Análisis Funcional. Tema 5: Topologías débiles
Anuncio

5
Topologías débiles
Índice
1.
Definiciones y primeras propiedades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1.
2
Topologías débiles y sucesiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11
Teoremas de Goldstine y Banach-Alaoglu. Consecuencias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
18
2.1.
Metrizabilidad de las topologías débiles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
20
Puntos extremos. Teorema de Krein-Milman . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
23
3.1.
Una aplicación: Principio del máximo de Bauer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
31
3.2.
Una aplicación: Teorema clásico de Banach-Stone . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
32
Glosario . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
35
2.
3.
Pretendemos en este capítulo introducir la teoría de dualidad en espacios normados, que puede ser considerada como una prolongación del
Teorema de Hahn-Banach. Comenzamos definiendo la topología débil de un espacio normado y la topología débil-* de su dual, estudiando
las analogías y diferencias existentes entre estas topologías y la de la norma. La motivación para dicho estudio es la carencia de subconjuntos
compactos para la topología de la norma.
En la primera sección presentamos resultados básicos sobre topologías débiles, incluyendo el Teorema de Mazur sobre la equivalencia
entre el cierre débil y el cierre en norma para conjuntos convexos, el Teorema de Dixmier que caracteriza cuándo un espacio de Banach es
A
Miguel Martín Suárez
ρ
B
×
5. Topologías débiles
2
dual y, finalmente, el Lema de Schur sobre `1 .
Continuamos con los teoremas de Goldstine y Banach-Alaoglu, verdaderas estrellas de este capítulo. Como consecuencia se obtienen los
teoremas de Dieudonné y Banach-Mazur.
Acabamos el capítulo hablando de puntos extremos y demostrando los teoremas de Krein-Milman y Krein-Milman revertido, de los que
obtenemos el Principio de optimización de Bauer, el Teorema clásico de Banach-Stone y la compactación de Stone-Cech.
1.
Definiciones y primeras propiedades
1.1 Definición.
Sea X un espacio normado. La topología débil de X, denotada por σ(X, X ∗ ), ω(X) o simplemente ω, es la topología inicial en X para los
elementos de X ∗ , esto es, la mínima topología en X (la que tiene menos abiertos) que hace continuos a los elementos de X ∗ .
Análogamente, la topología débil-* de X ∗ , denotada por σ(X ∗ , X) o ω∗ , es la topología inicial en X ∗ para los elementos de X, es decir, la
menor topología en X ∗ que hace continuos a los elementos de X.
Describimos a continuación las principales propiedades de estas topologías, que se deducen de forma inmediata de la definición.
1.2 Proposición.
Sea X un espacio normado. Entonces:
(a) Para cualquier x0 ∈ X, los conjuntos de la forma
{x ∈ X : | fi (x − x0 )| < ε, 1 6 i 6 n} = x0 + {x ∈ X : | fi (x)| < ε, 1 6 i 6 n}
forman una base de entornos de x0 para la topología ω en X, donde ε > 0, n ∈ N, f1 , . . . , fn ∈ X ∗ .
(b) Para cualquier x0∗ ∈ X ∗ , los conjuntos de la forma
∗
x ∈ X ∗ : [x∗ − x0∗ ](xi ) < ε, 1 6 i 6 n = x0∗ + {x∗ ∈ X ∗ : |x∗ (xi )| < ε, 1 6 i 6 n}
forman una base de entornos de x0∗ para la topología débil-* en X ∗ , donde ε > 0, n ∈ N y x1 , . . . , xn ∈ X.
(c) Los semiespacios abiertos {x ∈ X : Re f (x) < α}, donde α ∈ R y f ∈ X ∗ , forman una subbase de abiertos para la topología débil del
espacio normado X. Análogamente, los semiespacios abiertos de la forma {x∗ ∈ X ∗ : Re x∗ (x) < α}, donde α ∈ R y x ∈ X, forman
una subbase de abiertos para la topología débil-* de X ∗ .
A
Miguel Martín Suárez
ρ
B
×
5. Topologías débiles
3
(d) Las topologías σ(X, X ∗ ) en X y σ(X ∗ , X) en X ∗ son de Hausdorff y hacen continuas a las aplicaciones suma y producto por escalares.
Como consecuencia de la continuidad de la suma y el producto por escalares, se tiene que el cierre (en cualquiera de las topologías débil
o débil-*) de un subespacio es subespacio: la aplicación f : K × X × X −→ X dada por f (λ, x, y) = λx + y es continua, luego si Y es un
subespacio,
f K ×Y ×Y ⊆ f (K ×Y ×Y ) = Y ,
lo que implica que Y es un subespacio. Análogamente se prueba que el cierre de un subconjunto convexo es convexo.
Necesitamos para lo que sigue un resultado de álgebra lineal, que se usará bastantes veces a lo largo del tema.
1.3 Lema.
Supongamos que f y f1 , . . . , fn son funcionales lineales sobre el mismo espacio vectorial X. Entonces son equivalentes:
(i) f ∈ lin{ f1 , . . . , fn }.
(ii) Existe C > 0 tal que | f (x)| 6 C máx | fi (x)| para todo x ∈ X.
16i6n
(iii) f está acotado en
(iv)
Tn
k=1 ker f k
Tn
k=1 ker f k .
⊆ ker f .
Demostración. (i) ⇒ (ii) ⇒ (iii) son evidentes. (iii) ⇒ (iv). Como Y = nk=1 ker fk es un subespacio, de estar f acotado en Y se sigue
T
fácilmente que f es cero en Y . (iv) ⇒ (i). Notemos A = nk=1 ker fk y supongamos que A ⊆ ker f . Definimos la aplicación lineal T : X −→ Kn
mediante
T (x) = f1 (x), f2 (x), . . . , fn (x)
(x ∈ X).
T
Como A ⊆ ker f , la aplicación lineal S0 : T (X) −→ K dada por
S0 ( f1 (x), f2 (x), . . . , fn (x)) = f (x)
(x ∈ X)
está bien definida. Si S es una extensión lineal de S0 a Kn , entonces existen β1 , β2 , . . . , βn ∈ K tales que
n
S(α1 , . . . , αn ) =
∑ βk αk
k=1
(α1 , . . . , αn ) ∈ Kn .
A
Miguel Martín Suárez
ρ
B
×
5. Topologías débiles
4
n
Como S ◦ T = f , deducimos que f =
∑ βk fk . La implicación contraria es inmediata.
k=1
Nos preguntamos ahora cuál es la relación entre las tres topologías que tenemos entre manos: débil y norma en un espacio normado X y
débil, débil-* y norma en X ∗ .
• Ya que la topología de la norma en un espacio normado X hace continuos a los elementos de X ∗ , será mayor que la topología débil.
• Esta inclusión es estricta si X es de dimensión infinita, debido a que cualquier entorno de cero en la topología débil contiene un
T
subespacio vectorial de codimensión finita de la forma ni=1 ker fi para convenientes f1 , . . . , fn ∈ X ∗ , que no es cero y, por tanto, no
está acotado.
• En un espacio de dimensión finita, ambas topologías coinciden. En efecto, tenemos que comprobar que todo subconjunto abierto para
la topología de la norma es ω-abierto y, gracias a la continuidad de la suma y el producto por escalares en ambas topologías, basta
comprobar que BX es ω-entorno de cero; tomando una base {e∗1 , . . . , e∗n } de X ∗ , definimos una norma en X por
|||x||| = máx |e∗i (x)|
16i6n
(x ∈ X),
que será equivalente a la de partida, lo que nos proporciona un positivo δ > 0 tal que
δkxk 6 |||x|||
con lo que el conjunto ω-abierto
(x ∈ X)
{x ∈ X : |e∗i (x)| 6 δ, i = 1, . . . , n}
está contenido en BX .
• Análogamente, en el dual de un espacio normado X la topología débil-* es menor que la de la norma; dicha inclusión es estricta si el
espacio es de dimensión infinita y ambas son iguales cuando la dimensión es finita.
• Por otra parte, la topología débil-∗ es también más pequeña que la topología débil, y la igualdad σ(X ∗ , X) = σ(X ∗ , X ∗∗ ) equivale a la
reflexividad de X. En efecto, si x∗∗ ∈ X ∗∗ = L(X ∗ , K) es débil-* continuo, entonces podemos encontrar δ > 0 y x1 , . . . , xn ∈ X tales que
{x∗ ∈ X ∗ : |x∗ (xi )| < δ, i = 1, . . . , n} ⊆ {x∗ ∈ X ∗ : |x∗∗ (x∗ )| < 1}.
Se sigue del Lema 1.3 que x∗∗ ∈ lin{x1 , . . . , xn } ⊂ JX (X). La implicación contraria es inmediata.
A
Miguel Martín Suárez
ρ
B
×
5. Topologías débiles
5
• Análogamente a la demostración anterior, se demuestra que si f ∈ X ] es ω-continuo, entonces f es norma-continuo, esto es, f ∈ X ∗ .
• Por último, si consideramos a un espacio normado X como subespacio de su bidual, vía la inyección canónica, entonces la restricción
de la topología débil-* de X ∗∗ al espacio X = JX (X) coincide con la topología débil de X.
• También es fácil comprobar, gracias al Teorema de Hahn-Banach, que si Y es un subespacio de X, entonces la topología débil de Y
coincide con la restricción a Y de la topología débil de X.
Agrupamos todos los comentarios anteriores en el siguiente resultado:
1.4 Proposición.
Sea X un espacio normado. Entonces se verifican las siguientes propiedades:
(a) La topología ω es menor que la topología de la norma de X. En X ∗ , la topología ω∗ es menor que la topología ω.
(b) Si X tiene dimensión infinita, los abiertos débiles de X y los abiertos débiles-* de X ∗ contienen subespacios no nulos y, por tanto, no
están acotados.
(c) Si x∗∗ ∈ X ∗∗ es ω∗ -continuo, entonces existe x ∈ X tal que x∗∗ = JX (x).
(d) Si f ∈ X ] es ω-continuo, entonces f ∈ X ∗ .
(e) La topología débil y la de la norma (resp. la débil-* y la de la norma del dual) coinciden si, y sólo si, la dimensión de X es finita.
(f) Las topologías débil y débil-* en X ∗ coinciden si, y sólo si, X es reflexivo.
(g) La topología inducida en X por la topología ω∗ de X ∗∗ coincide con la topología ω de X, esto es, σ(X ∗∗ , X ∗ )|X = σ(X, X ∗ ).
(h) Si Y es un subespacio de X, entonces la topología débil de Y coincide con la restricción a Y de la topología débil de X, esto es,
σ(Y,Y ∗ ) = σ(X, X ∗ )|Y .
