Navegación Aérea - Tema 4: Sistema de navegación autónomo
Anuncio

Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
Navegación Aérea
Tema 4: Sistema de navegación autónomo. Navegación inercial.
Errores.
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
La IMU: sensores inerciales
Mecanización en ejes n y en ejes e
Alineamiento inicial
Sistema de navegación autónomo: Navegación inercial.
La navegación autónoma es aquella que no depende de
medidas externas y por tanto no es susceptible a interferencias
(accidentales o provocadas) ni a manipulación o error externo.
El ejemplo más temprano es la navegación a estima que ya se
vio en la introducción histórica. En aviación se emplea la
navegación inercial.
El objeto de la navegación inercial es determinar la posición,
velocidad y actitud de la aeronave, con la mayor precisión
posible, a partir de las medidas de la IMU (Inertial
Measurement Unit).
La IMU se compone de sensores inerciales: giróscopos y
acelerómetros.
Para la navegación inercial, además de la IMU, es necesaria
una estimación inicial (fix) de posición, velocidad y actitud, y
un modelo gravitatorio.
2 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
La IMU: sensores inerciales
Mecanización en ejes n y en ejes e
Alineamiento inicial
Historia de la navegación inercial I
Históricamente la navegación inercial no nace hasta el siglo
XX.
Sus antecedentes se encuentran en la navegación a estima (ya
estudiada) y en la invención de los primeros giróscopos.
Los giróscopos se inventaron en el siglo XIX; fue Leon Focault
quien les dio su nombre, popularizándolo gracias a un
experimento (fracasado) en el que los usó para tratar de
demostrar la rotación de la Tierra.
Un giróscopo mantiene su eje de rotación (en el
espacio inercial) frente a perturbaciones. Este efecto
se conoce como rigidez giroscópica.
Dichas perturbaciones generan un movimiento de
precesión y nutación, que se puede medir.
Por ejemplo, al forzar la rotación de un giróscopo en
un eje distinto a su eje de giro, se produce un efecto
que permite estimar la velocidad de rotación.
3 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
La IMU: sensores inerciales
Mecanización en ejes n y en ejes e
Alineamiento inicial
Historia de la navegación inercial II
Por tanto los giróscopos tienen un eje en torno
al cual giran permanentemente, otro eje en el
cual se detectan perturbaciones y otro eje en el
cual se miden dichas perturbaciones.
Las plataformas giroestabilizadas se basan en
este fenómeno, son plataformas insensibles a
perturbaciones que permiten diversas
aplicaciones, como por ejemplo emplear una
cámara de televisión en un helicóptero.
Otra aplicación del efecto es el girocompás o
brújula giroscópica, que permite encontrar el
Norte geográfico.
Modernamente, se emplean giróscopos no
mecánicos, más sofisticados que emplean
diversos efectos fı́sicos.
4 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
La IMU: sensores inerciales
Mecanización en ejes n y en ejes e
Alineamiento inicial
Historia de la navegación inercial III
En la II Guerra Mundial, se emplearon
giróscopos y acelerómetros por primera vez,
para guiar misiles V-2.
La invención de este sistema de guiado se debe
a un estadounidense, Robert Goddard.
Tras la guerra, hubo un rápido desarrollo. Los
primeros sistemas de navegación inercial
consistı́an en una triada de acelerómetros y
giróscopos montados en una plataforma, capaz
de rotar y orientarse con libertad.
Se diseña la plataforma de manera que siempre
mantenga su orientación respecto a un sistema
de referencia dado (g o n).
Por tanto medimos directamente anNG y Cbn .
Estos sistemas a veces se llaman
5 / 57
semianalı́ticos.
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
La IMU: sensores inerciales
Mecanización en ejes n y en ejes e
Alineamiento inicial
Historia de la navegación inercial IV
Éstos sistemas son funcionales en cualquier sitio de la
Tierra: tierra, aire, océanos, bajo el agua...
Con navegación inercial el submarino USS Nautilus
cruzó bajo el hielo y pasó por el polo Norte en 1958.
Sin embargo es muy costoso, contiene elementos mecánicos
que se desgastan, requiere una perfecta alineación inicial
(lenta), y presenta problemas de bloqueo de los gimbals
(gimbal lock) si se alinean los ejes de rotación.
El sistema inercial más sofisticado que se creó fue el
AIRS-Advanced Inertial Reference Sphere, que consiste en
una esfera hueca con un fluido donde flota otra esfera con
giróscopos y acelerómetros.
Mantiene (mediante inyección de chorros) siempre una referencia
inercial, con lo que se mide aiNG (que se puede integrar
directamente) y Cib . Por esto se llama geométrico o analı́tico.
Su coste era enorme, pero se obtiene una gran precisión, con una
deriva de 10−5 grados por hora (1,15o por año). Se usó en misiles
6 / 57
balı́sticos y en bombarderos.
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
La IMU: sensores inerciales
Mecanización en ejes n y en ejes e
Alineamiento inicial
Historia de la navegación inercial V
En 1956 se patenta la idea del INS “strapdown”, es decir, fijo
(fijado al cuerpo).
En éste caso los sensores inerciales miden las magnitudes en
ejes cuerpo, es decir, ω bb/i y abNG . Éste tipo se sistema INS se
denomina “analı́tico” o de plataforma analı́tica, porque
realmente no existe una plataforma y todo se realiza mediante
cálculo numérico.
Requiere el uso de ordenadores de gran capacidad de cómputo
y de sensores precisos (por las vibraciones). Eso sólo fue
posible a partir de los 70.
Hoy en dı́a es el único que se usa en la práctica.
Además, gracias a la navegación integrada (complementar el
INS con otros sistemas como el GPS) se pueden emplear
sensores de baja calidad, con lo que el coste se ha abaratado
enormemente.
7 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
La IMU: sensores inerciales
Mecanización en ejes n y en ejes e
Alineamiento inicial
La IMU: sensores inerciales.
Una IMU consta de giróscopos y acelerómetros. Estos
dispositivos han sido estudiados en otras asignaturas.
Un modelo tı́pico de medida serı́a: m̂ = (1 + σ)m + b + ξ,
donde m̂ es la medida obtenida del valor real m, σ es el factor
de escala, b es el sesgo y ξ es ruido de medida. Estos valores
se pueden calibrar pero están sujetos a variaciones.
Las principales caracterı́sticas de estos dispositivos son:
Ancho de banda: determina la frecuencia máxima de
aceleración o giro que son capaces de detectar. Se asimila a la
“velocidad” máxima con la que se toman medidas.
Rango de medición.
Supervivencia a choques.
√
Ruido (en unidades de medida por Hz). Mide ξ. Se puede
usar para calcular como se degrada la medida acumulada.
Inestabilidad del sesgo (en unidades de medida). Mide el ruido
aleatorio que entra en b.
Inestabilidad del factor de escala (en porcentaje). Mide el ruido
aleatorio que entra en σ.
8 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
La IMU: sensores inerciales
Mecanización en ejes n y en ejes e
Alineamiento inicial
Acelerómetros.
Precisiones tı́picas de acelerómetros:
9 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
La IMU: sensores inerciales
Mecanización en ejes n y en ejes e
Alineamiento inicial
Giróscopos
Precisiones tı́picas de giróscopos (RLG=Ring Laser Gyro,
FOG=Fibre Optic Gyro, MEMS=Micro-Electro-Mechanical
Systems).
