TFM-G 300.pdf
Anuncio

Resoluciones Celulares
Umberto Martı́nez Peñas
Trabajo de Fin de Máster
Máster en Investigación en Matemáticas
Tutor: Philippe T. Gimenez
Universidad de Valladolid, 24 de junio de 2014
2
Índice
Introducción
5
1. Ideales monomiales y multigraduaciones
7
1.1. Multigraduaciones
. . . . . . . . . . . . . . . . . . . . . . . .
8
1.2. Diagramas de Betti . . . . . . . . . . . . . . . . . . . . . . . . 14
1.3. Invariantes del ideal inicial . . . . . . . . . . . . . . . . . . . . 18
1.4. Ideales Borel-fixed
. . . . . . . . . . . . . . . . . . . . . . . . 24
1.5. Otras condiciones de tipo Borel . . . . . . . . . . . . . . . . . 30
2. Complejos simpliciales y celulares
33
2.1. Complejos simpliciales . . . . . . . . . . . . . . . . . . . . . . 34
2.2. Complejos celulares . . . . . . . . . . . . . . . . . . . . . . . . 41
2.3. La resolución de Taylor . . . . . . . . . . . . . . . . . . . . . . 48
2.4. La resolución de Eliahou-Kervaire . . . . . . . . . . . . . . . . 52
3. Mapping Cones
57
3.1. Planteamiento general . . . . . . . . . . . . . . . . . . . . . . 58
3.2. La resolución de Taylor vı́a mapping cones . . . . . . . . . . . 64
3.3. La resolución de Eliahou-Kervaire generalizada . . . . . . . . . 65
3.4. La resolución de Eliahou-Kervaire es celular . . . . . . . . . . 73
3
4
ÍNDICE
Introducción
Esta memoria se enmarca en la realización de un trabajo de fin de máster
y tiene como objetivo estudiar ciertos aspectos de las resoluciones de ideales
monomiales, centrándonos en una técnica que ha surgido recientemente, y
que es la de estudiar dichas resoluciones desde un punto de vista topológico
combinatorio, que da lugar a las resoluciones celulares que aparecen en el
tı́tulo.
Dentro de la teorı́a de las sicigias graduadas, juegan un papel muy importante las resoluciones libres minimales graduadas de ideales monomiales
en el anillo de polinomios. La importancia de su estudio fue remarcada por
Kaplansky a principios de los años sesenta, y ha recibido un fuerte impulso
tras ciertas obras que han conectado dichas resoluciones con aspectos combinatorios, como son los libros de Stanley y de Bruns y Herzog ([BH]), aparte
de los muchos artı́culos recientes que han surgido en las últimas dos décadas,
y de los cuales trataremos algunos.
Este trabajo constituye una continuación natural del trabajo de fin de
grado [Mar]. Tener dicho punto de partida nos permitirá llegar en breve
a resultados de actualidad, y que desarrollaremos en los tres capı́tulos. En
el primer capı́tulo, tras introducir algunos conceptos que no aparecı́an
en [Mar], veremos la relación que hay entre los invariantes de un ideal homogéneo y su ideal inicial, y que dan otra motivación para estudiar los ideales
monomiales. Finalmente, daremos dos ejemplos de familias de ideales monomiales que son bien conocidos en la actualidad, pero que siguen en el punto
de mira de la investigación en este campo (como demuestran los artı́culos
[HT], [Mer], [DM] y [Goo]), y que son los ideales estables y estables
libres de cuadrados, y de los que los ideales Borel-fixed son un caso particular en caracterı́stica cero. En el segundo capı́tulo, introduciremos los
conceptos combinatorios clave en relación a las resoluciones celulares. In5
6
INTRODUCCIÓN
troduciremos los complejos simpliciales y los celulares, y veremos otras de sus
aplicaciones, como la correspondencia de Stanley-Reisner. Finalmente, en
el tercer capı́tulo, presentamos una técnica que ha sido usada en topologı́a
algebraica prácticamente desde sus comienzos, que es la de mapping cones,
y que ha tenido un impulso en la teorı́a de resoluciones monomiales en la actualidad gracias a varios artı́culos recientes. En particular, presentamos dos
artı́culos, [HT] y [DM], en los que se da una resolución que generaliza la de
Eliahou-Kervaire, y que resulta ser celular.
Capı́tulo 1
Ideales monomiales y
multigraduaciones
Los ideales monomiales del anillo de polinomios S = k[x1 , . . . , xn ] juegan un papel muy importante en Álgebra Conmutativa. Esto es debido a
varios hechos. Por un lado, a la estrecha relación que hay entre un ideal I
y su ideal inicial in(I), pues conocida la resolución libre minimal graduada
o algunos invariantes de uno de ellos, se pueden obtener ciertas propiedades
para el otro (por ejemplo, cotas para los invariantes). Y por otro lado, recientemente se ha establecido una estrecha relación entre los ideales monomiales
y la combinatoria. Esta relación comenzó con el estudio de la correspondencia que hay entre ideales monomiales libres de cuadrados y complejos
simpliciales, debido a Richard Stanley y Gerald Reisner en los años setenta.
Sin embargo, a finales de los años noventa se dio una vuelta de tuerca más,
y se inició el estudio de ideales monomiales a través de complejos celulares,
como veremos en el segundo capı́tulo.
Por otro lado, muchos conceptos, como el de graduación, se especializan
para el caso de ideales monomiales. En este capı́tulo estudiaremos varios
resultados relativos a ideales monomiales y veremos algunas relaciones entre
un ideal y su ideal inicial. Finalmente, veremos cómo para cierta familia de
ideales monomiales, los llamados ideales Borel-fixed (y más generalmente,
los ideales estables), se conoce explı́citamente su resolución libre minimal
graduada y, por tanto, todos sus invariantes. No daremos aún la prueba de
que el complejo que introducimos es de hecho una resolución (lo veremos en
7
8 CAPÍTULO 1. IDEALES MONOMIALES Y MULTIGRADUACIONES
el capı́tulo tercero), pero veremos cuáles son sus consecuencias inmediatas.
El punto de partida de este primer capı́tulo será [Mar], donde aparecen
la mayorı́a de requisitos previos que necesitaremos para esta memoria. Por
tanto, citaremos si es necesario, pero sin repetirlos, algunos de los resultados
que ahı́ aparecen y que necesitemos. Por otro lado, varias referencias que
incluyen los requisitos y muchos de los resultados de este capı́tulo son [Eis],
[Pee] y [MS].
Notación. La notación que usaremos a lo largo de toda la memoria será la
siguiente:
N = {0, 1, 2, 3, . . .},
k será un cuerpo,
char(k) su caracterı́stica, en principio arbitraria,
S el anillo de polinomios k[x1 , . . . , xn ] (el contexto nos dirá cual es n, el
número de indeterminadas),
a = (a1 , . . . , an ) los elementos de Nn ,
|a| = a1 + . . . + an ,
xa = xa11 · · · xann los monomios de S,
P
f = λa xa será un polinomio genérico de S,
m será el ideal maximal homogéneo de S, es decir, m = hx1 , . . . , xn i, y
rank(M ) será el rango de un R-módulo libre M , sobre el anillo R.
Además, normalmente los elementos de S m se escribirán en negrita.
1.1.
Multigraduaciones
Como se ve al comienzo de [Mar], una propiedad importante del anillo de
polinomios es que admite una graduación natural, denominada graduación
estándar. Dicha graduación es la que surge al trabajar con polinomios homogéneos, entre los cuales están los monomios. Sin embargo, para tratar
ideales monomiales, es conveniente introducir una graduación más refinada.
Pero antes, veamos la definición general de graduación sobre un anillo, que
1.1. MULTIGRADUACIONES
9
no es más que una generalización de [Mar, definición 1.1] (ver también [Eis,
Section 1.5]).
Definición 1.1. Sean R un anillo y N un monoide conmutativo (es decir, un
semigrupo conmutativo con elemento neutro). Diremos que R es graduado
sobre N si existen subgrupos {Rm }m∈N de R tales que
1. R =
L
m∈N
Rm (como grupos), y
2. Rm Rm0 ⊂ Rm+m0 , ∀m, m0 ∈ N.
Análogamente, si M es un R-módulo, se dice que es graduado sobre N si
existen subgrupos suyos {Mm }m∈N tales que
1. M =
L
m∈N
Mm (como grupos), y
2. Rm Mm0 ⊂ Mm+m0 , ∀m, m0 ∈ N.
Rm y Mm se denominan componentes homogéneas m-ésimas de R y M ,
respectivamente, y a sus elementos, f , elementos homogéneos o formas
de grado m de R y M , respectivamente.
P
Si f ∈ R, se escribe de forma única como f =
m fm con fm ∈ Rm
y fm = 0 salvo para una cantidad finita. Decimos entonces que fm es la
componente homogénea m-ésima de f . Análogamente para módulos.
Si denotamos por 0 al elemento neutro de N , vemos que de R0 R0 ⊂ R0
se deduce que R0 en realidad es un subanillo de R, y de R0 Rm ⊂ Rm se
deduce que cada Rm es un R0 -módulo, y la suma directa es suma directa de
R0 -módulos. Análogamente para módulos.
Tomando R = S y N = N, vemos que S es graduado sobre N utilizando
la graduación estándar. Ahora consideremos N = Nn . Entonces, obtenemos
una graduación de S sobre Nn dada por:
Sa = {axa /a ∈ k} = hxa ik ,
o equivalentemente, dada por la asignación de multigrados mdeg(xi ) =
ei , donde ei es el vector i-ésimo estándar de Nn . Esta graduación de S se
denomina multigraduación o Nn -graduación estándar.
10 CAPÍTULO 1. IDEALES MONOMIALES Y MULTIGRADUACIONES
Observemos que los elementos homogéneos de S para esta graduación son
precisamente los monomios, y mdeg(xa ) = a. Dado un S-módulo multigraduado M y a ∈ Nn , podemos definir igualmente la graduación desplazada o trasladada (shifted) con desfase (shift) a, como M (−a) tal que
M (−a)b = Mb−a , donde se define Mc = 0 si c ∈ Zn tiene alguna componente negativa. Es decir, los grados de M (−a) son los mismos que los de M ,
pero comenzando en grado a.
Aunque no sea costumbre, por comodidad utilizaremos a veces una notación monomial para denotar los multigrados. Es decir, en lugar de usar el
monoide Nn , pasamos a usar el monoide formado por los monomios de S,
{xa /a ∈ Nn }, junto con la operación de multiplicación. Con dicha notación,
escribiremos la graduación trasladada como M (xa ) = M (−a). Por ejemplo, S(xa ) ⊕ S(xb ) = S(−a) ⊕ S(−b), y dirı́amos que e1 tiene multigrado
mdeg(e1 ) = xa .
Por otro lado, se suele decir que esta Nn -graduación es una graduación
refinada de la estándar, lo cual es debido a que
M
M
Si =
Sa y Mi =
Ma .
|a|=i
|a|=i
Pasemos ahora a ver cómo muchos de los conceptos y resultados relativos
a la graduación de S sobre N se traducen a la multigraduación. Por brevedad,
tratamos conjuntamente el caso de ideales y módulos sobre S, y no damos las
demostraciones debido a que son las mismas que aparecen en [Mar, Capı́tulo
1] para la graduación sobre N.
Proposición
1.2. Sea N un submódulo de un S-módulo multigraduado M =
L
M
.
Son
equivalentes:
a
a∈Nn
1. Si m ∈ N , entonces toda componente homogénea de m está en N .
L
2. N = a∈Nn Na (como grupos), donde Na = N ∩ Ma .
3. N está generado por sus elementos homogéneos.
A todo submódulo que cumpla estas propiedades se le denomina submódulo
multigraduado de M
L, y es un módulo multigraduado con la graduación
heredada de M , N = a∈Nn Na .
1.1. MULTIGRADUACIONES
11
Vemos, por tanto, que los ideales multigraduados de S son exactamente
los ideales monomiales, y los submódulos monomiales de S m (ver [Mar,
definición 3.8]) son multigraduados, con la graduación dada por mdeg(xa ei ) =
a, pero hay submódulos multigraduados que no son monomiales. También
observamos que todo cociente M/N , donde M y N son ambos multigraduados, vuelve a heredar de forma natural una multigraduación (ver [Mar,
proposición 1.14]).
Se definen igualmente los homomorfismos multigraduados, los complejos multigraduados y las resoluciones multigraduadas (ver [Mar,
1.15, 1.25 y 1.32]). Observamos igualmente que núcleos, imágenes y conúcleos
de homomorfismos multigraduados son de nuevo módulos multigraduados
(ver [Mar, proposición 1.16]). Se obtiene de nuevo que todo módulo multigraduado admite una resolución libre minimal multigraduada, es decir,
una resolución libre multigraduada que verifica que di+1 (Fi+1 ) ⊂ mFi , para
i ≥ 0, donde Fi son los módulos libres de la resolución y di , las diferenciales.
La construcción funciona igual debido a que tenemos un lema de Nakayama
multigraduado, donde observamos de nuevo que el ideal m = hx1 , . . . , xn i
es multigraduado y todo ideal propio multigraduado está contenido en él.
Lema 1.3 (de Nakayama multigraduado). Sean J un ideal propio multigraduado de S y M un S-módulo multigraduado. Se cumple que:
1. Si M = JM , entonces M = 0.
2. Si M = JM + N , donde N es un submódulo multigraduado de M ,
entonces M = N .
Demostración. Igual que en el caso graduado, basta ver 1, pues para 2
tomamos M/N . La prueba es esencialmente la misma que para el caso graduado, pero ahora necesitamos considerar un orden monomial < en S, que
es un orden en el conjunto de multigrados. Si M 6= 0, tomamos m un generador homogéneo de multigrado mı́nimo (para <) de M , entonces m ∈ JM ,
y como los elementos homogéneos de J tienen grados no nulos, llegamos a la
contradicción mdeg(m) > mdeg(m), para el orden monomial elegido.
Y como consecuencia, obtenemos los resultados que habı́amos anticipado:
Teorema 1.4. Sea M un S-módulo multigraduado finitamente generado.
Entonces:
12 CAPÍTULO 1. IDEALES MONOMIALES Y MULTIGRADUACIONES
1. Si {m1 , . . . , mp } es una base del k-espacio vectorial M = M/mM , con
mi un elemento homogéneo de M , entonces {m1 , . . . , mp } es un sistema
minimal de generadores homogéneos de M . Además, todo sistema minimal de generadores homogéneos de M se obtiene de esta forma.
2. Todo sistema minimal de generadores homogéneos de M tiene p elementos, y de los cuales, dimk (M a ) tienen multigrado a.
3. Si M es libre y {m1 , . . . , mp } es un sistema minimal de generadores homogéneos, entonces forma una base y, por tanto, existe un isomorfismo
multigraduado S(−a1 ) ⊕ . . . ⊕ S(−ap ) ∼
= M.
4. La resolución libre minimal graduada de M coincide con su resolución
libre minimal multigraduada y, por tanto, toda resolución libre multigraduada de M es suma directa de la minimal y un complejo multigraduado trivial corto (ver [Mar, 1.37 y 1.38]).
Demostración. Los apartados 1, 2 y 3 se demuestran de la misma forma que
en el caso graduado (ver [Mar, 1.18 y 1.19]). En cuanto al cuarto apartado,
la resolución libre minimal graduada de M se construye tomando en cada
paso (en M o en los núcleos sucesivos) un sistema minimal de generadores
homogéneos para la graduación sobre N (ver [Mar, 1.33 y 1.36]). En el caso
multigraduado, se pueden tomar dichos generadores multigraduados, de tal
manera que la resolución que se obtiene es multigraduada. Dicha resolución
cumple igualmente (por [Mar, 1.36]) la condición di+1 (Fi+1 ) ⊂ mFi , para
i ≥ 0.
Observamos que, como caso particular del segundo apartado de este teorema, obtenemos que todo ideal monomial de S (o todo submódulo monomial
de S m ) admite un único sistema minimal de generadores monomiales. Este
hecho se puede probar también de forma elemental (ver [Mar, corolario 3.11])
o viendo que un sistema minimal de generadores monomiales no es más que
una base de Groebner reducida (para cualquier orden monomial, ver [Mar,
teorema 3.26]).
Por otra parte, los invariantes numéricos definidos para ideales y módulos graduados sobre N (ver [Mar, 1.42 y 4.1]) pueden refinarse para el caso
multigraduado:
1.1. MULTIGRADUACIONES
13
Definición 1.5. Sean M un S-módulo multigraduado finitamente generado
y (F, d) su resolución libre minimal multigraduada. Se definen los siguientes
invariantes:
1. Los números de Betti multigraduados
de M (sobre S) son los
L
ci,a
S
S
(M ) < ∞,
(βi,a
números βi,a (M ) = ci,a , donde Fi =
a∈Nn S(−a)
pues Fi es finitamente generado).
2. La función de Hilbert multigraduada de M es la función HilbM :
Nn −→ Z definida por HilbM (a) = dimk (Ma ).
3. La serie de Hilbert multigraduada de M es la serie
X
HM (x1 , . . . , xn ) =
dimk (Ma )xa ∈ Z[[x1 , . . . , xn ]].
a∈Nn
Observemos que, si M = I es un ideal monomial, las funciones de Hilbert
de I y S/I tienen llegada en {0, 1} y lo único que indican es qué monomios
están en I y S/I. Por tanto, observamos que:
X
X
xa .
HI (x1 , . . . , xn ) =
xa y HS/I (x1 , . . . , xn ) =
xa ∈I
xa ∈I
/
En particular, se obtiene fácilmente por inducción en n que
X
1
xa =
HS (x1 , . . . , xn ) =
.
(1 − x1 ) · · · (1 − xn )
a∈Nn
Por otra parte, el hecho de que la graduación sobre Nn refine a la graduación
sobre N se traduce en términos de números de Betti y serie de Hilbert en lo
siguiente:
S
βi,p
(M )
=
X
S
βi,a
(M )
y
βiS (M )
=
∞
X
p=0
|a|=p
S
βi,p
(M ) =
X
S
βi,a
a∈Nn
y, por otra parte,
HM (t) = HM (t, . . . , t),
que, aplicado a M = S, proporciona la serie de Hilbert graduada de S (ver
[Mar, proposición 4.4], donde aparece una demostración diferente):
HS (t) =
1
.
(1 − t)n
14 CAPÍTULO 1. IDEALES MONOMIALES Y MULTIGRADUACIONES
Por último, finalizamos esta sección observando que se obtiene igualmente
una descripción de los números de Betti multigraduados en términos del
funtor derivado Tor (ver [Mar, proposición 2.14]):
Proposición 1.6. Sean M y N dos S-módulos multigraduados. Entonces:
1. TorSi (M, N ) es un S-módulo multigraduado de forma natural.
S
2. Si M es finitamente generado, entonces βi,a
= dimk (TorSi (M, k)a ).
Demostración.
1. Dada una resolución libre multigraduada (F, d) de M ,
tenemos que (F ⊗ N, d ⊗ IdN ) es un complejo multigraduado dado por
la graduación:
M
(Fi ⊗ N )a =
(Fi,b ⊗ Nc ).
b+c=a
TorSi (M, N )
Ahora, como
= Hi (F ⊗ N ) es un cociente de módulos
multigraduados, hereda una multigraduación de forma natural.
2. Sea (F, d) la resolución libre minimal multigraduada de M . Si escribimos Fi,a = S βi,a (M ) , tenemos que
(Fi ⊗S k)a = Fi,a ⊗S k = S βi,a (M ) ⊗S k ∼
= k βi,a (M ) .
Como F es minimal, se tiene que di+1 (Fi+1 ) ⊂ mFi , por lo que la
diferencial del complejo (F ⊗ k, d ⊗ Idk ) es nula y TorSi (M, N )a ∼
=S
βi,a (M )
k
, de donde se deduce el resultado.
Observación 1.7. Debido a que el complejo de Koszul es la resolución
libre minimal multigraduada de k = S/m (ver [Mar, teorema 2.32]), vemos
que:
S
βi,a
(M ) = dimk (TorSi (M, k)a ) = dimk (Hi (K(x1 , . . . , xn ) ⊗ M )a ).
1.2.
Diagramas de Betti
Los números de Betti de un S-módulo nos proporcionan gran parte de
la información almacenada en su resolución libre minimal graduada, pues a
1.2. DIAGRAMAS DE BETTI
15
partir de ellos obtenemos los módulos libres de la resolución (faltarı́a determinar las diferenciales). En el caso multigraduado, los números de Betti
multigraduados proporcionan más información, pues las diferenciales vendrán dadas por matrices cuyos coeficientes serán monomios, y estos, si son
no nulos, vendrán dados por los multigrados de los elementos de la base de
los módulos libres de la resolución.
En todo caso, para muchos S-módulos no se conocen explı́citamente todos
sus números de Betti, pero sı́ que se pueden obtener cotas. Si M es un
S-módulo graduado finitamente generado, sabemos (por el teorema de las
sicigias de Hilbert, ver [Mar, 1.47, 1.48, 2.33 ó 3.40]) que su resolución libre
minimal graduada tiene longitud finita (la dimensión proyectiva de M ) y, por
tanto, sus números de Betti no graduados βiS (M ) quedan acotados por:
βiS (M ) ≤ máx{βiS (M )/i ≤ dpS (M )} y βiS (M ) = 0 ⇐⇒ i > dpS (M ).
S
En cuanto a los números de Betti graduados, sabemos que βi,j
(M ) = 0
si j < i + c, donde c es el mı́nimo grado de un elemento en un sistema
minimal de generadores homogéneos de M (ver [Mar, proposición 1.45]). Es
S
(M ).
decir, fijado un grado homológico i, tenemos una cota inferior de βi,j
Para estudiar cuáles pueden ser cotas superiores, se introduce la noción de
regularidad:
Definición 1.8. Sea M un S-módulo graduado finitamente generado. Se
define su regularidad de Castelnuovo-Mumford o, simplemente regularidad, como:
S
regS (M ) = máx{j/βi,i+j
(M ) 6= 0 para algún i}.
S
S
La razón por la que se estudia βi,i+j
(M ) en lugar de βi,j
(M ) tiene que ver
con la cota inferior que citábamos antes, y con la forma tradicional de escribir
los números de Betti graduados en una tabla. Si denotamos, por simplicidad,
βi y βi,j a los números de Betti de M , llamamos diagrama de Betti de M
sobre S a la siguiente tabla:
0
1
2
3
..
.
β0
β0,0
β0,1
β0,2
β0,3
..
.
β1
β1,1
β1,2
β1,3
β1,4
..
.
β2
β2,2
β2,3
β2,4
β2,5
..
.
r β0,r β1,1+r β2,2+r
...
βd
. . . βd,d
. . . βd,d+1
. . . βd,d+2
. . . βd,d+3
..
..
.
.
. . . βd,d+r .
16 CAPÍTULO 1. IDEALES MONOMIALES Y MULTIGRADUACIONES
Entonces, vemos que podemos introducir todos los números de Betti graduados no nulos en una tabla finita como esta, donde, si exigimos que la
última columna, d, y la última fila, r, no tengan todos sus coeficientes nulos,
entonces por definición vemos que d = dpS (M ) y r = regS (M ). Es decir,
la dimensión proyectiva y la regularidad nos acotan el diagrama de Betti lo
máximo posible.