El siguiente resultado ahonda en la idea de que las topologías débil y débil-* son muy diferentes de la topología de la norma en dimensión
ω
infinita. Necesitamos introducir notación: si X es un espacio normado, escribiremos A para denotar el cierre en la topología débil del
∗
ω
conjunto A ⊂ X y B para el cierre en la topología ω∗ del conjunto B ⊂ X ∗ .
1.5 Proposición.
Sea X un espacio normado de dimensión infinita. Entonces
SX
ω
= BX
y
(x ∈ X)
y
En consecuencia, las aplicaciones
x 7−→ kxk
SX ∗
ω∗
= BX ∗ .
x∗ 7−→ kx∗ k
(x∗ ∈ X ∗ )
A
Miguel Martín Suárez
ρ
B
×
5. Topologías débiles
6
son inferiormente semicontinuas para las topologías débil y débil-*, respectivamente, pero no son continuas.
ω
Demostración. Demostraremos que SX = BX ; el otro caso es completamente análogo. Como
BX =
\
x∗ ∈BX ∗
{x ∈ X : Re x∗ (x) 6 1},
ω
/
se tiene que BX es ω-cerrado y, por tanto, SX ⊆ BX . Para la otra inclusión, fijemos x0 ∈ BX y U un ω-entorno de x0 y veamos que U ∩ SX 6= 0.
Podemos suponer que U es un ω-entorno básico, esto es,
U = {x ∈ X : |xi∗ (x) − xi∗ (x0 )| < ε, i = 1, . . . , n},
donde ε > 0, x1∗ , . . . , xn∗ ∈ X ∗ . Como la dimensión de X es infinita, podemos encontrar un elemento x ∈ X con kxk = 1 y tal que xi∗ (x) = 0
para i = 1, . . . , n. Basta entonces observar que x0 + t x ∈ U para todo t ∈ R, que la aplicación
Φ(t) = kx0 + t xk
(t ∈ R)
es continua, que
Φ(0) 6 1,
lı́m Φ(t) = +∞
t→+∞
y el Teorema del valor intermedio nos proporciona un t0 ∈ R+ tal que Φ(t0 ) = 1. El resto de la demostración es totalmente rutinario.
En otro orden de cosas, queremos dar versiones de los teoremas de separación para las topologías débil y débil-*. El primer caso es
totalmente evidente; el segundo necesita un pequeño truco.
1.6 Teorema (de separación de convexos para la topología débil).
Sea X un espacio normado. Si A es un subconjunto convexo y débil cerrado de X y x0 ∈
/ A, existe f ∈ X ∗ tal que
Re f (x0 ) > sup Re f (a).
a∈A
1.7 Teorema (de separación de convexos para la topología débil-*).
Sea X un espacio de Banach, A un subconjunto ω∗ -cerrado y convexo de X ∗ y x0∗ ∈ X ∗ \ A. Entonces, existe x ∈ X tal que
Re x0∗ (x) > sup Re a∗ (x).
a∗ ∈A
A
Miguel Martín Suárez
ρ
B
×
5. Topologías débiles
7
/ A, existirá un ω∗ -entorno de cero básico
Demostración. Como A es ω∗ -cerrado y x0∗ ∈
U = {x∗ ∈ X ∗ : |x∗ (xi )| < ε, 1 6 i 6 n}
/ donde ε > 0, n ∈ N, x1 , . . . , xn ∈ X. Por la simetría de U, se tiene que x0∗ ∈
tal que (x0∗ +U) ∩ A = 0,
/ A +U; por ser A +U ω∗ -abierto (luego
∗∗
∗∗
abierto en norma), encontramos x ∈ X tal que
Re x∗∗ (x0∗ ) > sup Re x∗∗ (x∗ ) > sup x∗∗ (x∗ ).
x∗ ∈A+U
Resta probar que x∗∗ = JX (x) para cierto x ∈ X. Como
nos dice que x∗∗ ∈ lin{x1 , . . . , xn } ⊂ X.
x∗ ∈A
Tn
i=1 ker JX (xi ) ⊂ U, se tiene que x
∗∗
está acotado en
Tn
i=1 ker JX (xi ), luego el Lema 1.3
Podemos estudiar ahora la relación entre los conjuntos convexos y cerrados para las topologías de la norma, la débil y la débil-*.
Encontraremos aquí la primera diferencia importante entre las topologías débil y débil-*.
Para la topología débil se tiene la siguiente consecuencia inmediata de los teoremas de separación de conjuntos convexos.
1.8 Teorema (de Mazur, 1932).
Sea X un espacio normado y M un subconjunto convexo de X. Entonces M es cerrado si, y sólo si, M es ω-cerrado. En consecuencia, para
conjuntos convexos, el cierre en norma y el cierre débil coinciden.
Demostración. Si M es ω-cerrado, entonces M es cerrado por la relación entre las topologías. Recíprocamente, si M es un subconjunto
convexo y cerrado de X y x0 ∈
/ M, podemos encontrar un funcional f ∈ X ∗ y α > 0 tal que
Re f (x0 ) > α > Re f (x)
(x ∈ M),
ω
luego el ω-entorno de x0 {x ∈ X : Re f (x) > α} no corta a M y, por tanto, x0 ∈
/M .
ω
Para conjuntos que no sean convexos, el resultado anterior es falso pues, si la dimensión de X es infinita, se tiene SX = BX . Para la
topología débil-*, el Teorema de Mazur no es cierto. Para probar esto, comenzamos completando el estudio de los anuladores que se hizo en
el capítulo 3.
1.9 Proposición.
Sea X un espacio normado y B ⊂ X ∗ . Entonces:
A
Miguel Martín Suárez
ρ
B
×
5. Topologías débiles
8
ω∗
(a) (⊥ B)⊥ = lin(B) . De manera más sugestiva,
lin(B)
ω∗
=
\
ker JX (x).
x∈ ⊥ B
(b) lin(B)
ω∗
= X ∗ si, y sólo si, ⊥ B = {0}, esto es, B separa los puntos de X.
Demostración. (a). Comencemos observando que, para cualquier subconjunto A de X, el subespacio A⊥ de X ∗ es ω∗ -cerrado, pues
A⊥ =
\
x∈A
{x∗ ∈ X ∗ : x∗ (x) = 0}.
ω∗
Entonces, (⊥ B)⊥ es un subespacio ω∗ -cerrado de X ∗ que contiene a B, luego lin(B) ⊆ (⊥ B)⊥ . Recíprocamente, si x∗ ∈ X ∗ \ lin(B)
Teorema 1.7 nos da un elemento no nulo x ∈ X tal que
n
o
ω∗
Re x∗ (x) > sup Re y∗ (x) : y∗ ∈ lin(B)
,
ω∗
lo que claramente implica, por ser lin(B) un subespacio, que y∗ (x) = 0 para todo y∗ ∈ lin(B)
Deducimos que x ∈⊥ B y, por ser x∗ (x) 6= 0, que x∗ ∈
/ (⊥ B)⊥ .
(b). Si ⊥ B = {0}, entonces lin(B)
todo x∗ ∈ lin(B)
ω∗
= X ∗ , luego x = 0.
ω∗
ω∗
ω∗
, el
y, en particular, y∗ (x) = 0 para todo y∗ ∈ B.
=(⊥ B)⊥ = {0}⊥ = X ∗ . Recíprocamente, si x ∈⊥ B, por ω∗ -continuidad se tiene que x∗ (x) = 0 para
Obtenemos una descripción de los subespacios ω∗ -cerrados de un espacio dual.
1.10 Corolario.
Sea X un espacio normado. Para cada A ⊂ X, el subespacio A⊥ de X ∗ es ω∗ -cerrado. Recíprocamente, si N es un subespacio ω∗ -cerrado de
X ∗ , entonces existe un subespacio cerrado Y de X tal que N = Y ⊥ .
Demostración. La primera afirmación ya se ha comentado en la demostración de la proposición anterior. Recíprocamente, N = lin(N)
(⊥ N)⊥ , y basta tomar Y =⊥ N, que es un subespacio cerrado de X.
ω∗
=
Aplicando la proposición anterior al bidual de un espacio normado, obtenemos el siguiente corolario que, en particular, nos dice que la
topología ω∗ y la norma no tienen siempre los mismos conjuntos convexos y cerrados.
A
Miguel Martín Suárez
ρ
B
×
5. Topologías débiles
9
1.11 Corolario.
σ(X ∗∗ ,X ∗ )
Sea X un espacio normado. Entonces JX (X)
= X ∗∗ . De forma más sugerente, X es ω∗ -denso en X ∗∗ .
Caracterizamos ahora cuándo un espacio normado es (isomorfo a) un espacio dual, para lo que usamos una idea debida a Dixmier. La
aplicación traspuesta JX∗ de la inyección canónica de un espacio de normado X en su bidual, es una aplicación lineal del tercer dual X ∗∗∗
sobre el primero X ∗ y tiene una interpretación sencilla: si x∗∗∗ ∈ X ∗∗∗ , JX∗ (x∗∗∗ ) no es otra cosa que la restricción de x∗∗∗ a X cuando vemos a
X como subespacio de X ∗∗ . Es claro que JX∗ es continua para las topologías de la norma en X ∗∗∗ y X ∗ , con kJX∗ k = 1. Si ahora consideramos la
inyección canónica JX ∗ , observamos inmediatamente que JX∗ ◦ JX ∗ es la identidad en X ∗ . Por tanto, componiendo en orden inverso y notando
PX = JX ∗ ◦ JX∗ ,
obtenemos una proyección lineal de X ∗∗∗ en sí mismo; su imagen es JX ∗ (X ∗ ) mientras que su núcleo es JX (X)⊥ , el anulador de X cuando le
vemos como subespacio de X ∗∗ . Así pues, de ser X ∗ un espacio de Banach dual, deducimos que JX ∗ (X ∗ ) es un subespacio complementado
de X ∗∗∗ mediante una proyección de norma uno cuyo núcleo es un subespacio ω∗ -cerrado (esto es, cerrado para la topología σ(X ∗∗∗ , X ∗∗ ))
de X ∗∗∗ .
Recíprocamente, supongamos que Y es un espacio de Banach y que existe una proyección lineal y continua P de Y ∗∗ sobre JY (Y ) tal
que kPk = 1 y ker P es ω∗ -cerrado (σ(Y ∗∗ ,Y ∗ )-cerrado) en Y ∗∗ . Existirá un subespacio cerrado (en norma) X de Y ∗ tal que X ⊥ = ker P
(Corolario 1.10 aplicado a la topología σ(Y ∗∗ ,Y ∗ )); la condición kPk = 1 hace que tengamos un isomorfismo isométrico de Y ∗∗ / ker P
sobre JY (Y ) (comprobación inmediata), pero JY (Y ) es isométricamente isomorfo a Y , mientras que Y ∗∗ /X ⊥ lo es a X ∗ , luego tenemos un
isomorfismo isométrico de Y sobre X ∗ . Hemos probado:
1.12 Teorema (de Dixmier).
Sea X un espacio normado; notando
se obtiene una proyección lineal y continua en X ∗∗∗ tal que
PX = JX ∗ ◦ JX∗ ,
PX (X ∗∗∗ ) = JX ∗ (X ∗ ),
kPX k = 1,
Así pues,
ker PX = JX (X)⊥ .