10 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
La IMU: sensores inerciales
Mecanización en ejes n y en ejes e
Alineamiento inicial
Los acelerómetros y la gravedad I
Un acelerómetro no puede medir g .
Principio de funcionamiento de un acelerómetro: medir el
desplazamiento de una masa testigo. Ejemplo con muelle:
Se cumple que mẍ = F − kx, donde k es la constante del
muelle y F la fuerza en la dirección del eje. Puesto que
F = ma, donde a es la aceleración en la dirección del eje, se
tiene que a = k/m · x + ẍ.
Suponiendo que a es aproximadamente constante, x tiende a
una posición de equilibrio que cumple a = k/m · x, y por
tanto a es proporcional a x.
Otros acelerómetros más sofisticados no requieren esperar a
que se llegue al estado de equilibrio, por ejemplo compensando
F con una fuerza contraria para que nunca se desplace x.
11 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
La IMU: sensores inerciales
Mecanización en ejes n y en ejes e
Alineamiento inicial
Los acelerómetros y la gravedad II
¿Qué sucede si el eje está en la misma dirección de la
gravedad?
Supongamos que el objeto está en caı́da libre. Para aplicar la
Ley de Newton tenemos que estar en un sistema de referencia
inercial, pero puesto que el objeto está en caı́da libre, tenemos
que tener en cuenta que el sistema de referencia fijo en el
cuerpo es no inercial!
Por tanto: m(ẍ − g ) = F − kx. Por otro lado
F = m(aNG − g ). Por tanto, en el equilibrio: aNG = k/m · x.
12 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
La IMU: sensores inerciales
Mecanización en ejes n y en ejes e
Alineamiento inicial
Los acelerómetros y la gravedad III
¿Es cierto pues que un acelerómetro no puede medir la
gravedad?
Es cierto que un acelerómetro no puede medir g directamente.
En estado de caı́da libre en cualquier punto de la atmósfera (o
en la Luna) sentirı́a la misma aceleración: cero.
Sin embargo, en reposo sobre la superficie de la Tierra (por
ejemplo un acelerómetro sobre una mesa), existe una fuerza
de reacción R = −g , es decir, R = g (apunta “hacia arriba”).
Por tanto aNG = g y se tiene g = k/m · x. Es por tanto una
medida “indirecta” de la gravedad.
La definición correcta de acelerómetro es “un dispositivo que
mide desviaciones del estado de caı́da libre”.
Obsérvese que la aceleración debida al geopotencial
(añadiendo la rotación de la Tierra) tiene exactamente el
mismo carácter que la gravitatoria y por tanto no se puede
medir (directamente).
13 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
La IMU: sensores inerciales
Mecanización en ejes n y en ejes e
Alineamiento inicial
Mecanización en ejes n I
En este tema supondremos, para simplificar, que n = g , y que
la Tierra es esférica.
Mecanizar las ecuaciones quiere decir escribirlas en el sistema
de referencia apropiado y de forma que se puedan calcular a
partir de las entradas.
Partimos de las ecuaciones
fundamentales
de la navegación:
d n
dt v
ω nn/e
×
=−
Actitud: C˙nb = − ω bb/n
Posición:
Velocidad:
+
2ω ne/i
×
v n + anNG + g n
Cnb
φ̇
=
λ̇
=
ḣ
=
vN
Re + h
vE
cφ(Re + h)
−vD
Donde sabemos además que: ω ne/i = [ωE cφ 0 − ωE sφ]T y
E
ω nn/e = [ Rev+h
−
vN
Re +h
−
vE tan φ T
Re +h ] .
14 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
La IMU: sensores inerciales
Mecanización en ejes n y en ejes e
Alineamiento inicial
Mecanización en ejes n II
También disponemos de un modelo de gravedad:
e
g n ' [0 0 g (h)]T , donde g (h) = (Reµ+h)
2.
Además nuestra IMU nos proporcionará las medidas de los
sensores inerciales: abNG y ω bb/i . Obsérvese que éstas no son las
magnitudes que aparecen en las ecuaciones fundamentales de
la navegación: necesitamos anNG y ω bb/n .
Se tiene que anNG = Cbn abNG = (Cnb )T abNG .
Y se tiene que
b = ωb − C b ωn + ωn
ω bb/n = ω bb/i − ω be/i − ωn/e
n
b/i
e/i
n/e .
Recordemos
que por
tanto:
ω bb/n
×
ω bb/i
×
=−
Actitud: C˙nb = − ω bb/i
Velocidad:
ω ne/i
ω nn/e
×
ω nn/e
×
=
−
+
(Cnb )T
Por tanto las ecuaciones fundamentales de la navegación de
velocidad y actitud se modifican:
d n
dt v
Cnb
×
v n + (Cnb )T abNG + g n
×
Cnb + Cnb ω ne/i + ω nn/e
+
2ω ne/i
15 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
La IMU: sensores inerciales
Mecanización en ejes n y en ejes e
Alineamiento inicial
Mecanización en ejes n III
Ya disponemos pues de todo lo que necesitamos y podemos
esquematizarlo en el siguiente diagrama de bloques:
Calculo
velocidad
vn
|
(Á;¸;h)
Calculo
posicion
a bNG
|
IMU
! bb=i
|
Cbn
gn
|
Modelo
gravitatorio
Calculo
Actitud
! nn=e; ! ne=i
| |
Calculo de
vel. angulares
16 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
La IMU: sensores inerciales
Mecanización en ejes n y en ejes e
Alineamiento inicial
Mecanización en ejes e
En ocasiones, por motivos de integración INS-GPS, conviene
mecanizar las ecuaciones en los ejes e (en los que trabaja el
GPS).
Se llega a las siguientes ecuaciones para velocidad y posición:
×
d e
v = −2 ω ee/i
v e + aeNG + g e =
Velocidad: dt
×
−2 ω ee/i
v e + (Cen )T (Cnb )T abNG + g e
Posición:
d e
dt r
= ve.
Habrı́a que escribir Cen en función de r e y v e , escribir un
modelo de g e , y escribir la ecuación de la actitud, y se llegarı́a
a un esquema similar al anterior.
17 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
La IMU: sensores inerciales
Mecanización en ejes n y en ejes e
Alineamiento inicial
Alineamiento inicial I
Supongamos que tenemos el avión en reposo en un
aeropuerto, y es necesario inicializar el INS con un “fix”.
¿Cómo se harı́a?
Evidentemente, se tiene que φ, λ y h son las del aeropuerto, o
incluso con mayor precisión, las tomadas de un sistema GPS.
Puesto el avión está en reposo, v n = 0.
Queda encontrar el valor inicial de actitud, es decir,
Cnb (t = 0). Para ello se usa la medida obtenida de giróscopos
y acelerómetros (en reposo).
De la ecuación
fundamental
de la navegación se tiene:
×
n
n
0 = − ω n/e + 2ω e/i
0 + anNG + g n ,
por tanto abNG = Cnb anNG = −Cnb g n .
Por otro lado es claro que ω bb/n = ω bb/i
evidentemente ω bb/n = 0 y ω bn/e = 0.
n .