Suele ser costumbre utilizar la siguiente nomenclatura a la hora de estudiar casos extremos de diagramas de Betti:
Definición 1.9. Sean M un S-módulo graduado finitamente generado y
(F, d) una resolución libre graduada suya. Se dice que dicha resolución es
pura si Fi = S(−pi )ci , y se dice que es q-lineal si Fi = S(−q − i)ci , para
i ≥ 0, donde q ∈ N. Se dice simplemente que es lineal si es 0-lineal.
Por otra parte, si q es el mı́nimo grado de un generador minimal homogéneo de M y (F, d) es la resolución libre minimal graduada de M , se
define la banda lineal (linear strand en inglés) de M como el subcomplejo:
d
i
S(−q−(i−1))βi−1,i−1+q −→ . . . −→ S(−q)β0,q .
L(F) ≡ . . . −→ S(−q−i)βi,i+q −→
Es decir, la resolución libre minimal graduada de M es pura si en el
diagrama de Betti sólo hay un coeficiente no nulo por columna, y es q-lineal
si los coeficientes no nulos están concentrados en la fila q. Por otro lado, la
banda lineal de M refleja los números de Betti de la primera fila no nula
del diagrama.
Un ejemplo clásico de resolución lineal es el complejo de Koszul:
Ejemplo 1.10. Consideremos el S-módulo graduado k = S/m. Sabemos
(por [Mar, teorema 2.32]) que el complejo de Koszul K(x1 , . . . , xn ) es la
resolución libre minimal graduada de k, donde los elementos ej1 ∧ . . . ∧ eji ,
con j1 < j2 < . . . < ji , forman una base de Ki , cuya graduación está dada
por deg(ej1 ∧ . . . ∧ eji ) = i. Por tanto, dicha resolución adquiere la forma
0 −→ S(−n) −→ S(−n + 1)n −→ . . . −→ S(−1)n −→ S −→ k −→ 0.
S
Es decir, βi,i
(k) = ni , la resolución es lineal y el diagrama queda:
β0
β1
β2
...
βn−1
βn
n(n−1)
0 β0,0 = 1 β1,1 = n β2,2 = 2
. . . βn−1,n−1 = n βn,n = 1,
1.2. DIAGRAMAS DE BETTI
17
por lo que dpS (k) = n y regS (k) = 0.
Ejemplo 1.11. En general, podrı́amos proceder como en el ejemplo anterior
para cualquier sucesión S-regular de monomios m1 , . . . mr ∈ S. De la
misma forma que se demuestra en [Mar, teorema 2.32], se verifica que el
complejo de Koszul K(m1 , . . . , mr ) es la resolución libre minimal graduada
de S/hm1 , . . . , mr i. Ahora, la graduación estarı́a dada por
deg(ej1 ∧ . . . ∧ eji ) = deg(m1 ) + . . . + deg(mr ).
Sin embargo, esta resolución no tiene por qué ser necesariamente lineal, pero
es fácil verificar que es lineal si, y sólo si, los mi son variables, y si deg(mi ) = q
para i = 1, . . . , r, entonces la resolución es pura, aunque no es q-lineal, y el
diagrama de Betti serı́a:
0
..
.
q−1
..
.
(r − 1)(q − 1)
..
.
r(q − 1)
β0
β0,0 = 1
β1
...
...
βr−1
βr
...
β1,q = r . . .
...
. . . βr−1,(r−1)q = r
...
...
βr,rq = 1,
de donde dpS (S/hm1 , . . . , mr i) = r y regS (S/hm1 , . . . , mr i) = r(q − 1), y
vemos además que en este caso la banda lineal es un complejo no exacto.
Un caso particular es el de las potencias de variables xq1 , . . . , xqn . En general, todas las sucesiones de la forma xa11 , . . . , xar r son S-regulares (ver [Eis,
corollary 17.8, exercise 17.5]).
Finalizamos la sección con una observación sobre resoluciones q-lineales.
Sabemos de [Mar, teorema 4.5] que podemos calcular la serie (y la función)
de Hilbert de un S-módulo finitamente generado a partir de sus números de
Betti. Ahora bien, en el caso de que la resolución libre minimal graduada de
dicho módulo sea q-lineal, entonces podemos obtener los números de Betti a
partir de la serie de Hilbert:
Proposición 1.12. Sea M un S-módulo graduado finitamente generado. Si
su resolución libre minimal graduada es q-lineal para algún q ∈ N, entonces
se pueden obtener los números de Betti de M a partir de su serie de Hilbert.
18 CAPÍTULO 1. IDEALES MONOMIALES Y MULTIGRADUACIONES
Demostración. Por [Mar, teorema 4.5], obtenemos que
n
(1 − t) HM (t) =
d
X
S
(−1)i βi,i+q
ti+q ,
i=0
de donde se obtienen los números de Betti.
1.3.
Invariantes del ideal inicial
En esta sección veremos cómo se relacionan los invariantes de un ideal de
S y su ideal inicial para un cierto orden monomial dado. Primero veremos que
ambos tienen la misma función de Hilbert, y después veremos que en general
no ocurre lo mismo para los números de Betti: los del ideal inicial suelen
ser mayores. Para ver esto último, necesitaremos usar varios resultados sobre
deformaciones en el anillo de polinomios, de los cuales no demostraremos
todos por brevedad (la principal referencia será [Eis, Chapter 15]). Dado
un orden monomial <, denotaremos siempre por in(I) al ideal inicial de I
respecto de <.
Teorema 1.13 (de Macaulay). Sean I un ideal de S y < un orden monomial. Entonces, los monomios que no están en in(I) forman una base como
k-espacio vectorial de S/I.
Demostración. Primero, si f = a1 m1 +. . . as ms ∈ I, donde los ai son escalares
y los mi , monomios, entonces in(f ) = aj mj , para cierto j, de donde se
deduce la independencia lineal. Para ver que son generadores, sean f ∈ S y
{g1 , . . . , gs } una base de Groebner de I. Del algoritmo de división (ver [Mar,
teorema 3.7]), obtenemos la expresión f = a1 g1 + . . . + as gs + r, por lo que
f − r ∈ I, y ningún monomio de r está en in(I), de donde se deduce que el
conjunto de monomios fuera de in(I) generan S/I.
Y como corolario inmediato obtenemos la relación entre las funciones
de Hilbert de ambos ideales:
Corolario 1.14. Sean I un ideal homogéneo de S y < un orden monomial. Entonces S/I y S/in(I) tienen la misma función de Hilbert. Además,
si J ⊂ S es un ideal monomial con la misma función de Hilbert que I, y
1.3. INVARIANTES DEL IDEAL INICIAL
19
J ⊂ in(I) ó in(I) ⊂ J, entonces J = in(I).
El estudio de los números de Betti del ideal inicial es bastante más
complicado, y requiere dos conceptos clave: los órdenes en el conjunto de
monomios dados por pesos, y las deformaciones entre ideales.
Definición 1.15. Se denomina función peso a toda aplicación Z-lineal λ :
Zn −→ Z. Se define su vector de pesos como wλ ∈ Zn tal que wi = λ(ei ),
para i = 1, . . . , n, y su orden asociado como el orden parcial en el conjunto
de monomios de S dado por:
xa ≤λ xb
⇐⇒
a = b ó λ(a) < λ(b).
Dado un orden monomial < en S, se dice que λ es compatible con < ó que
este refina al orden <λ si m <λ n implica que m < n, para todos los
monomios m, n ∈ S.
Por último, dado f ∈ S, se define su polinomio inicial, inλ (f ), como
la suma de todos los términos de f maximales respecto del orden <λ . Y si
I ⊂ S es un ideal, se define su ideal inicial respecto de λ, inλ (I), como el
ideal generado por los polinomios iniciales de los polinomios de I.
Antes de continuar, hay que destacar un par de aspectos de este tipo de
órdenes. Por un lado, no son órdenes monomiales, pues no son totales. Sin
embargo, si los pesos son no negativos, entonces definen una graduación en
S dada por degλ (xi ) = wi = λ(ei ). El orden <λ no es más que el orden dado
por el grado. Por tanto, podemos extenderlo a un orden monomial utilizando,
por ejemplo, el orden lexicográfico para comparar dos monomios distintos con
el mismo grado.
Por otro lado, este tipo de órdenes, a pesar de ser parciales, cumplen todos
los resultados básicos de la teorı́a de bases de Groebner, siempre que los pesos
sean no negativos y los polinomios iniciales de los polinomios involucrados
sean monomios.
Ejemplo 1.16. Consideremos los polinomios f = xy y g = y + xy en k[x, y],
y sean λ y µ las funciones dadas por los pesos (1, 1) y (−1, −1).
Vemos que para λ, inλ (g) = xy, es un monomio, y podemos dividir f
por g mediante el algoritmo clásico ([Mar, teorema 3.7]). Obtenemos que
20 CAPÍTULO 1. IDEALES MONOMIALES Y MULTIGRADUACIONES
f = qg + r, con q = 1 y r = −y, y el monomio inicial de r no puede ser
dividido por inλ (g) = xy.
Por otro lado, para µ, inµ (g) = y, también es un monomio, pero si intentamos dividir f por g mediante el algoritmo clásico, vemos que dicho
algoritmo no termina nunca. Esto es debido a que para <µ existen sucesiones
decrecientes que no se estabilizan, ya que tiene pesos negativos. Vemos también que <µ no podrı́a ser extendido a un orden monomial, ya que estos son
buenos órdenes.
Nosotros nos centraremos en funciones con pesos no negativos, es decir,
funciones del tipo λ : Nn −→ N. Los dos siguientes lemas técnicos se pueden
encontrar en [Eis, exercise 15.12 y proposition 15.16]:
Lema 1.17 (de Bayer). Sean < un orden monomial en S y m1 > n1 , . . . , mr >
nr pares de monomios. Entonces existe una función peso λ : Zn −→ Z compatible con < tal que m1 >λ n1 , . . . , mr >λ nr .
Lema 1.18. Sean < un orden monomial en S, I ⊂ S un ideal y {g1 , . . . , gs }
una base de Groebner suya. Entonces existen pares de monomios m1 >
n1 , . . . , mr > nr tales que, si λ : Zn −→ Z verifica que m1 >λ n1 , . . . , mr >λ
nr , entonces inλ (I) = in< (I) y {g1 , . . . , gs } es una base de Groebner de I
respecto de <λ .
Observemos que el segundo lema no trata casos “vacı́os”, pues el primer
lema garantiza que siempre existe al menos una función λ que verifica las
hipótesis. Añadiendo los monomios y relaciones x1 > 1, . . . , xn > 1, vemos
que siempre podemos tomar pesos positivos.
Por otro lado, dada una función peso λ : Zn −→ Z, podemos considerar
el anillo de polinomios con una variable extra Se = S[t] = k[x1 , . . . , xn , t], y
e dada por los pesos w
e λ,
e = (w, 1).
extender λ a una función peso en S,
Sea ahora f ∈ S, definimos su homogeneización en Se como
fe(x1 , . . . , xn , t) = tmáx λ(mi ) f (t−λ(x1 ) x1 , . . . , t−λ(xn ) xn ).
Es decir, fe realmente es la homogeneización en Se para la graduación dada
e si son no negativos.
por los pesos w,
1.3. INVARIANTES DEL IDEAL INICIAL
21
Dado un ideal I ⊂ S, se define su homogeneización en Se como Ie =
e
h{f /f ∈ I}i.
Tenemos entonces morfismos naturales de k-álgebras:
1. ϕ0 : Se −→ S tal que ϕ0 (xi ) = xi y ϕ0 (t) = 0. Verifica obviamente que
e = inλ (I).
ϕ0 (fe) = inλ (f ) y ϕ0 (I)
2. ϕ1 : Se −→ S tal que ϕ1 (xi ) = xi y ϕ1 (t) = 1. Verifica entonces que
e = I.
ϕ1 (fe) = f y ϕ1 (I)
La principal propiedad que nos interesa de este proceso de homogeneización
en Se es la siguiente:
Teorema 1.19. Sean I ⊂ S un ideal y λ : Zn −→ Z una función peso, con
e Ie es libre. En particular, es plana y
pesos no negativos. La k[t]-álgebra S/
e I-regular,
e
t − α ∈ k[t] es un elemento S/
para todo α ∈ k.
Demostración. La primera parte del teorema se encuentra en [Eis, theorem
15.17]. Ahora, si t − α ∈ k[t], entonces la aplicación k[t] −→ k[t] que consiste
e I,
e vemos que
en multiplicar por t − α, es inyectiva. Tensorizando con S/
e I-regular.
e
t − α ∈ k[t] es S/
En esta situación, se dice que los ideales I e inλ (I) están conectados
e Ie
por una deformación en A1k , y que son las fibras de la familia plana S/
sobre 1 y 0, respectivamente.
Antes de ver el principal resultado sobre los números de Betti del ideal
inicial, necesitamos un par de lemas:
Lema 1.20. Consideremos en S una graduación dada por pesos no negativos
en las variables, y sean I ⊂ S un ideal homogéneo contenido en m y R =
S/I. Sean M un R-módulo finitamente generado, y (F, d) una resolución
libre suya. Si f ∈ R es un elemento R-regular y M -regular, entonces (F ⊗
R/hf i, d ⊗ Id) es una resolución libre de M/hf iM sobre R/hf i.
Si además, M y F son graduados y f homogéneo, entonces F ⊗ R/hf i es
graduada, y si F es minimal y f ∈ m, entonces F ⊗ R/hf i es minimal.
22 CAPÍTULO 1. IDEALES MONOMIALES Y MULTIGRADUACIONES
Demostración. Para ver la exactitud de F ⊗ R/hf i, basta tomar la sucesión
exacta larga en homologı́a (ver [Mar, teorema 2.3]) en el siguiente diagrama:
↓
↓
↓
f
0 −→ F1 −→ F1 −→ F1 ⊗ R/hf i −→ 0
↓
↓
↓
f
0 −→ F0 −→ F0 −→ F0 ⊗ R/hf i −→ 0
↓
↓
↓
f
0 −→ M −→ M −→
↓
↓
0
0
M/hf iM
↓
0
−→ 0.
Por otro lado, si f ∈ m (es decir, si I +hf i ⊂ m), entonces podemos hablar de
minimalidad de una resolución sobre el anillo R/hf i, es decir, de la condición
di+1 (Fi+1 ) ⊂ mFi , para i ≥ 0. Ahora, si los pesos de las variables son positivos
y f no es una unidad, obtenemos automáticamente que f ∈ m, la condición
I ⊂ m es superflua y la minimalidad de la resolución coincide con [Mar,
definición 1.34], por la caracterización [Mar, lema 1.36].
Lema 1.21. Sean a, b ∈ Nn , con las componentes de b positivas. Consideramos en S las graduaciones dadas por los pesos a y b en las variables.
Sean I ⊂ J ⊂ S ideales homogéneos respecto de a y b. Entonces, existe una
resolución libre, F, de S/J sobre el anillo S/I, que es graduada respecto de
a y b, y minimal, es decir, di+1 (Fi+1 ) ⊂ mFi , para i ≥ 0.
Demostración. Sea R = S/I. Basta observar que si tomamos un R-módulo libre graduado por a y b tal que exista una base de elementos que son
homogéneos tanto para a como para b, entonces todo submódulo suyo homogéneo para a y b, admite un sistema minimal de generadores que son
homogéneos tanto para a como para b. Por tanto, podemos realizar la construcción descrita en [Mar, teorema 1.33], tomando sistemas minimales de
generadores homogéneos para a y b. Como los pesos de b son positivos, la
minimalidad equivale a la condición di+1 (Fi+1 ) ⊂ mFi , para i ≥ 0, por [Mar,
lema 1.36].
Y, por último, vemos la relación entre los números de Betti del ideal
inicial y el original:
1.3. INVARIANTES DEL IDEAL INICIAL
23
Teorema 1.22. Sean I ⊂ J ⊂ S ideales homogéneos para la graduación
estándar, y < un orden monomial en S. Entonces:
S/I
S/in(I)
1. βi,j (S/J) ≤ βi,j
(S/in(J)), para todo i, j.
S
S
(S/in(J)), para todo i, j.
(S/J) ≤ βi,j
2. βi,j
Además, los números de Betti de la izquierda se obtienen de los de la derecha
por cancelaciones sucesivas.
Demostración. Sean a = (1, . . . , 1, 0) ∈ Nn+1 , λ una función peso con pesos
positivos tal que inλ (I) = in< (I) y inλ (J) = in< (J) (existe por 1.17 y 1.18),
w su vector de pesos y b = (w, 1) ∈ Nn+1 .
Entonces, Ie y Je son homogéneos respecto de a y b. Por el lema anterior,
e de S/
e Je sobre S/
e I,
e graduada respecto de a y b
existe una resolución libre F
e I-regulares
e
e J-regulares,
e
y minimal. Ahora, t, t − 1 ∈ k[t] son S/
y S/
por 1.19.
Por tanto, por 1.20,
e ⊗ S/hti
e
1. F
es una resolución libre graduada de S/in(J) sobre S/in(I),
que además es minimal porque t ∈ hx1 , . . . , xn , ti.
e ⊗ S/ht
e − 1i es una resolución libre graduada de S/J sobre S/I, que
2. F
no tiene por qué ser minimal, ya que t − 1 ∈
/ hx1 , . . . , xn , ti.
S/in(I)
S/I
(S/in(J)). Tomando I = 0,
Por tanto, βi,j (S/J) ≤ rank(Ff
i,j ) = βi,j
obtenemos 2, y la última afirmación se deduce de [Mar, teorema 1.38].
Esta desigualdad entre los números de Betti se verifica en contextos más
generales, y se demuestra con el mismo procedimiento (ver [MS, section
8.3]). Debido a que lo utilizaremos en una sección posterior, enunciamos el
teorema para módulos y multigraduaciones, que es un caso particular de
[MS, theorem 8.29]:
Teorema 1.23. Sea M un submódulo graduado (resp. multigraduado) de un
módulo libre sobre S, S r = S(−p1 ) ⊕ . . . ⊕ S(−pr ) (resp. S r = S(−a1 ) ⊕ . . . ⊕
S(−ar )), y sea < un orden monomial en S r . Entonces:
S
S
βi,j
(S r /M ) ≤ βi,j
(S r /in(M ))
S
S
(resp. βi,a
(S r /M ) ≤ βi,a
(S r /in(M ))),
para todos i, j ∈ N (resp. para todo i ∈ N y todo a ∈ Nn ).
24 CAPÍTULO 1. IDEALES MONOMIALES Y MULTIGRADUACIONES
1.4.
Ideales Borel-fixed
Aunque existan métodos constructivos para hallar la resolución libre minimal graduada de un ideal homogéneo cualquiera (ver [Mar, capı́tulo 3]), y
por tanto obtener también sus invariantes, en general no se conocen muchas
familias de ideales para los cuales exista una descripción explı́cita de dicha
resolución ni sus invariantes. Quizá una de las familias más importantes de
ideales, de hecho monomiales, para la cuál se conocen todos los invariantes de
forma explı́cita, son los llamados ideales Borel-fixed, que estudiaremos en
esta sección. Su resolución libre minimal graduada apareció por primera vez
en [EK], y por eso se suele denominar resolución de Eliahou-Kervaire.
Los ideales Borel-fixed aparecen de forma natural en geometrı́a algebraica
en el estudio de acciones de grupos sobre el anillo de polinomios S =
k[x1 , . . . , xn ], cuando el cuerpo k es de caracterı́stica cero. En esta sección,
daremos los principales resultados relacionados con estos ideales. Algunos los
demostraremos en capı́tulos posteriores, y otros no los demostraremos por
brevedad.
Definición 1.24. Sea n ∈ N, n > 0. Definimos el n-ésimo grupo lineal general sobre k como el grupo GLn (k), formado por todas las matrices
invertibles de tamaño n × n con coeficientes en k. Definimos el grupo de
Borel, denotado por Bn (k), y el grupo tórico, denotado por Tn (k), como los subgrupos de GLn (k) formados por matrices triangulares inferiores y
diagonales, respectivamente.
Observemos que cualquier subgrupo G de GLn (k) actúa sobre el anillo
de polinomios, S, de la siguiente manera:
!
n
n
X
X
a1,j xj , . . . ,
an,j xj .
A · f (x1 , . . . , xn ) = f (A · x) = f
j=1
j=1
Ahora, si I ⊂ S es un ideal, podemos definir A·I = {A·f /f ∈ I} (obviamente
es un ideal). Diremos que un ideal I es fijo por la acción de G si A · I = I,
para toda matriz A ∈ G. Observemos que
Tn (k) ⊂ Bn (k) ⊂ GLn (k).
Los ideales fijos por estos tres grupos admiten caracterizaciones sencillas
cuando la caracterı́stica de k es cero. Veámoslo en las tres siguientes
proposiciones:
1.4. IDEALES BOREL-FIXED
25
Proposición 1.25. Si char(k) = 0, un ideal I ⊂ S es fijo por la acción del
grupo tórico, Tn (k), si, y sólo si, es monomial.
Demostración. Es inmediato ver que los ideales monomiales son fijos por esta
acción. Veamos la implicación recı́proca. Sea I un ideal fijo por la acción de
Tn (k), tomemos un orden monomial < y la base de Groebner reducida de I
respecto de <, {g1 , . . . , gs }, y veamos que los gi son monomios, es decir, que
su único término es su término inicial.
Consideremos n números primos 0 < p1 < p2 < . . . < pn , y sea la matriz
diagonal P = diag(p1 , p2 , . . . , pn ), formada con dichos primos. Es obvio que
si xa 6= xb , entonces por ser char(k) = 0, al evaluar dichos monomios en
(p1 , . . . , pn ), obtenemos elementos distintos de k.
Por tanto, si 1 ≤ j ≤ s y λ ∈ k es la evaluación del monomio in(gj )
en (p1 , . . . , pn ), obtenemos que λgj − P · gj ∈ I, pero sus términos son los
de gj − in(gj ) multiplicados por escalares no nulos, y ninguno de ellos es
divisible por ningún in(gi ), por ser la base de Groebner reducida. Por tanto,
debe ser gj = in(gj ), y hemos terminado.
Ejemplo 1.26. La condición char(k) = 0 no se puede omitir. Para verlo,
consideremos el cuerpo de dos elementos k = F2 = Z/h2i, por lo que Tn (k)
se reduce a la matriz identidad, y todo ideal de S es fijo por su acción. Sin
embargo, en S siempre hay ideales no monomiales, como por ejemplo el ideal
principal I = hx1 + x2 + . . . + xn i (para n > 1).
Proposición 1.27. Si char(k) = 0, un ideal I ⊂ S es fijo por la acción
del grupo de Borel, Bn (k), si, y sólo si, es monomial y satisface la siguiente
condición: Si m ∈ I es un monomio tal que xj divide a m e i < j, entonces
xi · (m/xj ) ∈ I.