X ∗∗∗ = JX ∗ (X ∗ ) ⊕ JX (X)⊥
y la suma es topológico-directa. En particular, JX ∗ (X ∗ ) es un subespacio complementado de X ∗∗∗ .
Recíprocamente, si Y es un espacio de Banach y existe una proyección lineal y continua P de Y ∗∗ sobre JY (Y ) tal que kPk = 1 y ker P es
entonces existe un espacio de Banach X tal que Y es isométricamente isomorfo a X ∗ .
ω∗ -cerrado,
A
Miguel Martín Suárez
ρ
B
×
5. Topologías débiles
10
El aspecto más interesante del Teorema de Dixmier es la caracterización de los espacios de Banach duales que proporciona. Si suprimimos
la condición kPk = 1 en dicho teorema, las afirmaciones algebraico-topológicas permanecen; sólo perdemos el hecho de que el isomorfismo
de Y ∗∗ / ker P sobre JY (Y ) sea isométrico. Por tanto, con los mismos argumentos, probamos:
1.13 Corolario.
Si Y es un espacio de Banach, las siguientes afirmaciones son equivalentes:
• Existe una proyección lineal y continua de Y ∗∗ sobre JY (Y ) cuyo núcleo es ω∗ -cerrado.
• Existe un espacio de Banach X tal que Y es isomorfo a X ∗ .
Puesto que c0 no está complementado en `∞ (Teorema de Philips), obtenemos:
1.14 Corolario.
No existe ningún espacio de Banach cuyo dual sea isomorfo a c0 .
Acabamos esta primera sección estudiando la continuidad de los operadores lineales respecto a las topologías débiles. Comenzamos
viendo cuándo un operador lineal es continuo para la topología débil.
1.15 Teorema.
Sean X e Y espacios normados y T : X −→ Y un operador lineal. Entonces T es continuo respecto a las topologías débiles σ(X, X ∗ ) y σ(Y,Y ∗ )
si, y sólo si, T es continuo (para las topologías de la norma de X y de Y ). En particular, T es un isomorfismo si, y sólo si, T : (X, ω) −→ (Y, ω)
es un homeomorfismo.
Demostración. Supongamos primero que T es continuo para las topologías de la norma. Fijamos x0 ∈ X y un ω-entorno de T x0 en Y de la
forma
V = {y ∈ Y : |y∗i (y) − y∗i (T x0 )| < ε, i = 1, . . . , n}
(donde ε > 0, n ∈ N, y∗1 , . . . , y∗n ∈ Y ∗ ) y observamos que
T −1 (V ) = {x ∈ X : |y∗i (T x) − y∗i (T x0 )| < ε, i = 1, . . . , n}
= x ∈ X : [T ∗ (y∗i )](x) − [T ∗ (y∗i )](x0 ) < ε, i = 1, . . . , n .
A
Miguel Martín Suárez
ρ
B
×
5. Topologías débiles
11
Es inmediato ya que T −1 (V ) es un ω-entorno de x0 .
Recíprocamente, supongamos que T es continuo para las topologías débiles y veamos que T (BX ) está acotado. Para ello, gracias al
Teorema de Banach-Steinhaus, basta probar que y∗ (T (BX )) está acotado para cada y∗ ∈ Y ∗ . Por ser T continuo para la topología débil, y∗ ◦ T
es un funcional lineal en X continuo para la topología ω de X y, por tanto, y∗ ◦ T ∈ X ∗ ; esto implica que y∗ (T (BX )) = [y∗ ◦ T ](BX ) está
acotado.
1.1.
Topologías débiles y sucesiones
Tratamos en este apartado algunas cuestiones sobre la convergencia débil y débil-* de sucesiones. El concepto de sucesión convergente
para una topología arbitraria es bien conocido aunque no está de más recordarlo. Por otra parte, sí necesitamos definir los conceptos de
sucesión de Cauchy para las topologías débil y débil-*, pues el concepto de sucesión de Cauchy no se puede definir en espacios topológicos
arbitrarios.
1.16 Definición.
Sea X un espacio normado, (xn ) una sucesión de elementos de X y (xn∗ ) una sucesión de elementos de X ∗ . Decimos que (xn ) es una sucesión
débil-Cauchy si para cada ω-entorno de cero U, existe un natural n tal que x p − xq ∈ U para cualesquiera p, q > n. Si x0 es un elemento de
X, (xn ) converge en la topología débil a x0 si para cada ω-entorno U de x0 , existe un natural n tal que xm ∈ U para todo m > n. En este caso
ω
diremos que (xn ) converge débilmente a x0 y escribiremos (xn ) −→ x0 . Obsérvese que el límite de una sucesión débil convergente es único
por ser (X, ω) un espacio topológico de Hausdorff.
Análogamente, decimos que (xn∗ ) es una sucesión débil-*-Cauchy si para cada ω∗ -entorno de cero V , existe un natural n tal que x∗p −xq∗ ∈ V
para cualesquiera p, q > n. Si x0∗ es un elemento de X ∗ , (xn∗ ) converge en la topología débil-* a x0∗ si para cada ω∗ -entorno V de x0∗ , existe un
ω∗
∗ ∈ V para todo m > n. En este caso diremos que (x∗ ) converge débil-* a x∗ y escribiremos (x∗ ) −→ x∗ . Igual que ocurre
natural n tal que xm
n
n
0
0
con la topología débil, el límite en la topología débil-* es único.
Es claro de la definición que toda sucesión débil convergente es débil-Cauchy y toda sucesión débil-* convergente es débil-*-Cauchy.
También es claro que la convergencia en norma fuerza la convergencia débil y la convergencia débil en un espacio dual fuerza la convergencia
débil-*.
Comentemos que es posible hablar de convergencia o de condición de Cauchy débil o débil-* de sucesiones sin necesidad de introducir las
topologías débiles. Visto de esta forma, el siguiente resultado, que es de demostración elemental, se tomaría como definición de convergencia
y condición de Cauchy para las topologías débil y débil-*.
A
Miguel Martín Suárez
ρ
B
×
5. Topologías débiles
12
1.17 Proposición.
Sea X un espacio normado. Entonces:
(a) Una sucesión (xn ) de elementos de X converge débilmente a x0 ∈ X, si, y sólo si,
lı́m f (xn ) = f (x0 )
n→∞
para todo f ∈ X ∗ . La sucesión (xn ) es débil-Cauchy si, y sólo si, para cada f ∈ X ∗ , la sucesión f (xn ) es de Cauchy en K (equivalentemente, convergente).
(b) Como consecuencia del Teorema de Banach-Steinhaus, toda sucesión débil-Cauchy de X está acotada en norma.
(c) Una sucesión (xn∗ ) en X ∗ converge débil-* a x0∗ ∈ X ∗ , si, y sólo si,
lı́m x∗ (x) = x0∗ (x)
n→∞ n
ω∗
para todo x ∈ X. En este caso diremos que (xn∗ ) converge débil-* a x0∗ y escribiremos (xn∗ ) −→ x0∗ . La sucesión (xn∗ ) es débil-*-Cauchy
si, y sólo si, para cada x ∈ X, la sucesión xn∗ (x) es de Cauchy en K (equivalentemente, convergente).
(d) Si X es completo, también como consecuencia del Teorema de Banach-Steinhaus, toda sucesión débil-*-Cauchy de X ∗ está acotada
en norma.
El siguiente resultado, también de demostración elemental, nos permitirá caracterizar la convergencia débil y débil-* en algunos espacios
concretos.
1.18 Lema.
Sea X un espacio normado, E ⊂ X tal que X = lin(E) y F ⊂ X ∗ tal que X ∗ = lin(F). Entonces:
(a) Una sucesión (xn∗ ) de puntos de X ∗ converge débil-* a x∗ ∈ X (resp. es débil-*-Cauchy) si está acotada en norma y lı́m xn∗ (x) = x∗ (x)
(resp. xn∗ (x) es de Cauchy) para todo x ∈ E.
(b) Una sucesión (xn ) de puntos de X converge débil a x ∈ X (resp. es débil-Cauchy) si (xn ) está acotada en norma y lı́m x∗ (xn ) = x∗ (x)
(resp. x∗ (xn ) es de Cauchy) para todo x∗ ∈ F.
El conjunto {en : n ∈ N} formado por las sucesiones
en (k) = δn, k
(k ∈ N)
genera c00 , que es denso en c0 y en ` p (1 6 p < ∞), con lo que podemos particularizar el lema anterior a los siguientes casos:
A
Miguel Martín Suárez
ρ
B
×
5. Topologías débiles
13
1.19 Proposición.
Con respecto a
(a)
(b)
(c)
(d)
la topología débil σ(c0 , `1 ) de c0 ;
la topología débil σ(` p , `q ) de ` p (p > 1, y 1/p + 1/q = 1);
la topología débil-* σ(`∞ , `1 ) de `∞ ;
la topología débil-* σ(`1 , c0 ) de `1 ;
n→∞
una sucesión (xn ) converge a x (resp. es de Cauchy) si está acotada en norma y xn (k) −→ x(k) (resp. xn (k) n es de Cauchy) para cada
k ∈ N, donde tanto la sucesión (xn ) como x han de estar de partida en el espacio correspondiente.
ω
ω
En espacios de Banach de dimensión infinita, (xn ) −→ x no implica que (xn ) −→ x en norma. Por ejemplo, (en ) −→ 0 en c0 . No obstante,
el siguiente corolario del Teorema de Mazur nos da algo positivo:
1.20 Corolario.
ω
Sea X un espacio normado y (xn ) una sucesión de elementos de X tal que (xn ) −→ x. Entonces, existen combinaciones convexas yn de
los elementos {xn : n ∈ N} tales que (yn ) −→ x en norma. Concretamente, existen una aplicación τ : N −→ N estrictamente creciente, una
τ(n+1)
sucesión de escalares positivos (λn ) con
∑
i=τ(n)+1
λi = 1 para cada n ∈ N, de forma que la sucesión
τ(n+1)
yn =
λi xi
∑
i=τ(n)+1
(n ∈ N)
converge a x en norma.
