Commande optimale pour la minimisation des
Anuncio

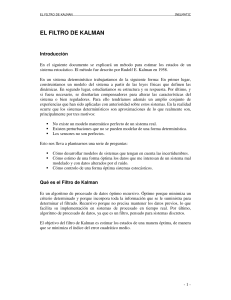
Mejora de la restitución de orbita usando un filtro de Kalman Albert RODRIGUEZ FANJUL (SUPAERO 2009 – Telecom BCN 2009) Paul SANMIGUEL (EADS Astrium – Flight Dynamics Team) 1.1.1 Introducción La determinación de órbita desempeña un papel crucial en las misiones espaciales puesto que es la única manera de establecer en qué posición se encuentra exactamente el satélite en el espacio en un momento determinado. Cuando el satélite es lanzado en órbita, determinar su posición y velocidad de forma precisa permite el cálculo y la ejecución de maniobras necesarias con el objetivo de lograr su órbita final. Las primeras maniobras realizadas, llamadas LAE, se realizan para colocar el satélite en orbitas intermediarias hasta alcanzar la última maniobra LAE, que establece el satélite en su órbita final. En esta fase deben determinarse los estados (posición y velocidad) en tan sólo la mitad de la trayectoria, permitiendo al equipo de operaciones planear la siguiente maniobra a ejecutar dependiendo de la órbita alcanzada con la anterior maniobra. basado en mínimos cuadrados por un filtro de Kalman para permitir el cálculo de la posición desde la primera medida adquirida. 1.1.2 Modelo Para resolver el problema de restitución de órbita, las ecuaciones de movimiento que describen las fuerzas actuando sobre el satélite necesitan ser establecidas. Una vez identificadas las fuerzas esenciales que actúan sobre el satélite, la posición y la velocidad pueden ser determinadas integrando la ley fundamental de la mecánica si las condiciones iníciales son conocidas. Las principales fuerzas que actúan sobre un satélite geoestacionario se muestran a continuación Cuando el satélite se encuentra en la órbita final, diversas maniobras de restablecimiento llamadas de Station Keeping se realizan para mantener el satélite en la posición deseada. En este escenario, la exigencia temporal se relaja, siendo dos días el tiempo necesario para estimar la nueva orbita. Transfer orbit 1 Geostationary orbit Transfer orbit 2 FIG. 2 – Fuerzas actuando sobre un satélite GEO V1 V2 Earth V3 Sin embargo, dos marcos distintos tienen que ser establecidos para proceder con la determinación de órbita, Un marco inercial dónde integrar las diferentes fuerzas identificadas. Un sistema de coordenadas conectado a la tierra donde expresar las medidas recolectadas por las distintas estaciones terrestres ubicada en la superficie de tierra, así como las fuerzas que son expresadas en un marco giratorio, no inercial. Injection orbit Near synchronous orbit FIG. 1 – Órbitas intermediarias para un satélite geoestacionario Con la finalidad de estimar la posición desde el primer momento, el grupo EADS Astrium ha propuesto un estudio de viabilidad para remplazar el actual sistema de determinación de órbita existente La aceleración puede calcularse fácilmente por integración numérica en el marco inercial una vez se ha multiplicado el vector aceleración por las distintas matrices de cambio de pasaje, cuyo cálculo permite obtener mediante integración numérica tanto posición como velocidad. 1.1.3 Medidas Las medidas disponibles en la restitución de órbita permiten contrastar el modelo teórico con la realidad física para poder mejorar la predicción del vector de estado y proceder con la denominada etapa de corrección. Tanto las medidas de distancia como las angulares se han utilizan en este estudio de viabilidad, siendo las primeras más precisas y menos ruidosas. Sin embargo, antes de poder utilizar las medidas, algunas correcciones han tenido que llevarse a cabo para poder proceder. Como los impulsos electromagnéticos que luego determinaran las medidas viajan a través de la atmósfera, la ionosfera modifica la trayectoria del rayo debido a las diferencias en el índice de refracción en distintas alturas que existen a lo largo de la atmósfera. Debido a este cambio en el índice de refracción, tanto las medidas de distancia (RG) como las de elevación (EL) han de ser modificados para tener en cuenta la curvatura producida en el haz. elemento en su forma Kepleriana facilitada por nuestro modelo (GEM10B) con las del modelo superior (GEM96). El error calculado es considerado como un ruido gaussiano blanco centrado, y se considera la mayor diferencia como una dispersión de 3σ. Varios ensayos han demostrado que son necesarias dos matrices distintas, puesto que el error es mucho mayor cuando el satélite está cerca de la tierra (cerca del perigeo). A causa de este hecho, la matriz de ruido de modelo es calculada según la posición del satélite respecto a la tierra. Para la matriz de covarianza de error de medida, como el ruido depende directamente de los instrumentos utilizados en la estación de control, a cada una de ellas se le asignará una matriz. El conjunto de matrices se han ajustado a partir de varios ensayes con medidas en vuelo para encontrar un reglaje adecuado. 1.1.5 Maniobras El rendimiento de una maniobra introducirá un error y una incertidumbre asociada al filtro. Si este error no es modelado, el filtro puede divergir rápidamente. Para resolver este problema, después de la realización de una maniobra, la matriz de covarianza de error es amplificada según los valores de amplitud y de dirección de la maniobra ejecutada. Por lo tanto, el error cometido tratando de estimar el elemento Kepleriano después de la maniobra es tomado en consideración por la covarianza, estabilizando el filtro y llevándolo a la convergencia como se muestra a continuación FIG. 3 – Definición de las medidas usadas 1.1.4 Kalman En la restitución de órbita, la ley de evolución depende del estado, pudiéndose escribir de forma abreviada como X (t ) f ( X (t ), t ) 0 d r G M Earth dt v r3 3 x 3 0 r 0 v i (r , v, t ) i Esta formulación generalizada de la dinámica implica relaciones fuertemente no lineales. Para poder abordar el problema, la versión extendida del filtro de Kalman (EFK) es utilizada, linearizando así las matrices de estado y de medidas en cada iteración. Para obtener el reglaje final del filtro, los resultados se han contrastado con los de un modelo de alta precisión. La matriz de error de covarianza del modelo ha sido calculado comparando cada LAE Manoeuvre performed FIG. 4 – Efecto de incrementar la covarianza del error después de una maniobra 1.1.6 Conclusiones El filtro extendido de Kalman ha demostrado ser una excelente alternativa al método de mínimos cuadrados. La posibilidad de conocer el estado a cada instante de tiempo ha demostrado ser un factor clave en la restitución de orbita, especialmente durante la fase LEOP. Otro factor a tener en cuenta ha sido el tiempo de cálculo, el cual ha disminuido drásticamente. Además, el filtro de Kalman ha demostrado a través de distintos ensayos en vuelo ser más robusto cuando las medidas contenían un alto nivel de ruido o en el caso de contener errores aberrantes. Sin embargo, incluso si el filtro de Kalman ha demostrado ser una buena alternativa a los mínimos cuadrados, algunos inconvenientes han aparecido en su implementación. El proceso ha demostrado divergir rápidamente si las condiciones iníciales no eran lo suficientemente cercanas a las reales. Sin embargo, como las suposiciones iníciales facilitadas por ARIANE y otros organismos cuentan con una gran precisión, el error inicial nunca superará el límite de estabilidad que conllevaría a una eventual divergencia del filtro.