Demostración. Supongamos que I es fijo por la acción de Bn (k). Como
Tn (k) ⊂ Bn (k), por la proposición anterior, I es monomial. Sea entonces
m = xa ∈ I, con aj > 0 e i < j, y consideremos la matriz A formada por
unos en la diagonal y en la posición (j, i), y ceros en el resto. Entonces:
aj X
aj a1
a −r
A·m=
x1 · · · xai i · · · (xri · xj j ) · · · xann ∈ I.
r
r=0
Por tanto, como arj 6= 0, todos los términos pertenecen a I, en particular
xi · (m/xj ) pertenece a I.
26 CAPÍTULO 1. IDEALES MONOMIALES Y MULTIGRADUACIONES
Supongamos ahora que I es monomial y verifica la condición de la proposición. Basta ver que para cualquier monomio m ∈ I y cualquier matriz
A ∈ Bn (k), se verifica que A · m ∈ I. Utilizando una expresión similar a
la anterior, vemos que todos los términos de A · m son escalares que multiplican a monomios obtenidos a partir de m mediante transformaciones sucesivas
de la forma xi · (m/xj ) ∈ I, con i < j.
Corolario 1.28. Si char(k) = 0, entonces un ideal no nulo I ⊂ S es fijo por
la acción del grupo lineal general, GLn (k), si, y sólo si, es una potencia del
ideal homogéneo maximal, es decir, si existe d > 0 tal que I = md .
Demostración. Si I = md para algún d > 0, es ovbio que A · I ⊂ I, para toda
A ∈ GLn (k), pues A · m es un polinomio homogéneo de grado d si m es un
monomio de grado d. Utilizando que A−1 · I ⊂ I, vemos que I es fijo por la
acción de GLn (k).
Recı́procamente, Si I es fijo por la acción de GLn (k), debe ser monomial
por 1.25, y si m ∈ I es un monomio de grado d > 0, con d mı́nimo posible,
vemos entonces que md ⊂ I aplicando transformaciones del tipo anterior,
usando la caracterización de 1.27 para matrices triangulares inferiores, y la
respectiva para superiores. Ahora bien, md contiene a todos los monomios de
grado mayor o igual que d, por lo que I = md .
Ejemplo 1.29. Al igual que en 1.25, en las dos caracterizaciones anteriores,
la condición char(k) = 0 es necesaria. Consideremos de nuevo k = F2 , por lo
que GL2 (F2 ) es:
1 0
0 1
1 1
1 0
1 1
0 1
,
,
,
,
,
.
0 1
1 0
0 1
1 1
1 0
1 1
Entonces es obvio que I = hx2 , y 2 i ⊂ F2 [x, y] es fijo por su acción, pues
(x + y)2 = x2 + y 2 , pero I no es una potencia del maximal, ni verifica la
condición de la proposición 1.27, ya que deberı́a verificar xy ∈ I.
Aunque estas caracterizaciones no se verifiquen cuando char(k) > 0, sı́ que
podemos definir en caracterı́stica arbitraria una noción similar a la de ideal
Borel-fixed:
Definición 1.30. Decimos que un ideal monomial I ⊂ S es fuertemente
estable (strongly stable en inglés) si verifica la condición de Borel: Si
m ∈ I es un monomio tal que xj divide a m e i < j, entonces xi · (m/xj ) ∈ I.
1.4. IDEALES BOREL-FIXED
27
Ejemplo 1.31. Algunos primeros ejemplos sencillos de ideales fuertemente
estables pueden ser hx2 , xy, xz 3 i, hx2 , xy, y 3 , xz 2 i ó el ideal con siete generadores hx2 , y 6 , xy 2 , xyz 2 , xz 6 , xyzt2 , xyt4 i, donde el orden de las variables es el
usual.
Obviamente, aunque char(k) > 0, se verifica que los ideales del tipo md ,
con d > 0, son fuertemente estables. También observamos que un ideal monomial I ⊂ S verifica la condición de Borel si, y sólo si, verifica dicha condición
para un sistema de generadores monomiales dado. En particular, podemos
tomar el sistema minimal.
Aparte de la caracterización en términos de cierta acción de grupo, los
ideales Borel-fixed también aparecen en geometrı́a algebraica en lo que se
denomina el ideal inicial genérico. No daremos las demostraciones de los
dos siguientes teoremas, las cuales se encuentran en [Eis, theorem 15.18 y
theorem 15.20].
Teorema 1.32 (de Galligo, Bayer y Stillman). Sea I ⊂ S un ideal
homogéneo. Dado un orden monomial < que verifica x1 > . . . > xn , existe
un abierto de Zariski U de GLn (k), no vacı́o, tal que in(A · I) no depende
de A ∈ U . Además, U ∩ Bn (k) 6= ∅.
Dicho ideal se denomina ideal inicial genérico de I respecto de <, y
se denota por gin< (I). Su nombre se debe a que dicho ideal es el inicial de
I respecto de < en “coordenadas genéricas”, ya que es el mismo para casi
todo A · I, A ∈ U , y dicha acción se puede entender como un cambio de
coordenadas en k n .
Teorema 1.33 (de Galligo). En las condiciones anteriores, si char(k) = 0,
entonces gin< (I) es Borel-fixed.
Y el siguiente teorema, demostrado en [BSti, theorem 2.4], también
señala la importancia de conocer la resolución libre minimal graduada de
los ideales fuertemente estables:
Teorema 1.34. Sean I ⊂ S un ideal homogéneo y < el orden lexicográfico
inverso. Si in(I) es fuertemente estable, entonces
reg(I) = reg(in(I)).
28 CAPÍTULO 1. IDEALES MONOMIALES Y MULTIGRADUACIONES
Por último, veamos la descripción explı́cita de la resolución de EliahouKervaire. Primero, dado un monomio xa ∈ S, definimos mı́n(xa ) = mı́n{i/ai 6=
0} y máx(xa ) = máx{i/ai 6= 0}. En lo que sigue, I ⊂ S será un ideal
monomial, y {m1 , . . . , mr } su sistema minimal de generadores monomiales.
Supondremos que I verifica una condición un poco más débil que la de fuertemente estable: para cada j = 1, 2, . . . , r y cada i ≤ máx(mj ), se tiene que
xi · (mj /xmáx(mj ) ) ∈ I. A estos ideales se les denomina estables, a secas.
Lema 1.35. Para todo monomio m ∈ I, existe una única descomposición
en monomios m = mi n, tal que máx(mi ) ≤ mı́n(n). Se denota b(m) = mi y
e(m) = n (“principio” y “final” de m respecto de I).
Demostración. Primero, existe un j tal que m = mj n0 . Si no se verifica
que máx(mj ) ≤ mı́n(n0 ), entonces xmı́n(n0 ) (mj /xmáx(mj ) ) = mk n00 . Tomando
m0 = n00 xmáx(mj ) (n0 /xmı́n(n0 ) ), obtenemos la descomposición m = mk m0 , que
verifica máx(mk ) ≤ máx(mj ) y mı́n(m0 ) ≥ mı́n(n0 ). Debemos llegar en un
número finito de pasos a la descomposición que buscamos, pues cada vez
obtenemos un monomio distinto de entre {m1 , . . . , mr }. Por último, dicha
descomposición es única por ser el sistema de generadores minimal.
Con estas notaciones, llamamos resolución de Eliahou-Kervaire de
I
S/I al complejo (EKI , ∂), tal que EKp+1
es el S-módulo libre cuya base
denotamos por:
{(mi ; j1 , . . . , jp )/1 ≤ j1 < j2 < . . . < jp < máx(mi ), 1 ≤ i ≤ r},
si p ≥ 1, de base {(m1 ; ∅), . . . , (mr ; ∅)} si p = 0, y definimos EK0I = S.
Damos la multigraduación mdeg(mi ; j1 , . . . , jp ) = xj1 xj2 · · · xjp mi , y definimos la diferencial como ∂ = d1 − d2 , donde:
p
X
d1 (mi ; j1 , . . . , jp ) =
(−1)q xjq (mi ; j1 , . . . , jbq , . . . , jp ), y
q=1
d2 (mi ; j1 , . . . , jp ) =
p
X
(−1)q e(mi xjq )(b(mi xjq ); j1 , . . . , jbq , . . . , jp ),
q=1
para p ≥ 1, ∂(mi ; ∅) = mi para p = 0, y ∂ : S −→ S/I, el homomorfismo
canónico. También, adoptamos el convenio (mi ; j1 , . . . , jp ) = 0 si máx(mi ) ≤
jq para algún 1 ≤ q ≤ p, ó si p ≥ máx(mi ).
1.4. IDEALES BOREL-FIXED
29
Veremos en capı́tulos posteriores que (EKI , ∂) es la resolución libre minimal multigraduada de S/I. Lo único que no es sencillo es comprobar su
exactitud, pero el hecho de ser un complejo (es decir, ∂ 2 = 0) es una comprobación rutinaria (la omitimos por brevedad), y la minimalidad es obvia,
I
pues ∂(EKp+1
) ⊂ mEKpI .
Una vez que hayamos visto que realmente es una resolución, podemos
hallar explı́citamente los invariantes de los ideales estables, ya que estos se
“leen” en la resolución:
Proposición 1.36. Dado un ideal estable I ⊂ S, y {m1 , . . . , mr } su sistema
minimal de generadores monomiales, se verifica que:
Xmáx(mi ) − 1
=
, sumando para los mi con deg(mi ) = q,
1.
p
r X
máx(mi ) − 1
S
2. βp (I) =
,
p
i=1
S
(I)
βp,p+q
3. dpS (I) = máx{máx(mi ) − 1/1 ≤ i ≤ r}, y
4. regS (I) = máx{deg(mi )/1 ≤ i ≤ r}.
Por otro lado, la serie de Hilbert de un ideal estable se puede describir de
forma sencilla, gracias también al lema 1.35:
Proposición 1.37. Sea, como antes, I ⊂ S un ideal estable generado por
los monomios m1 , . . . , mr ∈ S, de forma minimal. Entonces,
Pr Qui −1
i=1 mi
j=1 (1 − xj )
,
HI (x) =
(1 − x1 ) · · · (1 − xn )
donde ui = máx(mi ).
Demostración. Basta usar 1.35 y tener en cuenta del capı́tulo primero que
HI (x) =
X
xa ∈I
xa
y HS (x) =
1
.
(1 − x1 ) · · · (1 − xn )
30 CAPÍTULO 1. IDEALES MONOMIALES Y MULTIGRADUACIONES
1.5.
Otras condiciones de tipo Borel
En esta sección veremos brevemente dos familias de ideales monomiales
similares a la de ideales fuertemente estables. La primera, menos conocida
en la actualidad, intenta imitar el comportamiento de los ideales Borel-fixed
cuando la caracterı́stica del cuerpo k es positiva, mientras que la segunda,
conocida en la actualidad de forma explı́cita, hace compatible la propiedad
de Borel con los ideales monomiales libres de cuadrados.
Primero introducimos el siguiente orden parcial en N. Sea p un número
primo. Para cada
a, b ∈ N, definimos el orden a <p b si, y sólo si, a < b y p
no divide a ab . En [Eis, proposition 15.21] se da una caracterización de este
orden debida a Gauss.
Definición 1.38. Si char(k) = p > 0, decimos que un ideal monomial I ⊂ S
es p-Borel-fixed si verifica la condición p-Borel: Si m ∈ I es un monomio tal
que xrj divide a m, con r máximo posible, e i < j, entonces (xi /xj )s · m ∈ I,
para todo s ≤p r.
De nuevo, basta comprobar esta propiedad para un sistema generadores
monomiales de I cualquiera, en particular, el minimal.
Ejemplo 1.39. Quizá el ejemplo más sencillo de ideal p-Borel-fixed sea I =
hxp1 , . . . , xpn i, pues el único s de la definición posible
para cada generador es
p
s = p, ya que si 0 < s < p, entonces p divide a s y por tanto, s ≮p p.
La importancia de estos ideales viene dada por un resultado análogo a
1.33, demostrado en [Eis, theorem 15.23], junto con el teorema 1.34:
Teorema 1.40. Si I ⊂ S es un ideal homogéneo y char(k) = p > 0, entonces
gin< (I) es p-Borel-fixed.
Sin embargo, esta clase de ideales aún presentan muchos problemas abiertos en la actualidad, como queda expuesto en [Pee, problems 28.16]. No se
conoce de forma explı́cita su resolución libre minimal graduada, ni siquiera algunos de sus invariantes más importantes, como su regularidad o sus números
de Betti. Otro problema abierto es ver si su resolución e invariantes dependen
de la caracterı́stica, p, al contrario de lo que ocurre para los ideales fuertemente estables.
1.5. OTRAS CONDICIONES DE TIPO BOREL
31
Veamos ahora los ideales conocidos como fuertemente estables libres de
cuadrados. Dado un monomio cualquiera m ∈ S, decimos que es libre de
cuadrados si x2i no lo divide, para todo i = 1, . . . , n. Es decir, si es un
producto de variables no repetidas. Y decimos que un ideal I ⊂ S es libre
de cuadrados si está generado por monomios libres de cuadrados.
Definición 1.41. Decimos que un ideal libre de cuadrados I ⊂ S es fuertemente estable libre de cuadrados si verifica la condición de Borel libre de
cuadrados: Si m ∈ I es un monomio tal que xj divide a m, i < j y xi · (m/xj )
es libre de cuadrados, entonces xi · (m/xj ) ∈ I.
Como antes, decimos que I es estable libre de cuadrados si verifica
que xi · (m/xmáx(m) ) ∈ I, para todo generador monomial minimal m de I, tal
que i < máx(m) y xi · (m/xmáx(m) ) es libre de cuadrados.
Los ideales libres de cuadrados son, por definición, monomiales, y como
en los otros casos, basta que la condición Borel libre de cuadrados se verifique
para el sistema minimal de generadores monomiales.
Ejemplo 1.42. Ejemplos sencillos de ideales fuertemente estables libres de
cuadrados son hxy, yz, zxi, hx, yzi ó hx, yz, yti, donde el orden de las variables
es el usual.
Puede surgir confusión entre los ideales fuertemente estables libres de
cuadrados y los ideales libres de cuadrados que son fuertemente estables. Sin
embargo, es sencillo comprobar que de hecho los ideales libres de cuadrados
que son estables son los de la forma hx1 , x2 , . . . , xr i, para 1 ≤ r ≤ n.
En este caso, el resultado análogo a 1.33 en relación con estos ideales tiene
que ver con las álgebras exteriores. No entraremos en detalles, simplemente
enunciaremos el teorema por completitud (ver [Pee, theorem 56.6]):
Teorema 1.43 (de Aramova, Herzog y Hibi). El ideal genérico inical de
un ideal homogéneo en una álgebra exterior es fuertemente estable libre de
cuadrados.
A diferencia de los ideales p-Borel-fixed, para estos ideales se conoce su
resolución libre minimal graduada, denominada en la literatura resolución
de Eliahou-Kervaire libre de cuadrados, por analogı́a a la de los ideales
estables. Su descripción es similar. Tomemos un ideal estable libre de cuadrados I ⊂ S, de generadores monomiales minimales m1 , . . . , mr . Primero, se
verifica un lema similar a 1.35, con la misma demostración:
32 CAPÍTULO 1. IDEALES MONOMIALES Y MULTIGRADUACIONES
Lema 1.44. Para todo monomio libre de cuadrados m ∈ I, existe una única
descomposición en monomios m = mi n, tal que máx(mi ) ≤ mı́n(n). Se
denota b(m) = mi y e(m) = n (“principio” y “final” de m respecto de I).
g I , ∂), tal que EK
g Ip+1 es el S-módulo libre
Definimos ahora el complejo (EK
cuya base denotamos por:
{(mi ; j1 , . . . , jp )/1 ≤ j1 < j2 < . . . < jp < máx(mi ), 1 ≤ i ≤ r,
y mi xj1 · · · xjp es libre de cuadrados},
g I = S.
si p ≥ 1, de base {(m1 ; ∅), . . . , (mr ; ∅)} si p = 0, y definimos EK
0
Damos la multigraduación mdeg(mi ; j1 , . . . , jp ) = xj1 xj2 . . . xjp mi , y definimos la diferencial como ∂ = d1 − d2 , donde:
p
X
d1 (mi ; j1 , . . . , jp ) =
(−1)q xjq (mi ; j1 , . . . , jbq , . . . , jp ), y
q=1
d2 (mi ; j1 , . . . , jp ) =
p
X
(−1)q e(mi xjq )(b(mi xjq ); j1 , . . . , jbq , . . . , jp ),
q=1
para p ≥ 1, ∂(mi ; ∅) = mi para p = 0, y ∂ : S −→ S/I, el homomorfismo
canónico. También, adoptamos el convenio (mi ; j1 , . . . , jp ) = 0 si máx(mi ) ≤
jq para algún 1 ≤ q ≤ p, ó si p ≥ máx(mi ), ó si xj1 . . . xjp mi no es libre de
cuadrados.
De nuevo, la única parte complicada es ver que dicho complejo es exacto,
y podemos extraer de él los invariantes de I:
Proposición 1.45. Dado un ideal estable libre de cuadrados I ⊂ S, y
{m1 , . . . , mr } su sistema minimal de generadores monomiales, se verifica que:
Xmáx(mi ) − deg(mi )
S
1. βp,p+q (I) =
, sumando para los mi tales que
p
deg(mi ) = q,
r X
máx(mi ) − deg(mi )
S
2. βp (I) =
,
p
i=1
3. dpS (I) = máx{máx(mi ) − deg(mi )/1 ≤ i ≤ r}, y
4. regS (I) = máx{deg(mi )/1 ≤ i ≤ r}.
Capı́tulo 2
Complejos simpliciales y
celulares
Las resoluciones monomiales se han estudiado recientemente desde muchos puntos de vista, gracias a la rica información combinatoria que guardan.
Sin embargo, ha dado especialmente frutos su relación con complejos que surgen en Topologı́a Algebraica, debido principalmente a dos trabajos, [BPS]
primero y [BStu] después, que a su vez se basan en ideas recogidas en [BH].
La idea principal es construir un objeto topológico, como los complejos
simpliciales, polihedrales o celulares, y obtener a partir de ellos un complejo
de módulos que acabe proporcionando una resolución de cierto ideal monomial.
Quizá el ejemplo más sencillo de todos sea la resolución de Taylor, que
apareció por primera vez en la tesis de D. Taylor en 1960. Dicha resolución
constituye una resolución libre multigraduada de un ideal monomial dado,
construida simplemente a partir de unos generadores dados. Obviamente, no
siempre dicha resolución será minimal. Sin embargo, a partir de los trabajos
anteriores sobre resoluciones simpliciales, se observó que dicha resolución
está codificada de forma natural en la estructura combinatoria de un sı́mplice.
En este capı́tulo veremos los conceptos y resultados básicos relativos a
las resoluciones celulares, comenzando por las más sencillas, es decir, las
simpliciales, y terminaremos hallando los números de Betti multigraduados
de los ideales fuertemente estables. No entraremos en detalles topológicos
para no extendernos ni desviarnos de nuestro objetivo. Referencias generales
33
34
CAPÍTULO 2. COMPLEJOS SIMPLICIALES Y CELULARES
para ello son [Rot] y [Mas], aunque ciertas secciones de [MS] o [BH] también
serán de gran utilidad.
2.1.
Complejos simpliciales
En esta primera sección veremos el tipo más sencillo de complejo celular, que son los complejos simpliciales. Antes de utilizar estos objetos para
obtener resoluciones monomiales, se utilizaron para explorar la estructura
combinatoria de los ideales libres de cuadrados, mediante lo que se denomina
la correspondencia de Stanley-Reisner.
Comenzamos con las definiciones básicas, haciendo la distinción, conveniente para la generalización a complejos celulares, entre complejos simpliciales abstractos y geométricos. Recordemos que la clausura convexa de un
subconjunto de Rd , para cierto d, es la intersección de todos los subconjuntos
convexos que lo contienen, y es por tanto, el menor conjunto convexo de Rd
que lo contiene (ver [Rot, chapter 2]).
Definición 2.1. Sean r, d ∈ N, r, d > 0. Un sı́mplice geométrico en Rd es
la clausura convexa de r puntos v1 , v2 , . . . , vr ∈ Rd , afinmente independientes,
denominados vértices del sı́mplice. Llamamos caras de dicho sı́mplice a
los sı́mplices cuyos vértices son algunos de los vi . Un complejo simplicial
geométrico en Rd es una colección ∆ de sı́mplices (llamados caras de ∆),
en Rd , tales que:
1. Si σ ∈ ∆ y τ es una cara de σ, entonces τ ∈ ∆.
2. Si σ, τ ∈ ∆, entonces σ ∩ τ es, o bien vacı́a, o bien una cara común a σ
y τ.
Denotamos por V (∆) ⊂ Rd al conjunto de vértices de todas las caras de ∆,
y denotamos por |∆| ⊂ Rd a la unión conjuntista de todas las caras de ∆.
Por otro lado, un complejo simplicial abstracto en los r vértices A =
{a1 , a2 , . . . , ar } es una colección ∆ de subconjuntos (llamados caras de ∆)
de A tal que {ai } ⊂ ∆, para todo i = 1, 2, . . . , r, y si σ ∈ ∆ y τ ⊂ σ, entonces
τ ∈ ∆. También denotaremos V (∆) = A.
2.1. COMPLEJOS SIMPLICIALES
35
En ambos casos, se define la dimensión de una cara σ ∈ ∆ como
dim(σ) = s − 1, donde s es el número de vértices que lo forman, y se define
dim(∆) = máx{dim(σ)/σ ∈ ∆}.
Observación 2.2. Es bien conocido que ambos conceptos de complejo simplicial son equivalentes ([Rot, theorem 7.8]). Dado un complejo simplicial
e de vértices V (∆) y cuyos sı́mplices
geométrico ∆, obtenemos uno abstracto ∆,
son los conjuntos V (σ), donde σ ∈ ∆.
Recı́procamente, dado un complejo simplicial abstracto ∆ de vértices
V (∆) = {a1 , . . . , ar }, consideramos en Rr el complejo simplicial geométrico dado por los sı́mplices σ
e, donde σ
e es la clausura convexa de los vectores
canónicos ei1 , . . . , eis , si σ = {ai1 , . . . , ais } ∈ ∆. Por ejemplo, el complejo
abstracto ∆ formado por los subconjuntos de {a, b}, {b, c} y {c, a} se corresponde con el complejo geométrico de la figura:
c
R3
b
a
Figura 2.1: Realización geométrica de ∆.
A partir de ahora, llamaremos simplemente complejo simplicial a todo
complejo simplicial abstracto.
Observación 2.3. Normalmente y para abreviar, diremos que ∆ es un complejo simplicial en r vértices, si es un complejo simplicial abstracto en los
vértices {1, 2, . . . , r}. Se suele considerar también como complejo simplicial
al complejo vacı́o, ∆ = ∅, cuya dimensión se define como dim(∅) = −∞,
que no debe confundirse con el complejo irrelevante {∅}, cuya dimensión
es −1 (Asumimos por definición que el vacı́o es una cara de todo complejo
simplicial).