Demostración. El resultado es consecuencia de que, para cualquier m ∈ N,
x ∈ co {xi : i > m}
ω
k·k
= co {xi : i > m}
,
donde co(A) representa la envolvente convexa de un subconjunto A de X.
Este resultado es falso para la topología débil-*, como muestra el siguiente ejemplo:
A
Miguel Martín Suárez
ρ
B
×
5. Topologías débiles
14
1.21 Ejemplo.
ω∗
Consideremos la sucesión (e∗n ) en `1 = c∗0 . Por una parte, es fácil comprobar que (e∗n ) −→ 0. Por otra parte, cualquier combinación convexa
de elementos de {e∗n : n ∈ N} tendrá norma 1.
Otra diferencia entre los espacios (X, ω) y (X ∗ , ω∗ ) es la complitud secuencial, esto es, el hecho de que las sucesiones de Cauchy sean
convergentes. Para la topología ω∗ , cuando X es un espacio completo y como consecuencia del Teorema de cierre de Steinhaus, la situación
es magnífica.
1.22 Proposición.
El dual de cualquier espacio de Banach es débil-* secuencialmente completo. Esto es, si X es un espacio de Banach y (xn∗ ) es una sucesión
ω∗
débil-*-Cauchy
en X ∗ , entonces existe x∗ ∈ X ∗ tal que (xn∗ ) −→ x∗ . Equivalentemente, sea (xn∗ ) una sucesión en X ∗ tal que, para cada x ∈ X,
∗
xn (x) es de Cauchy (convergente); entonces, definiendo
x∗ (x) = lı́m xn∗ (x)
n→∞
(x ∈ X),
ω∗
se obtiene un elemento de X ∗ y (xn∗ ) −→ x∗ .
Demostración. Recordemos primero que X ∗ = L(X, K); ahora, si (xn∗ ) es una sucesión débil-*-Cauchy, entonces xn∗ (x) es una sucesión
convergente para cada x ∈ X. El Teorema de cierre de Steinhaus nos dice que, definiendo
x∗ (x) = lı́m xn∗ (x)
n→∞
(x ∈ X),
se tiene que x∗ ∈ L(X, K) = X ∗ . Pero la convergencia ω∗ de una sucesión equivale a la convergencia puntual en X (sólo nos faltaba que el
ω∗
límite puntual se quedase en X ∗ ), por lo que (xn∗ ) −→ x∗ .
Un resultado análogo para la topología débil no es cierto, ni siquiera cuando tenemos un espacio completo. Veamos el siguiente ejemplo:
1.23 Ejemplo.
Consideremos en c0 la sucesión (xn ) dada por
n
xn =
∑ en
k=1
(n ∈ N),
A
Miguel Martín Suárez
ρ
B
×
5. Topologías débiles
15
esto es, xn (k) = 1 si k 6 n y xn (k) = 0 si k > n. Es fácil comprobar que (xn ) es una sucesión ω-Cauchy; por otra parte, xn (k) n −→ 1 para
ω∗
todo k ∈ N, luego el único candidato a límite débil de (xn ) es la sucesión constantemente igual a 1, que no está en c0 . De hecho, (xn ) −→ u
en `∞ , donde u es la sucesión constantemente igual a 1.
Por otra parte, en un espacio reflexivo la topología débil coincide con la topología débil-* de su bidual, luego: la topología débil en
cualquier espacio reflexivo es secuencialmente completa.
Una forma de dar ejemplos de espacios no reflexivos para los que se verifique lo anterior es estudiar la llamada Propiedad de Schur.
Conviene introducir la siguiente terminología y algunas propiedades elementales.
1.24 Definición.
Se dice que un espacio de Banach X es débilmente secuencialmente completo cuando (X, ω) es secuencialmente completo. Si toda sucesión
de vectores de X que converja en la topología débil también converge en norma, se dice que el espacio de Banach X tiene la propiedad
de Schur. Es trivial que un espacio de dimensión finita tiene la propiedad de Schur y ya hemos comentado que un espacio reflexivo es
débilmente secuencialmente completo.
1.25 Proposición.
Sea X un espacio de Banach. Entonces:
(a) Si X tiene la propiedad de Schur, entonces X es débilmente secuencialmente completo.
(b) Si X tiene la propiedad de Schur, entonces todo espacio normado isomorfo a un subespacio de X tiene la propiedad de Schur.
(c) Si X es débilmente secuencialmente completo, todo espacio de Banach isomorfo a un subespacio de X es débilmente secuencialmente
completo.
Demostración. (a). Sea (xn ) una sucesión ω-Cauchy; si (xn ) no fuese de Cauchy en norma, existirían ε > 0 y dos aplicaciones estrictamente
crecientes σ y τ de N en N tales que
xσ(n) − xτ(n) > ε
(n ∈ N).
Por ser (xn ) débil-Cauchy, la sucesión xσ(n) − xτ(n) converge débilmente a cero y, ya que X tiene la propiedad de Schur, converge en
norma a cero, una contradicción. Por tanto, (xn ) es de Cauchy en norma y, por ser X espacio de Banach, (xn ) es convergente en norma y,
consecuentemente, débilmente convergente.
(b) y (c) son consecuencia de que todo isomorfismo entre espacios normados es un isomorfismo para las topologías débiles (Teorema 1.15) y de que la topología débil de un subespacio es la restricción de la topología débil del espacio total.
A
Miguel Martín Suárez
ρ
B
×
5. Topologías débiles
16
1.26 Teorema (Lema de Schur, 1920).
`1 tiene la propiedad de Schur.
Demostración. De lo contrario, existiría una sucesión (xn ) de elementos de `1 verificando que
kxn k > 1
(n ∈ N)
(5.1)
y convergente a cero en la topología débil de `1 y, en particular,
(k ∈ N).
lı́m xn (k) = 0
n→∞
(5.2)
En efecto, si (yn ) es una sucesión en X que converge débilmente a y0 y no en norma, existirán ε > 0 y una sucesión parcial de (yn ), que
ω
podemos seguir llamando (yn ), tales que kyn − y0 k > ε. Notando xn = ε−1 (yn − y0 ), se tiene que (xn ) −→ 0 y kxn k > 1 para todo n ∈ N.
A partir de (5.1) y (5.2) conseguimos una sucesión parcial (xσ(n) ) tal que la mayor contribución a la norma de xσ(n) se debe a términos
cada vez más avanzados. La construcción se conoce como “método de sliding hump” o “método de la joroba deslizante”. Concretamente,
construimos por inducción dos aplicaciones estrictamente crecientes σ, τ : N −→ N verificando que τ(1) = 1 y las dos condiciones siguientes:
τ(n)
1
∑ |xσ(n)(k)| 6 5
(n ∈ N),
(5.3)
1
5
(n ∈ N).
(5.4)
k=1
∞
∑
k=τ(n+1)+1
|xσ(n) (k)| 6
En efecto, (5.2) nos permite definir σ(1) de forma que se cumpla (5.3) para n = 1. Construidos τ(n) y σ(n), por estar xσ(n) ∈ `1 , podemos
tomar τ(n + 1) ∈ N de forma que se cumpla (5.4) y, aplicando nuevamente (5.2), encontramos σ(n + 1) de forma que se verifique (5.3) con
n + 1 en lugar de n. Construidas pues τ y σ, a partir de (5.1), (5.3) y (5.4) tenemos que
τ(n+1)
∑
k=τ(n)+1
|xσ(n) (k)| >
3
5
(n ∈ N).
(5.5)
para τ(n) + 1 6 k 6 τ(n + 1), n ∈ N,
(5.6)
Tomamos ahora una sucesión (αk ) de escalares de módulo 1 tales que
αk xσ(n) (k) = |xσ(n) (k)|
A
Miguel Martín Suárez
ρ
B
×
5. Topologías débiles
17
y escribimos
∞
f (x) =
∑ αk x(k)
k=1
(x ∈ `1 ),
obteniendo un elemento de `∗1 . Pero, para cualquier natural n, se tiene que
| f (xσ(n) )| >
τ(n+1)
τ(n)
∑
|xσ(n) (k)| − ∑ |xσ(n) (k)| −
k=τ(n)+1
∞
k=1
1
|xσ(n) (k)| > ,
5
k=τ(n+1)+1
∑
donde se han aplicado las ecuaciones (5.6), (5.5), (5.3) y (5.4). Así pues, hemos probado (xσ(n) ) no converge a cero en la topología débil,
siendo una sucesión parcial de (xn ), que si lo hacía. Una flagrante contradicción.
Antes de extraer consecuencias importantes del teorema anterior, observemos que la propiedad de Schur es bastante restrictiva:
1.27 Proposición.
Sea X un espacio de Banach de dimensión infinita tal que X ∗ es separable. Entonces X no tiene la propiedad de Schur.
Demostración. Sea { fn : n ∈ N} un conjunto numerable denso en X ∗ para la topología de la norma. Para cada n ∈ N, por ser X de dimensión
infinita, existirá xn ∈ X tal que
kxn k = 1,
xn ∈
n
\
ker fk .
k=1
Es claro que fk (xn ) n∈N −→ 0 para cada k ∈ N; como la sucesión (xn ) está acotada en norma y { fn : n ∈ N} es denso en X ∗ , se sigue
ω
(véase el Lema 1.18, si se quiere) que (xn ) −→ 0. Pero kxn k = 1 para cada n ∈ N.
Veamos ya algunas consecuencias del Lema de Schur y de la Proposición 1.25:
1.28 Corolario.
Ningún subespacio de dimensión infinita de `1 tiene dual separable.
1.29 Corolario.
Si X es un subespacio cerrado de dimensión infinita de c0 o ` p con 1 < p < ∞, entonces X no puede ser isomorfo a un subespacio de `1 .
A
Miguel Martín Suárez
ρ
B
×
5. Topologías débiles
18
Demostración. X ∗ es separable por ser isométricamente isomorfo a un cociente de c∗0 = `1 o de `∗p = `q con
isomorfo a ningún subespacio de `1 por el corolario anterior.
1
p
+ 1q = 1, luego no puede ser
Como consecuencia, obtenemos que al expresar un espacio de Banach separable como cociente de `1 por un subespacio cerrado, dicho
subespacio no suele estar complementado en `1 . Viendo el aspecto positivo, abundan los subespacios no complementados de `1 :
1.30 Ejemplo.
Si Y es un subespacio cerrado de `1 tal que `1 /Y es isomorfo a c0 o a ` p con 1 < p < ∞, entonces, Y no está complementado en `1 . En efecto,
si Y tuviese un complemento topológico Z, entonces Z sería isomorfo `1 /Y y, por tanto, a c0 o ` p , en contradicción con el corolario anterior.
2.