Por tanto:ω bb/i = ω be/i = Cnb ωe/i
luego anNG = −g n y
− ω be/i − ω bn/e y
18 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
La IMU: sensores inerciales
Mecanización en ejes n y en ejes e
Alineamiento inicial
Alineamiento inicial II
Tenemos por tanto dos ecuaciones: abNG = −Cnb g n y
n . Llamando a las medidas x b = ab
ω bb/i = Cnb ωe/i
1
NG y
b , y denotando los modelos como y n = −g n y
x b2 = ωb/i
1
n
n
x 2 = ωe/i , se tiene que
x n1 = Cnb (0)y b1 ,
x n2 = Cnb (0)y b2
Tendrı́amos 6 medidas (las componentes de dos vectores) para
9 grados de libertad (las entradas de la matriz).
Es necesario pues “generar” una medida adicional
independiente.
19 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
La IMU: sensores inerciales
Mecanización en ejes n y en ejes e
Alineamiento inicial
Alineamiento inicial III
Llamemos x 3 = x 1 × x 2 . Obsérvese que este vector se puede
× b
b
escribir como x 1 x 2 en el sistema de referencia b, donde X
es la matriz antisimétrica que representa elproducto
vectorial.
×
×
b
b
n
Por otro lado se tiene que x 1 = Cn (0) y 1 Cbn (0). Por
×
×
tanto x b3 = x b1 x b2 = Cnb (0) y n1 Cbn (0)Cnb (0)y n2 =
×
Cnb (0) y n1 y n2 . Por tanto denotando y 3 = y 1 × y 2 , se tiene
que x b3 = Cnb (0)y n3 .
Escribiendo la matriz A como la matriz cuyas columnas son
x b1 , x b2 y x b3 , y la matriz B como la matriz cuyas columnas son
y n1 , y n2 y y n3 , se tiene: A = Cnb (0)B y por tanto Cnb (0) = AB −1 .
No se han tenido en cuenta los errores de medida: Cnb (0)
probablemente no saldrı́a ortonormal (habrı́a que emplear un
algoritmo más sofisticado que tuviera en cuenta los errores de
medida).
20 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
Variables de error. Error en actitud
Modelo de propagación linealizado
El canal vertical
Errores en navegación inercial.
Si conociéramos con total precisión las condiciones iniciales, el
modelo de gravedad fuera perfecto, y los sensores inerciales no
cometieran errores de medida, entonces la navegación inercial
serı́a totalmente exacta.
No obstante, ésto no es ası́, y cada uno de los términos
mencionados contiene errores.
Errores en condiciones iniciales.
Errores en el modelo de gravedad δg n .
Errores en los sensores inerciales. Para simplificar los
agruparemos en un único valor: δabNG , δω bb/i .
La navegación inercial realiza integración de ecuaciones
diferenciales, luego éstos errores se van acumulando.
Es importante tener un modelo del error para saber como
crece, para cuantificarlo, para aplicar medidas que permitan
disminuirlo (como integración con otros sensores), para
descubrir que sensores son más crı́ticos (análisis de
sensibilidad), etc...
21 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
Variables de error. Error en actitud
Modelo de propagación linealizado
El canal vertical
Variables de error.
En general, para una variable cualquiera de navegación x, se
denota con x̂ el valor estimado con el INS.
Puesto que este valor no será exacto se define el error como
δx = x − x̂.
Error en posición: las variables de posición son φ, λ y h. Las
variables estimadas serán φ̂, λ̂, ĥ. Definimos el error en
posición δp como δp = [δφ δλ δh]T = [φ − φ̂ λ − λ̂ h − ĥ]T .
Error en velocidad: igualmente se define δv n = v n − v̂ n , donde
v̂ n es la velocidad calculada por el INS.
Para la actitud, ¿cómo definir un error en la matriz de actitud
δCnb ? No serı́a correcto considerar una matriz de nueve
coeficientes pequeños ya que no necesariamente serı́a una
matriz de actitud.
En su lugar, supongamos que el INS estima una actitud de los
ejes cuerpo b que, al no ser exactamente la real, denotaremos
por b̂.
22 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
Variables de error. Error en actitud
Modelo de propagación linealizado
El canal vertical
Error de actitud.
Por tanto, realmente Ĉnb = Cnb̂ , donde se tiene que:
(ψ̂,θ̂,ϕ̂)
δφx
δφy
δφz
xb
y S1
z S2
n −→ b̂ −→ S1 −→ S2 −→ b
Se tiene entonces Cnb = Cb̂b Cnb̂ , por analogı́a con las
definiciones anteriores definimos
δCnb = Cnb − Ĉnb = Cb̂b Ĉnb − Ĉnb = (Cb̂b − Id)Ĉnb .
Suponiendo que los errores δφ = [δφx δφy δφz ]T son
pequeños, se vio que Cbb̂ = Id − δφ× , donde como siempre:
0
−δφz δφy
0
δφx
δφ× = δφz
−δφy δφx
0
Por tanto, la ecuación que define la “matriz de error” δCnb es
δCnb = (Id − δφ× − Id)Ĉnb = −δφ× Ĉnb .Y se tiene
Cnb = (Id − δφ× )Ĉnb .
23 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
Variables de error. Error en actitud
Modelo de propagación linealizado
El canal vertical
Ecuaciones de propagación del error
Se quiere estudiar como evoluciona el error del INS con el
tiempo. Para ello, es necesario encontrar el modelo de
propagación del error.
Éste modelo se encuentra directamente de las ecuaciones de
la navegación inercial, suponiendo que los errores son
pequeños, con lo que las ecuaciones se pueden linealizar.
Por ejemplo, supongamos que x es una variable que el INS
estima como x̂. La ecuación que verifica x será ẋ = f (x). El
INS lo que hará será calcular x̂ a partir de x̂˙ = f (x̂). Por
tanto: δ ẋ = ẋ − x̂˙ = f (x) − f (x̂) = f (x̂ + δx) − f (x̂).
Desarrollando esta expresión en serie de Taylor y quedándonos
∂f
el término constante y el lineal: f (x̂ + δx) ' f (x̂) + ∂x
|x=x̂ δx.
Por tanto llegamos a la siguiente expresión: δ ẋ =
que es aproximada y sólo sirve para δx pequeño.
∂f
∂x |x=x̂ δx,
24 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
Variables de error. Error en actitud
Modelo de propagación linealizado
El canal vertical
Propagación del error en posición I
Se tiene que las ecuaciones de la posición son:
φ̇
=
λ̇
=
ḣ
=
vN
Re + h
vE
cφ(Re + h)
−vD
Por tanto el INS calculará:
˙
φ̂
=
˙
λ̂
=
˙
ĥ
=
v̂N
Re + ĥ
v̂E
cφ̂(Re + ĥ)
−v̂D
Aplicando la teorı́a antes desarrollada, por ejemplo, para h:
δ̇h = ḣ − ĥ˙ = −vD + v̂D = −δvD . Como la ecuación ya era
lineal no hubo que linealizar.
25 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
Variables de error. Error en actitud
Modelo de propagación linealizado
El canal vertical
Propagación del error en posición II
Para la latitud: δ φ̇ = φ̇ − φ̂˙ =
vN
Re +h
−
v̂N
Re +ĥ
=
v̂N +δvN
Re +ĥ+δh
−
v̂N
.
