automatización de un inversor de giro de un motor de corriente
Anuncio

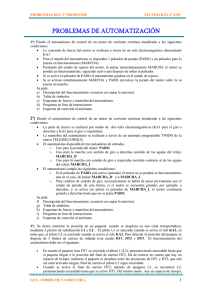
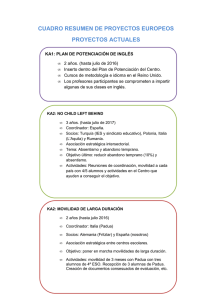
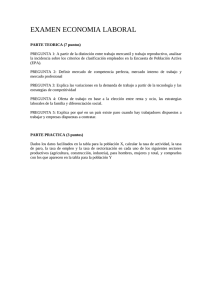
2011 © José Garrigós [AUTOMATIZACIÓN DE UN INVERSOR DE GIRO DE UN MOTOR DE CORRIENTE CONTINUA MEDIANTE AUTÓMATA PROGRAMABLE] AUTOMATIZACIÓN MEDIANTE PLCs TECNOLOGÍA 4º ESO ÍNDICE 1. DESCRIPCIÓN DEL FUNCIONAMIENTO. ......................................................................3 2. ESQUEMAS DE CONEXIÓN Y TABLA DE SIMBOLOS. ................................................3 2.1. ESQUEMA DE FUERZA DEL AUTOMATÍSMO. .................................................................................. 3 2.2. TABLA DE SÍMBOLOS. ...................................................................................................................... 3 2.3. ESQUEMA DE MANIOBRA DEL AUTOMATISMO .............................................................................. 4 3. PROGRAMA EN LISTA DE INSTRUCCIONES ...............................................................4 4. CONEXION DEL AUTÓMATA. ..........................................................................................4 I.E.S. ANDRÉS DE VANDELVIRA 2 DEPARTAMENTO DE TECNOLOGÍA AUTOMATIZACIÓN MEDIANTE PLCs TECNOLOGÍA 4º ESO 1. DESCRIPCIÓN DEL FUNCIONAMIENTO. El presente automatismo permite controlar el sentido de giro de un motor de corriente continua, atendiendo a las siguientes particularidades: • La parte de fuerza se realizará por medio de dos relés electromagnéticos (KA1 para el giro a derechas y KA2 para el giro a izquierdas). La conexión es la que se indica en el esquema eléctrico correspondiente. • La maniobra del automatismo se realizará a través de un autómata programable TWIDO de la marca TELEMECANIQUE, modelo TWDLCAA10DRF. • El automatismo dispondrá de tres pulsadores de entradas: o Uno para la parada del motor: PARO. o Uno para la marcha con sentido de giro a derechas (sentido de las agujas del reloj): MARCHA_D o Uno para la marcha con sentido de giro a izquierdas (sentido contrario al de las agujas del reloj): MARCHA_I • El automatismo cumple las siguientes condiciones: o Si el pulsador de PARO está activo (pulsado) el motor no se pondrá en funcionamiento, aún en el caso, de pulsar MARCHA_D y/o MARCHA_I. o Para cambiar de sentido de giro, necesariamente se habrá de pasar previamente por el estado de parada; de esta forma, si el motor se encuentra girando; por ejemplo, a derechas, y se activa (se pulsa) el pulsador de MARCHA_I, el motor continuará girando a derechas hasta que no se pulse PARO. 2. ESQUEMAS DE CONEXIÓN Y TABLA DE SIMBOLOS. 2.1. ESQUEMA DE FUERZA DEL AUTOMATÍSMO. 11 21 KA1 11 21 14 24 KA2 14 24 M 2.2. TABLA DE SÍMBOLOS. Tabla de símbolos: %I0.0 %I0.1 %I0.2 %Q0.0 %Q0.1 I.E.S. ANDRÉS DE VANDELVIRA PARO MARCHA_D MARCHA_I KA1 KA2 3 DEPARTAMENTO DE TECNOLOGÍA AUTOMATIZACIÓN MEDIANTE PLCs TECNOLOGÍA 4º ESO 2.3. ESQUEMA DE MANIOBRA DEL AUTOMATISMO PARO MARCHA_D KA2 KA1 KA1 KA2 KA1 MARCHA_I KA2 3. PROGRAMA EN LISTA DE INSTRUCCIONES LDN MPS AND ( OR ) ANDN ST MPP AND ( OR ) ANDN ST PARO (* Introducción del resultado lógico –RLO- o en el Stack *) MARCHA_D KA1 KA2 KA1 (* Lectura del RLO de la pila –Stack- *) MARCHA_I KA2 KA1 KA2 + A1 A1 A2 A2 %I0.0 PARO Ry OUT %I0.1 COM 1 %Q0.3 MARCHA_D %I0.2 %I0.3 %Q0.1 N KA2 F %Q0.0 Alimentación 110 240V CA KA1 Ry OUT %I0.4 COM 0 0V DC OUT %I0.5 +24V DC IN COM PLC TWIDO TWDLC AA10DRF %Q0.2 MARCHA_I 4. CONEXION DEL AUTÓMATA. 24 V - I.E.S. ANDRÉS DE VANDELVIRA 4 DEPARTAMENTO DE TECNOLOGÍA