Teoremas de Goldstine y Banach-Alaoglu. Consecuencias
Queremos ahora mostrar la principal utilidad de las topología débil y débil-*: tienen muchos conjuntos compactos.
Comenzamos estableciendo el Teorema de Goldstine, que es una mejora cuantitativa de la densidad débil-* de un espacio normado en su
bidual.
2.1 Teorema (de Goldstine).
ω∗
Si X es un espacio normado, entonces JX (BX ) es denso en BX ∗∗ para la topología σ(X ∗∗ , X ∗ ). De manera más sugestiva, BX = BX ∗∗ .
ω∗
ω∗
Demostración. Es claro que BX ⊆ BX ∗∗ , pues BX ⊂ BX ∗∗ y BX ∗∗ es ω∗ -cerrado. Escribamos W = BX y observemos que, para cada
x0∗∗ ∈ X ∗∗ \W , el Teorema 1.7 aplicado a la topología σ(X ∗∗ , X ∗ ) nos proporciona un funcional f ∈ X ∗ tal que
x0∗∗ ( f ) > sup y∗∗ ( f ) > sup f (x) = k f k,
y∗∗ ∈W
x∈BX
donde hemos usado que BX ⊂ W . Deducimos entonces que kx0∗∗ k > 1, luego x0∗∗ ∈
/ BX ∗∗ .
ω
Si X es un espacio normado de dimensión infinita, sabemos, por una parte, que SX = BX y, por otra, que la topología débil de X es la
restricción de la topología débil-* de X ∗∗ . Todo ello, nos proporciona la siguiente consecuencia del Teorema de Goldstine:
2.2 Corolario.
Sea X un espacio normado de dimensión infinita. Entonces, JX (SX ) es densa en BX ∗∗ para la topología σ(X ∗∗ , X ∗ ).
A
Miguel Martín Suárez
ρ
B
×
5. Topologías débiles
19
Nuestro siguiente objetivo es el Teorema de Banach-Alaoglu, que nos proporciona la abundancia de conjuntos débil-* compactos en un
espacio de Banach dual. El único ingrediente no trivial de su demostración es el Teorema de Tychonoff, que establece la compacidad de un
producto arbitrario de compactos.
2.3 Teorema (de Banach-Alaoglu).
La bola cerrada unidad del dual de un espacio normado es ω∗ -compacta. Como consecuencia, todo subconjunto del dual de un espacio
normado que sea ω∗ -cerrado y acotado en norma es ω∗ -compacto.
Demostración. Para cada x ∈ X, notamos Dx = {λ ∈ K : |λ| 6 kxk}, que es un compacto de K y, gracias al Teorema de Tychonoff, tenemos
que I = ∏ Dx con la topología producto es compacto. Podemos ver a I como el espacio de las funciones f : X −→ K tales que | f (x)| 6 kxk
x∈X
para todo x ∈ X y BX ∗ es claramente el subconjunto de I formado por las funciones lineales; además, la topología débil-* de X ∗ coincide con
la inducida por KX (con la topología producto), luego la topología de BX ∗ coincide con la inducida por la de I. Todo lo que queda por hacer
es probar que BX ∗ es cerrado en I. Vamos a ello:
Para cada x, y ∈ X y λ ∈ K, las funciones
ϕx,y (ξ) = ξ(x) + ξ(y) − ξ(x + y),
son claramente continuas en KX y
BX ∗ = I ∩
\
x,y∈X
(ξ ∈ KX )
ψx,λ (ξ) = ξ(λx) − λξ(x)
!
ϕ−1
x,y ({0}) ∩
\
x∈X, λ∈K
!
ψ−1
x,λ ({0}) ,
luego es cerrado en I.
La primera consecuencia del Teorema de Banach-Alaoglu que vamos a presentar es una caracterización de la reflexividad que se obtiene
fácilmente combinándolo con el Teorema de Goldstine. Si X es un espacio normado, sabemos que BX ∗∗ es compacto para la topología débil* de X ∗∗ ; si X es reflexivo, esto es lo mismo que decir que BX es compacto para la topología débil de X. Recíprocamente, si BX es débil
compacto, JX (BX ) será débil-* compacto, luego débil-* cerrado en X ∗∗ , y el Teorema de Goldstine nos dice que BX ∗∗ = JX (BX ). Hemos
probado:
2.4 Corolario (Teorema de Dieudonné).
Un espacio normado es reflexivo si, y sólo si, su bola unidad es débilmente compacta. En consecuencia, cualquier conjunto débil-cerrado y
acotado de un espacio reflexivo es débil-compacto.
A
Miguel Martín Suárez
ρ
B
×
5. Topologías débiles
20
A continuación obtenemos la consecuencia más llamativa del Teorema de Banach-Alaoglu. Sea X un espacio normado y consideremos
el espacio topológico compacto de Hausdorff K = (BX ∗ , ω∗ ); si para x ∈ X notamos xe a la restricción a K de JX (x), es claro que xe ∈ C(K) y
que la aplicación x −→ xe, de X en C(K) es lineal e isométrica. Se prueba así:
2.5 Corolario.
Dado un espacio normado X, existe un espacio topológico compacto de Hausdorff K, tal que X es isométricamente isomorfo a un subespacio
de C(K).
2.1.
Metrizabilidad de las topologías débiles
Puede decirse que el corolario anterior más que una representación auténticamente útil para un espacio normado abstracto, muestra
cuán variados pueden ser los subespacios de C(K). No obstante, veremos pronto que en caso separable se puede elegir el compacto K de
forma más apropiada. Necesitamos ver que, bajo ciertas hipótesis, las topologías débil y débil-* están generadas por distancias en conjuntos
acotados.
Se dice que un espacio topológico T es metrizable si es homeomorfo a un espacio métrico, esto es, si existe una distancia en T que genere
su topología.
2.6 Proposición.
Sea X un espacio normado.
(a) Si X es separable, entonces (BX ∗ , ω∗ ) es metrizable y, por tanto, lo mismo le pasa a cualquier subconjunto acotado de X ∗ .
(b) Si X ∗ es separable, entonces (BX , ω) es metrizable y, por tanto, lo mismo le pasa a cualquier subconjunto acotado de X.
Demostración. (a). Fijamos un conjunto denso {xn : n ∈ N} en SX , definimos
d(x∗ , y∗ ) =
∞
1
∑ 2n |x∗(xn) − y∗(xn)|
n=1
(x∗ , y∗ ∈ BX ∗ ),
que es claramente una distancia en BX ∗ y queremos probar que la aplicación Id : (BX ∗ , ω∗ ) −→ (BX ∗ , d) es un homeomorfismo. Como
(BX ∗ , ω∗ ) es un espacio topológico compacto de Hausdorff (Teorema de Banach-Alaoglu), basta para ello probar que Id es continua. Sea
pues O = {x∗ ∈ BX ∗ : d(x∗ , x0∗ ) < ε} un abierto para la topología generada por d, donde x0∗ ∈ BX ∗ y ε > 0, y tomemos n0 ∈ N tal que
∞
1
1
ε
=
< .
∑
n
i
2 0 i=n0 +1 2
4
A
Miguel Martín Suárez
ρ
B
×
5. Topologías débiles
21
Es rutinario entonces comprobar que el ω∗ -entorno de x0∗
U = {x∗ ∈ BX ∗ : |x∗ (xi ) − x0∗ (xi )| < ε/2, i = 1, . . . , n0 }
está contenido en O.
(b). Si X ∗ es separable, (BX ∗∗ , ω∗ ) es metrizable por lo que acabamos de probar; entonces, (BX , ω) será metrizable por ser un subespacio
topológico suyo.
Ahora, si X es un espacio normado separable, tenemos una isometría lineal de X en C(K) donde lo nuevo ahora es que K es un espacio
métrico compacto. Un importante teorema de Topología General nos dice que K es imagen continua del conjunto ternario de Cantor ∆. Si
τ es una función continua de ∆ sobre K, la aplicación f −→ f ◦ τ es claramente una isometría lineal de C(K) en C(∆). Finalmente, cada
función continua en ∆ puede extenderse a una función continua en [0, 1] por el sencillo procedimiento de definir afínmente nuestra función
en cada uno de los subintervalos de [0, 1] que se suprimen para obtener ∆; de esta forma se obtiene una isometría lineal de C(∆) en C[0, 1].
Hemos probado:
2.7 Teorema (de Banach-Mazur).
Todo espacio normado separable es isométricamente isomorfo a un subespacio de C[0, 1].
Suele decirse que C[0, 1] es universal para la clase de los espacios normados separables. Recordemos que la existencia de un tal espacio
la demostramos con la única ayuda del Teorema de Hahn-Banach: `∞ . La ventaja de C[0, 1] sobre `∞ que hace al Teorema de Banach-Mazur
mucho más útil consiste en que C[0, 1] es, él mismo, separable y, además, tiene base de Schauder.
Otra aplicación de la ω-metrizabilidad de la bola unidad de un espacio con dual separable es la siguiente generalización del Teorema de
Bolzano-Weierstrass para espacios reflexivos:
2.8 Corolario.
Toda sucesión acotada en un espacio reflexivo tiene una parcial ω-convergente.
Demostración. Sea X un espacio reflexivo y (xn ) una sucesión tal que kxn k 6 M para todo n ∈ N. Si llamamos Y = lin({xn : n ∈ N})
tenemos, por un lado, que Y es reflexivo y MBY es ω-compacto y, por otro lado, que (M BY , ω) es metrizable porque Y ∗ es separable (Y lo es
y estamos en ambiente reflexivo). Basta recordar que una sucesión en un espacio métrico compacto tiene una parcial convergente.
Para la topología ω∗ tenemos un resultado análogo, válido sólo en caso separable:
A
Miguel Martín Suárez
ρ
B
×
5. Topologías débiles
22
2.9 Corolario.
Sea X un espacio normado separable. Entonces, cualquier sucesión acotada de X ∗ admite una parcial ω∗ -convergente.
La última aplicación de los resultados anteriores que vamos a presentar en esta sección nos dice que c0 está complementado en todo
superespacio separable, un resultado que ya conocíamos para `∞ sin necesidad de separabilidad.
2.10 Corolario (Teorema de Sobczyk).
Sea X un espacio normado separable, Y un subespacio cerrado de X y T ∈ L(Y, c0 ). Entonces existe S ∈ L(X, c0 ) tal que kSk 6 2kT k y la
restricción de S a Y coincide con T . Equivalentemente, si X es un espacio normado separable e Y es un subespacio de X isomorfo a c0 ,
entonces Y está complementado en X. Si de hecho Y es isométricamente isomorfo a c0 , entonces existe una proyección lineal continua P de
X sobre Y tal que kPk 6 2.