Re +ĥ
Desarrollando en serie de Taylor y quedándonos hasta el
término lineal: v̂N +δvN = v̂N + 1 δvN − v̂N 2 δh
Por tanto: δ φ̇
Re +ĥ+δh
Re +ĥ
Re +ĥ
= R 1+ĥ δvN − (R v̂+Nĥ)2 δh.
e
e
(Re +ĥ)
Operando igualmente con la longitud:
E tan φ̂
δ λ̇ = cφ̂(R1 +ĥ) δvE − cφ̂(Rv̂E+ĥ)2 δh + cv̂φ̂(R
δφ
+ĥ)
e
e
e
Poniéndolo todo en una matriz:
δφ
d
δλ
δ ṗ =
=
dt
δh
0
0
v̂E tan φ̂
cφ̂(Re +ĥ)
0
0
0
v̂N
−
(Re +ĥ)2
v̂E
−
cφ̂(Re +ĥ)2
1
Re +ĥ
0
0
0
1
cφ̂(Re +ĥ)
0
0
0
0
−1
δφ
δλ
δh
δvN
δvE
δvD
26 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
Variables de error. Error en actitud
Modelo de propagación linealizado
El canal vertical
Propagación del error en posición III
El resultado se puede escribir abreviadamente como
δ ṗ = Cpp δp + Cpv δv n , donde:
v̂N
0
0 −
(Re +ĥ)2
v̂E tan φ̂
v̂E
Cpp =
cφ̂(Re +ĥ) 0 − cφ̂(Re +ĥ)2 ,
0
0
0
1
0
0
Re +ĥ
1
0
Cpv = 0
cφ̂(R +ĥ)
e
0
0
−1
27 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
Variables de error. Error en actitud
Modelo de propagación linealizado
El canal vertical
Errores en velocidad angular
Para repetir el procedimiento con las ecuaciones de velocidad
y actitud necesitamos antes encontrar el error en ω ne/i y en
ω nn/e que denotaremos como δω ne/i y δω nn/e .
En primer lugar se tiene que:
ωE cφ̂
−ωE sφ̂
→ δω n =
δφ
0
0
ω̂ ne/i =
e/i
−ωE sφ̂
−ωE cφ̂
v̂
E
Por otro lado: ω̂ nn/e
ĥ
Re +
v̂
N
−
=
Re +ĥ , por tanto:
φ̂
− v̂ER tan
+ĥ
e
δω nn/e
=
1
δvE − v̂E 2 δh
Re +ĥ
(Re +ĥ)
− 1 δvN + v̂N 2 δh
Re +ĥ
(Re +ĥ)
v̂E (1+tan2 φ̂)
1 tan φ̂
v̂E tan φ̂
−
δvE +
δh −
δφ
Re +ĥ
(Re +ĥ)2
Re +ĥ
28 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
Variables de error. Error en actitud
Modelo de propagación linealizado
El canal vertical
Propagación del error en velocidad I
Las ecuaciones
de la velocidad
que calcula el INS serán:
×
n
n
n
d n
b )T âb + ĝ n
v̂
=
−
ω̂
v̂
+
(
Ĉ
+
2ω̂
n
NG
n/e
e/i
dt
Por tanto las ecuaciones del error serán:
×
×
d n
δv = − δω nn/e + 2δω ne/i
v̂ n − ω̂ nn/e + 2ω̂ ne/i
δv n
dt
+(δCnb )T âbNG + (Ĉnb )T δabNG + δg n
Recordemos que δCnb = −δφ× Ĉnb . Los otros términos los
hemos calculado, excepto δabNG (el error en los acelerómetros)
y δg n (el error en el modelo gravitatorio).
Puesto que
0
0
→ δg n =
0
0
gn '
δh + δG n , donde
2µe
µe
−
2
(Re +h)
(R +ĥ)3
n
e
δG son errores en el modelado gravitatorio.
29 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
Variables de error. Error en actitud
Modelo de propagación linealizado
El canal vertical
Propagación del error en velocidad II
Por tanto podremos escribir, como en el caso de la posición,
δ v̇ n = Cvp δp + Cvv δv n + Cv φ δφ + Ca δabNG + δG n .
Es una ecuación lineal en los errores, donde las matrices están
definidas en función de la estimación del INS, y con dos
términos forzantes: el error en los acelerómetros δabNG y el
error en el modelo gravitatorio δG n .
30 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
Variables de error. Error en actitud
Modelo de propagación linealizado
El canal vertical
Propagación del error en actitud I
Finalmente, calculamos el error en actitud. Recordemos el
diagrama considerando una actitud estimada intermedia b̂:
(ψ̂,θ̂,ϕ̂)
δφx
δφy
δφz
n −→ b̂ −→ S1 −→ S2 −→ b
xb
y S1
z S2
×
La actitud real verifica Ċnb = − ω bb/n Cnb y la actitud
×
estimada verifica Ĉ˙ nb = Ċnb̂ = − ω b̂b̂/n Ĉnb . Por tanto
ω̂ bb/n = ω b̂b̂/n . ¿Cuál es la definición entonces de δω bb/n ?
Tenemos que definir el error como la realidad menos la
estimación: δω bb/n = ω bb/n − ω b̂b̂/n . Pero son dos vectores que
no están en la misma base!! (sı́ en una base muy parecida).
Descomponemos ω bb/n = ω bb/b̂ + ω bb̂/n y escribimos
b̂
×
b
b
b̂
ω b̂/n = Cb̂ ω b̂/n = Id − δφ ω b̂/n , llegando a:
b̂
×
b
b
δω b/n = ω b/b̂ + Id − δφ ω b̂/n − ω bb̂/n = ω bb/b̂ − δφ× ω b̂b̂/n .
31 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
Variables de error. Error en actitud
Modelo de propagación linealizado
El canal vertical
Propagación del error en actitud II
Puesto que los ángulos son muy pequeños, se tiene
δ φ̇ = ω bb/b̂ . Por tanto llegamos a δω bb/n = δ φ̇ − δφ× ω̂ bb/n .
Por tanto finalmente la ecuación del error de actitud δ φ̇ queda
como δ φ̇ = δω bb/n + δφ× ω̂ bb/n .
Para finalizar hay que expresar todo en función de la velocidad
angular b/i, que es la que mideel giróscopo. En primer lugar,
ω̂ bb/n = ω̂ bb/i − Ĉnb ω̂ ne/i + ω̂ nn/e . Tomando error en esta
ecuación:
δω bb/n = δω bb/i − δCnb ω̂ ne/i + ω̂ nn/e − Ĉnb δω ne/i + δω nn/e .
Por tanto la ecuación del error de actitud δ φ̇ queda:
δ φ̇ = δω bb/i + δφ× Ĉnb ω̂ ne/i + ω̂ nn/e − Ĉnb δω ne/i + δω nn/e
+δφ× ω̂ bb/i − δφ× Ĉnb ω̂ ne/i + ω̂ nn/e
= δω bb/i − Ĉnb δω ne/i + δω nn/e + δφ× ω̂ bb/i
32 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
Variables de error. Error en actitud
Modelo de propagación linealizado
El canal vertical
Propagación del error del INS.
Por tanto podremos escribir, como antes,
δ φ̇ = Cφp δp + Cφv δv n + Cφφ δφ + δω bb/i .
