MÉTODOS DE INTEGRACIÓN TABLA DE INTEGRALES
Anuncio

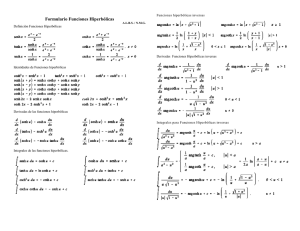
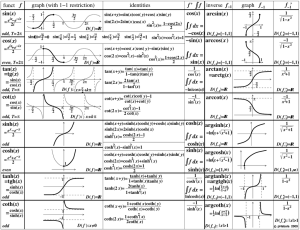
MÉTODOS DE INTEGRACIÓN TABLA DE INTEGRALES INMEDIATAS / COMPOSICIÓN DE FUNCIONES Z xp+1 x dx = +C p+1 Z 1 dx = ln |x| + C x Z p p 6= 1 Z Z ax a dx = +C ln(a) Z au(x) u0 (x) dx = Z Z Z cos(u(x))u0 (x) dx = sen(u(x)) + C cos(x) dx = sen(x) + C Z Z senh(u(x))u0 (x) dx = cosh(u(x)) + C senh(x) dx = cosh(x) + C Z Z cosh(u(x))u0 (x) dx = senh(u(x)) + C cosh(x) dx = senh(x) + C Z Z Z Z Z Z Z Z Si |x| < 1 Z Si |x| > 1 au(x) +C ln(a) sen(u(x))u0 (x) dx = − cos(u(x)) + C sen(x) dx = − cos(x) + C Z u0 (x) dx = ln |u(x)| + C u(x) eu(x) u0 (x) dx = eu(x) + C x Z 0 Z ex dx = ex + C Z up+1 (x) u (x)u (x) dx = +C p+1 p 1 dx = tan(x) + C cos2 (x) Z −1 dx = cot(x) + C sen2 (x) Z 1 dx = tanh(x) + C cosh2 (x) Z 1 √ dx = arc sen(x) + C 1 − x2 −1 √ dx = arc cos(x) + C 1 − x2 1 dx = arctan(x) + C 1 + x2 1 √ dx = argsenh(x) + C 2 x +1 1 √ dx = argcosh(x) + C 2 x −1 1 dx = argtanh(x) + C 1 − x2 Z 1 dx = argcotanh(x) + C 1 − x2 Z 1 cos2 (u(x)) −1 sen2 (u(x)) u0 (x) dx = tan(u(x)) + C u0 (x) dx = cot(u(x)) + C 1 u0 (x) dx = tanh(u(x)) + C cosh (u(x)) 2 q Z 1 u2 (x) 1− −1 q u2 (x) u0 (x) dx = arc sen(u(x)) + C u0 (x) dx = arc cos(u(x)) + C 1− 1 u0 (x) dx = arctan(u(x)) + C 1 + u2 (x) Z 1 q u0 (x) dx = argsenh(u(x)) + C u2 (x) + 1 Z 1 q u0 (x) dx = argcosh(u(x)) + C 2 u (x) − 1 Z 1 u0 (x) dx = argtanh(u(x)) + C 1 − u2 (x) Z 1 u0 (x) dx = argcotanh(u(x)) + C 1 − u2 (x) CAMBIO DE VARIABLE Z f (x) dx = Z f (g(t))g 0(t) dt INTEGRACIÓN POR PARTES Z Z u dv = uv − v du INTEGRACIÓN DE FUNCIONES TRIGONOMÉTRICAS E HIPERBÓLICAS En la mayoría de estas integrales deben tenerse en cuenta las distintas relaciones trigonométricas e hiperbólicas. Las principales son: 1 − cos(2x) 2 cosh(2x) − 1 senh2 (x) = 2 2 2 sen (x) + cos (x) = 1 sen2 (x) = 1 + cos(2x) 2 cosh(2x) + 1 cosh2 (x) = 2 2 2 cosh (x) − senh (x) = 1. cos2 (x) = INTEGRACIÓN DE FUNCIONES IRRACIONALES Z ◦ ◦ ◦ Z Z R(x, √ a2 − x2) dx =⇒ x = a sen(t) −→ dx = a cos(t) dt √ R(x, a2 + x2) dx =⇒ x = a senh(t) −→ dx = a cosh(t) dt √ R(x, x2 − a2) dx =⇒ x = a cosh(t) −→ dx = a senh(t) dt