Inversor de MC Murry
Anuncio

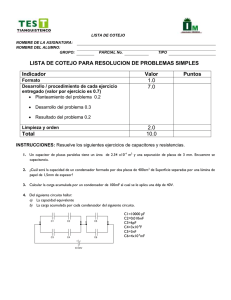
Inversor de Mc Murry...pág. 1 APUNTES PARA EL CURSO DE ELECTRÓNICA DE POTENCIA I. R. Chaer 1994. INVERSOR TIRISTORIZADO DE CONMUTACIÓN FORZADA. (INVERSOR DE MC MURRY) Introducción. En este apunte, se desarrolla el enfoque dado al tema en el curso teórico. Este enfoque tiene por objetivo, dar las herramientas que permitan que el estudiante "visualice" el funcionamiento de una rama de un inversor a tiristores con conmutación forzada. Para ello, se considera importante introducir la herramienta de análisis que es el Plano de Estados de un circuito LC. Como propósito adicional está la introducción al estudiante a la utilización de una metodología de análisis que es aplicable a otros varios convertidores de electrónica de potencia. Este material es complementario al del libro de texto utilizado en el curso. Observación de un sistema lineal de 2do orden el plano de estados. Comenzaremos por la introducción de la herramienta del plano de estado para un sistema genérico de dos variables de estado para luego aplicarlo al análisis de la evolución de un circuito LC. En general, dado un circuito lineal con dos variables de estados, sometidos a entradas constantes, la evolución del vector de estado se podrá escribir en forma matricial como: X A X R Donde X es el vector de estado, A es una matriz de 2x2 constante, R es un vector constante de dimensión 2x1 que representa al conjunto de entradas constantes. Llamaremos plano de estados del sistema al plano del vector X. La primera componente del vector X estará en el eje de las absisas y la segunda componente de X en las ordenadas, tal como se esquematiza en la siguiente figura. Inversor de Mc Murry...pág. 2 (x2) X (x1) La posición de equilibrio del sistema es aquella para la cual la derivada del vector de estados se anula. De la ecuación de estados se deduce que: X eq A1 R Para ser estrictos, la ecuación anterior es válida solamente cuando la matriz A es invertible y el desarrollo es aplicable, por lo tanto, solamente para dichos casos. En los casos prácticos en que esta condición no se cumple, el sistema tiene una solución trivial. El que exista un punto de equilibrio del sistema por supuesto que no implica que este sea estable. Es interesante "observar" la evolución del vector de estados (evolución del sistema en definitiva) desde el punto de equilibrio del sistema. Introducimos entonces un cambio de coordenadas Z X X eq que equivale a cambiar el centro de coordenadas tal como se muestra en la siguiente figura. (z1) (x2) X Z Xeq (z2) (x1) La ecuación de estados en el nuevo sistema de coordenadas es: Z A Z Suponiendo que los autovalores (o valores propios) del sistema son un par de complejos conjugados1, se puede demostrar El caso de autovalores reales es más sencillo y de menor aplicación en electrónica de potencia dado que hay un cambio 1 Inversor de Mc Murry...pág. 3 que haciendo un cambio de coordenadas es posible escribir la matriz del sistema como: a w A R A R 1 w a Siendo R la matriz de cambio de base. Llamemos (Y) al vector de estado en la nueva base. La ecuación de estados será: Y A Y La evolución del estado a partir del instante t=t0 se puede escribir como: Y t e At t0 Y0 , en donde Y0 es el estado en el instante t0. Para apreciar el significado de los coeficientes de la matriz A' calculemos su polinomio característico: 2 p(s) detI s A s a w2 Se recuerda que el polinomio característico de un transformación permanece invariante frente a los cambios de base, por lo que el polinomio anterior es el polinomio característico de la matriz A. Las raíces de p(s) son a j w . Para calcular el exponencial de A' la descomponemos en la suma de dos matrices que conmutan entre si y cuyos exponenciales individuales son bien conocidos: a 0 0 w A 0 a w 0 e e a 0 0 a t e a t 0 0 w w 0 t 0 e a t I a t e coswt senwt Rotwt senwt coswt a 0 0 w 0 w a 0 0 a w 0 w 0 0 a At a t e e Rotwt Donde se aplicó el resultado que dice que el exponencial de la suma es el producto de los exponenciales que trantándose de matrices se cumple si las matrices (sumandos) conmutan entre si. Entonces si en el instante t1 el estado es Y(t1), en un instante posterior t2 el estado será: Y t 2 e at2 t1 Rotw t 2 t1 Y t1 de coordenadas que