En la sección 1.5 vimos qué eran los ideales libres de cuadrados. A continuación veremos que estos están estrechamente relacionados con los com-
36
CAPÍTULO 2. COMPLEJOS SIMPLICIALES Y CELULARES
plejos simpliciales, hasta el punto de que hay una correspondencia biunı́voca
entre unos y otros:
Definición 2.4. Dado un subconjunto σ ⊂ {1, 2, . . . , n}, definimos:
Y
xσ =
xi y mσ = h{xi /i ∈ σ}i,
i∈σ
en S = k[x1 , . . . , xn ]. Por otro lado, dado un complejo simplicial ∆ en n
vértices, definimos su ideal y anillo de Stanley-Reisner como
I∆ = h{xσ /σ ∈
/ ∆}i y S∆ = S/I∆ ,
respectivamente. Llamaremos correspondencia de Stanley-Reisner a la
dada por ∆
I∆ .
Ası́ definidos, observamos que los monomios libres de cuadrados que no
se anulan en S/I∆ son exactamente los de la forma xσ , donde σ ∈ ∆. Por
esta razón, la correspondencia de Stanley-Reisner es inyectiva. Como todo
ideal libre de cuadrados se puede expresar en la forma I∆ , vemos que dicha
correspondencia es una biyección entre el conjunto de todos los complejos
simpliciales en n vértices, y el conjunto de ideales libres de cuadrados en S.
Ejemplo 2.5. El complejo simplicial ∆ formado por todos los subconjuntos de {1, 2, . . . , n} salvo el total (un “sı́mplice hueco”) se corresponde con
el ideal principal I∆ = hx1 x2 · · · xn i, mientras que el ideal maximal m =
hx1 , x2 , . . . , xn i se corresponde con el complejo irrelevante {∅}.
x1
x1
x3
x4
x3
x4
x2
x2
(a) ∆
I∆ .
Figura 2.2: (a) ∆
x5
(b) Γ
I∆ , (b) Γ
IΓ .
IΓ .
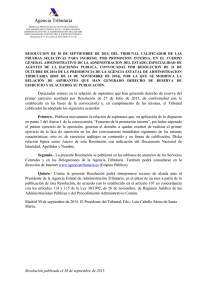
Un par de ejemplos sencillos no triviales pueden ser los siguientes: un
triángulo y un punto, ∆, en n = 4 vértices, formado por los subconjuntos de
{1, 2, 3} y {4}. Se corresponde con el ideal I∆ = hx1 x4 , x2 x4 , x3 x4 i. El otro
ejemplo serı́a Γ, formado por los subconjuntos de {1, 2, 3}, {3, 4}, {3, 5} y
{4, 5}. Se corresponde con el ideal IΓ = hx1 x4 , x1 x5 , x2 x4 , x2 x5 , x3 x4 x5 i. Ver
la figura 2.2.
2.1. COMPLEJOS SIMPLICIALES
37
Por otro lado, esta correspondencia también nos permite expresar mediante complejos simpliciales algunas caracterı́sticas de los ideales libres de
cuadrados, como se puede observar en los tres resultados siguientes:
Proposición 2.6. Todo ideal libre de cuadrados admite una única descomposición irredundante como intersección de ideales primos de S. Además,
para I∆ , dicha descomposición se obtiene a partir de:
\
I∆ =
mσ ,
σ∈∆
donde σ indica el complementario de σ.
Demostración. Primero, es sencillo comprobar que los ideales monomiales
radicales y los ideales monomiales primos son justo los libres de cuadrados
y los generados por variables, respectivamente. Ahora bien, los ideales radicales admiten una única descomposición irredundante como intersección de
ideales primos, pues estos deben coincidir con sus primos asociados (ver [AM,
capı́tulo 4] ó [Eis, chapter 3]).
/ ∆, lo que equivale a τ * σ, para
Por otra parte, xτ ∈ I∆ si, y sólo si, τ ∈
todo σ ∈ ∆, es decir, xτ ∈ mσ , para todo σ ∈ ∆.
Teorema 2.7. Dado un complejo simplicial en n vértices, ∆, se verifica que:
!
X Y
xi
HS/I∆ (x) =
.
(1 − xi )
i∈σ
σ∈∆
Demostración. Si para cada a ∈ Nn , definimos supp(a) = {i/ai 6= 0}, entonces
X
X
X
X
Y xi
HS/I∆ (x) =
xa =
xa y
xa =
,
1 − xi
a
i∈σ
σ∈∆
x ∈I
/ ∆
supp(a)=σ
supp(a)=σ
de donde se deduce el resultado.
Corolario 2.8. Dado un complejo simplicial en n vértices, ∆, denotamos
por fi al número de caras de dimensión i de ∆, y d = dim(∆) + 1. Entonces:
HS/I∆ (t) =
d
X
1
fi−1 ti (1 − t)n−i .
(1 − t)n i=0
38
CAPÍTULO 2. COMPLEJOS SIMPLICIALES Y CELULARES
Ejemplo 2.9. Volviendo al triángulo y un punto, es decir, al complejo ∆
formado por los subconjuntos de {1, 2, 3} y {4}, tenemos la descomposición
I∆ = hx1 x4 , x2 x4 , x3 x4 i = hx1 , x2 , x3 i ∩ hx4 i, y:
HS/I∆ (x1 , x2 , x3 , x4 ) =
+
x3
x4
x1
x2
+
+
+
+
(1 − x1 ) 1 − x2 1 − x3 1 − x4
x1 x2
x2 x3
x3 x1
+
+
+
(1 − x1 )(1 − x2 ) (1 − x2 )(1 − x3 ) (1 − x3 )(1 − x1 )
+
x1 x2 x3
.
(1 − x1 )(1 − x2 )(1 − x3 )
El vector f = (f−1 , f0 , f1 , . . . , fd−1 ) se suele denominar en la literatura f vector. Dicho vector, junto al h-polinomio, que es el que surge al escribir
HS/I (t) = h(t)/(1 − t)e , con h(1) 6= 0, juegan un papel combinatorio muy
importante, y que ha sido extensamente estudiado por Stanley.
Pasemos ahora a construir complejos de módulos a partir de complejos
simpliciales. En principio, la construcción será la estándar en topologı́a algebraica, que se encuentra con todo detalle en [Rot, Chapter 7]. Sin embargo,
nosotros seguiremos dos construcciones, la clásica para coeficientes en el cuerpo k, y otra adaptada a nuestros propósitos, en la que los coeficientes estarán
en el anillo S, como se hace en [MS, Chapter 1], y que consiste en multigraduar u “homogeneizar” el complejo sobre k, como se indica con detalle en
[Pee, Section 55]. Esta construcción se introdujo en el artı́culo [BPS].
Para definir los siguientes complejos de módulos, es necesario ordenar
los vértices de un complejo simplicial (es decir, orientar el complejo). Por
ello, supondremos siempre que ∆ será un complejo simplicial abstracto de
dimensión d en los r vértices {1, 2, . . . , r}, y consideraremos su orden natural.
Definición 2.10. Denotamos por Γi (∆) (ó simplemente Γi si no hay confusión) al conjunto de caras de ∆ de dimensión i, i ≥ −1, y denotamos por
k Γi al k-espacio vectorial de base Γi , donde denotamos simplemente por σ
al vector de la base asociado a σ ∈ Γi . Se define entonces el complejo de
cadenas (aumentado) de ∆ sobre k como el complejo:
∂1
∂0
∂d
e
C(∆,
k) ≡ 0 −→ k Γd −→ k Γd−1 −→ . . . −→ k Γ1 −→
k Γ0 −→
k Γ−1 −→ 0,
2.1. COMPLEJOS SIMPLICIALES
39
donde la diferencial es:
∂i (σ) =
i
X
(−1)p (σ \ jp ),
p=0
si σ = {j0 , j1 , . . . , ji }, y donde ∂0 (σ) = 1 = ∅. Y definimos su homologı́a
e i (∆, k) = ker(∂i )/Im(∂i+1 ).
reducida i-ésima como H
Por otro lado, dados monomios m1 , . . . , mr ∈ S, definimos el complejo
de cadenas etiquetado asociado a ∆ y m1 , . . . , mr , como el complejo:
∂
∂d+1
∂
2
1
F∆ ≡ 0 −→ Fd+1 −→ Fd −→ . . . −→ F2 −→
F1 −→
F0 −→ 0,
donde Fi es el S-módulo libre de base Γi−1 , cuyos elementos denotamos igualmente por σ, multigraduado por mdeg(σ) = mcm{mj /j ∈ σ}, y cuya diferencial es:
∂i+1 (σ) =
i
X
p=0
(−1)p
mcm(mj0 , . . . , mji )
(σ \ jp ),
mcm(mj0 , . . . , m
d
jp , . . . , mji )
si σ = {j0 , j1 , . . . , ji }, y donde ∂1 ({p}) = mp = mp ∅.
La comprobación de que ∂i−1 ∂i = 0 en ambos casos es rutinaria, se
procede como en el complejo de Koszul ([Mar, proposición 2.25]). Si σ =
{j0 , j1 , . . . , ji } ∈ Γi , entonces:
X
fp,s (σ \ {jp , js }),
∂i−1 ∂i (σ) =
p6=s
y en ambos casos, al quitar primero jp y después js obtenemos el mismo
coeficiente que al quitar primero js y después jp , pero con signo contrario.
Es decir, fp,s = −fs,p , de donde la suma anterior es cero.
Observación 2.11. Hemos utilizado un convenio de ı́ndices bastante extendido en la literatura (ver [MS] o [Pee]), donde el complejo de cadenas
e
C(∆,
k) tiene base Γi en grado homológico i, mientras que F∆ tiene base Γi−1
en grado homológico i. Esto es debido a que en el primer caso nos interesa
representar por i la dimensión de las caras correspondientes, mientras que
en el segundo caso, nos interesa representar por i el número de vértices
de los sı́mplices.
40
CAPÍTULO 2. COMPLEJOS SIMPLICIALES Y CELULARES
Básicamente, lo que hemos hecho es considerar el complejo de cadenas
clásico sobre k, y etiquetar al complejo simplicial con multigrados, provenientes de ciertos monomios, para formar un complejo multigraduado sobre
S. El primero encierra información puramente topológica de ∆, mientras que
el segundo proporciona un complejo sobre el ideal I = hm1 , . . . , mr i. Lo que
haremos en un contexto más general en la siguiente sección será relacionar
ambos para saber cuándo son exactos y obtener ası́ resoluciones de ideales
monomiales. Esto motiva la siguiente definición:
Definición 2.12. Sean I ⊂ S un ideal monomial generado por los monomios
m1 , . . . , mr ∈ S y ∆ un complejo simplicial en r vértices. Si F∆ es exacto
salvo en grado homológico i = 0, se dice que es una resolución simplicial
de S/I.
Ejemplo 2.13. Tomemos de nuevo el complejo simplicial ∆ del ejemplo
2.9, que tiene cuatro vértices. Consideremos en S = k[x, y, z] el ideal I =
hx2 , xy, y 2 , xzi. Con dicho orden, ∆ quedarı́a etiquetado como en la figura:
x2
x2 y
x2 y 2
x2 y 2
y2
xz
xy 2
xy
Figura 2.3:
Si ordenamos los sı́mplices de dimensión 1 de ∆ de la siguiente forma:
{2, 3}, {3, 1}, {1, 2} y el resto en la forma obvia, y escribimos las diferenciales
en forma matricial, obtenemos que F∆ es el complejo:
x
−1
y
2 2
0 −→ S(x y ) −→ S(xy 2 ) ⊕ S(x2 y 2 ) ⊕ S(x2 y)
−→ S(x2 ) ⊕ S(xy) ⊕ S(y 2 ) ⊕ S(xz)
0
y2
y
y
0 −x
−x −x2 0
0
0
0
−→
x2 xy y 2 xz
−→
S −→ 0.
2.2. COMPLEJOS CELULARES
41
Vemos que dicho complejo no es exacto, debido a que el elemento (z, 0, 0, −x),
en grado homológico 1, tiene imagen nula, y no está en la imagen de la diferencial anterior. Por otro lado, vemos que aparece una constante en una de
las matrices. Por tanto, incluso si los generadores del ideal son minimales,
vemos que un complejo de módulos dado por un complejo simplicial no tiene
por qué ser exacto, ni cumplir la condición de minimalidad ∂i (Fi ) ⊂ mFi−1 .
2.2.
Complejos celulares
El punto de partida de las resoluciones celulares, que generalizan el proceso descrito en 2.10, se encuentra en [BStu]. En esta sección daremos las
definiciones y resultados básicos que relacionan los complejos celulares y las
resoluciones monomiales.
Tradicionalmente en Topologı́a Algebraica, se ha intentado buscar un
tipo de objeto que generalice a los bien conocidos complejos simpliciales.
Un primer paso fueron los politopos y los complejos polihedrales que surgen a partir de ellos. Sin embargo, ciertos problemas requerı́an un grado de
generalización mayor, para lo cual J.H.C. Whitehead definió el concepto de
complejo celular o CW. Sin embargo, nosotros nos quedaremos a medio
camino entre los complejos polihedrales y los CW, que son los complejos
celulares regulares, los cuales denominaremos celulares a secas.
Definición 2.14. Llamaremos politopo en Rd a la clausura convexa de una
cantidad finita de puntos. Diremos que v1 , . . . , vr ∈ Rd son los vértices del
politopo P si este es la clausura convexa de todos ellos, y ninguno está en la
clausura convexa del resto. Escribiremos V (P) = {v1 , . . . , vr }, y definiremos
su dimensión, dim(P), como la dimensión del subespacio afı́n generado por
sus vértices. Llamaremos caras de P a las clausuras convexas de subconjuntos de V (P) que sean de la forma H ∩ P, donde H es un hiperplano de Rd
y P está contenido en uno de los semiespacios que determina. Convenimos
que el vacı́o es una cara de todo politopo.
Un complejo celular polihedral (o simplemente polihedral), X, es una
colección de politopos (llamados caras de X) en cierto Rd , que verifican:
1. Si P ∈ X, entonces todas sus caras están en X.
42
CAPÍTULO 2. COMPLEJOS SIMPLICIALES Y CELULARES
2. Si P, Q ∈ X, entonces P ∩ Q es una cara de ambos.
Es decir, los conceptos de politopo y complejo polihedral generalizan en su
forma geométrica los de sı́mplice y complejo simplicial. El término polihedro
se utiliza en la literatura para denotar a los subconjuntos de Rd que son
intersección de una cantidad finita de semiespacios, y se puede probar que
entonces los politopos son justo los polihedros acotados (ver [BH, section
5.2]).
Por otro lado, en la definición de cara de un politopo, es superfluo que
sean la clausura convexa de un subconjunto de vértices: se puede ver que
todo subconjunto de un politopo P de la forma H ∩ P, donde P está en un
semiespacio determinado por H, es la clausura convexa de un subconjunto
de V (P). Véase la figura 2.4.
H1
H2
P
Figura 2.4: Caras de un politopo.
Una generalización, no tan abstracta como la de complejo CW, es la
siguiente:
Definición 2.15. Un complejo celular (regular) es un par X = (|X|, Γ),
donde |X| es un espacio topológico de Hausdorff y Γ una colección finita de
subconjuntos suyos, llamados caras o células abiertas, tales que:
1. |X| =
S
Γ.
2. Si e, e0 ∈ Γ son distintos, entonces e ∩ e0 = ∅.
3. Para todo e ∈ Γ no vacı́o, existe un homeomorfismo fe : B i −→ e, que
se restringe a un homeomorfismo fe : Bi −→ e, donde Bi es la bola
2.2. COMPLEJOS CELULARES
43
euclı́dea unidad (en Ri ) de dimensión i ≥ 0, y E indica la adherencia
de E.
4. ∅ ∈ Γ.
Se dice que e ∈ Γ tiene dimensión i, y se escribe dim(e) = i, si e es
homeomorfo a Bi . Denotamos por Γi al conjunto de caras de X de dimensión
i y llamamos vértices de X a las caras de dimensión cero, donde escribimos
V (X) = Γ0 . Convenimos que Γ−1 = {∅}. Definimos la dimensión de X
como dim(X) = máx{i/Γi 6= ∅}.
Por otro lado, dados e, e0 ∈ Γ, se dice que e es una cara (resp. propia)
de e0 si e ⊂ e0 (resp. si además, e 6= e0 ). Se dice que Y = (|Y |, ∆) es un
subcomplejo de X si |Y | ⊂ |X| es cerrado y tiene la topologı́a inducida, y
∆ ⊂ Γ.
Tras estas definiciones, haremos varios comentarios. Primero, la dimensión de una cara de X está bien definida, pues Bi ∼
= Bj sólo si i = j (gracias
al teorema de invarianza del dominio [Rot, theorem 6.36] o quitando un
punto a ambos y hallando la homologı́a singular [Rot, theorem 6.8]). Por
otro lado, si e es una cara propia de e0 , debe ser dim(e) < dim(e0 ) (de nuevo
por invarianza del dominio, ver [Rot, exercise 6.20]). Además, por convenio definimos R0 = {0} y B0 = {0}, por lo que los vértices son conjuntos
unipuntuales.
Por otra parte, dar un subcomplejo de un complejo X es equivalente a
dar una subcolección ∆ ⊂ Γ tal que, siSe ∈ Γ es una cara de e0 ∈ ∆, entonces
e ∈ ∆ (en tal caso, se definirı́a |Y | = ∆).
Por último, los complejos polihedrales realmente generalizan a los simpliciales, y a su vez, los celulares a los polihedrales. Dejamos recogidos estos
hechos en la siguiente proposición, cuya demostración omitimos por sencillez:
Proposición 2.16. Todo sı́mplice en Rd es un politopo y, por tanto, todo
complejo simplicial geométrico es un complejo polihedral. Por
S otro lado, todo
complejo polihedral X es un complejo celular, donde |X| = X, y sus células abiertas son los politopos de X, sustrayendo de ellos sus caras propias.
Además, los conceptos de vértice, cara y dimensión, coinciden salvo que una
cara de un complejo simplicial o polihedral es la adherencia de una cara del
complejo celular correspondiente.
44
CAPÍTULO 2. COMPLEJOS SIMPLICIALES Y CELULARES
Antes de continuar, conviene tener en cuenta las siguientes propiedades,
triviales para complejos simpliciales, sencillas para polihedrales, y cuya demostración para complejos celulares requiere de nuevo el uso del teorema de
invarianza del dominio (ver [Mas, section IV.6, (1) y (3)]):
Lema 2.17. Dado un complejo celular X = (|X|, Γ), e, e0 ∈ Γ, se verifica:
1. Si dim(e) < dim(e0 ) y e ∩ (e0 \ e0 ) 6= ∅, entonces e es una cara de e0 .
2. Si e es una cara de e0 y dim(e0 ) − dim(e) = 2, entonces existen exactamente dos caras e1 , e2 ∈ Γ, tales que e es una cara propia de ambas
y ambas son caras propias de e0 . En particular, dim(e1 ) = dim(e2 ) =
dim(e) + 1 = dim(e0 ) − 1.
En particular, toda cara e ∈ Γ, de dimensión dim(e) > 0, tiene al menos dos
vértices como caras suyas.
Este lema nos permite considerar funciones de incidencia, necesarias para
definir la homologı́a celular:
Definición 2.18. Dado un complejo celular X = (|X|, Γ), una función de
incidencia sobre X es una aplicación
: {(e, e0 ) ∈ Γ2 / dim(e0 ) − dim(e) = 1} −→ {0, 1, −1}
tal que:
1. (e, e0 ) 6= 0 si, y sólo si, e es una cara de e0 .
2. (∅, e) = 1, para todo vértice e ∈ Γ0 .
3. Si e, e0 ∈ Γ son tales que e es una cara de e0 y dim(e0 ) − dim(e) = 2,
entonces
(e, e1 )(e1 , e0 ) + (e, e2 )(e2 , e0 ) = 0,
para las dos caras propias e1 , e2 de e0 que contienen a e.
El concepto de función de incidencia formaliza el de orientación relativa. Es decir, indica cuándo una cara lo es de otra (por la propiedad 1), y en
caso afirmativo, indica si la orientación de la cara mayor induce la de la cara
menor (mediante un signo positivo o negativo). El siguiente lema, que no
demostraremos (ver [Mas, section IV.5 y lemma IV.7.1]), es necesario para
que la definición de homologı́a celular sea consistente.
2.2. COMPLEJOS CELULARES
45
Lema 2.19. Para cualquier complejo celular existe al menos una función de
incidencia.
Definición 2.20. Sea X = (|X|, Γ) un complejo celular de dimensión d.
Denotamos por k Γi al k-espacio vectorial de base Γi . Se define entonces el
complejo de cadenas (aumentado) de X sobre k como el complejo:
∂1
∂0
∂d
e
k Γ0 −→
k Γ−1 −→ 0,
C(X,
k) ≡ 0 −→ k Γd −→ k Γd−1 −→ . . . −→ k Γ1 −→
donde la diferencial es:
∂i (e) =
X
(e0 , e)e0 ,
e0 ∈Γi−1
e i (X, k) = ker(∂i )/Im(∂i+1 ),
y definimos su homologı́a reducida i-ésima como H
para −1 ≤ i ≤ d.
Por otro lado, dados monomios m1 , . . . , mr ∈ S, definimos el complejo
de cadenas etiquetado asociado a X y m1 , . . . , mr , como el complejo:
∂
∂d+1
∂
2
1
FX ≡ 0 −→ Fd+1 −→ Fd −→ . . . −→ F2 −→
F1 −→
F0 −→ 0,
donde Fi es el S-módulo libre de base Γi−1 , V (X) = {v1 , . . . , vr }, multigraduado por mdeg(e) = me = mcm{mj /vj ∈ e} (tiene sentido por 2.17), y
cuya diferencial es:
X
(e0 , e)(me /me0 )e0 .
∂i+1 (e) =
e0 ∈Γi−1
De nuevo, se verifica que ∂i−1 ∂i = 0, donde la demostración es la misma que para el caso de complejos simpliciales, donde ahora se utilizan las
propiedades de la función de incidencia.
Se observará que hemos definido el complejo de cadenas de X utilizando
una función de incidencia, sin especificar cuál. Se puede demostrar que para
dos de estas funciones cualesquiera, obtenemos un isomorfismo canónico entre ambos complejos de cadenas (ver [BH, theorem 6.2.2] y [Mas, theorem
IV.7.2]).