Demostración. Como X es separable, (BX ∗ , ω∗ ) es un espacio métrico compacto y podemos tomar una distancia d que genere su topología.
Para cada n ∈ N, ponemos
gn (y) = [T (y)](n)
(y ∈ Y ),
que es un elemento de Y ∗ y sea fn ∈ X ∗ una extensión Hahn-Banach de gn . El problema es ahora que (gn ) converge puntualmente a cero en
Y , pero no tenemos garantía de que ( fn ) converja puntualmente a cero en X, por lo que poniendo [S(x)](n) = fn (x) para n ∈ N y x ∈ X, no
tenemos garantía de que S tome valores en c0 .
Podemos suponer, sin perder generalidad, que kT k 6 1, luego
k fn k 6 1
(n ∈ N);
sea K = BX ∗ ∩ Y ⊥ , un subconjunto ω∗ compacto de BX ∗ , y vamos a probar que d( fn , K) −→ 0. De lo contrario, existiría una sucesión
parcial ( fσ(n) ) de ( fn ) convergente en la topología débil-∗ a un f ∈ BX ∗ (por ser X separable), verificando que
d( fσ(n) , K) > ε > 0
(n ∈ N)
para conveniente ε > 0. De f ∈
/ K deducimos que existe y ∈ Y tal que f (y) 6= 0, pero entonces
gσ(n) (y) = fσ(n) (y) −→ f (y) 6= 0,
luego gn (y) no converge a 0, una contradicción. Tenemos pues que d( fn , hn ) −→ 0 para conveniente sucesión (hn ) de puntos de K.
A
Miguel Martín Suárez
ρ
B
×
5. Topologías débiles
23
Definiendo
[S(x)](n) = fn (x) − hn (x)
(n ∈ N, x ∈ X),
S aplica X en c0 y se comprueba inmediatamente que S verifica las condiciones requeridas.
La separabilidad de X en el resultado anterior es esencial; recuérdese que c0 no está complementado en `∞ (Teorema de Philips). La
constante 2 es óptima; recuérdese que cualquier proyección lineal y continua P de c sobre c0 verifica kPk > 2.
3.
Puntos extremos. Teorema de Krein-Milman
En el plano, cualquier polígono convexo está generado, mediante envolvente convexa, por sus vértices. El principal objetivo de esta
sección es probar que el mismo resultado es válido para cualquier subconjunto convexo y débil-compacto de un espacio normado y cualquier
subconjunto convexo y débil-*-compacto de su dual, una vez que demos la noción general de “vértice” (punto extremo) y que sustituyamos
la envolvente convexa por envolvente convexo-cerrada en la correspondiente topología. Este es, esencialmente, el contenido del Teorema
de Krein-Milman, obtenido en 1940 y que generaliza a espacios de dimensión infinita el clásico Teorema de Minkowski-Carathéodory para
subconjuntos convexos y compactos de Rn .
3.1 Definición.
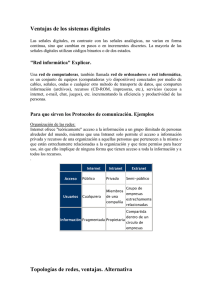
Sea A un subconjunto de un espacio vectorial y E un subconjunto no vacío de A; se dice que E es un subconjunto extremal de A si siempre
que un segmento con extremos en A tenga un punto intermedio en E, los extremos de dicho segmento pertenecen a E, esto es,
x, y ∈ A, 0 < t < 1, (1 − t)x + ty ∈ E
=⇒
x, y ∈ E.
Se dice que a ∈ A es un punto extremo de A cuando {a} es un subconjunto extremal de A, es decir,
x, y ∈ A, 0 < t < 1, (1 − t)x + ty = a
=⇒
x = y = a.
Notaremos ext(A) al conjunto (posiblemente vacío) de los puntos extremos de A.
Si X es un espacio normado y A ⊆ X, escribimos co(A) para denotar la envolvente convexa de A, el menor convexo de X que contiene
a A; escribimos co(A) = co(A) para denotar la envolvente convexo-cerrada, que es el menor conjunto convexo y cerrado (para la norma o
∗
para la topología débil) de X que contiene a A. Si B ⊂ X ∗ , entonces co ω (B) = co(B)
el menor conjunto convexo y débil-* cerrado de X ∗ que contiene a B.
ω∗
es la envolvente convexa y débil-* cerrada, que es
A
Miguel Martín Suárez
ρ
B
×
5. Topologías débiles
24
E
extremo
no extremo
PSfrag replacements
no extremo
A
extremo
E es un subconjunto extremal de A
Subconjunto extremal
y punto extremo
FiguraFigura
10.1:5.1:
Subconjunto
extremal
y punto extremo
El caso particular más interesante de la definición de punto extremo se presenta cuando el conjunto A es convexo. En este caso tenemos
varias reformulaciones de la definición de punto extremo que recogemos en el siguiente enunciado. Una de ellas nos dice que el escalar t
en la Proposición.
definición de punto extremo
puede
tomar igual
a 1/2; otra C
permite
combinaciones convexo
convexas de longitud
arbitraria.
La
10.3.2
Sea Xseun
espacio
vectorial,
⊂ Xconsiderar
un subconjunto
ye∈C
. Las siguientes
demostración es rutinaria.
afirmaciones son equivalentes:
3.2 Proposición.
Sea X un espacio vectorial, A ⊂ X un subconjunto convexo y a ∈ A. Las siguientes afirmaciones son equivalentes:
(a)
(b)
(c)
(d)
(e)
a ∈ ext(A).
a = 21 (x + y), x, y ∈ A =⇒ x = y = a.
x ∈ X, a ± x ∈ A =⇒ x = 0.
Si F es un subconjunto finito de A y a ∈ co(F), entonces a ∈ F.
A \ {a} es convexo.
En dimensión finita, tanto la existencia de puntos extremos de conjuntos convexos y compactos como la posibilidad de generar dichos
A
Miguel Martín Suárez
ρ
B
×
5. Topologías débiles
25
conjuntos mediante combinaciones convexas de puntos extremos son resultados clásicos de análisis convexo:
3.3 Teorema (de Minkowski-Carathéodory).
Sea K un subconjunto compacto y convexo de Rn . Entonces,
cada x ∈ K se puede escribir como combinación convexa de, a lo sumo, n + 1
puntos extremos de K. En particular, K = co ext(K) .
Demostración. Hacemos inducción sobre la dimensión. Si n = 1, K = [a, b] y el resultado es claro. Supongamos probado el resultado para
n − 1 y demostremos que es cierto para n. Sea K ⊂ Rn . Si la dimensión afín de K es menor que n, entonces existe un hiperplano H que
contiene a K y se aplica la hipótesis de inducción. Podemos pues suponer que la dimensión afín de K es n, esto es, existen a1 , . . . , an+1 ∈ K
/ Esto
afínmente independientes; es fácil comprobar que entonces el baricentro de a1 , . . . , an+1 es un punto interior de K, luego int(K) 6= 0.
n
nos permite, dado un punto frontera x de K, encontrar un hiperplano afín H de R tal que x ∈ H ∩ K. Este último conjunto es compacto
y convexo, y “vive” en un espacio vectorial de dimensión n − 1, luego la hipótesis de inducción nos dice que x se puede escribir como
combinación convexa de n puntos extremos de H ∩ K (que serán extremos de K por ser H ∩ K un subconjunto extremal de K. Por último, si
x es un punto interior de K, tómese un punto extremo y de K y nótese que x está en el segmento [y, z] para algún punto frontera z de K. Por
lo ya demostrado, z = ∑ni=1 λi ei con e1 , . . . , en ∈ ext(K), λ1 , . . . , λn ∈ [0, 1] y ∑ni=1 λi = 1. Entonces
!
n
n
∑ λi ei + (1 − α) y = ∑ (α λi) ei + (1 − α) y
x=α
i=1
i=1
para algún α ∈]0, 1[. Véase la figura 5.2.
Por otra parte, el siguiente ejemplo evidente de subconjunto extremal nos será muy útil, tanto en la demostración del Teorema de KreinMilman como en sus aplicaciones:
3.4 Lema.
Sea A un subconjunto de un espacio vectorial X, f ∈ X ] y supongamos que la función Re f alcanza su máximo en A. Entonces el conjunto
E = {x ∈ A : Re f (x) = máx Re f (A)}
es un subconjunto extremal de A.
Notemos que todo punto extremo de un conjunto A es un subconjunto extremal minimal. La búsqueda de puntos extremos de A debe por
tanto orientarse hacia la consecución de subconjuntos extremales progresivamente más pequeños. El propio conjunto A es, trivialmente, un
A
Miguel Martín Suárez
ρ
B
×
5. Topologías débiles
26
H
e1
z
x0
e2
y
Figura 5.2: Minkowski-Carathéodory
subconjunto extremal de A y el lema anterior nos da una idea para encontrar otro más pequeño bajo ciertas hipótesis. Si A tiene más de un
punto, habrá un funcional lineal f tal que Re f no sea constante en A pero ¿cómo asegurarnos de que Re f alcanza su máximo en A? La
respuesta es obvia: siendo A compacto en una topología que haga continuo a f . Bastará por tanto, que los funcionales lineales continuos para
una cierta topología separen puntos y que A sea compacto en esa topología.
3.5 Teorema.
Sea X un espacio normado. Si A es un subconjunto débil-compacto de X, entonces todo subconjunto extremal ω-cerrado de A contiene un
punto extremo de A. En particular, A tiene puntos extremos. Análogamente, si B es un subconjunto débil-*-compacto de X ∗ , entonces todo
subconjunto extremal ω∗ -cerrado de B contiene un punto extremo. En particular B tiene puntos extremos.
Demostración. Basta hacer la prueba para la topología débil-*, pues si A es débil-compacto en X entonces JX (A) es ω∗ -compacto en X ∗∗ y
sus subconjuntos ω-cerrados son ω∗ -cerrados en X ∗∗ .
Por tanto, sea B un subconjunto extremal ω∗ -cerrado de A. La familia E de los subconjuntos extremales ω∗ -cerrados no vacíos de B
está inductivamente ordenada por inclusión ya que, por ser B ω∗ -compacto, la intersección de una cadena de subconjuntos ω∗ -cerrados de
B es un subconjunto no vacío y, evidentemente, ω∗ -cerrado de B, mientras que es igualmente evidente que la intersección de subconjuntos
extremales de B es un subconjunto extremal de B, siempre que no sea vacía. Así pues, todo elemento de E contiene un elemento minimal y
bastará comprobar que todo elemento minimal de E se reduce a un punto pues, en este caso, dicho punto será un punto extremo de B y por
tanto de A. Si F ∈ E es minimal y x∗ , y∗ ∈ F con x∗ 6= y∗ , tomamos u ∈ X tal que Re y∗ (u) 6= Re x∗ (u) y el lema anterior nos dice que el
A
Miguel Martín Suárez
ρ
B
×
5. Topologías débiles
conjunto
27
E = z∗ ∈ F : Re z∗ (u) = máx Re JX (u) (F)
(que no es vacío por la ω∗ -compacidad de F) es un subconjunto extremal de F. Se sigue fácilmente que E ∈ E mientras que E está contenido
estrictamente en F, pues no puede ser que x∗ , y∗ ∈ E; llegamos a contradicción.