desacopla las ecuaciones de estado en dos independientes. Inversor de Mc Murry...pág. 4 Se puede interpretar la evolución del estado entre los instantes considerados como una rotación de ángulo w(t2-t1) del estado inicial Y(t1) alrededor del origen en sentido horario seguida por una contracción (o homotecia) de constante e at 2 t1 . Si la constante de contracción es mayor que 1, el estado se alejará del origen (punto de equilibrio) a medida que pase el tiempo y corresponde a valores de a>0. Para valores de a>0 el sistema es inestable y por consiguiente si el estado se aparta, por el motivo que sea, de la posición de equilibrio se alejará de dicha posición. La evolución del estado se realiza girando con velocidad angular w en sentido antihorario y con una velocidad de crecimiento de su distancia al origen dada por a . Si a=0, el sistema es un oscilador, en el sentido que puede describir "órbitas" cerradas alrededor del origen (siempre con velocidad de giro w). Si a<0, el sistema es estable y las trayectorias serán espirales que se enrollan sobre el origen. Para completar el desarrollo general falta solamente considerar que sucede si las entradas del sistema pueden tomar valores de un conjunto discreto. En estos casos cambiará el punto de equilibrio. Observar que los cambios de coordenadas para "ver" la evolución como una roto-homotecia no cambian. Entonces, para cada uno de los posibles valores del conjunto de entradas, tendremos un punto de equilibrio (o vértice del sistema) alrededor del cual el estado evolucionará de acuerdo a la roto-homotecia fijada por los autovalores de la matriz A. Cuando se produce un cambio en las entradas, vasta con dejar el estado constante y cambiar el centro de la roto-homotecia al nuevo estado de equilibrio. En la siguiente figura se esquematiza la situación. En t1, el vector de entradas constantes es tal que el estado de equilibrio del sistema es Yeq1. De t1 a t3 el sistema evoluciona con la roto-homotecia (determinada por los autovalores de A) con centro en Yeq1. En t3 se produce un cambio en las entradas hacia un nuevo vector constante para el cual el estado de equilibrio es Yeq2 que pasa a ser el centro de la roto-homotecia. t2 t1 Yeq2 Yeq1 t3 t4 t5 Inversor de Mc Murry...pág. 5 Observación de un circuito LC. En la figura se muestra el circuito al que nos referiremos y la convención de signo adoptadas para las variables. En este caso la entrada al circuito es la fuente de tensión constante E. Como primera aplicación de la sección anterior podemos decir que si adoptamos como variables de estado la tensión en el condensador (V) y la corriente en la inductancia (I) y graficamos el estado del circuito en un plano (V,I), las trayectorias serán órbitas cerradas alrededor del estado de equilibrio fijadas por el estado inicial. Podemos además adelantar que haciendo un cambio adecuado de coordenadas, dichas órbitas son circunferencias. I C L - + V + - E En este caso el estado de equilibrio es fácil de calcular y corresponde a I=0 y V=E. Las ecuaciones del circuito son: C V I L I E V Escribiendo las mismas en forma matricial tenemos: 1 0 0 C 1 X X 1 L E 0 L V X I Los autovalores de la matriz A del sistema son las raíces 1 de: s2 0 ; por lo que en este caso la constante de LC amortiguación (a) es nula y la velocidad angular (w) es: w 1 LC Para poder visualizar correctamente las trayectorias, nos falta identificar un cambio de coordenadas tal 0 w que: A R A R 1 w 0 Lo más sencillo es realizar simplemente un cambio de escalas en las variables de estado originalmente consideradas C 0 así: Z X . Entonces, si graficamos C V en abscisas L 0 y L I en ordenadas las trayectorias serán circunferencias Inversor de Mc Murry...pág. 6 entorno al punto de equilibrio. Por comodidad etiquetaremos los ejes con los valores de las variables de estado originales. Ejemplo. El siguiente es un ejemplo de análisis de un circuito LC sometido a un generador de onda cuadrada. La siguiente figura muestra el comportamiento del circuito LC si E(t) es una onda cuadrada de valor E y 0 la mitad del período en cada uno, partiendo del estado (0,0) y suponiendo que en medio periodo el ángulo wt es pi/2 (I) t2 t6 t4 t3 t0 0 E (V) t1 t5 La trayectoria comienza en el instante t0 estando el circuito en el punto (0,0) en