De nuevo, lo que hemos hecho es considerar dos complejos de módulos
construidos a partir de X. Uno, no etiquetado, y que guarda la información
topológica de X, y otro, etiquetado, que proporciona un complejo sobre el
ideal I = hm1 , . . . , mr i. Esto generaliza la construcción 2.10:
46
CAPÍTULO 2. COMPLEJOS SIMPLICIALES Y CELULARES
Proposición 2.21. Dado un complejo simplicial abstracto ∆ en los vértices
e su realización geométrica en Rr (ver 2.2), y cuyos vértices
{1, 2, . . . , r}, ∆
{v1 , v2 , . . . , vr } se corresponden en orden con los de ∆, se tiene que la asignación
(σ, σ \ jp ) = (−1)p ,
donde σ = {j0 , j1 , . . . , ji } ∈ ∆, define una función de incidencia para el
e y los complejos de cadenas definidos en 2.10 para ∆
complejo celular ∆,
e y .
coinciden con los definidos en 2.20 para ∆
Definición 2.22. Sean I ⊂ S un ideal monomial generado por los monomios
m1 , . . . , mr ∈ S y X = (|X|, Γ) un complejo celular de r vértices. Si FX es
exacto salvo en grado homológico i = 0, se dice que es una resolución
celular de S/I.
Observación 2.23. Dada esta definición, surgen varias preguntas. Por un
lado, nos preguntamos si todo ideal monomial admite una resolución celular.
La respuesta es afirmativa, y de hecho, la resolución de Taylor, que veremos
en la siguiente sección, proporciona una resolución simplicial para todo ideal
monomial.
Por otro lado, nos preguntamos si hay ideales monomiales cuya resolución
minimal sea simplicial, celular pero no simplicial, o ninguna de las dos cosas.
Los tres casos pueden ocurrir. La resolución minimal del ideal m es el complejo
de Koszul K(x1 , . . . , xn ), que, como veremos en el siguiente capı́tulo, coincide
con la resolución de Taylor y, por tanto, es simplicial. Al final de la sección
3.4 veremos un ejemplo de ideal fuertemente estable cuya resolución minimal
es polihedral pero no simplicial. Y por último, en [Vel] se dan ejemplos de
ideales monomiales cuya resolución minimal no es celular.
Dado un complejo celular X = (|X|, Γ) etiquetado por los monomios
m1 , . . . , mr ∈ S, y a ∈ Nn tal que xa ∈ I, denotaremos por X≺a y Xa a los
subcomplejos celulares dados por las caras con multigrados b ≺ a y b a,
respectivamente, donde a b si, y sólo si, ai ≤ bi , para cada i. Obviamente,
/ I. Un criterio sencillo de
ninguna cara de X tiene multigrado a si xa ∈
exactitud es el siguiente:
Lema 2.24. Dado un complejo celular X y unos monomios m1 , . . . , mr ∈ S,
FX es una resolución celular de S/I (para I = hm1 , . . . , mr i) si, y sólo si,
Xa es acı́clico (su homologı́a reducida es nula), para cada a ∈ Nn tal que
xa ∈ I.
2.2. COMPLEJOS CELULARES
47
Demostración.
Como FX es multigraduado, su homologı́a verifica Hi (FX ) =
L
a Hi (FX )a , y Hi (FX )a = Hi (FX,a ), donde FX,a es el subcomplejo de kespacios vectoriales de FX formado por los elementos de multigrado a. Por
tanto, vemos que FX es exacto en grado homológico i si, y sólo si, FX,a
también lo es, para cada a ∈ Nn .
Ahora bien, se ve fácilmente que FX,a es un complejo canónicamente
e a , k), cuando xa ∈ I, que siempre tiene homologı́a nula
isomorfo a C(X
en i = 0. Observemos que la homologı́a que aparece en FX , para el grado
homológico i = 0, proviene precisamente de los multigrados a que verifican
que xa ∈
/ I.
Por otro lado, la información topológica de los complejos celulares, junto
con su etiquetado, proporcionan también algunos invariantes de los ideales
monomiales que resuelven:
Teorema 2.25. Sea FX una resolución celular de S/I, para un ideal monomial I ⊂ S. Entonces:
e i−1 (X≺a , k)),
βi,a (I) = dimk (H
si xa ∈ I, y βi,a (I) = 0 en otro caso.
Demostración. Si xa ∈
/ I, es claro que βi,a (I) = 0. Si xa ∈ I, utilizaremos
la caracterización en términos de Tor (proposición 1.6). Se ve fácilmente que
e a , k)i por C(X
e ≺a , k)i , es decir, tenemos
(FX ⊗S k)i,a es el cociente de C(X
la sucesión exacta corta:
e ≺a , k) −→ C(X
e a , k) −→ (FX ⊗S k)a −→ 0.
0 −→ C(X
Por el lema anterior, Xa es acı́clico, por lo que el resultado se deduce tomando la sucesión exacta larga en homologı́a (ver [Mar, teorema 2.3]).
Y en cuanto a la serie de Hilbert, esta queda determinada por la versión
multigraduada de la bien conocida caracterı́stica de Euler de un complejo
simplicial o celular:
Definición 2.26. Dado un complejo celular X = (|X|, Γ) etiquetado por los
monomios m1 , . . . , mr ∈ S, se define su caracterı́stica de Euler multigraduada como el polinomio:
X
χ(X; x1 , . . . , xn ) =
(−1)1+dim(e) me ,
e∈Γ
48
CAPÍTULO 2. COMPLEJOS SIMPLICIALES Y CELULARES
donde me = mcm{mj /vj es un vértice de e}.
Si tomamos la definición
P usuali de caracterı́stica de Euler (ver [Rot, páginas 145 y 221]), χ(X) = i (−1) fi (X), donde fi (X) es el número de caras
de X de dimensión i, obtenemos que:
χ(X) = −χ(X; 1, . . . , 1).
Teorema 2.27. Sea X un complejo celular etiquetado por los monomios
m1 , . . . , mr ∈ S, y sea I = hm1 , . . . , mr i. Si FX es una resolución celular de
S/I, entonces:
HS/I (x1 , . . . , xn ) =
χ(X; x1 , . . . , xn )
.
(1 − x1 ) · · · (1 − xn )
Demostración. Tenemos que
χ(X; x1 , . . . , xn )
=
(1 − x1 ) · · · (1 − xn )
!
X
(−1)1+dim(e)
e∈Γ
X
me xa .
a∈Nn
Ahora bien, para cada multigrado b, si hallamos dimk ((S/I)b ) mediante una
suma alternada para FX,b , obtenemos que:
X
dimk ((S/I)b ) =
(−1)1+dim(e) ,
para los e ∈ Γ tales que me divide a xb , de donde se deduce el resultado.
2.3.
La resolución de Taylor
En esta sección construiremos la resolución de Taylor, que consiste en
el ejemplo más sencillo de resolución celular. De hecho, es una resolución
simplicial construida a partir de un sı́mplice, y puede aplicarse a cualquier
ideal monomial. Su principal desventaja es que no sólo no será minimal en
la mayorı́a de los casos, sino que su longitud coincide con el número de
generadores monomiales elegido para el ideal que resuelve, y por tanto puede
ser muy grande, alejándose de la cota que proporciona el teorema de las
sicigias de Hilbert y que es el número de variables, n (ver [Mar, teorema
1.48]).
2.3. LA RESOLUCIÓN DE TAYLOR
49
Por otro lado, el complejo de Koszul ([Mar, sección 2.4]) construido
a partir de una sucesión S-regular de monomios será un caso particular de
resolución de Taylor. Esta nueva interpretación del complejo de Koszul sugiere definir un complejo simplicial de Koszul asociado al ideal monomial
de partida para hallar sus números de Betti de forma similar a 1.7.
Definición 2.28. Sea I ⊂ S un ideal monomial generado por los monomios
m1 , . . . , mr ∈ S. Definimos la resolución de Taylor de S/I asociada a los
generadores m1 , . . . , mr como TI , el complejo de cadenas etiquetado asociado
a ∆ y m1 , . . . , mr , donde ∆ es el complejo simplicial (r − 1)-dimensional
formado por todos los subconjuntos de {1, 2, . . . , r} (es decir, un “sı́mplice
lleno”).
En principio, TI depende del sistema de generadores elegido, pero no
haremos referencia a estos a no ser que sea necesario. Podemos describir
explı́citamente dicho complejo de forma análoga al complejo de Koszul, utilizandoVproductos exteriores, debido a la simple estructura de ∆: Definimos
TI,i = i (S r ), y podemos tomar como base multigraduada
ej1 ∧ . . . ∧ eji , donde mdeg(ej1 ∧ . . . ∧ eji ) = mcm{mj1 , . . . , mji },
siempre que 1 ≤ j1 < j2 < . . . < ji ≤ r, e i ≤ r. La diferencial de TI en esta
base tiene la siguiente expresión:
∂i (ej1 ∧. . .∧eji ) =
i
X
p=1
(−1)p+1
mcm(mj1 , . . . , mji )
(ej1 ∧. . .∧ec
jp ∧. . .∧eji ).
mcm(mj1 , . . . , m
d
jp , . . . , mji )
Antes de comprobar su exactitud, veamos que el complejo de Koszul es
un caso particular (recordemos de [Mar, sección 2.4] la definición de sucesión
regular y complejo de Koszul asociado):
Teorema 2.29. Sea m = (m1 , . . . , mr ) una sucesión S-regular de monomios
de S. Entonces (K(m), d) = (TI , ∂), donde (K(m), d) es el complejo de
Koszul asociado a m, e I = hm1 , . . . , mr i. Además, es su resolución libre
minimal multigraduada.
Demostración. Se deduce de la descripción anterior en términos de productos
exteriores. Observemos que m es S-regular si, y sólo si, los monomios mi no
comparten variables, lo que equivale a mcm{mj1 , . . . , mji } = mj1 · · · mji , si
1 ≤ j1 < j2 < . . . < ji ≤ r, e i ≤ r. El hecho de que sea minimal es obvio,
pues se cumple la condición ∂i+1 (TI,i+1 ) ⊂ mTI,i .
50
CAPÍTULO 2. COMPLEJOS SIMPLICIALES Y CELULARES
Observación 2.30. Podemos decir más. Sabemos también que m es Sregular si, y sólo si, K(m) es exacto (por [Mar, teorema 2.30]), y como
veremos a continuación, TI siempre lo es. Por tanto, vemos que de hecho,
K(m) = TI si, y sólo si, m es S-regular. En cuanto a lo que comentábamos
antes sobre la longitud de TI , sabemos que es justo el número de generadores
escogidos, y la resolución minimal de I tiene longitud a lo sumo n. Ahora
bien, si m es S-regular, al no compartir variables, debe ser r ≤ n, por lo que
no entramos en ninguna contradicción (ver también el ejemplo 1.11).
Ahora, para ver su exactitud, utilizamos el criterio 2.24 y observamos
que, para cada a ∈ Nn tal que xa ∈ I, ∆a es el complejo simplicial formado
por todos los subconjuntos de {j/mj divide a xa }, por lo que vuelve a ser un
“sı́mplice lleno”. Procedemos ahora de dos formas.
Un argumento topológico serı́a el siguiente: podemos aplicar directamente [Rot, corollary 7.18], que dice sı́mplemente que estos complejos son
acı́clicos, o ver que su homologı́a reducida coincide con la homologı́a singular
de |∆| (por [Rot, theorem 7.22], para una realización geométrica cualquiera
de ∆), que es un subconjunto convexo de cierto Rd y por tanto tiene homologı́a singular nula (por [Rot, theorem 4.19]).
Pero también podemos dar un argumento algebraico: podemos aprovechar lo que conocemos del complejo de Koszul K(x1 , . . . , xn ). Sabemos que
es multigraduado y exacto (ver 1.7). Ahora bien, K(x1 , . . . , xn ) = Tm para
los generadores x1 , . . . , xn de m, y para cada r ≤ n, ∆x1 ···xr es el complejo
simplicial formado por todos los subconjuntos de {1, 2, . . . , r}, y es acı́clico
por 2.24.
Es decir, aunque el complejo K(x1 , . . . , xn ) sea un caso muy particular
de resolución de Taylor, conocer su exactitud equivale a conocer la exactitud
de todas las resoluciones de Taylor posibles. En el capı́tulo 3 veremos otra
demostración.
Aunque la resolución de Taylor no sea minimal, permite obtener algunas
cotas (poco ajustadas en general) para los números de Betti. Recogemos estos
hechos en la siguiente proposición, que se deducen directamente de la propia
resolución:
Proposición 2.31. Sea I ⊂ S un ideal monomial generado por los monomios
m1 , . . . , mr ∈ S. Entonces,
2.3. LA RESOLUCIÓN DE TAYLOR
51
S
1. βi,a
(S/I) = 0, si xa no divide a mcm{m1 , . . . , mr }.
S
2. Si I es libre de cuadrados, entonces βi,a
(S/I) = 0 si xa no es libre de
cuadrados.
3. reg(S/I) ≤ deg(mcm{m1 , . . . , mr }).
En los apartados 1 y 3, se pueden ajustar las cotas tomando como m1 , . . . , mr
el sistema minimal de generadores monomiales de I.
Observación 2.32. El apartado 2 asegura que los números de Betti multigraduados no nulos de un ideal libre de cuadrados caen en multigrados que
son libres de cuadrados. Observamos que, de la descripción de la resolución de
Eliahou-Kervaire libre de cuadrados de la sección 1.5, los ideales estables
libres de cuadrados son un ejemplo no trivial de este hecho.
Por último, introduciremos el complejo simplicial de Koszul asociado
a un ideal monomial. Dicho complejo simplicial permite calcular los números
de Betti de dicho ideal, en analogı́a a cómo lo permite el complejo de Koszul
K(x1 , . . . , xn ) tensorizado con dicho ideal (ver 1.7).
Definición 2.33. Sea I ⊂ S un ideal monomial, y sea a ∈ Nn un multigrado.
Se define el complejo simplicial de Koszul asociado a I en multigrado a
como:
K a (I) = {σ ⊂ {1, 2, . . . , n}/xa−σ ∈ I},
Q
ai
donde xa−σ = i∈σ
/ xi , como en 2.4.
Teorema 2.34. Dado un ideal monomial I ⊂ S y a ∈ Nn , se tiene:
e i−1 (K a (I), k)).
β S (I) = dimk (H
i,a
Demostración. Primero, por 1.7, tenemos que
S
βi,a
(I) = dimk (Hi (K(x1 , . . . , xn ) ⊗ I)a ).
Ahora veamos que los complejos de k-espacios vectoriales (K(x1 , . . . , xn )⊗I)a
e a (I), k) son canónicamente isomorfos, salvo por el correspondiente
y C(K
desfase en grado homológico (según 2.11):
Primero, una base de (K(x1 , . . . , xn ) ⊗ I)a,i la forman los elementos (ej1 ∧
. . . ∧ eji ) ⊗ xb , donde, si τ = {j1 , . . . , ji }, entonces xb = xa−τ ∈ I. Estos
se corresponden con los sı́mplices que aparecen en K a (I). Por otro lado, es
claro de sus definiciones, que ambas diferenciales coinciden en dichas bases.
Por lo tanto, ambos complejos son isomorfos.
52
2.4.
CAPÍTULO 2. COMPLEJOS SIMPLICIALES Y CELULARES
La resolución de Eliahou-Kervaire
En esta sección no demostraremos que la resolución de Eliahou-Kervaire
realmente es un complejo exacto, pero hallaremos los números de Betti multigraduados (y por tanto el resto de invariantes que aparecen en 1.36) de un
ideal fuertemente estable viendo que coinciden con los del módulo inicial del
módulo de sus primeras sicigias, para ciertos órdenes monomiales. Esto da
una información complementaria, ya que indica que el módulo de primeras
sicigias de un ideal fuertemente estable verifica la igualdad en 1.23.
Para llegar a este objetivo, veremos qué propiedades verifican los complejos simpliciales de Koszul de un ideal fuertemente estable. Para este estudio
necesitamos algunas nociones técnicas sobre complejos simpliciales, que desarrollaremos según sea necesario para nuestros propósitos.
Definición 2.35. Sean ∆0 ⊂ ∆ dos complejos simpliciales. Definimos el
complejo de cadenas relativo al par (∆0 , ∆) como el complejo:
0
∂i
e 0 , ∆, k) ≡ . . . −→ k Γi (∆)\Γi (∆0 ) −→
k Γi−1 (∆)\Γi−1 (∆ ) −→ . . . ,
C(∆
0
es decir, el complejo formado por los cocientes k Γi (∆) /k Γi (∆ ) , con las diferenciales inducidas. Se define entonces la homologı́a relativa i-ésima del par
e i (∆0 , ∆) = ker(∂ i )/Im(∂ i+1 ).
(∆0 , ∆) como H
Es sencillo ver que dicho complejo de k-espacios vectoriales está bien
definido, y de hecho tenemos la sucesión exacta corta natural:
e 0 , k) −→ C(∆,
e
e 0 , ∆, k) −→ 0,
0 −→ C(∆
k) −→ C(∆
que induce la sucesión exacta larga en homologı́a (por [Mar, teorema 2.3]):
e i+1 (∆0 , ∆) −→ H
e i (∆0 ) −→ H
e i (∆) −→ H
e i (∆0 , ∆) −→ H
e i−1 (∆0 ) −→ . . .
. . . −→ H
Otro par de conceptos técnicos que necesitaremos son los siguientes:
Definición 2.36. Sea ∆ un complejo simplicial en los vértices {1, 2, . . . , r}.
Decimos que es desfasado o shifted si verifica la siguiente condición: Para
todos 1 ≤ i < j ≤ r, y para toda cara σ ∈ ∆ con i ∈ σ, se verifica
(σ \ i) ∪ j ∈ ∆. Por otro lado, considerando un vértice más, r + 1, definimos
el cono de ∆ desde el vértice r + 1 como el complejo simplicial:
(r + 1) ∗ ∆ = {σ ∪ {r + 1}/σ ∈ ∆}.
2.4. LA RESOLUCIÓN DE ELIAHOU-KERVAIRE
53
La formación del cono sobre un complejo simplicial es la usual en topologı́a.
Véase la figura 2.5.
r+1
(r + 1) ∗ ∆
∆
Figura 2.5: Cono sobre ∆.
Los complejos simpliciales de Koszul de un ideal fuertemente estable serán
desfasados, y es por lo que introducimos esta noción. Necesitaremos la siguiente propiedad que cumplen este tipo de complejos:
Lema 2.37. Sea ∆ un complejo simplicial desfasado en los vértices {1, 2, . . . , r},
y sea ∆0 ⊂ ∆ el subcomplejo formado por las caras de ∆ que no tienen a r
e i (∆, k)) es el número de caras maximales, σ,
como vértice. Entonces, dimk (H
0
de dimensión i de ∆ tales que σ ∪ r no es una cara de ∆. Es decir:
e i (∆, k)) = #(Γi+1 (r ∗ ∆0 ) \ Γi+1 (∆)).
dimk (H
Demostración. Obviamente ∆ ⊂ r ∗ ∆0 , por lo que podemos considerar la
homologı́a relativa de dicho par. Por la sucesión exacta larga correspondiente,
tenemos para cada i la sucesión exacta
e i+1 (r ∗ ∆0 ) −→ H
e i+1 (r ∗ ∆0 , ∆) −→ H
e i (∆) −→ H
e i (r ∗ ∆0 ).
H
Ahora bien, si tomamos la realización geométrica estándar, vemos que |r ∗∆0 |
es un espacio contráctil, de hecho, es el cono sobre |∆0 | según la definición
usual en topologı́a, que sabemos que es contráctil ([Rot, theorem 1.11]),
y como ya habı́amos comentado, su homologı́a reducida coincide con su homologı́a singular ([Rot, theorem 7.22]) y esta es nula por ser contráctil ([Rot,
corollary 4.25]). En resumen, juntando esto con la sucesión exacta anterior,
e i (∆) ∼
e i+1 (r ∗ ∆0 , ∆).
obtenemos que H
=H
54
CAPÍTULO 2. COMPLEJOS SIMPLICIALES Y CELULARES
Por otro lado, como ∆ es desfasado, se comprueba fácilmente que, en
e 0 , ∆, k), la diferencial es nula, ya que, si σ ∈ ∆0 ,
el complejo relativo C(∆
entonces todas las caras de σ ∪ r están en ∆. Por lo tanto,
e i+1 (r ∗ ∆0 , ∆)) = dimk (k Γi+1 (r∗∆0 ) /k Γi+1 (∆) ),
dimk (H
de donde se deduce el resultado.
Ya disponemos de las herramientas combinatorias necesarias para continuar con nuestro estudio. En el resto de la sección, fijaremos I ⊂ S un
ideal fuertemente estable, {m1 , . . . , mr } su sistema minimal de generadores
monomiales y M ⊂ S r el primer módulo de sicigias de I, es decir, según la
notación de [Mar, secciones 1.3 y 1.5], M = Sic(m1 , . . . , mr ) = Sic1 (I).
Por comodidad, denotaremos ui = máx(mi ), y ordenaremos los monomios
mi de forma que, si i > j, entonces ui ≤ uj y deguj (mi ) ≤ deguj (mj ), donde
degu indica el grado de un monomio respecto de la variable xu .
En los siguientes resultados utilizamos la notación de [Mar, capı́tulo 3]
sobre órdenes monomiales y bases de Groebner, y la notación de la sección
1.4 sobre ideales fuertemente estables.
Teorema 2.38. El conjunto G = {xu ej −e(xu mj )ei /u < uj y mi = b(xu mj )}
es la base de Groebner reducida de M , para cualquier orden POT, <, en S r
con el orden de los vectores e1 > e2 > . . . > en . En particular:
1. in(M ) =
Lr
i=1 hx1 , x2 , . . . , xuj −1 iej .
S
2. βp,a
(in(M )) es el número de ı́ndices i ∈ {1, 2, . . . , r} tales que xa =
xσ mi , para cierto σ ⊂ {1, 2, . . . , ui − 1} con #σ = p + 1.
Demostración. Lo primero que debemos tener en cuenta es que M ⊂ S r es
un submódulo multigraduado para la multigraduación S(m1 ) ⊕ . . . ⊕ S(mr ),
pero no tiene por qué ser monomial, según lo visto en la sección 1.1.
Ahora, sean 1 ≤ j ≤ r y u < uj . Por el lema 1.35, podemos escribir
xu mj = m0 mi , con mi = b(xu mj ) y m0 = e(xu mj ), y ui ≤ mı́n(m0 ). En
particular vemos que i 6= j, y veamos que de hecho i > j. Claramente,
mı́n(m0 ) ≤ uj , y si tenemos que mı́n(m0 ) < uj , entonces no puede ser j > i
por cómo hemos ordenado los mi , ya que tendrı́amos uj > mı́n(m0 ) ≥ ui y
2.4. LA RESOLUCIÓN DE ELIAHOU-KERVAIRE
55
uj ≤ ui . Y si mı́n(m0 ) = uj , entonces debe ser deguj (mi ) < deguj (mj ), por
ser xu mj = m0 mi , por lo que tampoco puede ser j > i.
En definitiva, xu ej − e(xu mj )ei ∈ M y es una sicigia no nula, por lo que
G ⊂ M . Veamos que es una base de Groebner de M para <. Primero, por
ser el orden POT, tenemos que in(xu ej − e(xu mj )ei ) = xu ej , ya que i > j.