Obtenemos ya el resultado fundamental de la sección:
3.6 Corolario (Teorema de Krein-Milman).
Sea X un espacio normado.
(a) Si A es un subconjunto ω-compacto de X, entonces
y, si A es convexo, entonces se da la igualdad.
(b) Si B es un subconjunto ω∗ -compacto de X ∗ , entonces
A ⊆ co ext(A)
∗
B ⊆ co ω ext(B)
y, si B es convexo, entonces se da la igualdad.
∗
Demostración. Comenzamos por (b). El conjunto B = co ω (ext(A)) es convexo y ω∗ -cerrado en X ∗ . Si existiese a∗ ∈ A \ B, el Teorema 1.7
nos daría un elemento x ∈ X tal que
sup Re JX (x) (B) < Re a∗ (x).
Entonces, el conjunto E = x∗ ∈ A : Re x∗ (x) = máx Re JX (x) (A) sería un subconjunto extremal, ω∗ -cerrado y no vacío de A tal que
/ en contradicción con el teorema anterior.
E ∩ B = 0/ y, en particular, E ∩ ext(A) = 0,
∗
(a). Si A es ω-compacto, entonces JX (A) será ω∗ -compacto en X ∗∗ , luego el apartado (b) nos dice que JX (A) ⊆ co ω (ext(A)), luego
∗
A ≡ JX (A) ∩ X ⊆ co ω (ext(A))
\
X = co ω (ext(A)) = co(ext(A)).
Los siguientes ejemplos muestran que la hipótesis de compacidad no puede suprimirse en los resultados anteriores, si bien tampoco
puede decirse que sea una condición necesaria.
3.7 Ejemplos.
A
Miguel Martín Suárez
ρ
B
×
5. Topologías débiles
28
(a) La bola cerrada unidad de c0 (un subconjunto
convexo,
cerrado y acotado de un espacio de Banach) carece de puntos extremos. En
efecto, Si x ∈ c0 y kxk 6 1, es claro que x ± 12 en 6 1 para n ∈ N suficientemente avanzado, donde (en ) es la base canónica de c0 .
(b) Se comprueba fácilmente que
ext (B`1 ) = {λen : λ ∈ K, |λ| = 1, n ∈ N}
donde (en ) es ahora la base canónica de `1 . Como consecuencia, se comprueba fácilmente que
B`1 = co ext (B`1 ) ,
aunque B`1 no sea ω-compacto.
Pasemos a considerar una especie de “recíproco” del Teorema de Krein-Milman que en la literatura recibe a veces el nombre de Teorema
de Krein-Milman “revertido” o Teorema de Milman, y que resulta muy útil para detectar los puntos extremos de un conjunto convexo y
compacto. De alguna forma, el teorema afirma que los puntos extremos nos proporcionan la forma “más económica” de generar un conjunto
por envolvente convexo-cerrada.
3.8 Teorema (de Krein-Milman revertido).
ω
Sea X un espacio normado y A un subconjunto no vacío, convexo y ω-compacto de X. Si E ⊂ A verifica que A = co(E), entonces ext(A) ⊆ E .
∗
ω∗
Si B es un subconjunto no vacío, convexo y ω∗ -compacto de X ∗ y F ⊂ B verifica que B = coω (F), entonces ext(B) ⊆ F .
Demostración. De nuevo basta hacer la demostración para la topología débil-*. Ya en este caso, podemos suponer que E es ω∗ -cerrado, ya
∗
∗
ω∗ que, evidentemente, co ω (E) = co ω E . Fijemos x0∗ ∈ ext(A) y veamos que (x0∗ +V ) ∩ E 6= 0/ para todo entorno de cero débil-* V , que
podemos suponer de la forma
V = {x∗ ∈ X ∗ : |x∗ (xi )| 6 1, i = 1, . . . , n}
∗ ∈ E tales que
con x1 , . . . , xn ∈ X, n ∈ N. Como E es ω∗ -compacto, existen x1∗ , x2∗ , . . . , xm
E=
m
[
j=1
Notemos
E ∩ (x∗j +V ) .
∗
∗
K j = co ω E ∩ (x∗j +V ) ⊂ co ω (E) = A
(5.7)
( j = 1, . . . , n)
A
Miguel Martín Suárez
ρ
B
×
5. Topologías débiles
29
y observemos que los conjuntos K j son ω∗ -compactos (ω∗ -cerrados en A, que es ω∗ -compacto) y convexos, luego se comprueba inmediatamente que
∗
co ω K1 ∪ · · · ∪ Km = co K1 ∪ · · · ∪ Km .
Pero entonces, usando (5.7), se tiene que E ⊆
Sm
j=1 K j ,
de donde
∗
∗
x0∗ ∈ A = co ω (E) ⊆ co ω K1 ∪ · · · ∪ Km = co K1 ∪ · · · ∪ Km .
Por ser x0∗ un punto extremo, se tiene que x0∗ ∈ K j para algún j ∈ {1, . . . , m} y, como
∗
K j = co ω E ∩ (x∗j +V ) ⊆ x∗j +V
(para lo que sólo se necesita que V sea convexo y ω∗ -cerrado), se sigue que x0∗ = x∗j + v∗ con v∗ ∈ V . Finalmente, x∗j = x0∗ − v∗ ∈ (x0∗ +V ) ∩ E
(pues V es equilibrado).
Surge de manera natural la pregunta de si el conjunto ext(A) es cerrado. Ello no ocurre ni siquiera en dimensión finita.
3.9 Ejemplo.
Consideremos en R3 la circunferencia
C = (x, y, z) ∈ R3 : (x − 1)2 + y2 = 1, z = 0
y sea A = co C ∪ {(0, 0, 1), (0, 0, −1)} . Entonces A es un subconjunto convexo y compacto de R3 y es fácil comprobar que
ext(A) = C \ {(0, 0, 0)} ∪ {(0, 0, 1), (0, 0, −1)},
que no es cerrado (ver figura 5.3).
Es el momento de recordar que, por los Teoremas de Banach-Alaoglu y Dieudonné: la bola unidad cerrada del dual de cualquier espacio
normado es débil-*-compacta y la bola unidad cerrada de un espacio reflexivo es débil-compacta. Ello nos lleva a las siguientes consecuencias
de los Teoremas de Krein-Milman y Krein-Milman revertido.
3.10 Corolario.
A
Miguel Martín Suárez
ρ
B
×
158
Capítulo 5. Topologías débiles
5. Topologías débiles
30
Figura 5.2: Conjunto de puntos extremos no cerrado
Figura 5.3: Conjunto de puntos extremos no cerrado
∗
ω∗ extunidad
momento
de Entonces,
recordar Bque
del dual
espacio
normado
esB ⊆ X ∗ ,
(a) Sea X Es
un el
espacio
normado.
cobola
(BX ∗ ) . cerrada
Recíprocamente,
si Bde
= coω (B) para
un cierto
conjunto
X ∗ =la
X ∗ cualquier
ω∗
débil-*-compacta
de Banach-Alaoglu) y que la bola unidad cerrada de un espacio reflexivo es
entonces
ext (BX ∗ ) ⊆ B (Teorema
.
débil-compacta
(Teorema
de Dieudonné).
Ello
lleva a las siguientes
consecuencias
los Teoremas
. Recíprocamente,
si BX = co(A)
para un ciertode
conjunto
A ⊆ X, entonces
(b) Sea
X un espacio reflexivo.
Entonces,
BX = co ext (B
X ) nos
ω
extde
(BXKrein-Milman
)⊆A .
y Krein-Milman revertido:
Demostración.
(a). Viendo a x como elemento de X ∗∗ , se tiene que el conjunto
5.3.9 Corolario.
∗
∗
ω ∗ Re [JX (x)](B
{xEntonces,
∈ BX ∗ : ReBxX∗∗(x)
)}
(a) Sea X un espacio normado.
==comáx
si BX ∗ = coω ( B)
ex ( BX ∗ ) X. ∗Recíprocamente,
ω∗
∗ , entonces ex ( B ∗ ) ⊆
un cierto
conjunto es
B⊆
B .
(no vacío por elpara
Teorema
de Hahn-Banach)
un X
subconjunto
extremal Xdel ω∗ -compacto
BX ∗ , luego contiene un punto extremo. Es rutinario
comprobar(b)
queSea X un espacio reflexivo. Entonces, B X = co ex ( BX ) . Recíprocamente, si BX = co( A) para un
ω X ∗ ) = kxk,
máx Re [J (x)](B
cierto conjunto A ⊆ X , entonces ex ( BX ) ⊆X A .
ya que λBX ∗ = BX ∗ para todo λ ∈ K con |λ| = 1. (b) es consecuencia inmediata de (a).
Ello nos Ello
dice, nos
en particular,
el conjunto
de el
puntos
extremos
la bolaextremos
dual separade
loslapuntos
de X. De
hecho,
tiene mucho
dice, enque
particular,
que
conjunto
de de
puntos
bola dual
separa
lossepuntos
de más:
X. De hecho, se tiene mucho más:
A
Miguel Martín Suárez
5.3.10 Corolario.
ρ
B
×
5. Topologías débiles
31
3.11 Corolario.
(a) Si X es un espacio normado, para cada x ∈ X existe x∗ ∈ ext (BX ∗ ) tal que Re x∗ (x) = kxk.
(b) Si X es un espacio reflexivo, para cada x∗ ∈ X ∗ existe x ∈ ext (BX ) tal que Re x∗ (x) = kx∗ k.
3.1.
Una aplicación: Principio del máximo de Bauer
Como primera aplicación de esta sección presentamos un resultado básico en teoría de optimización que se conoce con el nombre de
“Principio del máximo de Bauer”. Partimos del siguiente lema de Topología elemental:
3.12 Lema.
Si K es un espacio topológico compacto de Hausdorff y f : K −→ R es una función semicontinua superiormente, entonces f alcanza un
máximo en K.
El problema que nos planteamos es detectar los puntos de K donde f alcanza su máximo y el Teorema de Krein-Milman nos dará
información al respecto, suponiendo que K es un subconjunto convexo y que f verifica una hipótesis más débil que la convexidad.
