Gil~ Jordi Per~ Lluis elosas Departament d'Enginyeria Electrónica de la ETSETB (UPC) [email protected],[email protected]. es,jperl201 @alu-etsetb.upc.es INTRODUCCIÓN [1] . El procedimiento que se utiliza para el cálculo de la distancia se basa en la emisión de un pulso, activando simultáneamente un contador de tiempo. El pulso es reflejado en el objeto y detectado en el receptor. En ese instante se detiene el contador y mediante la simple fórmula d=v*t/2 (d: distancia, v: velocidad de propagación, t: tiempo medido por el contador) se determina la distancia al objeto. Convencionalmente se asocia la utilización del sonido como agente de detección en medios acuáticos, debido a su eficiente propagación en estos. Su utilización en medios aéreos (atmósfera) comporta una pérdida importante de esta capacidad de propagación, lo cual ha relegado a este agente a un segundo plano, frente a otros que presentan una propagación más eficiente como las ondas electromagnéticas. El procedimiento utilizado para el pOSIcIOnamiento del objeto (ángulo respecto a la vertical) es más complejo y se basa en la utilización de una agrupación de cápsulas ultrasónicas, realizando sobre ellas una conformación electrónica de haz, de forma que se consigue 'apuntar' el haz principal de la agrupación en todas las direcciones del plano formado por los elementos de ésta. Este trabajo pretende ser una introducción al SONAR con aplicaciones no convencionales, ya que el SONAR se utiliza básicamente en entornos marinos. El motivo que impulsa a la redacción de este artÍCulo es la divulgación de la experiencia realizada por los autores Con estas perspectivas, uno de los pocos huecos que existen para el sonido en la atmósfera es su aplicación al campo de la detección y posicionamiento a corta distancia. Este campo queda vagamente cubierto por las ondas electromagnéticas debido a su gran velocidad de propagación (3*lOe8 mis), la cual impone una imposible capacidad de cálculo con métodos de conteo de tiempo. El sonido, sin embargo, con una velocidad de propagación mucho menor (344 mis), permite una clara aplicación de estos métodos. Existen comercialmente dispositivos, TL851 [2], que permiten la detección y el cálculo de distancia de objetos situados en el margen de 15.24cm a 10.6 m. El objetivo del proyecto ha sido desarrollar un sistema capaz de posicionar un objeto, no solamente en distancia, sino también en dirección con respecto a un origen fijado. Para el desarrollo de este sistema se han aplicado conceptos y técnicas ampliamente utilizadas en el campo de las ondas electromagnéticas (agrupaciones de antenas, diagramas de radiación, conformación de haz, etc.). TEORÍA BÁSICA Fundamentalmente existen dos puntos a tratar para realizar la detección y el posicionamiento de un objeto: el cálculo de la distancia y el cálculo del ángulo donde se encuentra . • RAMAS DE ESTUDIANTES DEL IEEE Una agrupación consiste en diferentes elementos situados a distancias conocidas entre ellos. El hecho que radien sonido provoca fenómenos de interferencia constructiva o destructiva en todo el espacio donde existe radiación de forma que algunos puntos del espacio reciben más potencia que otros. Si se mide la potencia recibida en cada uno de los puntos de una circunferencia trazada en el plano que forman los elementos de la agrupación, centrada ésta y con un radio lo suficientemente alejado de ella (campo lejano) se puede medir el diagrama de radiación, obteniendo máximos en las zonas de interferencia constructiva y ceros en las zonas de interferencia destructiva. Para posicionar precisamente un objeto es necesario que el diagrama de radiación de la agrupación tenga un lóbulo principal con una anchura de haz relativamente pequeña. Para poder detectar objetos en las distintas direcciones