Si G no fuera base de Groebner, por ser I monomial, existirı́a una sicigia no
nula de la forma m00 ej − m0 ei , con m0 , m00 ∈ S monomios, tales que xu el no
divide a m0 ei ni a m00 ej para ningún l y ningún u < ul . Esto implica que
mı́n(m0 ) ≥ ui y mı́n(m00 ) ≥ uj , pero entonces el monomio m = m0 mi = m00 mj
admitirı́a dos descomposiciones distintas como la indicada en el lema 1.35,
lo cual es absurdo.
Finalmente, para ver que G es reducida, basta observar que si i > j y
u < uj , y v < ui , entonces xv ei no divide a e(xu mj )ei , por ser v < ui ≤
mı́n(e(xu mj )).
Ahora, el apartado 1 se deduce de que in(xu ej −e(xu mj )ei ) = xu ej , si i >
j, u < uj . Por tanto, la resolución libre minimal multigraduada de in(M ) es la
suma directa de los correspondientes complejos de Koszul, utilizando en cada
uno la multigraduación dada por mdeg(e0j1 ∧ . . . ∧ e0ji ) = xj1 · · · xji mj , si 1 ≤
j1 < . . . ji ≤ uj − 1, para la correspondiente base canónica {e01 , . . . , e0uj −1 }.
Esto es debido a que estamos dando la multigraduación mdeg(ej ) = mj en
Sr.
Por la expresión que hemos obtenido de los números de Betti multigraS
S
duados de in(M ), vemos que si realmente se verifica βp,a
(in(M )) = βp,a
(M ),
y no sólo la desigualdad en el teorema 1.23, entonces los números de Betti
que surgirı́an de la resolución de Eliahou-Kervaire, si fuera realmente una
resolución, son los correctos. Veamos entonces que se cumple dicha igualdad:
Teorema 2.39. En la situación anterior, para cada a ∈ Nn y cada p ≥ 0,
S
S
βp,a
(in(M )) ≤ βp,a
(M ) y por tanto, son iguales.
S
Demostración. Sea a = (a1 , a2 , . . . , an ) ∈ Nn tal que βp,a
(in(M )) 6= 0, y sea
S
k = máx{i/ai 6= 0}. Por el apartado 2 del teorema anterior, βp,a
(in(M )) es el
número de ı́ndices j ∈ {1, 2, . . . , r} que proporcionan un σ ⊂ {1, 2, . . . , uj −
1} tal que xa = xσ mj y #σ = p + 1. Para cada uno de estos, es claro
que degxk (mj ) = ak , por lo que los sı́mplices anteriores verifican que σ ∈
{1, 2, . . . , k − 1}.
56
CAPÍTULO 2. COMPLEJOS SIMPLICIALES Y CELULARES
S
S
e p (K a (I))).
Por otro lado, por 2.34, tenemos βp,a
(M ) = βp+1,a
(I) = dimk (H
Ahora, por ser I fuertemente estable, tenemos que K a (I) es desfasado, y es
sencillo ver que es un complejo simplicial en los vértices {1, 2, . . . , k}. Por el
lema 2.37, tenemos que:
S
S
βp,a
(M ) = #(Γp+1 (k ∗ ∆0 ) \ Γp+1 (K a (I))) ≥ βp,a
(in(M )),
donde ∆0 es como en 2.37, y la última desigualdad se deduce de lo descrito
en el párrafo anterior.
Capı́tulo 3
Mapping Cones
La técnica de considerar “conos” sobre un cierto espacio topológico es
tradicional en Topologı́a Algebraica, pues sirve para reflejar cuándo una aplicación continua puede ser homótopa a una aplicación constante. De forma
más general, se puede considerar lo que se denomina “mapping cone” de
dos espacios topológicos, y que también refleja propiedades de homotopı́a
(ver [Mas, section X.3]).
Pasando a los complejos de módulos que surgen en las teorı́as de homologı́a singular, simplicial, celular, etc. se definió su versión en Álgebra Homológica, también denominada “mapping cone”, y que es la que trataremos
en este capı́tulo (ver [Wei, pages 19, 20] para un breve comentario).
La idea de utilizar esta técnica para obtener resoluciones de ideales monomiales ha ido surgiendo poco después de que apareciera la resolución de
Eliahou-Kervaire y, hasta la fecha, este es quizá el ejemplo más claro donde
ha tenido éxito. Cinco años después de la aparición del artı́culo original [EK],
en 1995 el artı́culo [EC] dio un primer paso en este sentido, definiendo de
forma precisa la técnica que se utilizarı́a más adelante, que es la de mapping
cones iterados.
Más adelante, en [HT] (y en una versión simplificada, en [PS]), se aplicó esta técnica para ideales monomiales que admiten cocientes lineales y funciones de descomposición regulares, que son precisamente las herramientas que permiten que el proceso de mapping cones iterados funcione. Sin
embargo, no existen muchas familias de ideales con propiedades tan fuertes,
y es precisamente la de ideales estables (y estables libres de cuadrados)
57
58
CAPÍTULO 3. MAPPING CONES
la que mejor se adapta a estas herramientas. Es por ello que veremos dicho
proceso para la resolución de Eliahou-Kervaire, en la forma en que aparece en
[HT], que ha sido apodada en otros artı́culos como resolución de EliahouKervaire generalizada, y que se ha demostrado que es celular de forma
simultánea en los artı́culos en [DM] y [Goo]. Veremos también cómo la
exactitud de la resolución de Taylor se puede obtener con esta técnica.
3.1.
Planteamiento general
En esta primera sección daremos la construcción general, y que actualmente sigue abierta a nuevas aplicaciones, más allá de situaciones tan especı́ficas como la de ideales monomiales con cocientes lineales y funciones de
descomposición. Recordemos las definiciones básicas de complejos y morfismos de complejos ([Mar, definiciones 1.25 y 1.27] ó [Wei, definition 1.1.1]).
Definición 3.1. Sean R un anillo cualquiera, (F, d) y (G, ∂) dos complejos
de R-módulos y ϕ : F −→ G un morfismo entre ellos. Llamamos mapping
cone de ϕ al complejo de R-módulos MC(ϕ) dado por M Ci = Fi−1 ⊕ Gi , y
cuya diferencial es:
δi (m, n) = (−di−1 (m), ϕi−1 (m) + ∂i (n)),
∀(m, n) ∈ Fi−1 ⊕ Gi .
Cuando no sea necesario especificar el morfismo ϕ, escribiremos simplemente
MC.
Conviene recordar cómo se define la diferencial del mapping cone según
el siguiente diagrama, o mediante una matriz de morfismos:
−di−1
Fi−1 −→
Fi−2
δi ≡ ⊕ & ϕi−1 ⊕
Gi
∂i
−→
Gi−1
ó δi =
−di−1 0
ϕi−1 ∂i
.
Expresar morfismos de R-módulos entre dos sumas directas como matrices
cuyos coeficientes son a su vez morfismos de R-módulos puede aligerar la
notación, y por tanto la utilizaremos en algunas ocasiones. Las reglas de
composición de morfismos se traducen en esta notación en el producto de
matrices, tal y como se define en su versión usual.
3.1. PLANTEAMIENTO GENERAL
59
En los dos siguientes lemas recogemos las principales propiedades de exactitud del mapping cone que utilizaremos más adelante:
Lema 3.2. Dado un morfismo ϕ : (F, d) −→ (G, ∂), su mapping cone
(MC(ϕ), δ) es un complejo de R-módulos, y la siguiente sucesión es exacta:
β
α
0 −→ G −→ MC(ϕ) −→ F(−1) −→ 0,
donde αi es el morfismo de inclusión, βi el de proyección y en F consideramos
la diferencial −d, para cada i ∈ Z. Dicha sucesión induce la sucesión exacta
larga en homologı́a:
Hi (α)
Hi (β)
Hi−1 (ϕ)
. . . −→ Hi (G) −→ Hi (MC) −→ Hi−1 (F) −→ Hi−1 (G) −→ . . .
En particular, ϕ induce un isomorfismo Hi (ϕ) en homologı́a si, y sólo si, el
complejo MC(ϕ) es exacto.
Demostración. Para ver que realmente MC(ϕ) es un complejo, la notación
matricial simplificará los cálculos:
−di−1 0
−di 0
di−1 di
0
δi δi+1 =
=
= 0.
ϕi−1 ∂i
ϕi ∂i+1
−ϕi−1 di + ∂i ϕi ∂i ∂i+1
Y, por otro lado, α y β definen morfismos de complejos:
−di−1 0
0
0
0
δi αi =
=
=
∂i = αi−1 ∂i , y
ϕi−1 ∂i
Id
∂i
Id
−di−1 0
(−di−1 )βi = −di−1 (Id, 0) = (−di−1 , 0) = (Id, 0)
= βi−1 δi .
ϕi−1 ∂i
Ahora, los complejos (F, d) y (F, −d) son canónicamente isomorfos y sus
módulos de homologı́a son de hecho el mismo. Por tanto, la sucesión exacta
larga en homologı́a se deduce de [Mar, teorema 2.3]. Falta comprobar que el
homomorfismo conector, τ , es de hecho Hi (ϕ). Siguiendo la prueba de dicho
teorema, tomamos x ∈ Hi (F) y (x, 0) ∈ M Ci+1 , una contraimagen de x.
Entonces, (0, ϕi (x)) = δi+1 (x, 0), por lo que τi (x) = ϕi (x), como querı́amos
demostrar.
Ahora utilizaremos este lema para construir resoluciones libres a partir
de otras dadas:
60
CAPÍTULO 3. MAPPING CONES
Lema 3.3. Dada una sucesión exacta corta de R-módulos:
ϕ
0 −→ M 0 −→ M −→ M 00 −→ 0,
y resoluciones libres (F0 , d0 ) y (F, d) de M 0 y M , respectivamente, si llamamos
también ϕ : F0 −→ F a la única (salvo homotopı́a) elevación de ϕ : M 0 −→
M , entonces MC(ϕ) es una resolución libre de M 00 .
Demostración. La definición, existencia y unicidad (salvo homotopı́a) de la
elevación ϕ : F0 −→ F se encuentra en [Mar, lema 2.5]. Ahora, claramente
los módulos que aparecen en MC(ϕ) son libres por ser sumas directas de
módulos libres. Por otro lado, la sucesión exacta larga en homologı́a del lema
anterior implica que Hi (MC(ϕ)) = 0, para i > 1. El final de dicha sucesión
exacta larga es:
ϕ
. . . −→ 0 −→ H1 (MC) −→ M 0 −→ M −→ H0 (MC) −→ 0,
pues H0 (F0 ) ∼
= M 0 y H0 (F) ∼
= M (y por ser ϕ : F0 −→ F elevación de
0
ϕ : M −→ M ). Como ϕ es inyectiva, concluimos que H1 (MC) = 0 y
H0 (MC) ∼
= M 00 , por lo que MC es una resolución libre de M 00 .
Ahora concretamos poco a poco el contexto en el que nos movemos para
llegar a las aplicaciones que buscamos. Primero, vemos que si R es un anillo
graduado, y (F, d) y (G, ∂) son complejos graduados de R-módulos, entonces
su mapping cone es de nuevo un complejo graduado. Y en el segundo lema,
si M 0 , M , M 00 y ϕ son graduados, y (F0 , d0 ) y (F, d) son resoluciones libres
graduadas, entonces MC es una resolución libre graduada de M 00 .
En el caso graduado estándar (o multigraduado) sobre R = S, puede
ser que las resoluciones (F0 , d0 ) y (F, d) sean minimales, pero MC no serlo.
Ejemplo 3.4. Dados ideales I, J ⊂ S, siempre tenemos la sucesión exacta
corta natural:
ϕ
ψ
0 −→ I ∩ J −→ I ⊕ J −→ I + J −→ 0,
donde ϕ(f ) = (f, −f ) y ψ(f, g) = f + g. Podemos aplicar esto a los ideales
monomiales I = hx2 , yi y J = hxi en el anillo S = k[x, y]. Tenemos entonces
la sucesión:
1
−1
1 1
0 −→ hxy, x2 i −→ hx2 , yi ⊕ hxi −→
hx, yi −→ 0.
3.1. PLANTEAMIENTO GENERAL
61
Ahora, es sencillo comprobar (mediante el algoritmo de Schreyer [Mar, lema
3.29 ó teorema 3.31], por ejemplo), que las resoluciones libres minimales
graduadas de I ∩ J e I ⊕ J son, respectivamente:
0 −→ S
0 −→ S
x
−y
−→ S 2
y
−x2
0
−→
xy x2
−→
hxy, x2 i −→ 0, y
S3
x2 y 0
0 0 x
−→
hx2 , yi ⊕ hxi −→ 0.
Por otro lado, la elevación del morfismo ϕ viene dado por las matrices siguientes (indicadas a la derecha de su flecha correspondiente):
0 −→ S
−→
S2
↓ (−1)
0 −→ S
−→
↓
S3
hxy, x2 i
−→
0
1
x
0
↓
−y −x
−→
hx2 , yi ⊕ hxi
−→
1
−1
−→
0
0.
Por tanto, el mapping cone de ϕ nos proporciona la siguiente resolución libre
del ideal hx, yi:
0 −→ S
−x
y
−1
−→ S 3
0
1
y
x
0 −x2
−y −x 0
−→
S3
x2 y −x
−→
hx, yi −→ 0.
Vemos que efectivamente es graduada (de hecho multigraduada), pero no es
minimal, ya que aparecen términos constantes no nulos (haciendo fallar la
condición de minimalidad di+1 (Fi+1 ) ⊂ mFi ). También sabemos que no es
minimal porque la dimensión proyectiva de S/hx, yi es 2 y sus números de
Betti son 1 y 2 (ver [Mar, página 52]).
Por otro lado, la descripción de la diferencial del mapping cone como una
matriz de morfismos nos permite construir sus matrices por cajas, adjuntando
las matrices correspondientes. En este ejemplo, en grado homológico i = 1:
0
1
y
−d 0
0 −x2 .
δ=
= ϕ ∂ = x
ϕ ∂
−y −x 0
62
CAPÍTULO 3. MAPPING CONES
Finalmente, pasamos a aplicar el lema anterior al caso de ideales monomiales, para obtener la técnica que llamaremos de mapping cones iterados.
Sea I ⊂ S un ideal monomial, cuyo sistema minimal de generadores
monomiales es {m1 , . . . , mr }. Consideremos Ij = hm1 , m2 , . . . , mj i, para j =
1, 2, . . . , r, ideales encajados. Entonces, para cada j ≥ 1, la siguiente sucesión
es exacta:
mj+1
0 −→ S/(Ij : mj+1 ) −→ S/Ij −→ S/Ij+1 −→ 0,
donde el morfismo de la izquierda es multiplicar por mj+1 y el morfismo de la
derecha es el morfismo natural de paso al cociente. Éste último es multigraduado (de grado 0), mientras que el de la izquierda es multigraduado, pero
de grado mj+1 , por lo que consideraremos la multigraduación desplazada
S/(Ij : mj+1 )(mj+1 ).
Observemos que la condición de minimalidad sobre el sistema de generadores {m1 , m2 , . . . , mr } implica que la sucesión de ideales encajados I1
I2 . . . Ir = I es estrictamente creciente y por tanto en la sucesión exacta
anterior, S/(Ij : mj+1 ) 6= 0.
La técnica de mapping cones iterados consiste entonces en conocer
resoluciones libres multigraduadas de S/I1 (que es obvia por ser I1 = hm1 i
principal) y de los cocientes S/(Ij : mj+1 ), para j = 1, 2, . . . r − 1, y obtener
ası́ una resolución libre multigraduada de S/Ir = S/I, aplicando el lema
anterior de forma iterada.
Observación 3.5. En el lema 3.3, no hemos especificado cuál es el morfismo sobreyectivo : M C0 −→ M 00 que hace que . . . −→ M C1 −→ M C0 −→
M 00 −→ 0 sea una sucesión exacta. Es decir, según la definición [Mar, definición 1.25], no hemos dado de forma explı́cita el morfismo de aumento de
la resolución que proporciona el mapping cone. De hecho, podemos elegir
varios (podemos multiplicar uno dado por un escalar de k para obtener otro,
por ejemplo).
Sin embargo, cuando hacemos mapping cones iterados para ideales monomiales, en el paso j ≥ 1, es natural considerar el morfismo de paso al cociente
S −→ S/Ij+1 , ya que la diferencial obtenida a partir de los sucesivos mapping
cones en grado homológico i = 1 tiene la siguiente expresión:
S j+1
mj+1 mj . . . m1
−→
S −→ 0,
3.1. PLANTEAMIENTO GENERAL
63
lo cual es obviamente debido a que el morfismo ϕ que escogemos en el paso
j es multiplicar por mj+1 .
Ejemplo 3.6. Consideremos el anillo S = k[x, y] y el ideal I = hx2 y, y 3 , xy 2 i.
Dichos generadores son minimales, en dicho orden los ideales encajados son
I1 = hx2 yi, I2 = hx2 y, y 3 i e I3 = I, y los cocientes anteriores son:
(x2 y : y 3 ) = hx2 i y (hx2 y, y 3 i : xy 2 ) = hx, yi.
Conocemos las resoluciones de dichos cocientes y por tanto podemos aplicar
el procedimiento anterior. En el siguiente diagrama aparecen dichas resoluciones junto con el morfismo de elevación, para la primera iteración del procedimiento:
x2
−→ S
−→ S/hx2 i
0 −→ S
2
3
↓y
↓y
↓ y3
x2 y
0 −→ S
−→ 0
−→ S/hx2 yi −→ 0.
−→ S
Por tanto, obtenemos la siguiente resolución de S/I2 :
0 −→ S
−x2
y2
−→
S2
y 3 x2 y
−→
S −→ S/hx2 y, y 3 i −→ 0.
Ahora, para la segunda iteración, tenemos el morfismo de elevación entre las
siguientes resoluciones:
0 −→ S
y
−x
−→
↓1
S 2
↓
0 −→ S
−x2
y2
−→
0 x
y 0
x y
−→
−→ S/hx, yi
S
↓ xy 2
↓ xy 2
S2
y 3 x2 y
−→
−→ S/hx2 y, y 3 i.
S
Y finalmente, hallando el mapping cone de este morfismo, obtenemos una
resolución de S/I:
0 −→ S
−y
x
1
−→ S 3
−x −y 0
0
x −x2
y
0
y2
−→
S3
xy 2 y 3 x2 y
−→
S −→ S/I −→ 0,
64
CAPÍTULO 3. MAPPING CONES
que observamos que no es minimal, ya que tiene longitud 3 y la dimensión
proyectiva de un S-módulo graduado es como mucho 2, el número de variables. Además, aparece un coeficiente constante no nulo en la primera matriz.
Este ejemplo nos sirve para ver que el orden en el que tomamos los generadores del ideal monomial es esencial, ya que si los ordenáramos como
I = hx2 y, xy 2 , y 3 i, entonces los cocientes serı́an:
(x2 y : xy 2 ) = hxi y (hx2 y, xy 2 i : y 3 ) = hxi.
Y en este caso ambas iteraciones son más sencillas y obtenemos la resolución
siguiente:
0 −→ S
2
−x 0
y −x
0
y
−→
S
3
y 3 xy 2 x2 y
−→
S −→ S/I −→ 0,
que sı́ es minimal, ya que los coeficientes no nulos tienen grado positivo.
De hecho, el ideal I no es fuertmente estable para el orden usual de las
variables, pero sı́ lo es si ponemos x1 = y y x2 = x. En este ejemplo hemos
adelantado la prueba de cómo construir la resolución de Eliahou-Kervaire
mediante mapping cones, que veremos en la siguiente sección.
3.2.
La resolución de Taylor vı́a mapping cones
En esta breve sección aplicaremos el método anterior para demostrar
directamente que la resoluciones de Taylor (sección 2.3) realmente es un
complejo exacto. De hecho, lo que haremos será volver a construir dicha
resolución.
Teorema 3.7. Dado un ideal monomial I ⊂ S y generadores monomiales
suyos m1 , . . . , mr ∈ S, la resolución de Taylor de S/I asociada a dichos
generadores, TI , es un complejo exacto.
Demostración. Utilizaremos las notaciones de la sección 2.3, y denotamos
Ij = hm1 , m2 , . . . , mj i, para 1 ≤ j ≤ r, y Qj = (Ij : mj+1 ), para 1 ≤ j ≤ r−1.
Procedemos entonces por inducción en j. Para j = 1, tenemos
TI1 ≡ 0 −→
1
^
m1
S = S −→
0
^
S = S −→ S/I1 −→ 0,
3.3. LA RESOLUCIÓN DE ELIAHOU-KERVAIRE GENERALIZADA 65
que obviamente es exacto. Supongamos que hemos demostrado que TIj es
exacto, para cierto j ≥ 1. Primero, observemos que Qj = hn1 , n2 , . . . , nj i,
donde ni = mcm(mi , mj+1 )/mj+1 . Por tanto, por hipótesis de inducción,
podemos utilizar las resoluciones TIj y TQj , y obtenemos el diagrama siguiente:
∂0
∂0
0
2
1
. . . −→ TQj ,2 −→
TQj ,1 −→
TQj ,0 −→ S/Qj −→ 0
↓ ϕ2
↓ ϕ1
↓ ϕ0
↓ϕ
∂2
∂1
. . . −→ TIj ,2 −→ TIj ,1 −→ TIj ,0 −→ S/Ij −→ 0,
donde ϕ(n) = mj+1 n, {ϕi }i≥0 es su elevación, y y 0 son los morfismos de
paso al cociente. Podemos escoger la elevación de la siguiente forma:
ϕi (ej1 ∧ . . . ∧ eji ) =
mcm(mj1 , . . . , mji , mj+1 )
(ej1 ∧ . . . ∧ eji ),
mcm(mj1 , . . . , mji )
pues se verifica que ∂i ϕi = ϕi−1 ∂i0 para i ≥ 1, y ϕ0 = ϕ0 , para lo cual basta
utilizar que
mj+1 mcm(nj1 , . . . , nji ) = mcm(mj1 , . . . , mji , mj+1 ).
Por tanto, al hallar el mapping cone de ϕ, obtenemos:
!
!
i−1
i
i
^
^
^
j
j
∼
M Ci (ϕ) = TQj ,i−1 ⊕ TIj ,i =
S ⊕
S
= (S j+1 ) ∼
= TIj+1 ,i ,
donde los isomorfismos son los naturales, y vemos que la diferencial de dicho
mapping cone,
−di−1 0
δi =
,
ϕi−1 ∂i
resulta ser la diferencial TIj+1 ,i −→ TIj+1 ,i−1 . Para ver esto, basta utilizar
las expresiones anteriores entre las mi y las ni . Y hemos concluido la demostración.
3.3.
La resolución de Eliahou-Kervaire generalizada
A continuación, utilizaremos la técnica de mapping cones iterados para
obtener la resolución de Eliahou-Kervaire. Aunque la versión que aparece en
66
CAPÍTULO 3. MAPPING CONES
[PS] supone una pequeña simplificación de la prueba de [HT], seguiremos
esta última, ya que proporciona una versión generalizada, donde se ve que los
cocientes lineales y las funciones de descomposición son justo las herramientas
que necesitamos para obtener la resolución que buscamos.