Es una ecuación lineal en los errores, donde las matrices están
definidas en función de la estimación del INS, y con un
términos forzante: el error en los giróscopos δω bb/i .
Si ponemos todos los errores juntos, llegamos a:
0
δp
δp
Cpp Cpv
0
d
δv n = Cvp Cvv Cv φ δv n + Ca δabNG + δG n
dt
δω bb/i
δφ
Cφp Cφv Cφφ
δφ
Además
estarán los errores en condiciones iniciales:
δp
δv n (t = 0).
δφ
Éste es el modelo de propagación del error del INS. Puesto
que el término forzante es desconocido (y se modela mediante
la estadı́stica) es una ecuación diferencial estocástica.
33 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
Variables de error. Error en actitud
Modelo de propagación linealizado
El canal vertical
Ecuación del error en el canal vertical I
Si trabajamos sólo con el error en h y VD , y despreciamos
todos los términos excepto el gravitatorio, llegamos a la
siguiente ecuación:
δ ḣ = −δVD
δ V̇D
' −2
µe
(Re +
ĥ)3
δh.
Por otro lado podemos aproximar en el denominador
Re + ĥ ' Re . Teniendo en cuenta que la aceleración de la
gravedad al nivel del mar g0 = Rµe2 , tendrı́amos las ecuaciones:
e
δ ḣ = −δVD
2g0
δ V̇D ' −
δh.
Re
Escribiéndolo como una única ecuación para δh: δ ḧ =
2g0
Re δh.
34 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
Variables de error. Error en actitud
Modelo de propagación linealizado
El canal vertical
Ecuación del error en el canal vertical II
La solución
q de la ecuación
q diferencial es:
2g0
t
Re
−
2g0
t
Re
δh = C1 e
+ C2 e
, donde las constantes son función
de las condiciones iniciales de altura y velocidad vertical.
Éstas ecuaciones son inestables! El primer término crece hasta
el infinito.
Fı́sicamente, lo que sucede es lo siguiente: si hay un error de
altitud, p.ej. el INS piensa que el avión está más alto de lo
que realmente está, el modelo de gravedad predice que la
gravedad es menor de lo que es, con lo que el INS predice que
el avión se eleva, es decir, el error inicial se amplifica!
Éste resultado se mantiene si no se desprecian los términos
que no se han considerado. Por tanto el canal vertical del INS
es inestable y no se puede usar por sı́ sólo; empleando otras
medidas (p.ej. barométricas) es posible compensar el canal
vertical y obtener una medida fiable de la altura.
35 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
Breve recordatorio de estadı́stica
Procesos estocásticos. Ruido blanco. Propagación.
Medidas del error.
Fuentes de Error
Hemos visto que las ecuaciones de propagación del error son
del tipo δ ẋ = A(x̂)δx + δ, donde δx son las variables de
navegación (posición, velocidad, actitud) y los δ las fuentes
de error. Estas fuentes son:
Errores en el modelo de gravedad δg n .
Errores en los sensores inerciales δabNG , δω bb/i .
Aparte está el error en las condiciones iniciales δx(t0 ).
Si discretizamos estas ecuaciones en el tiempo, podrı́amos
escribir un modelo algo más sencillo:
δx(tk+1 ) = A(tk )δx(tk ) + δ(tk ).
¿Cómo se modelan los errores? ¿Cómo se interpretan las
ecuaciones que contienen errores?
Para responder a estas preguntas es necesario recordar
algunos conceptos estadı́sticos.
36 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
Breve recordatorio de estadı́stica
Procesos estocásticos. Ruido blanco. Propagación.
Medidas del error.
Descripción estadı́stica del error
Consideremos por ejemplo el caso del error de medida de un
acelerómetro: abNG = âbNG + δabNG , donde δabNG son errores de
medida.
Una componente de δabNG , por ejemplo δax , puede tener el
siguiente aspecto:
Es imposible conocer el valor con exactitud.
Se observa que cambia con el tiempo.
Por tanto, se representan sus propiedades usando la
estadı́stica.
37 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
Breve recordatorio de estadı́stica
Procesos estocásticos. Ruido blanco. Propagación.
Medidas del error.
Variables aleatorias continuas unidimensionales
Sea una variable aleatoria X ∈ R continua.
Recordemos que la función de distribución F (x) es la
probabilidad de que X ≤ x, que se escribe como
F (x) = P(X ≤ x).
La función de distribución
R x se calcula mediante la función de
densidad f (x): F (x) = −∞ f (y )dy .
Se define el operador esperanzaRmatemática actuando sobre la
∞
función g (x) como E [g (X )] = −∞ g (y )f (y )dy . Se trata de
un operador lineal, de forma que
E [α1 g1 (X ) + α2 g2 (X )] = α1 E [g1 (X )] + α2 E [g2 (X )]. Los dos
casos importantes son:
R∞
Media: m(X ) = E [X ] = −∞ yf (y )dy .
Varianza: V (X ) = E [(X − m(X ))2 ] = E [X 2 ] − (E [X ])2 .
Desviación
tı́pica σ, la raı́z cuadrada de la varianza,
p
σ = V (X ).
38 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
Breve recordatorio de estadı́stica
Procesos estocásticos. Ruido blanco. Propagación.
Medidas del error.
Distribución normal o gaussiana I
Es la distribución más usada en estadı́stica. Se escribe
X ∼ N(m, σ 2 ) y su
función2 de densidad es
f (x) = σ√12π Exp − (x−m)
.
2σ 2
Intervalos de confianza: si X ∼ N(m, σ 2 ):
Intervalo 1-σ: P(X ∈ [m − σ, m + σ]) = 68,3 %.
Intervalo 2-σ: P(X ∈ [m − 2σ, m + 2σ]) = 95,45 %.
Intervalo 3-σ: P(X ∈ [m − 3σ, m + 3σ]) = 99,74 %.
39 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
Breve recordatorio de estadı́stica
Procesos estocásticos. Ruido blanco. Propagación.
Medidas del error.
Distribución normal o gaussiana II
El teorema central del lı́mite dice que la suma de variables
aleatorias (con cualquier tipo de distribución) tiende en media
a la normal. Puesto que los errores a gran escala provienen de
la suma y acumulación de muchos errores a pequeña escala,
esto justifica el uso de la normal como modelo para errores.
Una propiedad importante de la normal es que la suma de
normales es de nuevo normal, es decir, si X ∼ N(mx , σx2 ) e
Y ∼ N(my , σy2 ) y son independientes, entonces si Z = X + Y
se tiene que Z ∼ N(mx + my , σx2 + σy2 ).
q
Por tanto σz = σx2 + σy2 , es decir, la desviación tı́pica de la
suma de errores es la raı́z cuadrada de la suma de los
cuadrados de las desviaciones tı́picas de los errores.
Esta regla, conocida como Root-Sum-of-Squares (RSS) es
muy importante.
40 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
Breve recordatorio de estadı́stica
Procesos estocásticos. Ruido blanco. Propagación.
Medidas del error.
Variables aleatorias continuas multidimensionales
Sea una variable aleatoria X ∈ Rn continua multidimensional.
Cada componente de X sigue una distribución unidimensional.