t1=t0+T/2, el circuito habrá girado en torno a al punto (E,0) 90º en sentido antihorario, en ese instante la tensión de la fuente vuelve a valer 0 y por consiguiente cambia el centro de giro al punto (0,0). Durante el siguiente medio periodo el estado gira 90º alrededor al (0,0) hasta el instante t2 donde cambia nuevamente el valor de la fuente. La tensión del condensador en el instante en que es máxima 1 2 C E 2 E , mientras que la corriente en t1 vale: vale: C 1 C C E E. L L Desde t2 hasta t3, el sistema evoluciona girando entorno a (E,0). En t3 el estado alcanza el punto (0,0). De t3 hasta t4 el sistema gira concentro (0,0) pero como se encuentra en dicho punto la trayectoria es el punto (0.0). A partir de t5 se repite la secuencia descripta. Inversor de Mc Murry...pág. 7 Conmutación forzada con tiristores. La siguiente figura muestra una rama de un inversor a tiristores constituida por los tiristores T1, T2 y los diodos D1 y D2. El condensador, de valor C, y la inductancia, de valor L, junto con los tiristores T3 y T4 forman el circuito auxiliar que permitirá apagar los tiristores principales (T1 y T2). Se analizará el funcionamiento del circuito en el plano de estado del circuito LC auxiliar. T1 E + - I + V - D1 T4 T3 T2 Io D2 Se supone la carga es lo suficientemente inductiva como para que la corriente de carga I0 permanezca constante durante la conmutación. Supongamos para comenzar que T1 está conduciendo y que el condensador se encuentra cargado con una tensión E0 mayor que E. En estas condiciones, T3 se encuentra con tensión aplicada E0-E y por lo tanto un disparo sobre él será efectivo. Al disparar T3 (t0), el circuito LC queda con tensión E aplicada y oscilará entorno al (E,0) creciendo la corriente por la inductancia I. Cuando la corriente por la inductancia iguala al valor de la carga Io, la corriente por T1 es 0 (t1 en la figura), como I sigue creciendo conduce el diodo D1 por donde se deriva I-I0. La corriente I pasa por su valor máximo 1 C E E 0 y comienza a decrecer. En el instante (t2) la L tensión en el condensador vale E/2 (mitad de la fuente de continua). En este instante disparamos el tiristor T2 por lo que la tensión aplicada sobre el circuito LC será 0 y el centro de giro es ahora el punto (0,0). Mientras la corriente I sea positiva sigue conduciendo T3. En el instante t4 la corriente I intenta hacerse negativa y por lo tanto se corta T3. Desde t2 hasta t3 conduce T2 dado que I es mayor que Io. En t3 comenzó a conducir el diodo de rueda libre D2 dado que la corriente I se vuelve menor que I0. Desde t3 hasta t4 conduce el diodo de rueda libre D2. En t4 se corta T3 quedando el condensador cargado al valor negativo: (E-Eo). En este estado se completó la conmutación de la rama, y conducirá D2 mientras que Io> 0; si Io se invierte conducirá T2 para lo cual se debe mantener el disparo de T2. De t4 hasta t5 el circuito permanece en el mismo estado que alcanzó en t4. En t5 disparamos T4 para iniciar el transitorio que apagará al Inversor de Mc Murry...pág. 8 tiristor T2 y poder prender T1 nuevamente. Si la corriente Io se hizo negativa durante el intervalo (t4,t5) la situación es simétrica a la de inicio. Si Io mantuvo su signo, el tiristor T2 está en realidad cortado y al disparar T4 se reanuda la oscilación alrededor del (0,0); en el instante t6 (instante en que la tensión del condensador vale E/2) disparamos T1 obligando al circuito a girar ahora alrededor a (E,0) hasta el instante t7, en que se cortará T4 y se alcanza la condición inicial. (I) t2 t3 t1 to t4 t5 Io E 0 t7 (V) t6 Para pensar. Dimensionar el circuito LC para garantizar con E= 300VDC que se pueda cortar 100A con un tiristor cuyo tq es 40us. En la práctica se producen caídas de tensión en los semiconductores hace que los centros de giro no sean exactamente los dibujados sino que según el signo de I habrá que sumar o restar al centro ideal, la caída total en los semiconductores. Además las pérdidas tanto en la inductancia como en el condensador hace que las trayectorias no sean circunferencias perfectas sino que mostrarán un leve amortiguamiento. Todo esto se debe compensar realimentando el circuito de disparó para que en lugar de forzar el cambio de centro cuando la tensión en el condensador sea E/2 lo efectúe un poco antes.