Además, esta versión generalizada incluye a la resolución de EliahouKervaire libre de cuadrados y las resoluciones minimales de otros ideales
monomiales, como los llamados “idelaes matroidales”, que son los ideales de
Stanley-Reisner de complejos simpliciales que verifican cierta propiedad y
que se denominan “matroides” (ver [HT, section 1]).
En esta sección necesitaremos introducir bastante notación, aunque parte
de ella no será más que una extensión de la utilizada en las secciones 1.4 y
1.5. En lo que sigue, fijaremos un ideal monomial I ⊂ S, cuyo conjunto de
monomios y sistema minimal de generadores monomiales denotamos por
M (I) y G(I), respectivamente.
Definición 3.8. Decimos que I tiene cocientes lineales si podemos ordenar
los elementos de G(I) = {m1 , m2 , . . . , mr } de forma que los cocientes Qj =
(hm1 , . . . , mj i : mj+1 ) están generados por variables, para todo j ≥ 1. En tal
caso, definimos
set(mj ) = {i ∈ {1, 2, . . . , n}/xi ∈ Qj−1 }.
También definimos set(m1 ) = ∅.
Cuando pongamos G(I) = {m1 , m2 , . . . , mr }, supondremos siempre que
este es el orden para el cual I tiene cocientes lineales, y escribiremos Ij =
hm1 , . . . , mj i. Cuando apliquemos la técnica de mapping cones iterados a
estos ideales, supondremos siempre que tomamos como resolución de S/Qj
el complejo de Koszul K(set(mj+1 )), que es su resolución libre minimal
multigraduada.
Veamos ahora que los ideales estables y estables libres de cuadrados
tienen cocientes lineales. Daremos dos órdenes en G(I), donde <revlex es el
orden lexicográfico inverso (es decir, en Nn , α < β si la componente no nula
más a la derecha de β − α es negativa):
1. Si i < j, entonces deg(mi ) < deg(mj ) ó deg(mi ) = deg(mj ) y en tal
caso, mi >revlex mj .
3.3. LA RESOLUCIÓN DE ELIAHOU-KERVAIRE GENERALIZADA 67
2. Si i < j, entonces mi >revlex mj .
Ambos órdenes servirán para nuestros propósitos, pero con el primero obtenemos la ventaja de que deg(m1 ) ≤ deg(m2 ) ≤ . . . ≤ deg(mr ). Denotamos
también, al igual que en la sección 2.4, ui = máx(mi ).
Lema 3.9. Si I es estable (resp. fuertemente), entonces para todo j, con dichos órdenes, el ideal Ij = hm1 , m2 , . . . , mj i también es estable (resp. fuertemente) y
(Ij : mj+1 ) = hx1 , x2 , . . . , xuj+1 −1 i.
Lema 3.10. Si I es estable libre de cuadrados (resp. fuertemente), entonces
para todo j, con dichos órdenes, el ideal Ij = hm1 , m2 , . . . , mj i también es
estable libre de cuadrados (resp. fuertemente) y
(Ij : mj+1 ) = h{xi /xi no divide a mj+1 e i < uj+1 }i.
Demostración. Haremos simultáneamente ambas pruebas. Primero, Ij es estable (resp. fuertemente, ó libre de cuadrados), pues si xk divide a mq e
i < k, q ≤ j, (resp. k = máx(mq ), ó además xi (mq /xk ) es libre de cuadrados), entonces existe un ms tal que xi mq = xk ms m, para cierto monomio
m ∈ S. Si fuera s > q, como no puede ser deg(mq ) < deg(ms ), tendrı́amos
que mq >revlex ms , por lo que xi mq >revlex xk ms m, lo que es absurdo.
Veamos ahora la igualdad indicada. Primero, si i < uj+1 (resp. y xi no
divide a mj+1 ), entonces existe un ms tal que xi mj+1 = xuj+1 ms m, para
cierto monomio m ∈ S. Se concluye igual que antes que debe ser s < j + 1,
por lo que xi ∈ (Ij : mj+1 ).
Recı́procamente, si la contención fuera estricta, existirı́a un monomio m ∈
S tal que mj+1 m ∈ Ij y xi no divide a m, para i < uj+1 (resp. y tal que xi no
divide a mj+1 ). En particular, vemos que máx(mj+1 ) ≤ mı́n(m). Como Ij es
estable (resp. fuertemente, libre de cuadrados), existe un ms con s ≤ j y tal
que mj+1 m = ms m0 , para cierto monomio m0 ∈ S con máx(ms ) ≤ mı́n(m0 ).
Entonces hemos encontrado dos expresiones distintas como la del lema 1.35
(resp. 1.44), lo que es absurdo.
Antes de hallar la resolución de forma completa, veamos cómo obtener
sus bases multigraduadas de forma sencilla, lo que ya nos darı́a los números
de Betti y todos los invariantes que aparecen en 1.36 y 1.45:
68
CAPÍTULO 3. MAPPING CONES
Teorema 3.11. Si I admite cocientes lineales con el orden m1 , m2 , . . . , mr y
deg(m1 ) ≤ deg(m2 ) ≤ . . . ≤ deg(mr ), entonces la resolución de S/I obtenida por mapping cones iterados es minimal y la base homogénea en grado
homológico p + 1, para p ≥ 1 está dada por los siguientes sı́mbolos:
{(mj ; j1 , . . . , jp )/{j1 , j2 , . . . , jp } ⊂ set(mj ), 1 ≤ j ≤ r},
en grado homológico i = 1 por (m1 ; ∅), . . . , (mr ; ∅), y con la multigraduación
dada por mdeg(mj ; j1 , . . . , jp ) = xj1 xj2 · · · xjp mj .
Demostración. Haremos mapping cones iterados, por lo que procedemos por
inducción en j ≥ 1, donde denotamos por F(j) a la resolución de S/Ij que
obtendremos en cada paso. Para j = 1, tenemos I1 = hm1 i, es principal y el
teorema es obvio en este caso.
Si suponemos que es cierto para j ≥ 1, entonces para construir la resolución de S/Ij+1 , tenemos que hacer el mapping cone de F(j) con la resolución
minimal de S/Qj , que es el complejo de Koszul K(j) = K(set(mj+1 )). Ahora,
(j+1)
(j)
(j)
Fp+1 = Fp+1 ⊕ Kp , para p ≥ 0, por lo que obtenemos la base deseada,
(j)
definiendo (mj+1 ; j1 , . . . , jp ) = ej1 ∧ . . . ∧ ejp , en Kp .
Por último, si ϕ : K(j) −→ F(j) es el morfismo de elevación, como por
hipótesis K(j) y F(j) son minimales, para ver que F(j+1) también lo es, basta
(j)
(j)
ver que ϕ(Kp+1 ) ⊂ mFp+1 . Pero esto se deduce de la multigraduación dada a
las correspondientes bases, ya que el elemento (mj+1 ; j1 , . . . , jp+1 ) de la base
(j)
de Kp+1 tiene multigrado xj1 xj2 · · · xjp+1 mj+1 , y el elemento (mk ; j1 , . . . , jp ) de
(j)
la base de Fp+1 tiene multigrado xj1 xj2 · · · xjp mk , pero deg(mk ) ≤ deg(mj+1 ),
para k ≤ j, por lo que hay que multiplicar por cierto monomio no constante
para que ϕ sea multigraduada.
Ahora, si queremos hallar completamente la resolución, es decir, calcular también sus diferenciales, necesitamos una herramienta más, que son las
funciones de descomposición:
Definición 3.12. Si el ideal I tiene cocientes lineales para el orden G(I) =
{m1 , m2 , . . . , mr }, definimos la correspondiente función de descomposición como b : M (I) −→ G(I) tal que:
b(m) = mj ,
donde j = mı́n{k ∈ {1, 2, . . . , r}/m ∈ Ik }.
3.3. LA RESOLUCIÓN DE ELIAHOU-KERVAIRE GENERALIZADA 69
Y decimos que dicha función de descomposición es regular si verifica que
set(b(xi mj )) ⊂ set(mj ), para todo i ∈ set(mj ), y 1 ≤ j ≤ r.
De los lemas 3.9 y 3.10 es inmediato que las funciones de descomposición
de los ideales estables y estables libres de cuadrados son regulares. Por otra
parte, necesitaremos las siguientes propiedades básicas de las funciones de
descomposición:
Lema 3.13. Sea I un ideal con cocientes lineales para el orden G(I) =
{m1 , m2 , . . . , mr }, y sean m, n ∈ M (I). Entonces:
1. m = b(m)e(m), para cierto monomio e(m) que verifica set(b(m)) ∩
supp(e(m)) = ∅.
2. Si m = mj n, y set(mj ) ∩ supp(n) = ∅, entonces b(m) = mj .
3. b(mn) = b(m) si, y sólo si, set(b(m)) ∩ supp(n) = ∅.
4. Si b : M (I) −→ G(I) es regular, entonces b(xi b(xj mk )) = b(xi xj mk )) =
b(xj b(xi mk )), para todos i, j ∈ set(mk ), y 1 ≤ k ≤ r.
Demostración.
1. Por definición, si b(m) = mj , entonces m ∈ Ij , pero
m ∈
/ Ij−1 , por lo que debe ser m = mj n, para cierto monomio n.
Ahora, si existe un i ∈ set(mj ) ∩ supp(n), entonces poniendo n = xi n0 ,
tenemos que xi mj ∈ Ij−1 y entonces m = (xi mj )n0 ∈ Ij−1 , lo que serı́a
absurdo.
2. Primero, es obvio que m ∈ Ij . Si m ∈ Ij−1 , entonces n ∈ Qj−1 , por lo
que existirı́a un i ∈ set(mj ) tal que xi divide a n, lo que serı́a absurdo.
3. Si b(mn) = b(m) = mj , entonces mn = mj e(mn) y m = mj e(m),
por lo que e(mn) = ne(m) y supp(n) ⊂ supp(e(mn)), y por tanto
supp(n) ∩ set(b(m)) = ∅. Recı́procamente, si supp(n) ∩ set(b(m)) = ∅,
y mj = b(m), entonces mn = mj ne(m), y supp(ne(m)) ∩ set(mj ) = ∅,
por lo que b(mn) = mj .
4. Primero, si i ∈ set(b(xj mk )), entonces set(b(xi b(xj mk ))) ⊂ set(b(xj mk )),
por ser b regular, y si i ∈
/ set(b(xj mk )), entonces b(xi b(xj mk )) =
70
CAPÍTULO 3. MAPPING CONES
b(xj mk ). Por tanto, siempre set(b(xi b(xj mk ))) ⊂ set(b(xj mk )). Es decir,
tenemos que
xi xj mk = xi b(xj mk )e(xj mk ) y set(b(xi b(xj mk ))) ∩ supp(e(xj mk )) = ∅,
y por el apartado 3, tenemos que b(xi xj mk ) = b(xi b(xj mk )).
Observemos que las propiedades 1 y 2 caracterizan a la función de descomposición y dan lugar a su nombre. Además, observamos que, junto con
los lemas 3.9 y 3.10, las asignaciones dadas por b y e en dichos apartados
coinciden con las dadas en los lemas 1.35 y 1.44. Utilizando estas propiedades,
obtenemos la serie de Hilbert (argumentando como en 1.37) y la descripción
completa de la resolución que buscamos:
Proposición 3.14. Sea I un ideal con cocientes lineales para el orden G(I) =
{m1 , . . . , mr }. Entonces,
r
Y
X
1
mi
.
HI (x) =
(1
−
x
)
j
i=1
j ∈set(m
/
i)
Teorema 3.15. Sea I ⊂ S un ideal monomial con cocientes lineales para el
orden G(I) = {m1 , m2 , . . . , mr }, y con función de descomposición regular b :
M (I) −→ G(I). Entonces, la resolución (F, ∂) de S/I obtenida por mapping
cones iterados es minimal, tiene la misma base multigraduada que en 3.11,
y la diferencial ∂ está dada por la siguiente expresión:
∂p+1 (mj ; α) =
p
X
q=1
(−1)q xjq (mj ; α \ jq ) −
p
X
(−1)q e(xjq mj )(b(xjq mj ); α \ jq ),
q=1
donde α = {j1 , j2 , . . . , jp } ⊂ set(mj ), con j1 < j2 < . . . < jp , y donde
adoptamos el convenio (mj ; α) = 0 si α * set(mj ).
Demostración. Primero, si las diferenciales realmente son ası́, claramente la
resolución es minimal. Volvemos a proceder por inducción en j ≥ 1, donde
volvemos a denotar por F(j) y K(j) a las resoluciones minimales de S/Ij y
S/Qj , respectivamente (de nuevo, K(j) = K(set(mj+1 ))). El caso j = 1 vuelve
a ser trivial.
3.3. LA RESOLUCIÓN DE ELIAHOU-KERVAIRE GENERALIZADA 71
Supongamos entonces que se verifica para j ≥ 1. De nuevo, la base de
vuelve a ser como en 3.11. Como F(j) es un subcomplejo de F(j+1) ,
basta comprobar la expresión de ∂ en los elementos de la base (mj+1 ; α), con
α ⊂ set(mj+1 ). Sea ϕ : K(j) −→ F(j) el morfismo de elevación. Entonces,
por definición de mapping cone, tenemos que ∂(mj+1 ; α) = −d(mj+1 ; α) +
ϕ(mj+1 ; α), donde d es la diferencial del complejo de Koszul. Por tanto, vemos
que si la siguiente expresión
(j)
Fi
p
X
(−1)q+1 e(xjq mj+1 )(b(xjq mj+1 ); α \ jq ),
ϕ(mj+1 ; α) =
q=1
cuando α 6= ∅, y ϕ(mj+1 ; ∅) = mj+1 , define una elevación del morfismo
mj+1
S/Qj −→ S/Ij , entonces ya hemos obtenido la expresión que buscamos.
Para ello, tenemos que verificar (por inducción en grado homológico) que
ϕd = ∂ϕ, donde d es la diferencial de K(j) y ∂ la de F(j) . Para simplificar la
notación, escribiremos m = mj+1 . Primero, ϕ(d(m; ∅)) = m = ∂(ϕ(m; ∅)),
y si i ∈ set(m), entonces
ϕ(d(m; i)) = ϕ(xi (m; ∅)) = xi m = ∂(e(xi m)(b(xi m); ∅)) = ∂(ϕ(m; i)).
Supongamos entonces que α = {j1 , j2 , . . . , jp } ⊂ set(m), j1 < j2 < . . . < jp y
p ≥ 2. Por un lado, tenemos que
p
X
ϕ(d(m; α)) =
(−1)q+1 xjq ϕ(m; α \ jq )
q=1
p
=
XX
(−1)q+s xjq e(xjs m)(b(xjs m); α \ {jq , js })
q=1 s<q
p
−
XX
(−1)q+s xjq e(xjs m)(b(xjs m); α \ {jq , js }).
q=1 s>q
Y por otra parte,
p
X
∂(ϕ(m; α)) =
(−1)q+1 e(xjq m)∂(b(xjq m); α \ jq ), y
q=1
∂(b(xjq m); α \ jq ) =
X
s xjs (b(xjq m); α \ {jq , js })
s6=q
−
X
s6=q
s e(xjs b(xjq m))(b(xjs b(xjq m)); α \ {jq , js }),
72
CAPÍTULO 3. MAPPING CONES
donde s = (−1)s , si s < q, y s = (−1)s+1 , si s > q. Ahora bien, puede
ocurrir que α \ jq * set(b(xjq m)), y entonces (b(xjq m); α \ jq ) = 0. En ese
caso, si α \ {jq , js } * set(b(xjq m)), entonces α \ {jq , js } * set(b(xjs b(xjq m))),
y por tanto, los términos de la derecha son todos nulos. Por otra parte,
si α \ {jq , js } ⊂ set(b(xjq m)), entonces js ∈
/ set(b(xjq m)), y por tanto,
b(xjs b(xjq m)) = b(xjq m) y los términos de la derecha se cancelan unos con
otros. Por tanto, dicha igualdad es válida, y aplicándola a la anterior obtenemos:
p
X
X
(−1)q+s+1 xjs e(xjq m)(b(xjq m); α \ {jq , js })
∂(ϕ(m; α)) =
q=1 s<q
p
−
XX
(−1)q+s+1 xjs e(xjq m)(b(xjq m); α \ {jq , js })
q=1 s>q
p
−
XX
(−1)q+s+1 e(xjs b(xjq m))(b(xjs b(xjq m)); α \ {jq , js })
q=1 s<q
p
+
XX
(−1)q+s+1 e(xjs b(xjq m))(b(xjs b(xjq m)); α \ {jq , js }).
q=1 s>q
Pero los dos últimos sumandos se cancelan, ya que podemos intercambiar el
papel de q y s por el apartado 4 del lema 3.13, y los dos primeros sumandos
se corresponden justo con ϕ(d(m; α)), de nuevo intercambiando los papeles
de q y s, lo que concluye la demostración.
Para finalizar la sección, veamos con unos ejemplos que las condiciones
que hemos ido imponiendo en cada paso no siempre se verifican:
Ejemplo 3.16. Primero, puede ser que I admita cocientes lineales para
el orden G(I) = {m1 , m2 , . . . , mr }, y que no se verifique que deg(m1 ) ≤
deg(m2 ) ≤ . . . ≤ deg(mr ). Dos ejemplos son I = hx1 x2 , x2 x3 x4 , x1 x3 i y
J = hx1 x22 , xs2 , x21 x2 i, para cualquier s > 3. Por lo que en estos ejemplos
no podemos aplicar 3.11. Sin embargo, sus funciones de descomposición son
regulares y podemos aplicar 3.15.
Por otro lado, no toda función de descomposición es regular. Dos ejemplos
son I = hx1 x2 , x2 x3 , x3 x4 i, pues set(x3 x4 ) = {2} y set(b(x2 (x3 x4 ))) = {1}, y
J = hx1 x22 , x22 x3 , x2 x23 i, pues set(x2 x23 ) = {2} y set(b(x2 (x2 x23 ))) = {1}. Sin
embargo, en estos ejemplos podemos aplicar 3.11.
3.4. LA RESOLUCIÓN DE ELIAHOU-KERVAIRE ES CELULAR
73
Un ejemplo de ideal con cocientes lineales que no verifica las hipótesis de
3.11 ni de 3.15 es I = hx1 x22 , xs2 , x22 x3 , x2 x23 i, para cualquier s > 3.
Por último, la propiedad de intercambio del apartado 4 de 3.13 no es
equivalente a la regularidad de la función de descomposición. Los ejemplos
anteriores I = hx1 x2 , x2 x3 , x3 x4 i y J = hx1 x22 , x22 x3 , x2 x23 i son claros. Otro
ejemplo menos sencillo serı́a K = hx1 x2 , x2 x3 , x1 x4 , x2 x5 , x4 x5 i.
3.4.
La resolución de Eliahou-Kervaire es celular
En esta última sección, veremos cómo la resuloción de Eliahou-Kervaire
es celular en el sentido de la definición 2.22, es decir, existe un complejo
celular X = (|X|, Γ) junto con una función de incidencia tales que la
resolución de Eliahou-Kervaire coincide con FX .
Actualmente existen varias construcciones de estos complejos celulares. El
primero en dar una fue J. Mermin en el artı́culo [Mer], y que funciona para
la resolución clásica de Eliahou-Kervaire. Sin embargo, muy recientemente,
dos artı́culos casi simultáneos dieron una construcción para la resolución de
Eliahou-Kervaire generalizada de [HT] que hemos presentado en la sección
anterior. Dichas construcciones se deben, por un lado, a A. Goodarzi en el
artı́culo [Goo], y por otro, a A. Dochtermann y F. Mohammadi en el artı́culo
[DM]. En esta sección, presentaremos esta última construcción, ya que la
descripción es más elemental y fácil de visualizar. De hecho, por primera vez
en esta memoria, podremos obtener ejemplos de resoluciones celulares que
no son simpliciales, como la de Taylor.
Aunque la descripción celular se puede hacer a partir de sı́mplices abstractos, comenzamos identificando cada monomio xa = xa11 · · · xann con el vector
a = (a1 , . . . , an ) ∈ Rn . Por otra parte, en toda la sección, I ⊂ S será un ideal
monomial con cocientes lineales para el orden G(I) = {m1 , m2 , . . . , mr }
y cuya función de descomposición, b : M (I) −→ G(I), es regular.
Utilizaremos también las notaciones de la sección anterior, es decir, Ij =
hm1 , m2 , . . . , mj i y Qj = (Ij : mj+1 ), y además, para prescindir de subı́ndices,
escribiremos m1 < m2 < . . . < mr para indicar el orden de los generadores.
Comenzamos definiendo los sı́mplices que constituirán los “ladrillos” de
74
CAPÍTULO 3. MAPPING CONES
la construcción celular que obtendremos.
Definición 3.17. Para cada m ∈ G(I), cada α ⊂ set(m), con #α = p, y
cada permutación σ = (σ1 , σ2 , . . . , σp ) de α, definimos inductivamente
b(xσi+1 , xσi , . . . , xσ1 , m) = b(xσi+1 b(xσi , . . . , xσ1 , m)).
Por otro lado, definimos como s(m, α, σ) al sı́mplice abstracto formado por
los elementos m, b(xσ1 m), . . . , b(xσ1 , . . . , xσp , m). Diremos que s(m, α, σ) es
no degenerado si estos monomios no se repiten, y en caso contrario, diremos
que es degenerado.
A posteriori veremos que la clausura convexa en Rn de los puntos de
s(m, α, σ) es siempre un sı́mplice, y constiturá una realización geométrica
natural, pero de momento seguiremos considerándolos como sı́mplices abstractos, y para abreviar utilizaremos la notación de upla ordenada, lo que ya
da una orientación de dichos sı́mplices:
s(m, α, σ) = (m, b(xσ1 m), . . . , b(xσ1 , . . . , xσp , m)).
Para manejar estos conjuntos, necesitaremos algunas propiedades básicas que
cumplen:
Lema 3.18. Sean m ∈ G(I), α ⊂ set(m), con #α = p, y σ una permutación de α, como antes. Denotemos s(m, α, σ) = (w0 = m, w1 , . . . , wp ).
Observemos que wi = b(xσi wi−1 ), para todo i ≥ 1. Se verifican las siguientes
propiedades:
1. Siempre w0 ≥ w1 ≥ w2 ≥ . . . ≥ wp y s(m, α, σ) es no generado si, y
sólo si, las desigualdades son estrictas, que a su vez es equivalente a
σi ∈ set(wi−1 ), para todo i ≥ 1.
2. Siempre se verifica que set(wi ) ⊂ set(wi−1 ), y si s(m, α, σ) es no degenerado, entonces σi , σi+1 , . . . , σp ∈ set(wi−1 ), para todo i ≥ 1.
3. Para cualquier s(m, α, σ), tenemos que b(xσi , . . . , xσ1 , m) = b(xσi · · · xσ1 ·
m), y por tanto, si σ 0 = (σ10 , σ20 , . . . , σi0 ) es otra permutación de los elementos σ1 , σ2 , . . . , σi , entonces
b(xσi , . . . , xσ1 , m) = b(xσi0 , . . . , xσ10 , m).