Como en el caso unidimensional, se define una función de
distribución conjunta, que se calcula mediante la función de
densidad f (x).
R
Igualmente E [g (X )] = Rn g (y )f (y )dy . Los dos casos
importantes son:
R
Media: m(X ) = E [X ] = Rn y f (y )dy .
Matriz de covarianzas:
Cov (X ) = E [(X − m(X ))(X − m(X ))T ] = Σ. Es una matriz
simétrica y definida positiva. Los valores de la diagonal
representan la varianza de cada componente de X , mientras
que los valores fuera de la diagonal la correlación entre dos
componentes de X . Se tiene Σ = E [(X X T ] − m(X )m(X )T .
Por ejemplo, para n = 3 y escribiendo X = [X , Y , Z ]:
σx2
Σ = E [(X − mx )(Y − my )]
E [(X − mx )(Z − mz )]
E [(X − mx )(Y − my )]
σy2
E [(Y − my )(Z − mz )]
E [(X − mx )(Z − mz )]
E [(Y − my )(Z − mz )]
σz2
41 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
Breve recordatorio de estadı́stica
Procesos estocásticos. Ruido blanco. Propagación.
Medidas del error.
Distribución normal multivariante I
Se escribe X ∼ Nn (m, Σ) y su función de densidades
1
1
T −1 (x − m) .
f (x) = Det(Σ)(2π)
n/2 Exp − 2 (x − m) Σ
Los intervalos de confianza son ahora regiones de Rn ,
definidos por P(X ∈ Ω) = PΩ .
La forma de estas regiones de confianza es de elipsoides,
descritos por la ecuación (x − m)T Σ−1 (x − m) = d 2 , donde d
depende de PΩ . Cuanto mayores sean los valores de los
autovalores de Σ, mayor será el elipsoide. Las direcciones de
los ejes del elipsoide vendrán dados por los autovectores de Σ.
42 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
Breve recordatorio de estadı́stica
Procesos estocásticos. Ruido blanco. Propagación.
Medidas del error.
Distribución normal multivariante II
Si por ejemplo describimos el error en posición en ejes cuerpo,
δr b = [δx δy δz]T , como una normal multivariante con n = 3,
de media cero (centrada en el avión) y con matriz de
covarianzas:
2
Σ=
σx
0
0
0
σy2
0
0
0
σz2
Entonces σx representa la magnitud del error ATE
(along-track error), σy del error XTE (cross-track error) y σz
del error VE (vertical error) y podemos asimilar el movimiento
del avión al movimiento del elipsoide, que representa una
región de incertidumbre donde se puede encontrar el avión con
gran probabilidad.
Se verifica que si X ∼ Nn (mx , Σx ) e Y ∼ Nn (my , Σy ) y son
independientes, entonces si Z = X + Y resulta
Z ∼ Nn (mx + my , Σx + Σy ).
Igualmente AX + b donde A y b son no-aleatorios verifica que
AX + b ∼ Nn (Amx + b, AΣx AT ).
43 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
Breve recordatorio de estadı́stica
Procesos estocásticos. Ruido blanco. Propagación.
Medidas del error.
Procesos estocásticos.
Un proceso estocástico o variable estocástica no es sino una
variable aleatoria X (t) que cambia con el tiempo. Los errores
de navegación serán este tipo de variables.
Por tanto la media y la covarianza también varı́an con el
tiempo: m(t), Σ(t).
Para un proceso, se define la autocorrelación como
R(t, τ ) = E [X (t)X (τ )T ]. La autocorrelación permite conocer
hasta que punto la historia pasada de X influye en su valor
actual.
Proceso gaussiano: Un proceso gaussiano verifica
X (t) ∼ Nn (m(t), Σ(t)), es decir, se distribuye como una
normal multivariante cuya media y covarianza varı́an con el
tiempo.
44 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
Breve recordatorio de estadı́stica
Procesos estocásticos. Ruido blanco. Propagación.
Medidas del error.
Ruido blanco.
Ruido blanco: Se define como ruido blanco un proceso ν(t)
que verifica:
E [ν(t)] = 0.
E [ν(t)ν(t)T ] = σ 2 Id.
R(t, τ ) = E [ν(t)ν(τ )T ] = δ(t − τ )σ 2 Id, donde δ(x) vale 1 si
x = 0 y 0 en cualquier otro caso.
La última condición quiere decir que el valor del ruido blanco
en un instante es independiente de su valor en cualquier
instante anterior.
Ruido blanco gaussiano: Es un proceso que cumple las
condiciones anteriores, y además es gaussiano.
Un buen modelo para las fuentes de error (errores de medida,
errores gravitatorios) es δ(tk ) = b + Dν, donde ν es ruido
blanco gaussiano. El valor de b dará la media del error (sesgo,
llamado bias en inglés).
45 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
Breve recordatorio de estadı́stica
Procesos estocásticos. Ruido blanco. Propagación.
Medidas del error.
Propagación del error.
Si en las ecuaciones de propagación del error
δx(tk+1 ) = A(k)δx(tk ) + δ(tk ) sustituimos δ(tk ) = b + Dν,
obtenemos el siguiente modelo de propagación del error:
δx(tk+1 ) = A(k)δx(tk ) + b + Dν.
Observación: tı́picamente b también está sometido a un error
variable, de forma que b(tk+1 ) = b(tk ) + Db ν b . Para
simplificar ignoramos esta variación.
Se realizan las siguientes hipótesis:
ν es ruido blanco gaussiano con varianza σν2 .
Inicialmente, δx(t0 ) ∼ Nn (m0 , Σ0 ). Si se conocieran
perfectamente, entonces Σ0 = 0.
Además se tiene la hipótesis de que δx(t0 ) y ν son
independientes.
Bajo estas condiciones, se tiene que δx(tk ) es un proceso
gaussiano, es decir, δx(tk ) ∼ Nn (mk , Σk ), donde la media y la
covarianza verifican la siguiente evolución:
Propagación de la media: mk+1 = Amk + b.
Propagación de la covarianza: Σk+1 = AΣk AT + σν2 DD T .
46 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
Breve recordatorio de estadı́stica
Procesos estocásticos. Ruido blanco. Propagación.
Medidas del error.
Propagación del error: ejemplo sencillo
Supongamos que tuviéramos una ecuación de propagación del
error en una dimensión (por ejemplo la posición en el eje x)
dada simplemente por: δxk+1 = δxk + ν, donde:
La variable temporal k representa minutos, es decir, x6 es el
error en posición pasados 6 minutos.
ν es ruido blanco gaussiano de varianza σν2 .
Inicialmente, δx(t0 ) = 0.
Además δx(tk ) y ν son independientes.
Entonces aplicando las fórmulas anteriores,
δx(tk ) ∼ N(mk , σk ), donde la media y la varianza verifican:
Propagación de la media: mk+1 = mk . Como m0 = 0, se
tendrá mk = 0 para todo k.
2
2
Propagación de la varianza: σk+1
= σk2 + σnu
. Como σ02 = 0, se
√
2
2
tiene que σk = kσnu . Por tanto la varianza verifica σk = kσν .
Si por ejemplo x son metros y el ruido blanco tiene σν = 0,1
metros, entonces aunque inicialmente
√ la posición se conoce
sin error, pasada una hora σ60 = 60 · 0,1 = 0,77, es decir un
intervalo 2-σ serı́a δx ∈ [−1,55, 1,55].