la técnica utilizada consiste en modificar a voluntad el diagrama de radiación de la agrupación de forma que el lóbulo utilizado para la detección 'apunte' hacia las diversas direcciones, técnica que se conoce como Conformación de Haz o 'Beamforming' [3]. La conformación del haz se realiza desfasando convenientemente la alimentación de los elementos radiantes consiguiendo así modificar las zonas de interferencia constructiva y destructiva en el espacio con lo que se obtiene un efecto de 'apuntamiento' del haz. Este punto constituye una clave del sistema, ya que la implementación del desfase de las alimentaciones no es sencilla. 55 901 901 18a-+--f----P-+~:.._.+___4_J._____\_____j O 270 Figuro l. Diagrama de radiación de la agrupación en 901 }---'-+-+-+-+-~-+-+-+-+1--i0 270 Figuro 3. Diagrama de radiación de la agrupación recepto- 18u--+--f----P-+~=:-+__4_J.--l_____j O 270 Figuro 2. Diagrama de radiación de la agrupación emÍ.fo901 181}-+--f--+''-t-~+4--+-+--1 O 270 Figuro 4. Diagrama de radiación resultante. ra. AGRUPACIÓN DE CÁPSULAS ULTRASÓNICAS A diferencia de los sistemas que utilizan ondas electromagnéticas, las antenas utilizadas para la emisión de ultrasonidos son distintas a las utilizadas para su recepción, lo cual obliga a la construcción de dos agrupaciones de cápsulas. En la obtención de un diagrama como el descrito en el apartado anterior se ha utilizado una agrupación lineal de tres elementos en ambos casos. La razón de la elección de este número de elementos es la siguiente: existe un compromiso entre la calidad de conformación del haz y la complejidad de control del sistema; con dos elementos la conformación de haz que se puede realizar es muy pobre, mientras que un número superior de elementos introduce un factor de complejidad al sistema que no compensa el escaso beneficio que aporta. La agrupación que mejor se ajusta a nuestras necesidades es una agrupación lineal con los elementos equiespaciados una distancia de 0.5, obteniendo así el diagrama de radiación de la figura 1 (en el caso de que los elementos de la agrupación sean isotrópicos). Dada la frecuencia de trabajo de las cápsulas electrónicas 56 comerciales utilizadas ( f=40 kHz ), una distancia de 0.5 supone una separación entre cápsulas de 43 mm. El diámetro de estas cápsulas es aproximadamente de 1 cm, con lo que la realización física de la agrupación propuesta resulta inviable. Este hecho obliga a distanciar más los elementos lo que provoca la aparición de lóbulos de difracción en el diagrama de radiación, efecto indeseado ya que produce problemas en la decisión de la posición del objeto. Para conseguir un diagrama de radiación parecido al propuesto, se ha optado por aprovechar el hecho de tener dos agrupaciones distintas para emisión y recepción y combinar ambos diagramas de radiación. La meta perseguida es la cancelación de los lóbulos de difracción de cada diagrama con los mínimos del otro diagrama, exceptuando el caso del lóbulo principal, que no debe resultar afectado. Las agrupaciones elegidas presentan los siguientes espaciados: 2 y 2.5 para emisión y 3.1 equiespaciada para recepción. Las figuras 2 y 3 muestran los diagramas obtenidos para las agrupaciones emisora y receptora respectivamente (suponiendo elementos isotrópicos). En ellas se puede observar claramente la presencia de los lóbulos de difracción. La figura 4 muestra como con la combi nación de ambos diagramas se co nsigue disminuir considerab lemente la pre enc ia de estos lób ul o. Queremos destacar que no nos hemos pl anteado en nu estro estudi o la búsqueda de la comb in ación óptim a. Leo SISTEMA DE CONTROL El sistema encargado de ge ·tionar las distintas agrupaciones tiene que ser capaz de realizar una seri e de funciones que permitan la consec ución de la prestac iones