3.4. LA RESOLUCIÓN DE ELIAHOU-KERVAIRE ES CELULAR
75
4. Si s(m, α, σ) y s(m, α, σ 0 ) = (w00 = m, w10 , . . . , wp0 ) son no degenerados
y wj0 = wj , para todo j = 1, 2, . . . , i, entonces σj0 = σj , para todo j =
1, 2, . . . , i. En particular, si s(m, α, σ) = s(m, α, σ 0 ), entonces σ = σ 0 .
5. No pueden existir dos sı́mplices no degenerados de la forma s(m, α, σ)
y s(m, α, σ 0 ) = (w00 = m, w10 , . . . , wp0 ) con wj0 = wj para todo j < i, y
0
wi+1
= wi .
Demostración.
1. Primero, wi−1 ≥ wi = b(xσi wi−1 ) es obvio por la definición de b. Por otra parte, de nuevo por la definición de b y set, wi−1 >
b(xσi wi−1 ) si, y sólo si, σi ∈ set(wi−1 ).
2. Por ser b regular, tenemos que set(wi ) ⊂ set(wi−1 ), y lo segundo es
consecuencia de esto y del apartado 1.
3. Procedemos por inducción en i, donde el caso i = 1 es trivial. Supongamos que b(xσi−1 , . . . , xσ1 , m) = b(xσi−1 · · · xσ1 · m), entonces, por el
lema 3.13 y por hipótesis de inducción, tenemos que
xσi wi−1 = wi n y xσi−1 · · · xσ1 m = wi−1 n0 ,
para ciertos monomios n, n0 ∈ S, con supp(n) ∩ set(wi ) = supp(n0 ) ∩
set(wi−1 ) = ∅. Como set(wi ) ⊂ set(wi−1 ), entonces supp(nn0 )∩set(wi ) =
∅, por lo que de la igualdad xσi · · · xσ1 m = wi nn0 , y el lema 3.13, obtenemos el resultado.
4. Supongamos que σj0 = σj para todo j < k ≤ i y que σk0 6= σk . Tenemos
que wk = b(xσk wk−1 ) = b(xσk0 wk−1 ), por lo tanto, por el lema 3.13,
xσk wk−1 = wk n y xσk0 wk−1 = wk n0 ,
para ciertos monomios n, n0 ∈ S, con supp(nn0 ) ∩ set(wk ) = ∅. Por
tanto, como σk0 6= σk , tenemos que xσk y xσk0 dividen a n y n0 , respectivamente (pues xσk0 n = xσk n0 ). Pero entonces σk0 ∈
/ set(wk ), y σk0 = σl
para cierto l > k, lo cual contradice el apartado 2.
5. Por el apartado anterior, σj0 = σj para todo j < i. Por otro lado, por
el apartado 3 y el lema 3.13,
0
xσi wi−1 = wi n y xσi+1
xσi0 wi−1 = wi n0 ,
76
CAPÍTULO 3. MAPPING CONES
para ciertos monomios n, n0 ∈ S con supp(nn0 ) ∩ set(wi ) = ∅. Si fuera
σi0 6= σi , se llega a un absurdo como en el apartado anterior. Y si σi0 = σi ,
entonces wi0 = wi y s(m, α, σ 0 ) serı́a degenerado.
Estas propiedades nos dan una ligera idea de la combinatoria de los
sı́mplices s(m, α, σ), y el cuarto apartado nos garantiza que fijados m y α, no
hay dos de ellos iguales no degenerados. Deduciremos tres corolarios sencillos
que nos permitirán conocer mejor la estructura de estos sı́mplices y definir
el complejo celular que buscamos:
Corolario 3.19. Sean m ∈ G(I), α ⊂ set(m), con #α = p, y σ una permutación de α. Si s(m, α, σ) = (w0 = m, w1 , . . . , wp ) es no degenerado, entonces la clausura convexa en Rn de w0 , w1 , . . . , wp es un sı́mplice geométrico
de dimensión p.
Demostración. Denotemos por ai = (ai,1 , ai,2 , . . . , ai,n ) al vector exponente
de wi = b(xσi · · · xσ1 m), para 0 ≤ i ≤ p, y veamos que son afinmente independientes. Para ello, demostraremos primero que, si 1 ≤ j ≤ p,
si i < j
aj−1,σj ,
ai,σj =
aj−1,σj + 1, si i = j.
Si i < j, entonces tenemos que xσi wi−1 = wi n, para cierto monomio n ∈ S
con supp(n) ∩ set(wi ) = ∅. Ahora, por el apartado 2 del lema anterior,
σj ∈ set(wi ), por lo que el exponente en xσj es igual para wi−1 y wi , y por
tanto, ai,σj = aj−1,σj . Por otro lado, xσj wj−1 = wj n0 , para cierto monomio
n0 ∈ S con supp(n0 ) ∩ set(wj ) = ∅. Pero xσj no puede dividir a n0 , porque si
no, dividiendo y utilizando el apartado 3 de 3.13, tendrı́amos que wi−1 = wi .
Por tanto, vemos que aj,σj = aj−1,σj + 1.
Ahora, supongamos que λ0 a0 +λ1 a1 +. . .+λp ap = 0 y λ0 +λ1 +. . .+λp = 0.
Entonces,
(ap,σp − 1)(λ0 + λ1 + . . . + λp−1 ) + ap,σp λp = 0,
de donde obtenemos que λp = 0, y por inducción en orden decreciente, vemos
que λp−1 = 0, λp−2 = 0, etc.
Corolario 3.20. Sean m ∈ G(I), α ⊂ set(m), con #α = p, y σ una permutación de α. Si s(m, α, σ) es degenerado, entonces existe una permutación
3.4. LA RESOLUCIÓN DE ELIAHOU-KERVAIRE ES CELULAR
77
σ 0 de α tal que s(m, α, σ) es una cara de s(m, α, σ 0 ) y este es no degenerado.
En particular, la clausura convexa de los elementos de s(m, α, σ) también
forman un sı́mplice.
Demostración. Procedemos por inducción decreciente en el número de monomios
distintos que aparacen en s(m, α, σ). Pongamos s(m, α, σ) = (w0 = m, w1 , . . . , wp )
y tomemos i el primer ı́ndice tal que wi+1 = wi (i ≥ 1). Sea
σ 0 = (σ1 , . . . , σi−1 , σi+1 , σi , σi+2 , . . . , σp ).
Si b(xσi+1 wi−1 ) 6= wi−1 , entonces s(m, α, σ 0 ) tiene un elemento distinto más
y concluimos por inducción. Si b(xσi+1 wi−1 ) = wi−1 , entonces tomamos la
permutación
σ 00 = (σ1 , . . . , σi−2 , σi+1 , σi−1 , σi , σi+2 , . . . , σp ),
etc. En el peor de los casos, llegamos a la permutación
τ = (σi+1 , σ1 , σ2 , . . . , σd
i+1 , . . . , σp ),
y como m 6= b(xσi+1 m), tenemos que s(m, α, τ ) tiene un elemento distinto
más.
En particular, vemos que para cada α ⊂ set(m), existe una permutación
σ de α tal que s(m, α, σ) es no degenerado. Para el siguiente corolario, necesitamos una definición:
Definición 3.21. Sean m ∈ G(I), α ⊂ set(m), y σ una permutación de α tal
que s(m, α, σ) es no degenerado. En esta sección, llamamos caras propias
de s(m, α, σ) a sus caras F de dimensión dim(s(m, α, σ)) − 1. Decimos que F
es exterior si no es una cara propia de otro sı́mplice de la forma s(m, α, σ 0 ),
para otra permutación σ 0 de α, y en caso contrario, decimos que es interior.
La clave de la construcción celular posterior será cómo se disponen las
caras propias de unos sı́mplices respecto a otros:
Corolario 3.22. Sean m ∈ G(I), α ⊂ set(m), con #α = p, y σ una permutación de α. Pongamos s(m, α, σ) = (w0 = m, w1 , . . . , wp ) y supongamos
que es no degenerado. Sea F = {w0 , w1 , . . . , w
bi , . . . , wp } una cara propia suya.
Entonces:
78
CAPÍTULO 3. MAPPING CONES
1. F es interior si, y sólo si, 1 ≤ i < p y σi ∈ set(b(xσi+1 wi−1 )). En tal
caso, F es cara propia de exactamente dos sı́mplices no degenerados:
s(m, α, σ) y s(m, α, σ 0 ), donde σ 0 = (σ1 , . . . , σi−1 , σi+1 , σi , . . . , σp ).
2. Supongamos que F es exterior. Entonces, si i = 0, F = s(b(xσ1 m), α \
σ1 , τ ), con τ = (σ2 , σ3 , . . . , σp ). Y si 1 ≤ i ≤ p, entonces F = s(m, α \
σi , τ ), con τ = (σ1 , . . . , σbi , . . . , σp ). En ambos casos, F es no degenerado.
Demostración. Si i = 0, entonces es claro que F = s(b(xσ1 m), α \ σ1 , τ ),
con τ = (σ2 , σ3 , . . . , σp ), y no puede ser cara propia de otro sı́mplice no
degenerado s(m, α, σ 0 ) por el apartado 4 de 3.18. Y si i = p, entonces F =
s(m, α \ σp , τ ), con τ = (σ1 , . . . , σp−1 ) y es exterior, de nuevo por el apartado
4 de 3.18.
Supongamos ahora que 1 ≤ i < p y que F es cara propia de un sı́mplice
no degenerado s(m, α, σ 00 ) = (w000 = m, w100 , . . . , wp00 ), por los apartados 4 y 5
de 3.18, debe ser wj00 = wj , para todo j 6= i, y σj00 = σj , para todo j < i. Como
00
wi+1
= wi+1 , tenemos que
0
00 xσ 00 wi−1 = wi+1 n ,
xσi+1 xσi wi−1 = wi+1 n y xσi+1
i
para ciertos monomios n, n0 ∈ S tales que supp(nn0 ) ∩ set(wi+1 ) = ∅. Por
00
00
00 xσ 00 n, y debe ser {σi , σi+1 } = {σ , σ
tanto, xσi+1 xσi n0 = xσi+1
i+1 }, pues si no
i
i
llegarı́amos a que σj ∈
/ set(wi+1 ) para cierto j > i + 1, lo que contradirı́a el
apartado 2 de 3.18. Por tanto, σ 00 = σ ó σ 00 = σ 0 = (σ1 , . . . , σi−1 , σi+1 , σi , . . . , σp ),
y tenemos dos casos:
1. Si σi ∈ set(b(xσi+1 wi−1 )), entonces por el apartado 3 de 3.13, s(m, α, σ 0 )
es no degenerado y F es cara propia suya, por lo que F es interior y
pertenece solamente a los sı́mplices s(m, α, σ) y s(m, α, σ 0 ).
2. Si σi ∈
/ set(b(xσi+1 wi−1 )), entonces s(m, α, σ 0 ) es degenerado, y F es
exterior, porque s(m, α, σ) es el único sı́mplice no degenerado al que
pertenece.
3.4. LA RESOLUCIÓN DE ELIAHOU-KERVAIRE ES CELULAR
79
Con estos preliminares, ya podemos definir el complejo celular que buscamos. Dado m ∈ G(I) y α ⊂ set(m), definimos la célula C(m, α) como
[
C(m, α) = (s(m, α, σ)),
σ
donde podemos tomar la unión conjuntista en Rn ó la unión disjunta de dichos
sı́mplices geométricos e identificar las caras propias comunes. Como cada uno
de esos sı́mplices es una cara de otro no degenerado, podemos limitarnos a
considerar sólo estos últimos. En el siguiente teorema recogemos el hecho de
que estas células realmente proporcionan un complejo celular tal y como los
definimos en la sección 2.2, aunque nos referiremos al artı́culo original [DM]
para la demostración rigurosa, ya que se necesitan resultados topológicos que
omitiremos:
Teorema 3.23. Considerando una realización geométrica en Rr , identificando mi ∈ G(I) con el i-ésimo vector de la base canónica, o la realización anterior en Rn , tenemos
S que X = (|X|, Γ), con Γ = {C(m, α)/m ∈ G(I) y α ⊂
set(m)} y |X| = Γ, constituye un complejo celular en el que los vértices
son m1 , m2 , . . . , mr , y las caras de C(m, α), si α = {j1 , j2 , . . . , jp }, son de
dos tipos: C(m, α \ ji ) y C(b(xji m), α \ ji ), para 1 ≤ i ≤ p.
Demostración. Primero, para cada par de sı́mplices S = s(m, α, σ) y G0 =
s(m, α, σ 0 ), es obvio que existe una cadena de sı́mplices Gi = s(m, α, σi ), con
G0 = G y Gq = G0 (basta considerar transposiciones de ı́ndices consecutivos
para pasar de una permutación a otra). Según [DM, theorem 3.10], esto implica que el complejo simplicial obtenido al unir los sı́mplices no degenerados
de la forma s(m, α, σ), variando σ, es lo que se suele denominar “shellable”.
Un complejo simplicial ∆ se dice que es “shellable” si sus caras maximales
se pueden ordenar F1 , F2 , . . . , Fq , de forma que (∪j−1
i=1 Fi ) ∩ Fj es puro de
dimensión dim(Fj ) − 1, para j = 2, 3, . . . , q, donde “puro” quiere decir que
todas sus caras maximales tienen la misma dimensión. Por esta propiedad,
junto con la forma en que las caras propias de los sı́mplices no degenerados
s(m, α, σ) se disponen y [DK, proposition 1.2], obtenemos que C(m, α) son
homeomorfos a bolas cerradas de la dimensión correspondiente, y X es un
complejo celular (para que se corresponda exactamente con la definición 2.15,
deberı́amos considerar el interior de las células C(m, α)).
Ahora, las caras de C(m, α) estarán formadas por caras exteriores F de
ciertos s(m, α, σ) no degenerados, pues las interiores “desaparecen” al pegar
80
CAPÍTULO 3. MAPPING CONES
los correspondientes sı́mplices. Dichas caras exteriores, por 3.22, deben ser
de la forma F = s(m, α \σi , τ ), con τ = (σ1 , . . . , σbi , . . . , σp ), para 1 ≤ i ≤ p, o
de la forma F = s(b(xσ1 m), α \ σ1 , τ ), con τ = (σ2 , σ3 , . . . , σp ). Los primeros
proporcionan células de la forma C(m, α \ ji ), y los segundos, células de la
forma C(b(xji m), α \ ji ).
Ejemplo 3.24. Veamos con un ejemplo cómo la propiedad de ser “shellable”,
junto con el corolario 3.22, nos permiten concluir que la construcción realizada da un complejo celular.
Tomemos el ideal I = hx1 x2 , x1 x3 , x1 x5 , x2 x3 , x2 x5 , x3 x5 , x4 x5 i, y denotemos por mi , para 1 ≤ i ≤ 7, a dichos generadores, con este orden. Entonces el ideal I admite cocientes lineales y función de descomposición regular, y si tomamos m = m7 y α = set(m7 ) = {1, 2, 3}, se comprueba fácilmente que los sı́mplices no degenerados que obtenemos son F1 = {1, 2, 3, 7},
F2 = {1, 2, 6, 7}, F3 = {1, 4, 6, 7} y F4 = {1, 4, 5, 7}, donde hemos identificado
i = mi :
3
5
7
2
4
1
6
Figura 3.1:
Los sı́mplices tridimensionales F1 , F2 , F3 , F4 forman las caras maximales
de este complejo simplicial, y con dicho orden vemos que se cumple la propiedad de ser “shellable”. Pegando entonces dichos sı́mplices por las caras
interiores obtenemos la célula tridimensional C(m7 , set(m7 )), y se puede com-
3.4. LA RESOLUCIÓN DE ELIAHOU-KERVAIRE ES CELULAR
81
probar que, a su vez, las caras exteriores también se pegan formando las caras
de dicha célula.
Finalmente, sólo nos queda definir una función de incidencia para
obtener el complejo de cadenas etiquetado FX , donde la forma de etiquetar X es la obvia. Para ello, tenemos dos estrategias. Por un lado, podemos
proceder como en [DM, lemmas 3.8 y 3.9] y definir orientaciones en los
sı́mplices s(m, α, σ) de forma coherente y definir la diferencial del complejo X de forma intrı́nseca, o podemos directamente dar una fórmula para la
función de incidencia y comprobar que verifica las propiedades de la definición 2.18. Procederemos de esta última forma, que es más directa, aunque
perdemos información topológica intrı́nseca a las células C(m, α):
Definición 3.25. Definimos la función de incidencia en X de la siguiente
forma: para cada m ∈ G(I) y cada α = {j1 , j2 , . . . , jp } ⊂ set(m), con j1 <
j2 < . . . < jp , sean
(C(m, α\ji ), C(m, α)) = (−1)i+1
y (C(b(xji m), α\ji ), C(m, α)) = (−1)i ,
y 0 en el resto de casos. Definimos también (∅, mi ) = 1.
La condición 1 de la definición 2.18 se deduce del teorema anterior, y
la condición 3 es un cálculo sencillo que omitimos por brevedad. Ahora,
al construir el complejo de cadenas etiquetado FX asociado a X y
m1 , m2 , . . . , mr , tenemos que comprobar que la multigraduación dada por
la definición 2.20 es mdeg(C(m, {j1 , . . . , jp })) = xj1 · · · xjp m. Por un lado,
los vértices de C(m, α) son, por construcción, los de la forma b(xβ m), con
β ⊂ α. Ahora, xβ m = m0 n, con set(m0 ) ∩ supp(n) = ∅, por lo que xβ no
divide a n, ya que set(m) ⊂ set(m0 ), y por tanto, es claro que el mı́nimo
común múltiplo de todos los b(xβ m) es xα m.
Debido a todo lo anterior, obtenemos el teorema que habı́amos anunciado:
Teorema 3.26. Sea I ⊂ S un ideal monomial con cocientes lineales para el
orden G(I) = {m1 , m2 , . . . , mr }, y cuya función de descomposición es regular. Entonces, para dicho orden, la resolución de S/I obtenida por mapping
cones iterados es minimal y celular, coincidiendo con el complejo de cadenas etiquetado FX asociado al complejo celular anterior X y los monomios
m1 , m2 , . . . , mr .
82
CAPÍTULO 3. MAPPING CONES
Veamos, para concluir, un par de ejemplos:
Ejemplo 3.27. Consideremos, en S = k[x, y, z], los ideales I = hx2 , xy, y 3 , xz 2 i
y J = hx2 , xy, y 2 , xz, yzi, con el orden usual de las variables. Dichos ideales
son fuertemente estables y el orden de los generadores dado es el que aparece
en 3.9. En el caso de I, su resolución minimal es de hecho simplicial, mientras que en el caso de J, es polihedral pero no simplicial. Los complejos que
soportan dichas resoluciones son los siguientes:
x2
x2
x2 y
x2 z 2
x2 y
x2 yz 2
x2 yz
xy
xy
xz 2
xyz 2
x2 z
xz
xyz
xy 2 z
xy 2
xy 3
y2
y3
(a) Resolución de I.
y2z
xyz
yz
(b) Resolución de J.
Figura 3.2: Complejos que soportan las resoluciones de I y J.
Ejemplo 3.28. Es interesante estudiar la resolución minimal de los ideales
de la forma I = md , para cierto d > 0, que como vimos en la sección 1.4, son
fuertemente estables. En [Mer] y [DM] se afirma que, en dicho caso, la resolución de Eliahou-Kervaire se obtiene como un subcomplejo de un complejo
simplicial dilatado y subdividido. El caso aún más particular de dos variables,
I = hx, yid = hxd , xd−1 y, xd−2 y 2 , . . . , xy d−1 , y d i, es particularmente sencillo.
En este caso, la resolución está soportada por un segmento subdividido en d
segmentos:
xd
xd−1 y
xd−2 y 2
xd−3 y 3
Figura 3.3:
x2 y d−2
xy d−1
yd
Bibliografı́a
[AM] M. F. Atiyah & I. G. Macdonald, Introducción al álgebra conmutativa,
Reverté Barcelona Buenos Aires Caracas, 1973
[BSti] D. Bayer, M. Stillman, A criterion for detecting m-regularity, Invent.
Math. 87 (1987), 1-11.
[BStu] D. Bayer, B. Sturmfels, Cellular resolutions of monomial modules,
J. Reine Angew. Math. 502 (1998), 123-140.
[BPS] D. Bayer, I. Peeva, B. Sturmfels, Monomial resolutions, Math. Res.
Lett. 5 (1998), no. 1-2, 31-46.
[BH] W. Bruns, J. Herzog, Cohen-Macaulay rings, Cambridge University
Press, 1996
[DK] G. Danaraj, V. Klee, Shellings of spheres and polytopes, Duke Math.
J. 41 (2) (1974), 443-451.
[DM] A. Dochtermann, F. Mohammadi, Cellular resolutions from mapping
cones, arXiv: 1311.4599, Preprint 19 November 2013
[Eis] D. Eisenbud, Commutative algebra with a view toward algebraic geometry, Graduate Texts in Mathematics 150, Springer Berlin Heidelberg
New York, 1995
[EK] S. Eliahou, M. Kervaire, Minimal resolutions of some monomial ideals,
J. Algebra, 129 (1990), 1-25
[EC] G. Evans, H. Charalambous, Resolutions obtained by iterated mapping
cones, J. Algebra, 176 (1995), 750-754
83
84
BIBLIOGRAFÍA
[Goo] A. Goodarzi, Cellular structure for the Herzog-Takayama Resolution,
arXiv:1305.4302, Preprint 6 February 2014
[HT] J. Herzog, Y. Takayama, Resolutions by mapping cones, Homology,
Homotopy and Applications, 4 (2), 2002, 277-294
[Mas] W.S. Massey, Singular Homology Theory, Graduate Texts in Mathematics 70, Springer Berlin Heidelberg New York, 1980
[Mar] U. Martı́nez Peñas, Una introducción a la teorı́a de las sicigias, Trabajo de Fin de Grado, Universidad de Valladolid, 2013
[Mer] J. Mermin, The Eliahou-Kervaire resolution is cellular, J. Commutative Algebra 2 (2010), no. 1, 55-78
[MS] E. Miller & B. Sturmfels, Combinatorial commutative algebra, Graduate Texts in Mathematics 227, Springer Berlin Heidelberg New York,
2005
[Pee] I. Peeva, Graded syzygies, Algebra and Applications Volume 14,
Springer Berlin Heidelberg New York, 2011
[PS] I. Peeva, M. Stillman, The minimal free resolution of a Borel ideal,
Expositiones Math. 26 (2008), 237-247
[Rot] J.J. Rotman, An introduction to algebraic topology, Graduate Texts in
Mathematics 119, Springer Berlin Heidelberg New York, 1988
[Vel] M. Velasco, Minimal free resolutions that are not supported by a CWcomplex, J. Algebra, 319 (2008), no. 1, 102-114
[Wei] C. Weibel, An introduction to homological algebra, Cambridge studies
in advanced mathematics 38, Cambridge University Press, 1994