47 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
Breve recordatorio de estadı́stica
Procesos estocásticos. Ruido blanco. Propagación.
Medidas del error.
Propagación del error para un giróscopo
Si estuviéramos estimando un giro unidimensional de un
ángulo, θ, a partir de la medida de su velocidad angular por
un giróscopo, ω, se tiene: θ̇ = ω.
Discretizando esta ecuación obtenemos aproximadamente
θk+1 = θk + ∆T ω, donde ∆T es el periodo de muestreo.
El error verificará δθk+1 = δθk + ∆T δω y suponiendo que δω
es ruido blanco de varianza σν2 , se tiene, como antes:
Var[δθk ] = k(∆T )2 σν2 ,
y observando que k∆T = t es el tiempo transcurrido:
p
√ √
σθk = Var[δθk ] = t
∆T σν .
En las especificaciones
de un giróscopo suele venir el dato
√
√
ARW= ∆T σν , en unidades de grados/ tiempo. Para
estimar la desviación tı́pica
del error en un tiempo t basta
√
multiplicar ARW por t. Existen otros errores que habrı́a
también que añadir.
48 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
Breve recordatorio de estadı́stica
Procesos estocásticos. Ruido blanco. Propagación.
Medidas del error.
Propagación del error para un acelerómetro I
Para un desplazamiento unidimensional se tiene igualmente,
para la velocidad, v̇ = a y para la posición, ẋ = v .
Esto implica el siguiente sistema de ecuaciones para el error:
d
dt
δv
δx
=
0
1
0
0
δv
δx
+
δa
0
Discretizando en el tiempo:
d
dt
δvk+1
δxk+1
=
∆T
1
0
∆T
δvk
δxk
+
1
0
δak
Por tanto, usando las ecuaciones de
y bajo las
propagación
δvk
hipótesis habituales, tenemos que
∼ N2 (mk , Σk ) y
δxk
suponiendo que δa es ruido blanco de varianza σa2 , se tienen
las siguientes ecuaciones para mk y Σk :
mk+1 = Amk , Σk+1 = AΣk AT + σa2 DD T
∆T
0
1
donde A =
,D=
1
∆T
0
49 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
Breve recordatorio de estadı́stica
Procesos estocásticos. Ruido blanco. Propagación.
Medidas del error.
Propagación del error para un acelerómetro II
Suponiendo que el error inicial es cero y perfectante conocido,
m0 = 0 y Σ0 = 02×2 .
Esto implica mk = 0 para todo k. Por otro lado para Σ,
definimos los coeficienes como:
Σk =
σv2k
ξk
σx2k
ξk
Insertando Σk en las ecuaciones obtenemos
σv2
k+1
ξk+1
ξk+1
σx2
=
∆T
1
0
∆T
k+1
σv2
k+1
ξk+1
ξk+1
σx2
∆T
0
k+1
1
∆T
∆T 2
2
+σa
0
0
0
Desarrollando:
σv2k+1
=
σv2k + ∆T 2 σa2
ξk+1
=
ξk + ∆T σv2k
σx2k+1
=
σx2k + ∆T 2 σv2k + 2∆T ξk
50 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
Breve recordatorio de estadı́stica
Procesos estocásticos. Ruido blanco. Propagación.
Medidas del error.
Propagación del error para un acelerómetro III
Resolviendo la primera ecuación obtenemos como antes
σv2k = k∆T 2 σa2 . Introduciendo esta ecuación en la segunda
obtenemos:
ξk+1
= ξk + k∆T 3 σa2
3
4 σ 2 ≈ k ∆T 4 σ 2 .
cuya solución es ξk = k(k−1)(2k−1)
∆T
a
a
6
3
Introduciendo esta ecuación en la tercera obtenemos:
σx2k+1
=
σx2k + k∆T 4 σa2 + k(k − 1)∆T 4 σa2 = σx2k + k 2 ∆T 4 σa2
σx2k
k(k−1)(2k−1)
4σ2
∆T
a
6
k3
≈ 3 ∆T 4 σa2 .
√ √
cuya solución es
=
Recordando
q √k∆T = t hemos obtenido: σvk = t ∆T σa y
3
σxk = t3 ∆T σa .
En las especificaciones de un acelerómetro suele venir
√ el dato
ruido en g (aceleración de la gravedad) partido
√ por Hz.
Multiplicando este dato por 9.8 obtenemos ∆T σa , en
unidades de m/s 3/2 .
51 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
Breve recordatorio de estadı́stica
Procesos estocásticos. Ruido blanco. Propagación.
Medidas del error.
Propagación del error para un acelerómetro IV
Para estimar la desviación tı́pica de la velocidad y la posición
procederı́amos como sigue:
√
Para la velocidad: bastarı́a multiplicar el valor del ruido porq t.
3
Para la posición: bastarı́a multiplicar el valor del ruido por t3 .
Existen otros errores que habrı́a también que añadir.
Ejemplo: supongamos que queremos estudiar la propagación
del ruido
sabiendo que su valor es de
√ de un acelerómetro
50µg / Hz ≈ 500 · 10−6 ms −2/3 .
√
−6 ms −2/3 = 310−2 ms −1 y
Entonces
σ
=
t500
·
10
v
p
σx = t 3 /3500 · 10−6 ms −2/3 = 62m. Luego un intervalo
2 − σ de la velocidad serı́a v ∈ [v̂ − 0,06, v̂ + 0,06] y un
intervalo 2 − σ de la posición serı́a x ∈ [x̂ − 125, x̂ + 125].
52 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
Breve recordatorio de estadı́stica
Procesos estocásticos. Ruido blanco. Propagación.
Medidas del error.
Medida del error en 2-D
Para el caso 2-D (por ejemplo posición sobre un mapa) y si el
error está distribuido como X ∼ N2 (0, Σ), las regiones de
confianza serı́an elipses:
Dado Σ podemos escribir Σ = Pdiag{σ1 , σ2 }P T donde P es
una matriz con autovectores y σi los autovalores. Los
autovectores dan la dirección de los ejes de la elipse y los
autovalores son proporcionales a su magnitud (cuyo valor
exacto dependerá del grado de confianza del intervalo).
53 / 57
Sistema de navegación autónomo: Navegación inercial.
Breve recordatorio de estadı́stica
Errores en navegación inercial.
Procesos estocásticos. Ruido blanco. Propagación.
!"#$$%&'$(")*'+%&*+","!-"
Modelos de Error
Medidas del error.