esperadas. Para el sistema de alimentación hay que resolver dos cues ti ones fundamentales: la generac ión de las seña les de alimentación de las cápsulas y el desfase de éstas para conseguir la conform ac ión del haz. Las cáp~u l as ti enen un ancho de banda mu y estrecho (aprox im adamente I kHz)[4], lo cual obli ga a que la señal de alimen tación tenga una frecue ncia prácticamente coincidente con su frec uencia nominal (fnom=40 kH z), cosa que es relativamente senci ll a de co nseguir con una generac ión digital de la se ñal. Las tres señales de alimentac ión, además, deben de ser desfasadas de forma muy precisa para obtener la conform ac ión de haz deseada. Para el sistema de recepci ón, el probl ema a reso lver es bás icamente la alineación de las tres señales rec ibidas por la agrupació n para co nseguir la co nformación del haz deseada . La comp lej idad de introdu cir un desfase variabl e de forma analógica hace que esta opci ón sea de difícil rea lización . Por tanto, la posibi lidad de desfasar las seña les de forma digital aparece como la más fact ible. Para el caso de las se ñales de emisión, el de fase se co nsigue retardando el in stante de inicio de generac ión de cada una de ell as . Para el caso de recepc ión, puesto qu e las señales son analóg icas y se realiza un a convers ión A/D , se ap rovecha el muestreo para introducir el desfase retardando el in stan te de ini cio del mi smo. de form a simil ar a lo rea lizado en emi sión. Como resultado se obtienen las señales di gitales desfasadas a vo luntad , res ultando muy senci ll o co mbinarl as para conseguir el di ag rama de rad iac ión deseado. Un esq uema ge neral del prototipo que se ha diseñado se puede observar en la fi gura S. En él se pueden distinguir dos partes bien diferenciadas, la generac ión de las seña le. de alimentac ión. y la rece pción de las muestras de las señales detec tadas y su posteri or proceso para la determinaci ón del bl anco . En efecto para la ge nerac ión de las se ñal es se ha empleado uno de los mi croprocesadores 87CS I [S] Y la PLD EPMS 128 [6] . Para la parte de recepción de muest ras se he empleado una PLD EP 18 1O[6] Y otro microprocesador 87CS I [S]. . . RAMAS DE ESTUDIA TES DEL IEEE Puerto ComunicaCIones - 87c51 87c51 EPM5128 EP1810 Control ¡ f , ~ ,.-.. ~ t ~ /' .. /' '- // // // // // '-- Agrupación Emisora // Agru paclon Receptora Figura 5. Erq//ema del plV/ {J/IiJO SONAR desarrollado. El prototipo di spone además de un puerto de comuni caciones que permite su interconexión con otros sistemas. CONCLUSIONES El prototipo di señado muestra una cl ara apli cación co merc ial en el campo de Sistemas de Segurid ad y Vi gil ancia, dado que el sistema es ca paz de di scriminar la ubi cación de un objeto dentro de una sa la puede decidir si éste se enc uen tra en una zona permitida o prohibida, en función de la di stancia y posici ón calcu lados. Medi ante el puerto de comunicaciones el prototipo puede desencadenar la respuesta de otros sistemas (a larma. circuito celTado de televi sión, etc .). Exi ste un a gran vari edad de campos en los qu e puede tener aplicac ión este sistema: desde la domótica hasta la juguetería o ay ud a a invidentes. REFERENCIAS [1 J SONAR para detección y seguimiento de blancos móviles. JORD I GIL!. JORDI PERA. PFC, ETSETB , 1998. [2] Linear Applicati ons. Texas lnstruments. 1996. [3 J LAG UNAS M.A .. «Procesami ento de Arrays». Apuntes de la asignatura ARRA YS ADAPTATIVOS , imparti da en la ETSETB .1997 [4] Cápsulas ultrasónicas: Frec uencia: 40 1kH z Sensibilidad : -68dBIY/bar Tensión máx ima a la entrada: 20 VRm s. [Sl Kit de desarrollo para microprocesador 87CS l . LLUís CLOSAS. E PBL. [6] Si stema de desarrollo con PLD de Altera, MaxPlu . Para más información. contactar con los autores . S7