3.13 Corolario (Principio del máximo de Bauer).
Sea X un espacio normado, K un subconjunto no vacío convexo y ω-compacto de X y f : (K, ω) −→ R una función semicontinua superiormente con
f (1 − t) x + t y 6 máx{ f (x), f (y)}
x, y ∈ A, t ∈ [0, 1]
(en particular, si f es convexa). Entonces f alcanza su máximo en un punto extremo de K, es decir, existe x0 ∈ ext(K) tal que f (x) 6 f (x0 )
para todo x ∈ K.
Demostración. Es rutinario comprobar que el conjunto E = {x ∈ A : f (x) = máx f (A)} es un subconjunto extremal de A, luego obtenemos
que E contiene un punto extremo de A (Teorema 3.5).
A
Miguel Martín Suárez
ρ
B
×
5. Topologías débiles
3.2.
32
Una aplicación: el Teorema clásico de Banach-Stone
Una sencilla caracterización de los puntos extremos en la bola unidad del dual de C(K), que deducimos del Teorema de Krein-Milman
revertido, nos permite obtener fácilmente el Teorema clásico de Banach-Stone, que describe los isomorfismos isométricos de C(K) sobre
C(H), siendo K y H espacios topológicos compactos de Hausdorff, y sobre todo, prueba que el compacto K está determinado por el espacio
de Banach C(K). Para evitar tediosas repeticiones, fijamos (más bien recordamos) la siguiente terminología:
3.14 Notación.
Si K es un espacio topológico compacto de Hausdorff, como ya sabemos, C(K) denota al espacio de Banach de las funciones continuas de
K en K con su norma natural. Para t ∈ K, definimos δt : C(K) −→ K por
δt (x) = x(t)
x ∈ C(K) .
Es claro que δt ∈ C(K)∗ y que kδt k = 1.
Cuando ello no dé lugar a confusión usaremos simplemente el término “compacto” como abreviatura de “espacio topológico compacto
de Hausdorff”. Escribimos
D = {λ ∈ K : |λ| 6 1}
y
T = {λ ∈ K : |λ| = 1};
usaremos libremente el hecho elemental de que T = ext(D).
La clave para la demostración del Teorema clásico de Banach-Stone es la siguiente caracterización de los puntos extremos de las bolas
unidad de C(K) y C(K)∗ . En el caso de C(K) las cosas son realmente fáciles; para C(K)∗ usaremos la ω∗ -compacidad de su bola y el Teorema
de Krein-Milman revertido.
3.15 Teorema.
Para K compacto se tiene:
(a) ext BC(K) = {x ∈ C(K) : x(K) ⊆ T}.
e donde K
e = {δt : t ∈ K}.
(b) (Arens-Kelley). ext BC(K)∗ = T K,
Demostración. (a). Si x ∈ C(K) con x(K) ⊆ T y ponemos x = 21 (y+z) donde y, z ∈ BC(K) , de ser x(t) = 12 (y(t) + z(t)) con x(t) ∈ T, y(t), z(t) ∈
D, deducimos que y(t) = z(t) = x(t), y esto para cada t ∈ K, por tanto x ∈ ext BC(K) . Recíprocamente, para x ∈ ext BC(K) , pongamos
y(t) = 1 − |x(t)|
(t ∈ K);
A
Miguel Martín Suárez
ρ
B
×
5. Topologías débiles
33
es fácil ver que x ± y ∈ BC(K) , luego y = 0, esto es, |x(t)| = 1 para todo t ∈ K.
(b). Para una inclusión (la fácil) basta probar que δt ∈ ext BC(K)∗ para cualquier t ∈ K (la multiplicación por un escalar de módulo 1
conserva los puntos extremos): pongamos δt = 12 (x∗ + y∗ ) con x∗ , y∗ ∈ BC(K)∗ . Si x ∈ BC(K) es tal que x(t) = 1, de 1 = 12 (x∗ (x) + y∗ (x)) con
x∗ (x), y∗ (x) ∈ D, obtenemos
x∗ (x) = y∗ (x) = δt (x) = 1;
en particular,
x∗ (u) = y∗ (u) = δt (u) = 1,
donde u es la función constantemente igual a 1 en K. Si ahora y ∈ C(K) verifica que y(K) ⊂ [0, 1] con y(t) = 0, aplicando lo anterior a
x = u − y, obtenemos también x∗ (y) = y∗ (y) = 0. La condición y(K) ⊂ [0, 1] se elimina fácilmente en vista de la linealidad de x∗ e y∗ :
y = (Re y)+ − (Re y)− + i(Re y)+ − i(Re y)−
y ∈ C(K) ,
luego
ker δt ⊆ ker x∗ ∩ ker y∗
lo que implica claramente que x∗ = y∗ = δt .
e Se deduce inmediatamente de la definición de la topología débil-* que la aplicación t 7−→ δt , de K
Recíprocamente, pongamos E = TK.
∗
∗
en C(K) , es continua para dicha topología. Como consecuencia, E es un subconjunto ω∗ -compacto de BC(K)∗ . Sea A = coω (E) y veamos
que BC(K)∗ = A; en efecto, si x0∗ ∈ C(K)∗ \ A, usando el Teorema de separación para la topología ω∗ (Teorema 1.7) obtenemos una función
f ∈ C(K) tal que
sup Re x∗ ( f ) 6 1
y
Re x0∗ ( f ) > 1.
Como D E = E, se tiene que
x∗ ∈A
k f k = máx | f (t)| = máx |δt ( f )| 6 sup |x∗ ( f )| 6 sup Re x∗ ( f ) 6 1,
t∈K
t∈K
x∗ ∈A
x∗ ∈A
luego kx0∗ k > Re x0∗ ( f ) > 1, esto es, x0∗ ∈
/ BC(K)∗ . Aplicando ahora el Teorema de Krein-Milman revertido, tenemos que
ω∗
ext BC(K)∗ ⊆ E = E,
como queríamos.
Como consecuencia fácil del teorema anterior obtenemos:
A
Miguel Martín Suárez
ρ
B
×
5. Topologías débiles
34
3.16 Corolario (Teorema de Banach-Stone clásico).
Sean H y K compactos y Φ un isomorfismo isométrico de C(H) sobre C(K). Entonces, existe un homeomorfismo σ de K sobre H y una
función θ ∈ C(K) con θ(K) ⊆ T tales que
Φ(x) (t) = θ(t) x(σ(t))
t ∈ K, x ∈ C(H) .
En particular, si los espacios de Banach C(H) y C(K) son isométricamente isomorfos, entonces H y K son homeomorfos.
Demostración. Sea u la función constantemente igual a 1 en H y θ = Φ(u). Por el teorema anterior, se tiene que u ∈ ext BC(H) luego,
siendo Φ una biyección lineal e isométrica, deducimos que también θ ∈ ext BC(K) y el mismo teorema nos dice que |θ(t)| = 1 para todo
t ∈ K. Si para x ∈ C(H) definimos
[Φ(x)](t)
(t ∈ K),
[Ψ(x)](t) =
θ(t)
es claro que Ψ sigue siendo un isomorfismo isométrico de C(H) sobre C(K), pero además verifica que Ψ(u) = v, donde ahora v es la función
constantemente igual a 1 en K. Entonces, Ψ∗ es un isomorfismo isométrico de C(K)∗ sobre C(H)∗ y, por tanto,
Ψ∗ ext BC(K)∗ = ext BC(H)∗ .
Aplicando la segunda parte del teorema anterior, para cada t ∈ K tendremos que Ψ∗ (δt ) = λ(t) δσ(t) con λ(t) ∈ T, σ(t) ∈ H; ahora bien,
λ(t) = λ(t)δσ(t) (u) = [Ψ∗ (δt )](u) = δt (v) = 1,
luego tenemos, de hecho, Ψ∗ (δt ) = δσ(t) para cada t ∈ K. Se comprueba rutinariamente que σ es una biyección de K sobre H. Si consideramos
los conjuntos
e = {δt : t ∈ K} ⊂ C(K)∗ ,
e = {δs : s ∈ H} ⊂ C(H)∗ ,
K
H
eyH
e respectivamente, cuando
ya hemos comentado que las aplicaciones t 7−→ δt y s 7−→ δs son sendos homeomorfismos de K y H sobre K
∗
e en H
e es continua
portan las respectivas topologías ω . Probar que σ es continua equivale por tanto a probar que la aplicación δt 7−→ δσ(t) de K
e de Ψ∗ , que es ω∗ -continua. Así pues, σ es continua, luego
para las topologías ω∗ , pero esta aplicación no es otra cosa que la restricción a K
un homeomorfismo. Finalmente, para x ∈ C(H) y t ∈ K, tenemos
Φ(x) (t) = θ(t)[Ψ(x)](t) = θ(t)δt (Ψ(x)) = θ(t)[Ψ∗ (δt )](x) = θ(t)δσ(t) (x) = θ(t)x(σ(t)).
Resulta ahora especialmente sorprendente el siguiente resultado, debido a Milyutin: si K y H son dos compactos metrizables y no
numerables, entonces C(K) y C(H) son isomorfos.
A
Miguel Martín Suárez
ρ
B
×
5. Topologías débiles
35
Glosario
ω
cierre débil: A , 5∗
ω
cierre débil-*: B , 5
co(A), 13, 23
co(A), 23
∗
coω (A), 23
conjunto
extremal, 23
convergencia débil de sucesiones, 11
convergencia débil-* de sucesiones, 11
débil-* convergente, 11
débil-*-Cauchy, 11
débil-Cauchy, 11
T (esfera unidad de K), 32
Teorema
de Arens-Kelley, 32
de Banach-Alaoglu, 19
de Banach-Mazur, 21
de Banach-Stone clásico, 34
de Dieudonné, 19
de Dixmier, 9
de Goldstine, 18
de Krein-Milman, 27
de Krein-Milman revertido, 28
de Mazur, 7
de Minkowski-Carathéodory, 25
de separación de convexos para la topología débil, 6
de separación de convexos para la topología débil-*, 6
Principio del máximo de Bauer, 31
topología
débil de un espacio normado, 2
débil-* del dual de un espacio normado, 2
D (bola unidad de K), 32
envolvente
convexa, 13, 23
convexa y débil-* cerrada, 23
convexo-cerrada, 23
espacio
débil-* secuencialmente completo, 14
débilmente secuencialmente completo, 15
metrizable, 20
Lema
de Schur, 16
Método de la joroba deslizante, 16
ω (en espacios normados), 2
ω∗ (en espacios normados), 2
Propiedad
de Schur, 15
punto extremo, 23
σ(X ∗ , X), 2
σ(X, X ∗ ), 2
sucesión
débil convergente, 11
A
Miguel Martín Suárez
ρ
B
×