"
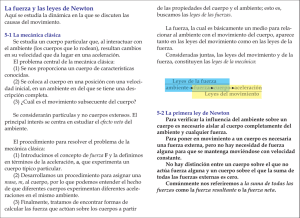
&'()"*+,"-#./0/#)."12("3#44(5"#6(2"0/7(8"0'("-#./0/#)."12(".9100(2(5"#6(2"1)"12(1"5:("0#"
7(1.:2(7()0"(22#2.;"<'/."5/.-(2./#)"#$"-#/)0."/."9133(5"1".9100(2"-3#08"='/9'"*+,"
71):$190:2(2.":.("0#"9'12190(2/>("0'(/2"(?:/-7()0@."199:219A;"<'("12(1"=/0'/)"='/9'"0'("
7(1.:2(7()0."#2"(.0/710(5"-1217(0(2."12("3/B(3A"0#"C("/."9133(5"0'("9#)$/5()9("2(4/#);""
<'("9#)$/5()9("2(4/#)"/."0'()"1)13A>(5"0#"?:1)0/$A"0'("*+,"-(2$#271)9(".010/.0/9133A;"
<'("9#)$/5()9("2(4/#)"=/0'"1"215/:."5(.92/C(."0'("-2#C1C/3/0A"0'10"0'(".#3:0/#)"=/33"C("
=/0'/)"0'(".-(9/$/(5"199:219A;""
"
D/4:2("!".'#=."0'(".9100(2"-3#0"#$"0'("EF"./)43("-#/)0"-#./0/#)."#C.(26(5"CA"0'("190:13"
G#6H0(3"IJKLM*!"2(9(/6(2"$#2"!L"'#:2."1)5"/0."199:219A"215//"#$"NJ+"1)5"OPK,;"
"
Otras medidas de error en 2-D
CEP: Circular Error Probable. Sustituye la elipse por un
cı́rculo en cuyo interior hay un 50 % de encontrar a la variable.
"
#
$
%
!"
!#
!$
%
*+,-$
.&%/$)$
$
#
"
!"#$
%&'($)
!$
!#
!"
!"#$ % !& & ' & %( )*
"
"
D/4:2("!Q"EF",/)43("+#/)0"-#./0/#)."9#33(90(5"#)"0'("2##$0#-"#$"G#6H0(3"C:/35/)4"$#2"!L"
'#:2.":./)4"G#6H0(3"IJKLM*!"2(9(/6(2"1)5"*+,H)0())1"K#5(3"RS!;"""
Es más simple de entender pero más complejo de hallar y
+,-%./#$"012%3''$%42"0%567"&28%(.345*%%
"
menos representativo estadı́sticamente
hablando. Si
OPK,"/."1"./)43("):7C(2"0'10"(T-2(..(."!O"199:219A;"U)"#25(2"0#"9#7-:0("0'("OPK,"#$"
'#2/>#)013"-#./0/#)"(22#2.8"0'(".01)5125"(22#2."V!W"$2#7"0'("B)#=)"-#./0/#)"/)"0'("
σx /3 ≤ σy ≤ 3σx , entonces
CEP ' 0,59(σx + σy ).
5/2(90/#)."#$"0'("9##25/)10("1T/."12("2(?:/2(5;""
"
Otra medida comúnmenteOPK,"/."0'(".?:12("2##0"#$"0'("16(214("#$"0'(".?:12("(22#2."='/9'"/."5($/)(5"1."$#33#=.Q"
usada (FAA) es el" 2DRMS: cı́rculo
OPK,"X" ! " ! "
que contiene
del
95
%
al
98
%
de
los
puntos.
Se calcula
q
!",01)5125"(22#2."V!W"#$"(.0/710(5"9##25/)10(."VT8"AW"#$"(19'"-#/)0"C(/)4"-#./0/#)(5"
91)"C("-2(5/90(5"$2#7"0'("9#22(.-#)5/)4"612/1)9(."#)"0'("5/14#)13"#$"0'("
9#612/1)9("7102/T;""
DRMS = σx2 + σy2 . Entonces
el 2DRMS es el cı́rculo de
radio 2 · DRMS. Igualmente
!"#$"%" existe el DRMS, 3DRMS...
!
"
!
!
54 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
Breve recordatorio de estadı́stica
Procesos estocásticos. Ruido blanco. Propagación.
Medidas del error.
Algoritmo de mı́nimos cuadrados I
En la resolución de problemas de navegación es frecuente
encontrar sistemas de ecuaciones sobredeterminados (exceso
de medidas) o incluso incompatibles (medidas no coherentes
entre sı́).
Puesto que las medidas contienen errores (de diferente
magnitud, según el tipo de medida), es conveniente resolver
estos sistemas teniendo en cuenta dicho error.
Se puede usar un algoritmo de mı́nimos cuadrados, que
resuelve un sistema del tipo: y = Az + b, donde:
y es de dimensión n y conocido (medidas).
z es de dimensión m ≤ n y es desconocido (datos a calcular).
A es conocido (medidas).
b son los errores (desconocidos): b ∼ Nm (0, Σ)
Se busca una solución ẑ de forma que Aẑ sea lo más parecido
posible a y en el sentido de los mı́nimos cuadrados.
Matemáticamente, se busca ẑ tal que la función de coste
J = (y − Aẑ)T (y − Aẑ) sea mı́nimo.
55 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
Breve recordatorio de estadı́stica
Procesos estocásticos. Ruido blanco. Propagación.
Medidas del error.
Algoritmo de mı́nimos cuadrados II
Se busca
∂J
∂ẑ
= 0.
En primer lugar: J = y T y − 2y T Aẑ + ẑ T AT Aẑ
Tomando la derivada:
∂J
∂ẑ
= −2y T A + 2ẑ T AT A
Igualándola a 0:y T A = ẑ T AT A
Despejando ẑ: ẑ T = y T A(AT A)−1 ⇒ ẑ = (AT A)−1 AT y .
Obsérvese que (AT A)−1 AT es la pseudoinversa y existe
siempre que A tenga al menos m filas (medidas)
independientes.
Propiedades estadı́sticas de la solución:
E [ẑ] = E [(AT A)−1 AT y ] = (AT A)−1 AT E [y ] = (AT A)−1 AT E [Az + b] =
(AT A)−1 AT AE [z] = E [z] = z.
Cov [ẑ] = Cov [(AT A)−1 AT y ] = (AT A)−1 AT Cov [y ]A(AT A)−1 = (AT A)−1 AT Cov [Az +
b]A(AT A)−1 = (AT A)−1 AT ACov [z]AT + Σ A(AT A)−1 = (AT A)−1 AT ΣA(AT A)−1
56 / 57
Sistema de navegación autónomo: Navegación inercial.
Errores en navegación inercial.
Modelos de Error
Breve recordatorio de estadı́stica
Procesos estocásticos. Ruido blanco. Propagación.
Medidas del error.
Algoritmo de mı́nimos cuadrados ponderados
¿Existe alguna mejora posible del algoritmo de mı́nimos
cuadrados que disminuya la covarianza de la estimación?
Se plantea ponderar las medidas en la función de coste con
una matriz de pesos W , de forma que se dé más peso a las
medidas más precisas y menos a las menos precisas. Por
tanto: J = (y − Aẑ)T W (y − Aẑ) donde W ha de ser una
matriz simétrica definida positiva.
Procediendo como antes (se deja como ejercicio) se llega a
ẑ = (AT WA)−1 AT W y .
Propiedades estadı́sticas de la solución:
E [ẑ] = z.
Cov [ẑ] = (AT WA)−1 AT W ΣWA(AT WA)−1
Para minimizar la covarianza, tomar W = Σ−1 ; es simétrica y
definida positiva, y se le da más peso a las medidas con menor
varianza y menos peso a las de mayor varianza.
Llegamos a ẑ = (AT Σ−1 A)−1 AT Σ−1 y ; calculando la
covarianza se obtiene: Cov [ẑ] = (AT Σ−1 A)−1 .
57 / 57